基于模糊WMR優(yōu)化PID方法的電機(jī)轉(zhuǎn)速控制優(yōu)化分析
2024-08-28 00:00:00段曉偉葉小暉
機(jī)械制造與自動(dòng)化 2024年2期

摘"要:針對(duì)白噪聲下傳統(tǒng)PID控制模式造成的輸出轉(zhuǎn)速顯著波動(dòng)變化的問題,開發(fā)一種通過無刷直流電機(jī)轉(zhuǎn)速進(jìn)行調(diào)節(jié)的模糊WMR-PID技術(shù)。采用模糊推理的方式確定輸出變量,根據(jù)重心分析法解模糊處理,并建立模糊WMR-PID控制模型。研究結(jié)果表明:模糊WMR-PID控制方式可以實(shí)現(xiàn)快速跟隨要求,當(dāng)初始指令速度為2 450 r/min時(shí),指令在8 s時(shí)迅速增大至3 540 r/min,14 s時(shí)又迅速降低至1 930 r/min。相對(duì)模糊PID方法,模糊WMR-PID能夠大幅降低控制動(dòng)態(tài)的超調(diào)量,說明模糊WMR-PID控制器可以實(shí)現(xiàn)理想的控制效果并達(dá)到優(yōu)異魯棒性。該研究提高了無刷直流電機(jī)轉(zhuǎn)速調(diào)節(jié)能力,表現(xiàn)出良好控制效果。
關(guān)鍵詞:無刷直流電機(jī);轉(zhuǎn)速控制;模糊自整定;超調(diào)量;魯棒性
中圖分類號(hào):TP273""文獻(xiàn)標(biāo)志碼:B""文章編號(hào):1671-5276(2024)02-0239-04
Optimization Analysis on Speed Control of DC Motor Based on Fuzzy WMR-PID Algorithm
DUAN Xiaowei1, YE Xiaohui2
(1. Sinopec Nanjing Jinling Branch Company,Nanjing 210033,China;
2. Department of Electrical Engineering and Applied Electronic Technology,Tsinghua University,Beijing 100084,China)
Abstract:In order to solve the obvious fluctuation of the output speed caused by traditional PID control mode under white noise, a fuzzy WMR-PID technology is developed to adjust the speed of brushless DC motor. The output variable is determined by fuzzy reasoning method, the fuzzy processing is solved by gravity analysis method, and the fuzzy WMR-PID control model is established. The research results show that the fuzzy WMR-PID control mode can achieve the requirement of fast following. When the initial command speed is 2 450 r/min, the command rapidly increases to 3 540 r/min at 8 s, and rapidly decreases to 1 930 r/min at 14 s. Compared with fuzzy PID method, fuzzy WMR-PID can greatly reduce the overshoot of control dynamics, which indicates that fuzzy WMR-PID controller can achieve ideal control effect with excellent robustness. The research improves the speed regulation ability of brushless DC motor andb has good control effect.
Keywords:brushless DC motor;speed control;fuzzy self-tuning;overshoot;robustness
0"引言
采用無刷直流電機(jī)(BLD-CM)進(jìn)行動(dòng)力傳輸時(shí)能夠促進(jìn)轉(zhuǎn)矩的顯著提高,同時(shí)形成緊密連接結(jié)構(gòu),促進(jìn)系統(tǒng)功率的顯著提升。到目前為止,無刷直流電機(jī)已在軍工設(shè)備、航空器材、車輛系統(tǒng)部件、精密檢測(cè)儀器等多種領(lǐng)域都獲得了越來越廣泛使用[1-3]。利用PID方法、滑模分析、模型自動(dòng)調(diào)節(jié)[4]等方式建立系統(tǒng)模型時(shí),通常容易受到外界噪聲等因素作用,而導(dǎo)致測(cè)試結(jié)果存在明顯偏差[5]。還有一些學(xué)者利用小波變換的模式設(shè)計(jì)了電機(jī)模型,再進(jìn)行實(shí)驗(yàn)測(cè)試,確保噪聲數(shù)據(jù)被充分去除,并準(zhǔn)確估算得到LDCM轉(zhuǎn)速[6]。
相關(guān)方面的研究吸引了很多的研究學(xué)者。KHAN M A等[7]根據(jù)電機(jī)轉(zhuǎn)速參數(shù)調(diào)節(jié)的方式建立了小波多分辨PID控制器。但以上研究都是關(guān)于WMR-PID控制器調(diào)速方面內(nèi)容,并沒有實(shí)現(xiàn)以WMR-PID控制器對(duì)各頻率信號(hào)進(jìn)行處理效果,并且也無法對(duì)WMR-PID控制參數(shù)起到自適應(yīng)調(diào)節(jié)作用。針對(duì)以上研究結(jié)果,文獻(xiàn)[8]以小波轉(zhuǎn)換與神經(jīng)網(wǎng)絡(luò)共同優(yōu)化處理性能,但考慮到網(wǎng)絡(luò)的訓(xùn)練過程需占用大量計(jì)算時(shí)間,而且尚未克服網(wǎng)絡(luò)系統(tǒng)過于復(fù)雜的缺陷。采用模糊算法進(jìn)行計(jì)算分析時(shí),可以通過建立簡單模型的方式來實(shí)現(xiàn),能夠有效調(diào)節(jié)非線性特征的復(fù)雜系統(tǒng)。唐偉等[9]設(shè)計(jì)了一種模糊自整定小波多分辨PID技術(shù)來實(shí)現(xiàn)無刷直流電機(jī)轉(zhuǎn)速調(diào)節(jié)的功能,該方法可以精確處理含噪信號(hào),具有良好的抗干擾效果。 張瑞成等[10]利用單神經(jīng)元PID神經(jīng)網(wǎng)絡(luò)構(gòu)建得到一種可以自主調(diào)節(jié)的負(fù)荷平衡器并同時(shí)實(shí)現(xiàn)負(fù)荷觀測(cè)功能,實(shí)現(xiàn)了同步性能的顯著提升。王婷婷等[11]開發(fā)了一種通過自適應(yīng)模糊PID方法實(shí)現(xiàn)的智能混合控制器,大幅提升了無刷直流電機(jī)的轉(zhuǎn)速跟蹤能力與動(dòng)態(tài)適應(yīng)性。經(jīng)過上述優(yōu)化后系統(tǒng)魯棒性、動(dòng)態(tài)適應(yīng)性與抗干擾效果都獲得了明顯改善。以模糊控制算法進(jìn)行處理時(shí)只需設(shè)置簡單的結(jié)構(gòu),可以滿足對(duì)非線性變化的復(fù)雜系統(tǒng)進(jìn)行有效調(diào)控。
本文設(shè)計(jì)了一種利用無刷直流電機(jī)轉(zhuǎn)速對(duì)模糊WMR-PID進(jìn)行調(diào)節(jié)的方法,可以完成WMR-PID驗(yàn)證并對(duì)各頻率信號(hào)達(dá)到準(zhǔn)確測(cè)定的性能,之后利用模糊控制的模式完成WMR-PID控制器的數(shù)據(jù)整定,接著通過仿真分析綜合評(píng)價(jià)了控制器性能。
1"WMR-PID控制原理
以本研究設(shè)計(jì)算法測(cè)試了BLDCM的轉(zhuǎn)速控制性能。進(jìn)行實(shí)際應(yīng)用時(shí),傳感器會(huì)產(chǎn)生高頻噪聲,同時(shí)會(huì)形成明顯的低頻指令和干擾信號(hào),無法有效抵抗不確定性外部因素影響,采用WMR-PID方法進(jìn)行分析則可以獲得更理想的性能。這是由于經(jīng)過多分辨(MRA)處理后能夠使信號(hào)分解為平滑過渡分量和更精確分量。
通過MRA分解速度差值u組成N層結(jié)構(gòu),以此確定趨勢(shì)分量ecj和細(xì)節(jié)分量edj,之后利用增益kcj和kdj進(jìn)行縮放,以下給出了具體計(jì)算式:
u=kcjecj+∑Nj=1kdjedj(1)
采用db4小波設(shè)置小波基函數(shù)并完成二層結(jié)構(gòu)的分解計(jì)算。圖1給出了 WMR-PID算法的調(diào)控過程,控制量計(jì)算式如下:
u=kd1ed1+kd2ed2+kc2ec2(2)
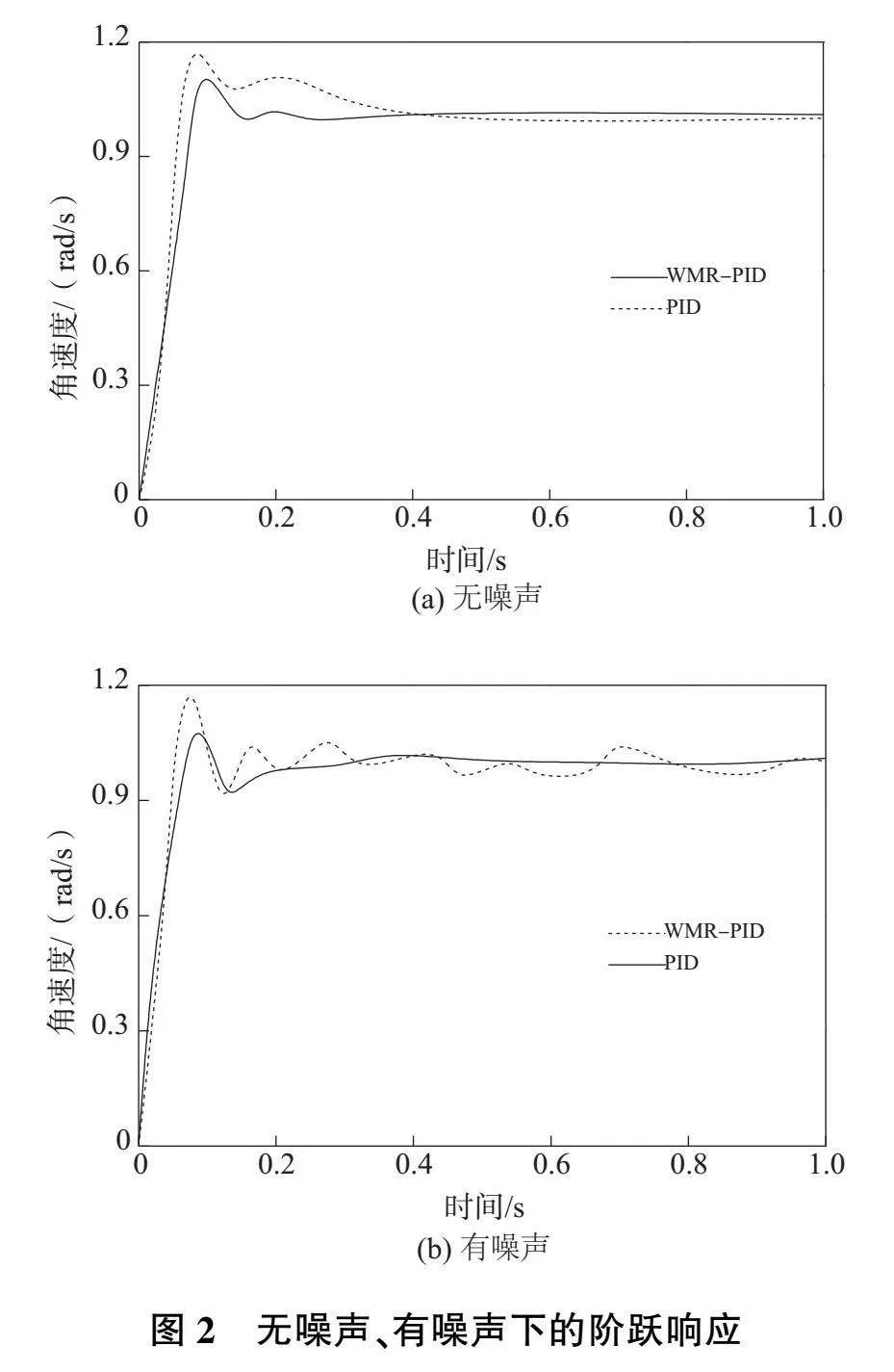
將階躍信號(hào)數(shù)據(jù)輸入后測(cè)試,并與PID控制器對(duì)比,從而確定噪聲在各控制參數(shù)下引起電機(jī)轉(zhuǎn)速變化,結(jié)果如圖2所示。由圖2可以發(fā)現(xiàn),存在白噪聲影響情況下,以傳統(tǒng)PID方式進(jìn)行控制時(shí)會(huì)出現(xiàn)輸出轉(zhuǎn)速的大幅波動(dòng),以WMR-PID方式進(jìn)行控制時(shí)則獲得了穩(wěn)定輸出轉(zhuǎn)速。這是由于當(dāng)WMR-PID高頻參數(shù)在0情況下能夠使輸入信號(hào)高頻噪聲被有效去除。相對(duì)傳統(tǒng)PID控制方法,WMR-PID算法對(duì)于高頻噪聲表現(xiàn)出了更強(qiáng)抗噪能力。
2"模糊WMR-PID控制器設(shè)計(jì)
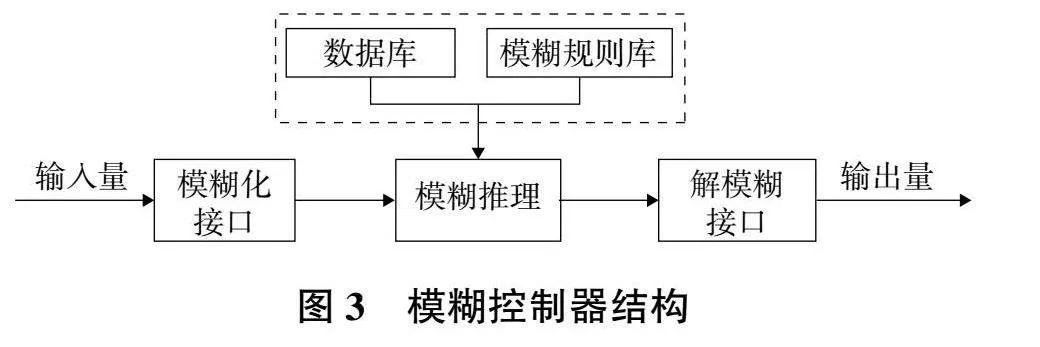
WMR-PID控制器能夠?qū)Ω哳l噪聲起到良好濾除效果,也可通過提高高低頻分量系數(shù)的方式來獲得更優(yōu)魯棒性能。設(shè)置kd1、kd2、kc2參數(shù)時(shí)則應(yīng)根據(jù)系統(tǒng)的實(shí)際運(yùn)行參數(shù)和誤差數(shù)據(jù)來調(diào)節(jié),可采用模糊自適應(yīng)算法對(duì)參數(shù)開展調(diào)節(jié),獲得最優(yōu)控制性能[12]。組成模糊控制系統(tǒng)的各部依次為模糊推理機(jī)制、模糊化接口、規(guī)則庫,具體組成結(jié)果如圖3所示。
輸入項(xiàng)中存在速度偏差u和變化率u0,輸出項(xiàng)由kd1、kd2、kc2構(gòu)成,按照模糊控制模式對(duì)WMR-PID參數(shù)進(jìn)行優(yōu)化后建立模糊WMR-PID調(diào)節(jié)系統(tǒng)。之后根據(jù)輸入語言速度差、變化率和輸出語言變量確定三角形隸屬函數(shù)。
經(jīng)過仿真和實(shí)驗(yàn)推理后完成控制策略的加工過程,利用輸入、輸出變量,從而確定各個(gè)u和u0條件下的kd1、kd2、kc2模糊自整定規(guī)則。
1)當(dāng)BLDCM啟動(dòng)或停止時(shí),會(huì)造成轉(zhuǎn)速偏差增加,為了促進(jìn)響應(yīng)速率的快速提高,將kc2設(shè)定在較大值;為避免轉(zhuǎn)速在初始階段偏差快速增大超出實(shí)際允許界限,需將kd1設(shè)定在合適的值;最后保持kd2=0,確保轉(zhuǎn)速不會(huì)出現(xiàn)大幅超調(diào)的問題。
2)BLDCM在正常運(yùn)轉(zhuǎn)狀態(tài)下只產(chǎn)生很小轉(zhuǎn)速偏差,因此將kc2設(shè)定在較小值,實(shí)現(xiàn)超調(diào)幅度的有效控制;當(dāng)kd1較小時(shí),系統(tǒng)獲得了更大響應(yīng)速率,kd2也達(dá)到較小的取值。
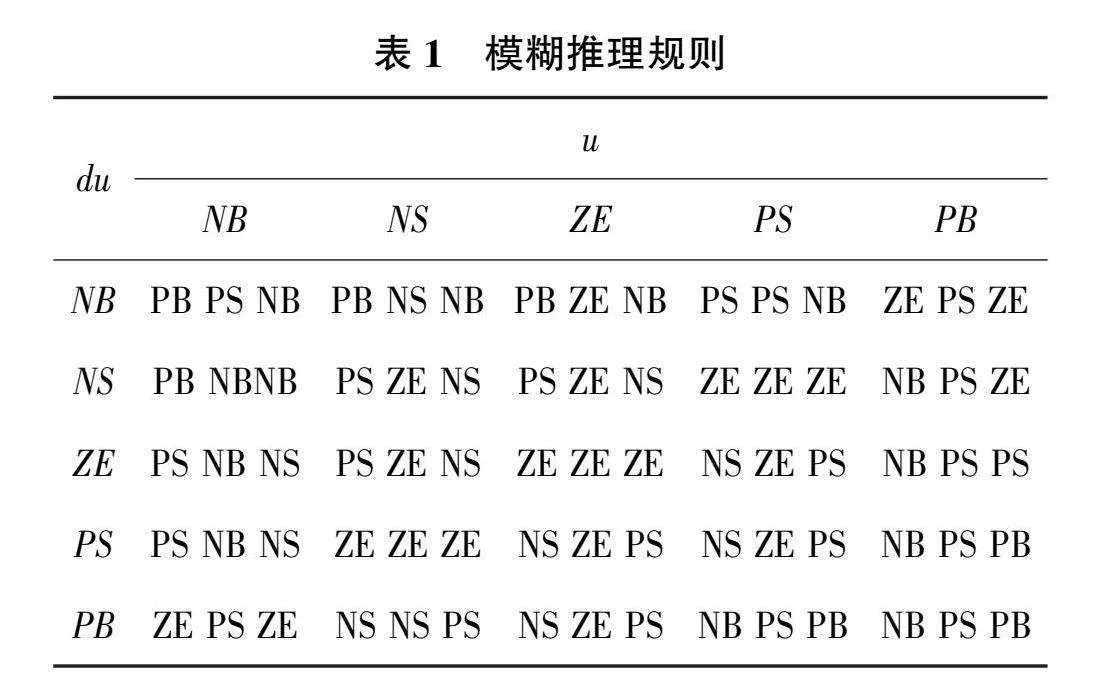
3)當(dāng)BLDCM保持恒定的轉(zhuǎn)速時(shí),轉(zhuǎn)速波動(dòng)很小,此時(shí)為了對(duì)系統(tǒng)進(jìn)行穩(wěn)定控制,應(yīng)適當(dāng)提高kc2和kd2取值。同時(shí)為了保證系統(tǒng)獲得優(yōu)異抗干擾能力,將kd1取值設(shè)置為0。結(jié)合以上研究結(jié)果得到如表1所示的模糊推理規(guī)則。
采用模糊推理的方式確定輸出變量,接著根據(jù)重心分析法解模糊處理,表達(dá)式如下:
vτ=∫navμc(v)dv∫naμc(v)dv,"R=a,b(3)
式中:vτ是模糊集C隸屬度函數(shù)μc(v)的重心。
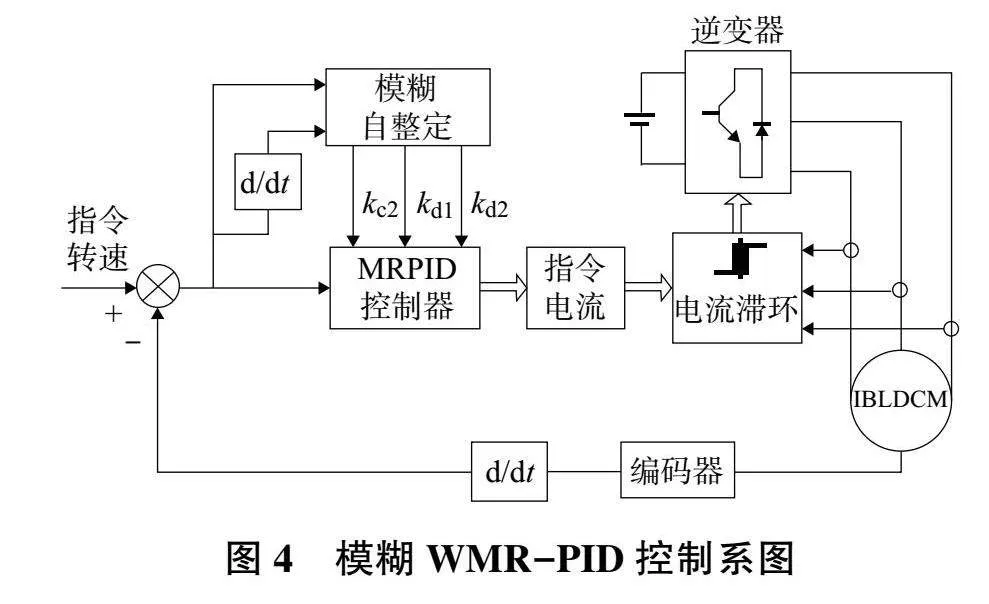
建立模糊WMR-PID控制模型如圖4所示。這是利用BLDCM轉(zhuǎn)速控制的過程實(shí)現(xiàn)控制功能的系統(tǒng)結(jié)構(gòu)圖。以指令轉(zhuǎn)速與轉(zhuǎn)速差值作為輸入?yún)?shù),同時(shí)利用轉(zhuǎn)速偏差u和變化率u0計(jì)算WMR-PID參數(shù)kd1、kd2、kc2,從而得到指令轉(zhuǎn)矩。
3"實(shí)驗(yàn)分析
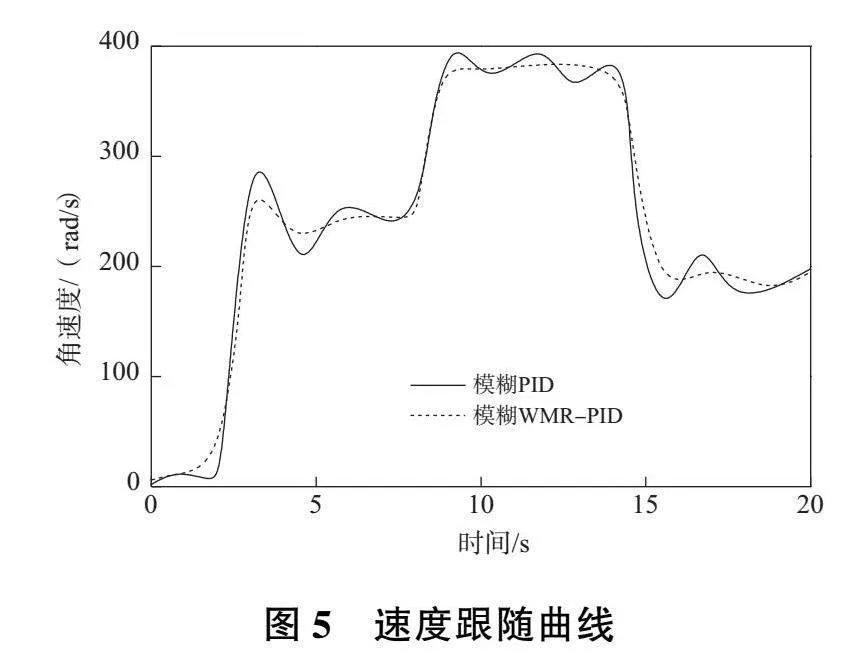
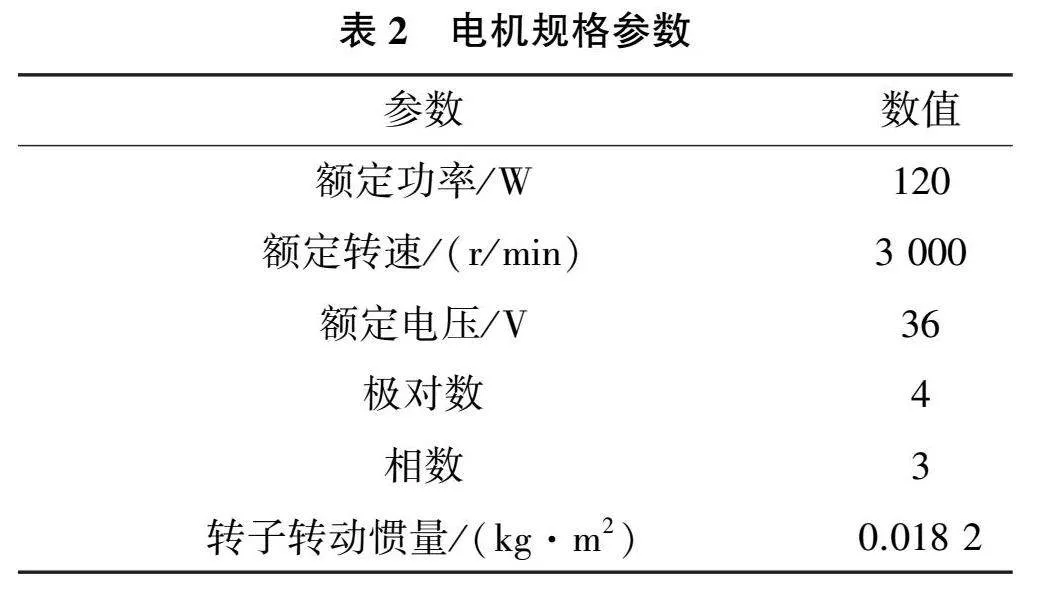
為評(píng)價(jià)模糊WMR-PID控制器對(duì)BLD-CM轉(zhuǎn)速的調(diào)控效果,以模糊WMR-PID方法設(shè)定速度環(huán)。表2給出了電機(jī)的各項(xiàng)性能參數(shù),在模糊WMR-PID控制器中設(shè)定初始分量參數(shù)分別為3.5、1.1、0。
遇到指令速度突變時(shí),形成了如圖5所示的速度跟隨曲線。測(cè)試發(fā)現(xiàn),當(dāng)初始指令速度在2 450r/min的條件下,指令在8s時(shí)迅速增大至3 540r/min,14s時(shí)又迅速降低至1 930r/min。說明模糊WMR-PID控制方式可以實(shí)現(xiàn)快速跟隨的要求。
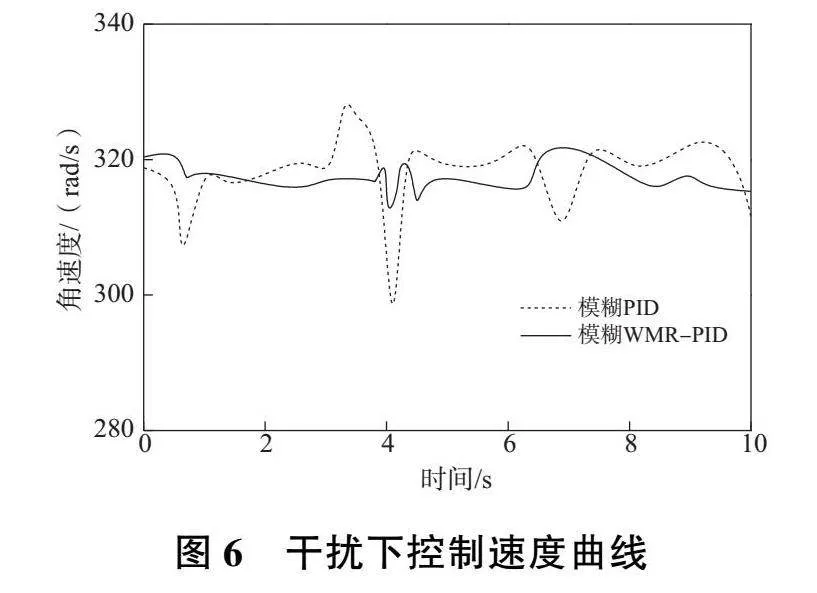
圖6是對(duì)電機(jī)轉(zhuǎn)速在時(shí)變復(fù)合信號(hào)下進(jìn)行轉(zhuǎn)速測(cè)試的結(jié)果。通過測(cè)試分析可以確定,模糊WMR-PID和模糊PID方法都能對(duì)時(shí)變復(fù)合信號(hào)起到理想跟蹤效果。選擇模糊WMR-PID方法處理的時(shí)候能夠大幅降低控制動(dòng)態(tài)的超調(diào)量,說明模糊WMR-PID控制器可以實(shí)現(xiàn)理想的控制效果,并達(dá)到優(yōu)異魯棒性。
4"結(jié)語
1)采用模糊推理的方式確定輸出變量,根據(jù)重心分析法解模糊處理,并建立了模糊WMR-PID控制模型。
2)模糊WMR-PID控制方式可以實(shí)現(xiàn)快速跟隨要求,當(dāng)初始指令速度為2 450r/min時(shí),指令在8s時(shí)迅速增大至3 540r/min,14s時(shí)又迅速降低至1 930r/min。
3)相對(duì)模糊PID方法,模糊WMR-PID能夠大幅降低控制動(dòng)態(tài)的超調(diào)量,說明模糊WMR-PID控制器可以實(shí)現(xiàn)理想控制,并達(dá)到優(yōu)異魯棒性。
參考文獻(xiàn):
[1] 徐鵬,曾俊杰,張偉. 直流無刷電機(jī)的改進(jìn)型滑模控制[J]. 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2021(11):182-188.
[2] 任志斌,周運(yùn)逸,朱杰,等. 基于無刷直流電機(jī)的無位""置傳感器控制[J]. 傳感器與微系統(tǒng),2021,40(11):100-102,107.
[3] 呂中正,張?zhí)m紅,曹克強(qiáng). 電動(dòng)汽車增程器用無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)與研究[J]. 電子器件,2021,44(5):1149-1154.
[4] 劉樂平,袁林中,曾昭韋,等. 自旋飛行器IMU隔離的裝置設(shè)計(jì)及其解旋性能[J]. 機(jī)械設(shè)計(jì)與研究,2021,37(5):197-202.
[5] 張淑芳,宋香明,朱彬華. 結(jié)合改進(jìn)PSO-BP神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)控制[J]. 南開大學(xué)學(xué)報(bào)(自然科學(xué)版),2021,54(4):62-67.
[6] 劉雨豪,廖平. 基于MFO算法的無刷直流電機(jī)模糊控制設(shè)計(jì)[J]. 儀表技術(shù)與傳感器,2021(4):107-111.
[7] KHAN M A,RAHMAN M A. A new wavelet-based speed controller for induction motor drives[J]. Electric Power Components and Systems,2008,36(12):1282-1298.
[8] KHAN M A S K,RAHMAN M A. A novel neuro-wavelet-based self-tuned wavelet controller for IPM motor drives[J]. IEEE Transactions on Industry Applications,2010,46(3):1194-1203.
[9] 唐偉,王立忠,莊健,等. 無刷直流電機(jī)的模糊自整定MRPID轉(zhuǎn)速控制方法研究[J]. 中國機(jī)械工程,2021,32(15):1786-1792,1800.
[10] 張瑞成,趙銘. 模糊PID軋機(jī)單輥傳動(dòng)系統(tǒng)負(fù)荷平衡控制的研究[J]. 機(jī)械設(shè)計(jì)與制造,2022,371(1):37-41.
[11] 王婷婷,胡黃水,趙宏偉,等. 無刷直流電機(jī)轉(zhuǎn)速智能混合控制器設(shè)計(jì)[J]. 吉林大學(xué)學(xué)報(bào)(理學(xué)版),2020,58(3):659-665.
[12] 劉晉霞,王莉,劉宗鋒. 四驅(qū)電動(dòng)輪汽車模糊邏輯控制的再生制動(dòng)系統(tǒng)[J]. 機(jī)械設(shè)計(jì)與制造,2021,370(12):164-168.
收稿日期:20220812
