多自由度柔性機械臂非線性連續時變反饋控制方法
2024-08-28 00:00:00江峰蘇麒
機械制造與自動化 2024年2期
摘"要:針對當前多自由度柔性機械臂控制過程中,機械臂定位控制系數選擇合理性較低,導致多自由度柔性機械臂控制時延較長且運動軌跡與預設軌跡存在較大差異的問題,提出多自由度柔性機械臂非線性連續時變反饋控制方法。將拉格朗日算子作為計算基礎,以能量的方式構建多自由度柔性機械臂動力學模型。考慮到機械臂的負載狀態,計算機械臂的重力矩,識別機械臂非線性連續時變反饋控制參數。設定非線性連續時變反饋控制規則,構建機械臂非線性控制器,實現機械臂定位控制。構建實驗環節,實驗結果表明:該方法可有效提升機械臂運動軌跡與預設軌跡的一致性,縮短機械臂定位控制時延,進一步提升機械臂應用效果。
關鍵詞:自適應控制;多自由度柔性機械臂;反饋控制;連續時變;定位控制;動態面控制
中圖分類號:TP24""文獻標志碼:A""文章編號:1671-5276(2024)02-0193-05
Nonlinear Continuous Time-varying Feedback Control Method for Multi-degree of Freedom Flexible Manipulators
JIANG Feng, SU Qi
(CNCCC Tongan City Industry Integration Construction Anqing Co., Ltd., Anqing 246003,China)
Abstract:In order to solve the long control delay of the multi degree of freedom flexible manipulator and the large difference between the motion trajectory caused by by low rationality of the selection of the positioning control coefficient of the multi degree of freedom flexible manipulator in the current control process of the manipulator, a nonlinear continuous time-varying feedback control method for the multi degree of freedom flexible manipulator is proposed. Based on the Lagrangian operator, the dynamic model of a multi DOF flexible manipulator is built in the form of energy. Considering the load state of the manipulator and the heavy torque of the manipulator, the nonlinear continuous time-varying feedback control parameters of the manipulator are identified. The non-linear controller of the manipulator is constructed by setting the nonlinear continuous time-varying feedback control rules to realize the positioning control of the manipulator. The experimental results show that the proposed method can effectively improve the consistency of the manipulator motion track and the preset track, shorten the manipulator positioning control delay, and further reinforce the application effect of the manipulator.
Keywords:adaptive control;multi-degree of freedom flexible manipulator;feedback control;continuous time-varying;positioning control;dynamic face control
0"引言
工業的發展是多種行業進步的基石,機器人的出現使工業的發展邁上了一個大臺階。自第四次工業革命起,工業發展走上了快車道,工業機器人成為影響人們生產、生活的重要設備。機械臂作為工業機器人中最為重要的一種機械裝置,對其展開全面的研究對于工業的發展具有重要的科學價值與使用價值[1-2]。常見的機械臂機器人可簡單地分為剛性機器人和柔性機器人。剛性機械臂具有結構簡單、執行工作精度高的優點,所以被廣泛地應用到工業、制造業中。但其存在相應的不足,此類機械臂自身質量過大,能耗較高,難以在較小的工作空間中應用。柔性機器人具有較高的負荷質量比,可應用到較為復雜的環境中。因此,多自由度柔性機械臂可從事搬運、裝配等工作。柔性機械臂雖然具有較多優點,但其控制過程中極易出現控制精度較差的問題,需要設定較為科學的控制方法[3]。
在過往的研究中,大量的專家學者提出了一系列多自由度柔性機械臂控制方法。此部分方法具有較高的應用價值,但當機械臂工作過程中存在非線性干擾時,機械臂運動過程存在運動位置異常的問題[4-5]。針對此問題,在此研究中提出多自由度柔性機械臂非線性連續時變反饋控制方法,希望通過此方法為機械臂的控制以及機械臂控制技術發展提供依據。
1"構建多自由度柔性機械臂動力學模型
此次研究將拉格朗日算子[6-7]作為計算基礎,以能量的方式構建多自由度柔性機械臂動力學模型,以此避免計算中存在較為復雜的約束力,直接搭建主動力與運動之間的關系模型。
在以往的研究中,機械臂的動能A與此運動臂的位能之差得到的函數為此次研究中使用的拉格朗日函數L:
L(ai,ai0)=A-G(1)
根據此公式,得到拉格朗日方程:
Fi=tαLαai0-αLαai(2)
式中:ai表示機械臂的廣義坐標;ai0表示機械臂的廣義速度;Fi表示廣義力矩;表示拉格朗日計算系數。應用此公式對機械臂的電機轉子、連桿以及關節的動能與勢能展開計算。通過文獻研究發現,連桿速度不會對電機速度造成影響。因此,連桿的動能可表示為
D(ai,ai0)=ati0Gi(a)a~2(3)
式中:a表示連桿的位置矢量;Gi(a)表示連桿的慣性矩陣。電機轉子的速度主要由連桿的牽連速度與相對速度組成,此時電機轉子的動能可表示為
E(β,ai,ai0)=∑ni=1(H0i,r)Gi,rH0i,r2(4)
式中:β表示機械臂電機傳動系數;n表示機械臂連桿的數量;H0i,r表示電機轉子的速度;Gi,r表示連桿的慣性矩陣。對上述公式進行整理,將其轉化為矢量計算公式,則有
E(β,ai,ai0)=βai0TGi(a)U(a)U(a)TCβai02(5)
式中:C表示經過減速比后的電機轉子的轉動慣性;U(a)表示耦合部分的慣性矩陣。此時多自由度柔性機械臂動能[8-9]可表示為
E(β,ai,ai0)=CE(β,ai,ai0)+E(ai,ai0)2(6)
則勢能表達式可表示為
R(β,a)=(β-a)tx(β-a)+Vi(a)2(7)
將上述計算結果代入拉格朗日函數中,得到自由度柔性機械臂動力學方程[10]:
C(a)β′a′i0+(ai,ai0)β
ai0+g(a)-x(β-a)x(β-a)=ηextηm(8)
式中:C(a)表示完整機械臂動力學模型的慣性矩陣;g(a)表示重力矩陣。對上述公式進行整理,將其作為此次機械臂控制方法提出的基礎。
2"機械臂非線性連續時變反饋控制方法設計
根據機械臂動力學模型,結合當前機械臂控制操作環節,在此研究中提出機械臂非線性連續時變反饋控制方法,具體控制過程如圖1所示。
此次研究中,將機械臂的控制過程設定為3個部分,分別對應控制初期、控制中期以及控制后期,針對線性擾動以及機械臂的實時狀態進行針對性優化,以此提升對機械臂的控制能力。
2.1"機械臂非線性連續時變反饋控制參數識別
在多自由度柔性機械臂的工作過程中,存在負載與非負載兩種工況[11-12]。為保證機械臂的負載在任何工況下能夠保持平衡,進一步提升機械臂工作的平穩性,需要對機械臂的重力矩展開計算[13]:
Sl1=s1g1W1cos(δ+δ1)+s2g2W2cos(δ+δ2)
Sl2=s1g1W1cos(δ+δ1)(9)
式中:SI1表示負載工況下機械臂的重力矩;SI2表示非負載工況下機械臂重力矩;s1表示連桿質量;s2表示機械臂的質量;g1表示連桿重力補償參量;g2表示機械臂重力補償參量;W1表示機械臂連桿質心到機械臂中心的距離;W2表示機械臂負載品質心到機械臂中心的距離;δ1表示連軸質心到負載品質心連接線與水平線的夾角;δ2表示負載品質心到機械臂中心連線與水平線之間的夾角。通過此公式可以發現,在負載與非負載兩種環境下機械臂的重力矩差異較大[14]。基于機械臂平衡性考慮,機械臂的力矩應控制在式(9)中兩計算式的重力矩之間。在確定重力矩之后,對機械臂的控制參數進行辨識:
min f(μ,ν,ρ)
s.t."μ∈μi=μi,μj
ν∈νi=νi,νj
ρ∈ρi=ρi,ρj(10)
式中:μ表示待檢測動態參數;ν表示待檢測重力矩參數;ρ表示待檢測平衡系數。使用此公式,確定控制參數,為后續的研究提供基礎。
2.2"機械臂非線性控制器構建
此次研究中,將現有的機械臂控制系統描述為下述形式:
s~=W′s+Hsat()+Jz
v=G′1s+B1z
o=G′2s+B2z(11)
控制外部系統可表示為
z~=Ez(12)
式中:s表示機械臂的實時運動狀態;z表示外部控制系統的運行狀態;v表示測量輸出值;o表示原有控制系統的控制輸出矩陣。sat表示控制器的飽和程度[15-16],通過公式可將其表示為
sat()=sign()min,max(13)
根據此公式,設計非線性連續時變反饋控制器。線性控制規律可表示為
f′=A′o+Jx′(14)
式中:x′表示參考輸入向量;A′表示反饋增益矩陣。根據此公式,獲取反饋增益矩陣
d′=A′+B′f′mn(15)
應用式(15)計算結果,得到非線性反饋控制規律,具體公式設定如下:
fn′=A′+B′f′mn(A′o+Jx′)δ(16)
式中δ表示機械臂控制過程中的阻尼系數。將此公式作為此次研究中的控制規則,根據此規則設計機械臂連續時變反饋控制器。假設控制規律能夠使機械臂控制器q根據預設的控制目標得到期望軌跡qi,在此條件的控制誤差可表示為
c(t)=r(t)-f′n(t)(17)
式中r(t)表示預設控制輸出向量。為實現連續時變反饋控制,在此控制器中增加正光滑遞減函數,以此對機械臂進行穩態與瞬態控制,則有
μ(t)=(μ0-μ∞)p-nt
-γμ(t)<p(t)<γ~μ(t)(18)
式中:-γ表示機械臂異常控制值;γ~表示機械臂正常控制值。使用此公式達到機械臂反饋控制的目標。在此研究中,將機械臂非線性連續時變反饋控制參數識別結果帶入此控制器中,完成機械臂的連續時變反饋控制。對上文中設定的內容進行整理分析,采用將其有序連接為方法的形式。至此,多自由度柔性機械臂非線性連續時變反饋控制方法設計完成。
3"實驗論證分析
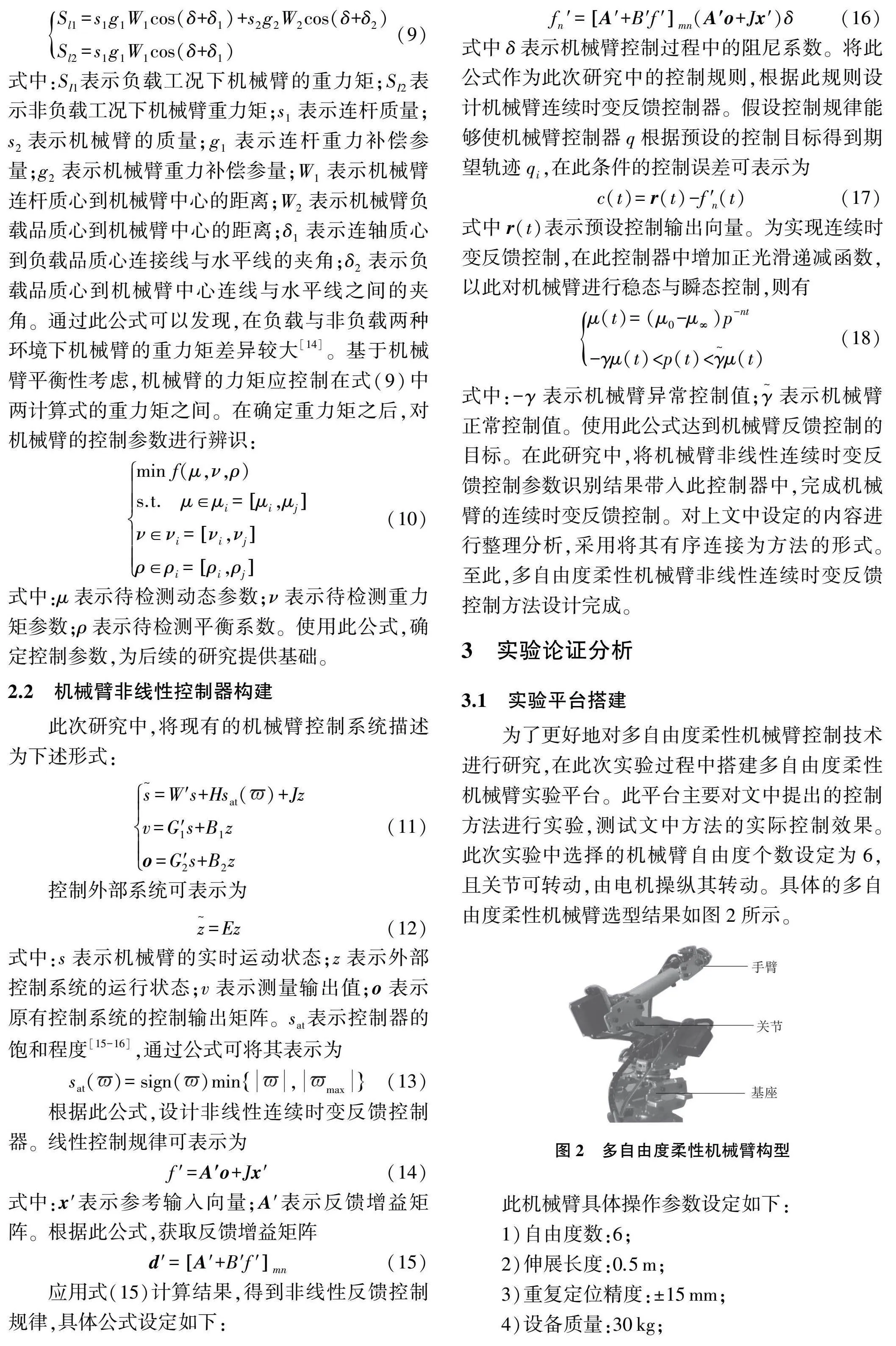
3.1"實驗平臺搭建
為了更好地對多自由度柔性機械臂控制技術進行研究,在此次實驗過程中搭建多自由度柔性機械臂實驗平臺。此平臺主要對文中提出的控制方法進行實驗,測試文中方法的實際控制效果。此次實驗中選擇的機械臂自由度個數設定為6,且關節可轉動,由電機操縱其轉動。具體的多自由度柔性機械臂選型結果如圖2所示。
此機械臂具體操作參數設定如下:
1)自由度數:6;
2)伸展長度:0.5m;
3)重復定位精度:±15mm;
4)設備質量:30kg;
5)負載:2 kg。
除去上述機械臂設備外,在現有的實驗平臺基礎上,搭建適合此次實驗的新型實驗平臺。對原有的實驗平臺數據庫與數據采集設備進行完善與優化,提升此實驗平臺的數據采集、存儲與分析能力,為后續的實驗對比提供數據基礎。此實驗平臺中應用了多個數據服務網以及位移感應器,以便于獲取機械臂在控制過程中產生的數據。將上述平臺構建完成后,應用其作為此次實驗的基礎。
3.2"實驗參數設定
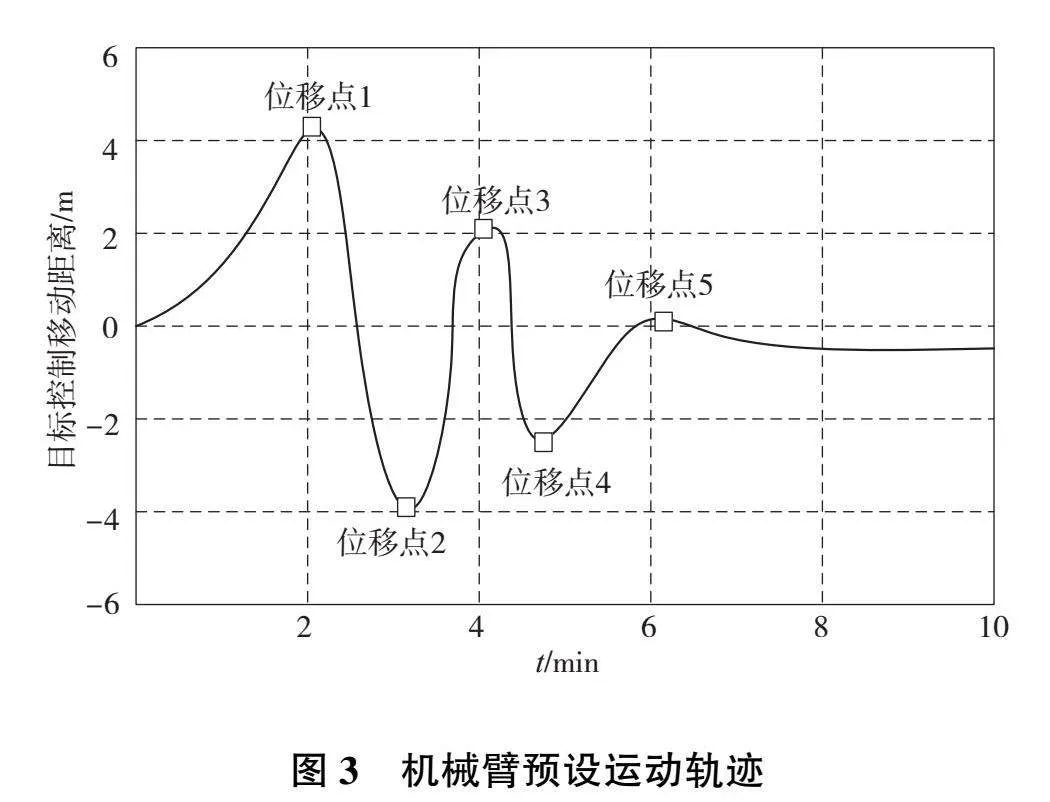
在此次實驗過程中,將機械臂的初始狀態設定為(η,η~)=(0,0);機械臂的目標控制坐標為(η1,η1~)=(0.70,0);機械臂目標角度設定為60°。在此次研究中,將實驗對比指標設定為3部分,分別為機械臂運動曲線與期望軌跡差異、機械臂運動位移控制時延以及控制輸出量與預設量差異度。為了更好地完成實驗,獲取真實實驗結果。在此研究中,選擇基礎控制方法以及輸出約束控制方法與文中控制方法進行對比,對比不同控制方法的應用效果。此次實驗中預設的機械臂運行軌跡如圖3所示。
在此次實驗中,將圖3中內容作為機械臂控制目標,其速率和幅度均有不同程度的非線性變化以測試設計方法在非線性連續動作中實際運動曲線與期望軌跡的差異,驗證其精準性。根據此目標,對實驗對象進行控制,獲取實驗結果。
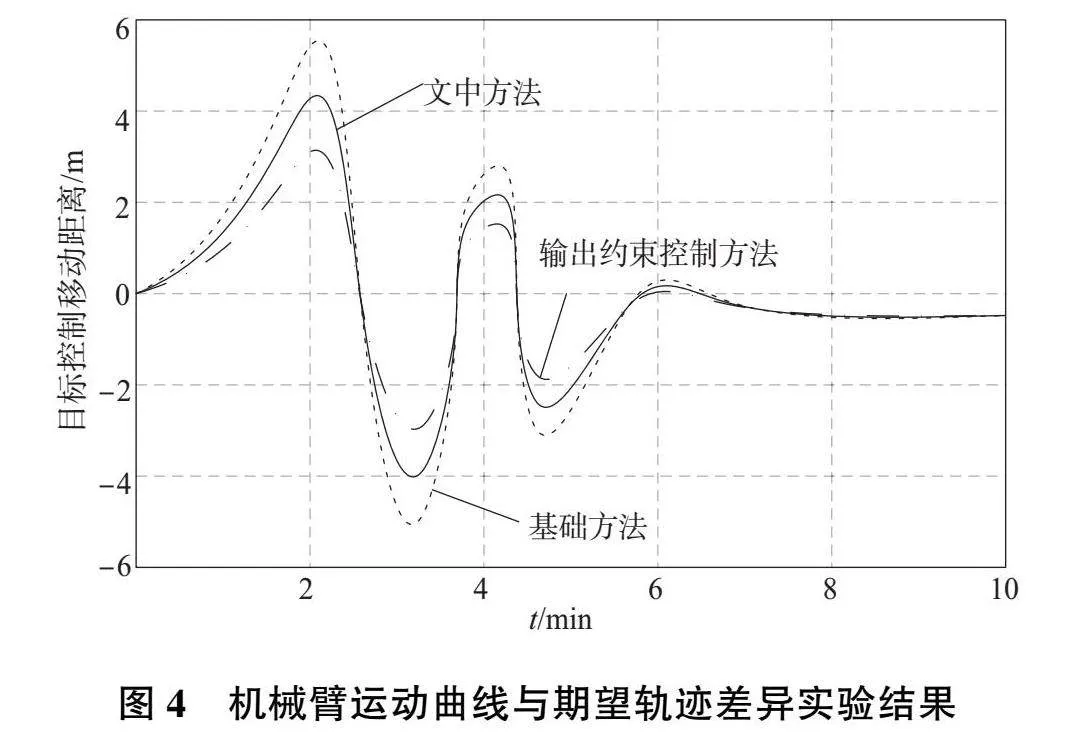
3.3"機械臂運動曲線與期望軌跡差異實驗
按照上文設定的實驗方案,對比機械臂運動曲線與期望軌跡的差異,具體實驗結果如圖4所示。
對上述實驗結果進行分析可以看出,不論是文中方法還是其他兩種方法在對機械臂進行控制時都存在一定的差異。但對3種方法進行對比可以看出,文中方法應用后的運動軌跡與期望軌跡的走向較為一致。其他兩種方法應用后所得運動軌跡與期望軌跡整體走向相差較大。整理上述實驗結果可以發現,文中方法應用后可對機械臂進行較高的定位,提升機械臂的定位精度,保證機械臂運動軌跡與期望軌跡一致。這是因為文中方法考慮了機械臂的負載狀態,計算機械臂的重力矩,能夠對機械臂非線性連續時變反饋控制參數進行識別,提高了控制精度。
3.4"機械臂運動位移控制時延實驗
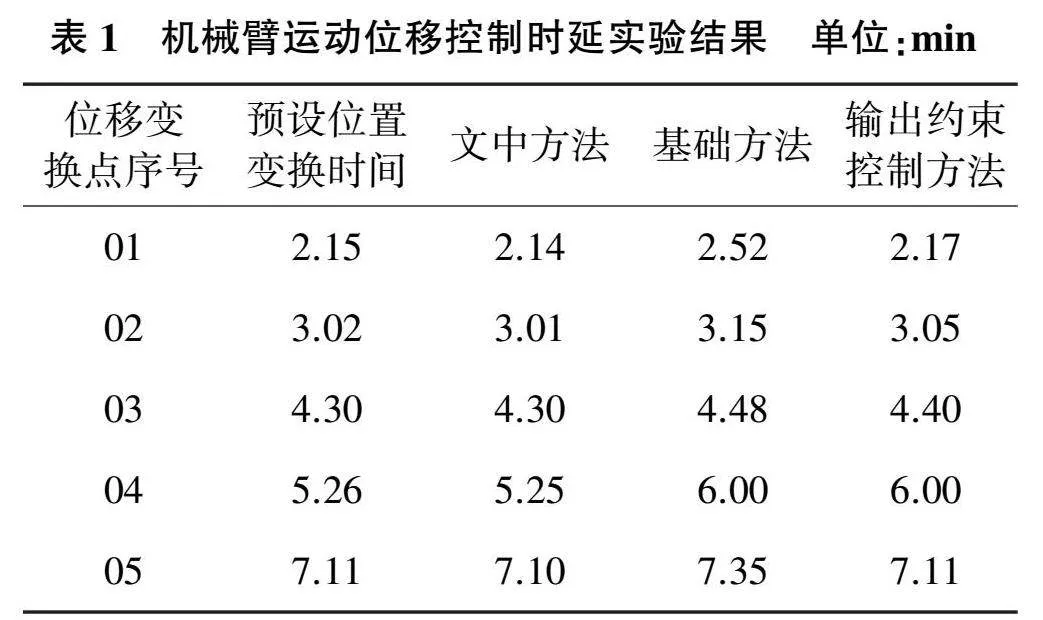
如圖4所示,在此次實驗中機械臂共計5個位移點。將此部分位移點進行排序,分別為01—05,獲取每個位移點的位置變換時間,將其作為此次實驗中的對照組。使用文中方法與其他兩種方法對機械臂進行控制并獲取位置變換時間點,將其作為此次實驗結果,以此確定不同控制方法的控制時延。具體實驗結果如表1所示。
對表1中的實驗結果進行分析可以看出,文中方法在應用后可在最短的時間內使機械臂達到目標位置,進一步縮短控制時間。與文中方法相比,其他兩種方法的控制過程較差,控制時延相對較大,整體應用效果不佳。在日后的研究中還需對此兩部分方法進行完善與優化。這是因為文中方法設定了非線性連續時變反饋控制規則,進一步構建機械臂非線性控制器,提高了機械臂定位控制的性能。
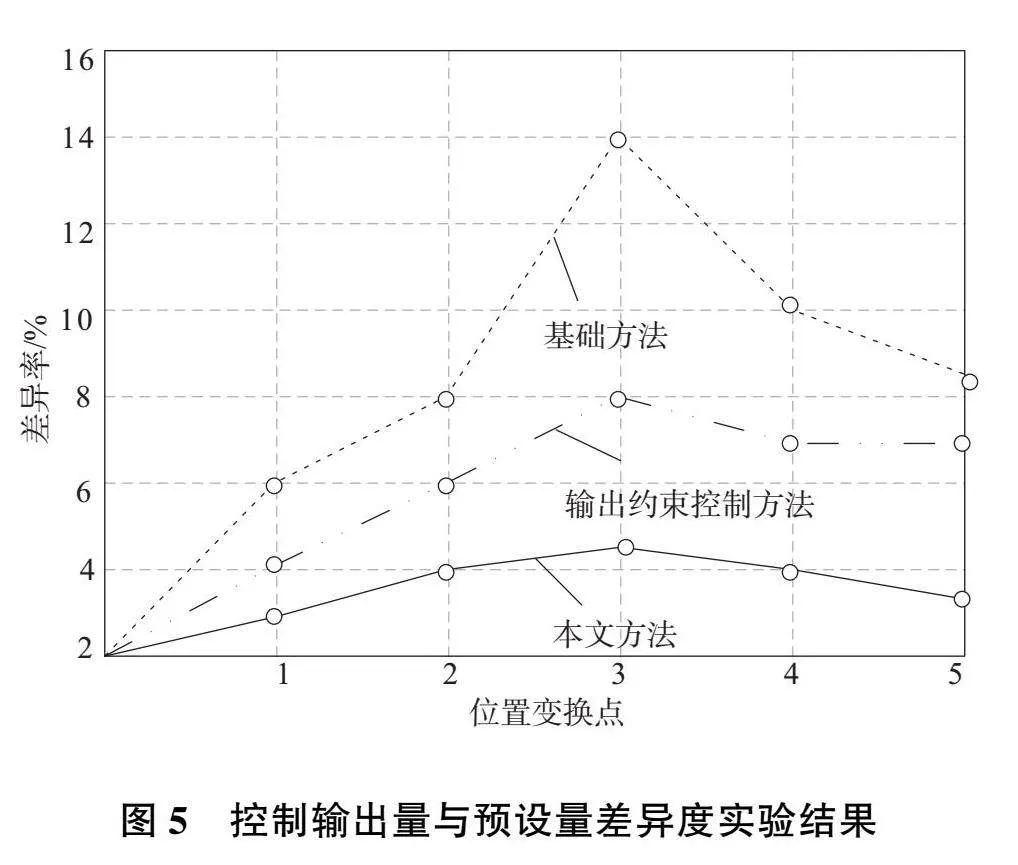
3.5"控制輸出量與預設量差異度實驗
控制輸出量與預設量差異度實驗結果如圖5所示。
圖5"控制輸出量與預設量差異度實驗結果
對圖5中的實驗結果進行分析可以看出,3種方法的控制輸出值與預設輸出值存在一定的差異,但文中方法的差異度相對較低,文中方法輸出的控制值與預設值較為一致。與文中方法相比,其他兩種方法的控制輸出值與預設值差異較大,此兩種方法的控制能力與控制水平相對較低。整理上述實驗結果可以確定,文中方法的控制能力相對較高。這是因為本文方法將拉格朗日算子作為計算基礎,以能量的方式構建多自由度柔性機械臂動力學模型,可進一步提升機械臂的運行效果。
4"結語
此次研究中提出了一種針對定位精度與時延的新型機械臂控制方法,通過實驗證實了此方法的應用性能。由于此方法對控制規則與控制器進行了大量的優化,提出了一系列的計算要求,在日后的研究中還需對其計算環節進行整理,以此保證此方法可長期應用到機械臂的控制過程中。
參考文獻:
[1] 程楊,潘尚峰. 一種多自由度康復外骨骼機械臂的虛擬分解控制[J]. 機械工程學報,2022,58(9):21-30.
[2] 潘昌忠,費湘尹,周蘭,等. 柔性關節機械臂的自適應命令濾波輸出反饋控制[J]. 西安交通大學學報,2022,56(5):199-208.
[3] 琚世杰,程良彥,閆安志. 壓電柔性機械臂振動模擬與BP-PID控制[J]. 河南理工大學學報(自然科學版),2022,41(1):107-113.
[4] 孫訓紅,陳維樂,都海波,等. 基于輸出反饋和滑模控制的一類二階非線性系統有限時間鎮定方法[J]. 控制理論與應用,2021,38(11):1727-1734.
[5] 馬天兵,宮晗,杜菲,等. 基于線結構光和優化PID的壓電柔性機械臂振動控制[J]. 光學精密工程,2021,29(11):2661-2671.
[6] 曹懷磊,鄧文翔,姚建勇. 變負載柔性機械臂復合學習控制[J]. 西安交通大學學報,2022,56(1):61-69.
[7] 郝淑英,宋宇昊,李偉雄,等. 速度反饋對多自由度微陀螺非線性影響的控制[J]. 振動工程學報,2021,34(2):227-234.
[8] 周晟,李解,高琳,等. 柔性機械臂非線性干擾觀測器的高階滑模控制[J]. 組合機床與自動化加工技術,2021(2):82-85.
[9] 王茜,侯保林. 彈藥協調器非線性連續時變反饋控制[J]. 哈爾濱工業大學學報,2021,53(2):191-200.
[10] 王茜,侯保林,姚來鵬,等. 基于干擾觀測器的彈藥傳輸機械臂非線性連續時變反饋控制[J]. 兵工學報,2020,41(11):2179-2188.
[11] 余峰,陳新元. N自由度柔性機械臂通用的動力學建模方法研究[J]. 振動與沖擊,2020,39(16):103-111.
[12] 曾偉鵬,邵輝,洪雪梅,等. 采用非線性干擾觀測器的機械臂補償型滑模控制[J]. 華僑大學學報(自然科學版),2020,41(4):415-422.
[13] 李剛,于金鵬,劉加朋,等. 基于指令濾波的機械臂有限時間輸出約束阻抗控制[J]. 機械制造與自動化,2021,50(4):150-155.
[14] 張昌,武玉強. 基于P-Rob六自由度機械臂運動學建模與仿真[J]. 包裝工程,2020,41(11):166-173.
[15] 韓江,張凱,董方方. 基于Udwadia-Kalaba方法的柔性機械臂魯棒伺服約束控制[J]. 合肥工業大學學報(自然科學版),2020,43(5):577-583.
[16] 高國華,鄭玉航,王皓. 雙臂三自由度柔性連續體機器人的運動分析及實驗研究[J]. 北京工業大學學報,2020,46(5):448-455.
收稿日期:20221018
