GNSS+1588v2高精度時間同步技術實現
2024-09-12 00:00:00王瀟禾李雪梅廖麒
現代電子技術 2024年5期

摘" 要: 5G高精度時間同步是作為5G基站建設的重要要求之一,但隨著5G室內基站數量呈現幾何級數增長,使用GNSS授時同步時鐘勢必會存在很多限制,比如容易受場地環境的影響無法獲取衛星信號、GNSS 接收機的成本突增,所以使用GNSS時鐘同步技術不適合5G基站的大規模部署。文中提出一種基于OCTEON Fusion平臺的GNSS+1588v2時間同步技術實現方案,其特點在于使用層次式同步,通過GNSS給一個時鐘系統同步授時,被授時的時鐘系統作為主時鐘系統通過1588v2地面鏈路給下一級時鐘系統授時,實現一個GNSS給多個基站同步授時。文中對現有的GNSS時鐘同步授時進行分析,在此基礎上提出一種基于OCTEON Fusion平臺的GNSS+1588v2時間同步方案,在對此方案的同步精度和同步穩定性的測試中,時鐘同步精度達到10 ns左右,同步穩定性達到10 ns以內。
關鍵詞: 5G; 1588v2; GNSS; 時間同步; 同步精度; 同步穩定性
中圖分類號: TN91?34" " " " " " " " " " " " " " " 文獻標識碼: A" " " " " " " " " " " 文章編號: 1004?373X(2024)05?0042?04
Implementation of GNSS+1588v2 high?precision time synchronization technology
WANG Xiaohe, LI Xuemei, LIAO Qi
(School of Mechanical and Electrical Engineering, Chengdu University of Technology, Chengdu 610059, China)
Abstract: 5G high?precision time synchronization is one of the important requirements for the construction of 5G base stations. However, with the exponential growth of the quantity of 5G indoor base stations, there are bound to be many limitations in using GNSS (global navigation satellite system) to time synchronous clocks, for example, being susceptible to the site environment and far from obtaining satellite signals, surge of GNSS receiver cost. Therefore, the use of GNSS clock synchronization technology is not suitable for large?scale deployment of 5G base stations. In view of this, a GNSS+1588v2 time synchronization technology implementation scheme based on the OCTEON Fusion platform is proposed. The scheme is characterized by synchronously timing a clock system by GNSS in manner of hierarchical synchronization. The clocked clock system is used as the main clock system to time the next clock system by the 1588v2 terrestrial link, so that a GNSS can synchronously time a plurality of base stations. In this paper, the existing GNSS clock synchronization timing is analyzed, based on which a GNSS+1588v2 time synchronization scheme on the basis of OCTEON Fusion platform is proposed. In the synchronization accuracy and synchronization stability test, the clock synchronization accuracy of the proposed scheme reaches about 10 ns, and its synchronization stability is kept within 10 ns.
Keywords: 5G; 1588v2; GNSS; time synchronization; synchronization accuracy; synchronization stability
0" 引" 言
目前國內電信運營商主要采用的時間同步技術是GNSS衛星授時同步技術[1]。這種方法主要是在各個基站上部署GNSS信號接收器,從而獲得高精度的時間基準源用于同步各個基站內的時間,實現各個基站的時間同步[2]。然而隨著5G部署數量的增大,室內基站也呈現幾何數量的增長,勢必會存在衛星信號覆蓋盲區[3]。此外,GNSS信號接收器的安裝和維護成本相對較高,不利于5G基站的大規模部署。
基于1588v2的本地高精度時間同步網絡[4?5],通過網絡中的時間鏈路傳遞承載設備配置1588v2功能,使得網絡中間邊界時鐘節點的一個端口作為從時鐘,與上級時鐘保持同步,其他端口則作為下一級時鐘系統的主時鐘,生成新的1588v2報文向下游傳遞[6]。通過該方式將時鐘源時間基準信號逐點傳遞至5G基站設備。
因此,將基站GNSS信號接收機規劃到一定的數量范圍,再結合通過在1588v2地面傳輸網實現高精度時間同步信號的傳輸技術[7],是一種既經濟可行又可保證通信網實現高精度時間同步的方法。
1" 系統總體設計
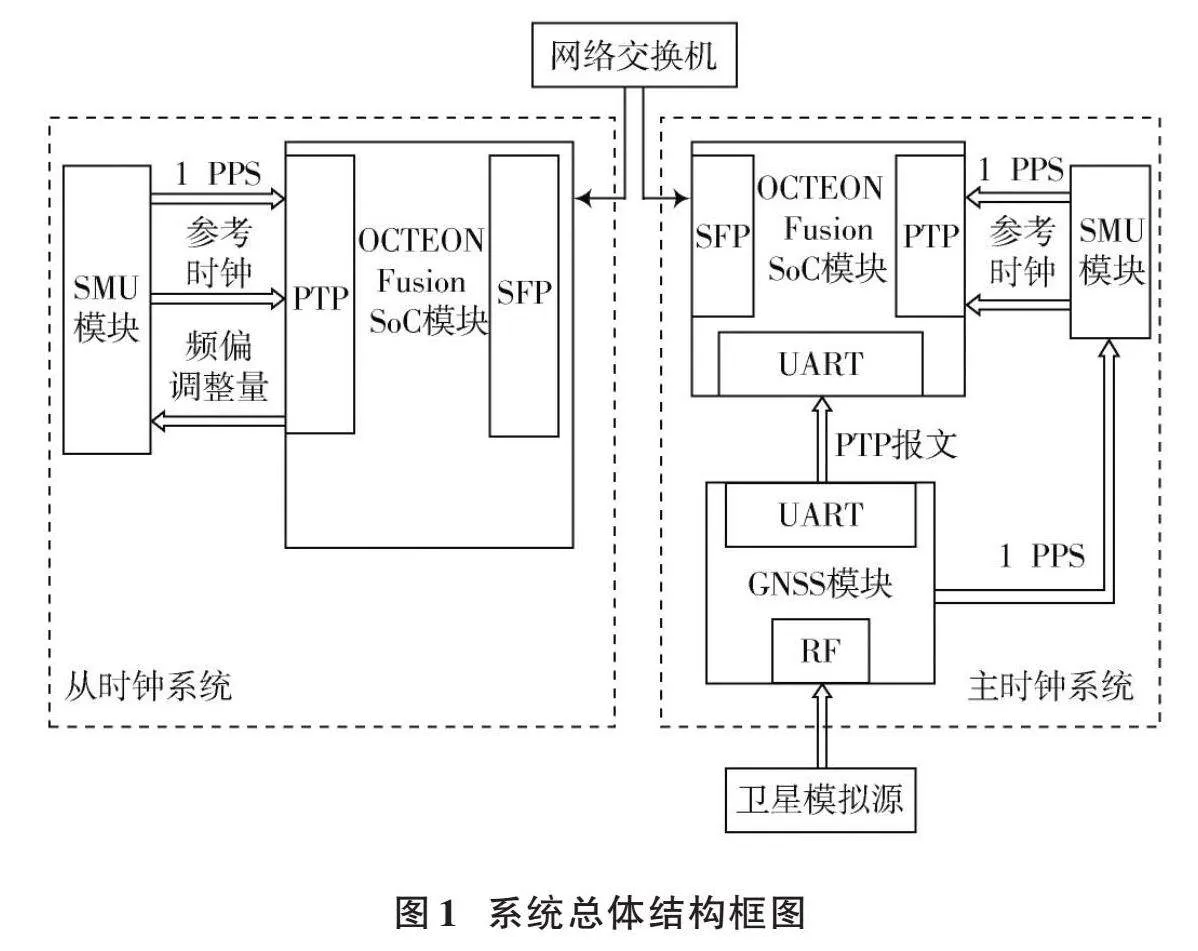
本文設計的同步系統由主從時鐘系統組成,主從時鐘系統結構差異主要體現在從時鐘系統沒有GNSS模塊,所以下面只對主時鐘系統進行闡述。系統主要包含三大模塊:OCTEON Fusion SoC模塊、SMU模塊、GNSS模塊。OCTEON Fusion SoC模塊主要實現1588v2報文的收發、鏈路延遲和偏移量及頻率偏移量的計算、補償調整同步時間;SMU模塊主要實現鎖定GNSS模塊輸出的1 PPS,提供實現1588v2功能所需的1 PPS和參考時鐘;GNSS模塊主要接收衛星模擬源所發射的信號,并解析出NMEA報文傳輸到OCTEON Fusion SoC。系統總體框圖如圖1所示。
2" 1588v2同步原理
主從時鐘系統周期性地通過連續交換報文發送與接收時刻的時間戳,基于鏈路對稱性[8],從時鐘通過同步算法計算偏移量并進行時間調整,以實現與主時鐘系統同步[9?10]。
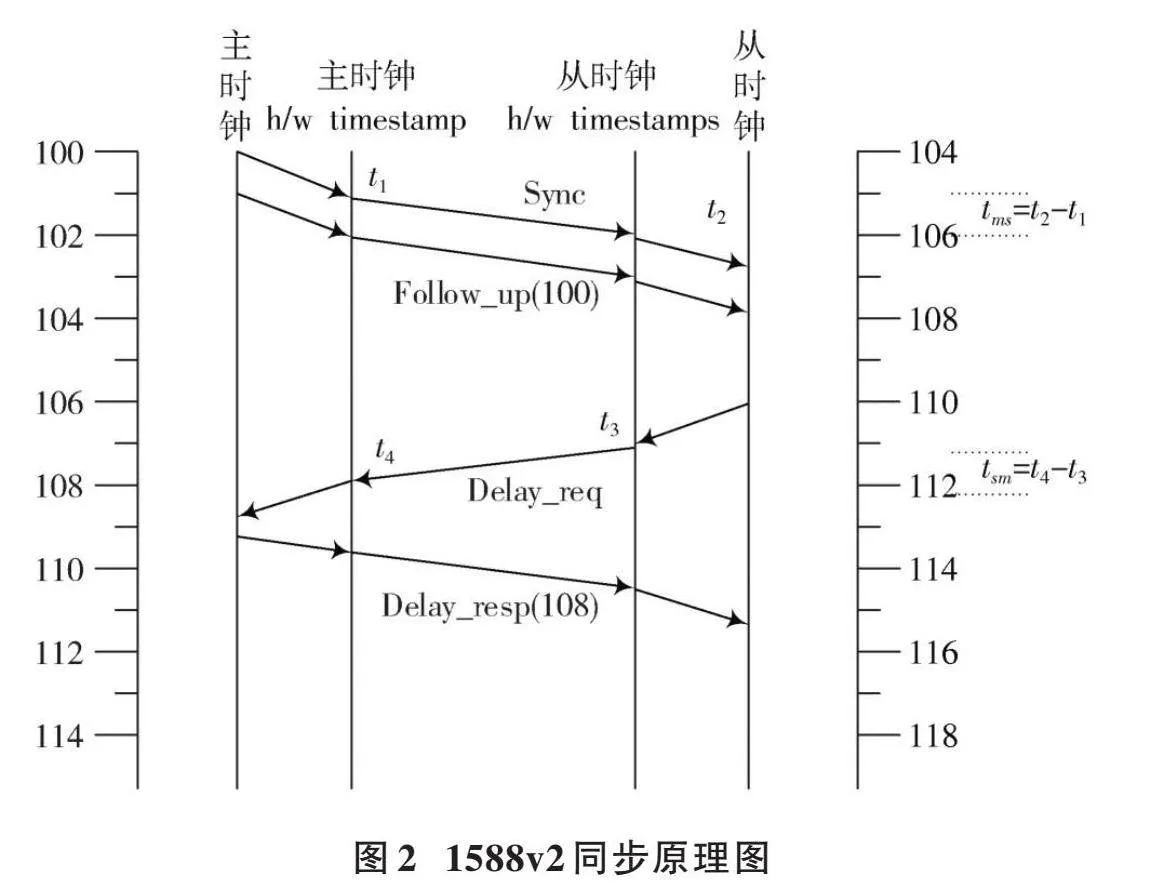
本文采用E2E延時機制[11],在two_step模式下[12],主時鐘發送Sync報文[13],記錄Sync報文離開的時刻[t1] timestamp,隨后主時鐘將[t1] timestamp填充到Follow_up報文里,發送到從時鐘側;從時鐘側接收到Sync報文,記錄Sync報文到達從時鐘側的時刻[t2] timestamp,接收到Follow_up報文并從中獲取[t1] timestamp;從時鐘然后發送Delay_req報文,記錄Delay_req報文離開從時鐘側的時刻[t3] timestamp。
主時鐘側接收到Delay_req報文,記錄下Delay_req到達時刻[t4] timestamp,隨后主時鐘將[t4] timestamp填充到Delay_resp報文,發送到從時鐘側。從時鐘側收到Delay_resp報文并從中獲取[t4] timestamp,這樣經過前面連續的交換報文過程后,從時鐘側獲取到了[t1]、[t2]、[t3]、[t4]四個timestamp,通過下面的公式可計算出鏈路延遲和偏移量。整個報文交互過程如圖2所示。
由圖2可知,由[t1]、[t2]時間戳可以得到[tms]。
[tms=t2?t1=delay+offset] (1)
式中:delay為鏈路延遲;offset為偏移量。
由[t3]、[t4]時間戳可以得到[tsm]。
[tsm=t4-t3=delay?offset] (2)
聯合式(1)和式(2)可以得offset和delay。
[offset=(tms?tsm)2] (3)
[delay=(tms+tsm)2] (4)
所得到的offset和偏移量經過OCTEON Fusion SoC補償處理后,實現主從系統的時間同步。
3" 主從時鐘系統同步過程
3.1" 主時鐘系統同步過程
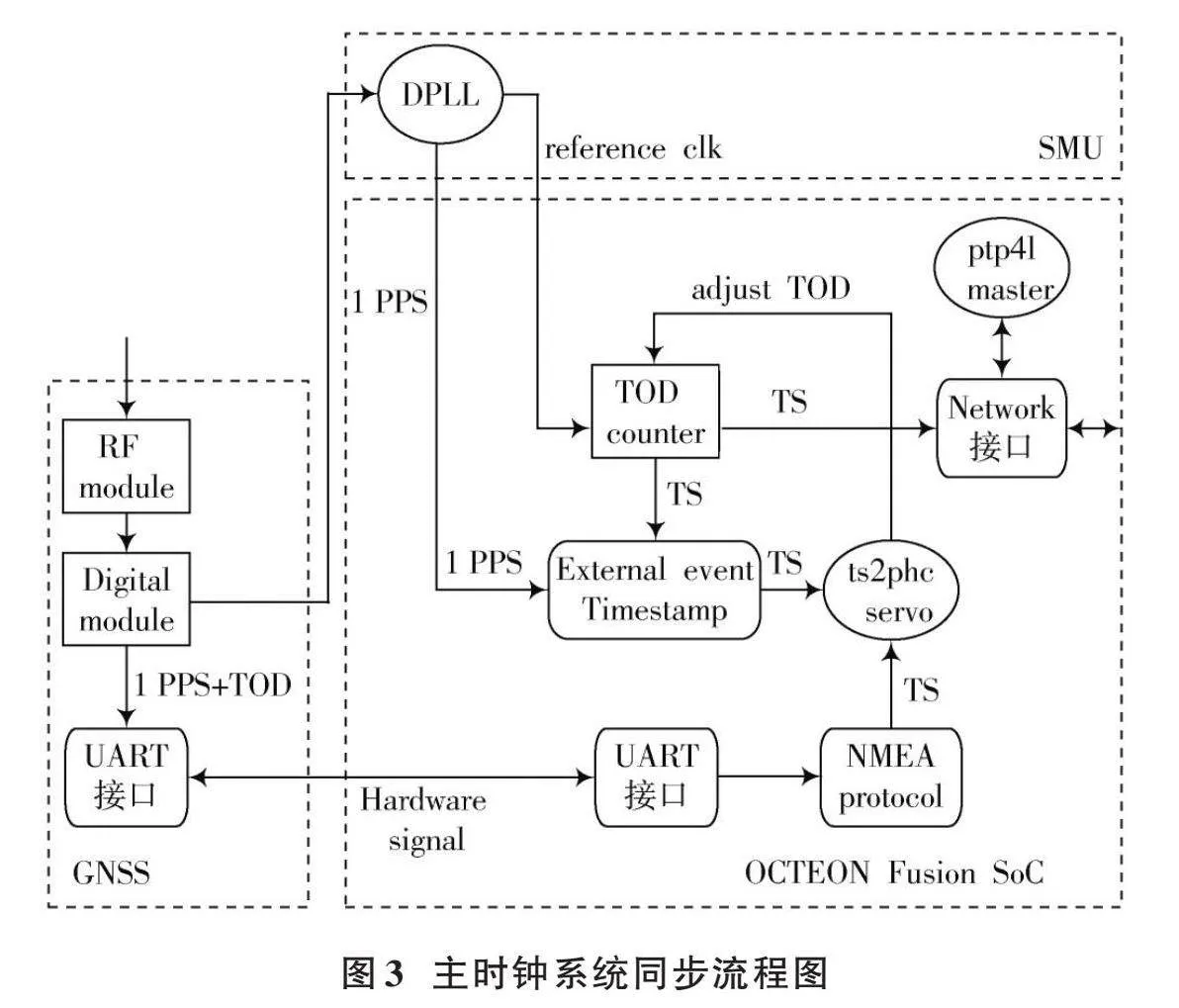
主時鐘系統的GNSS 模塊通過RFmodule接收來自衛星模擬源的信號,經過Digital module處理輸出1 PPS信號和1 PPS+TOD信號。SMU模塊配置一個DPLL通道為鎖相模式,鎖定GNSS模塊輸出的1 PPS信號,輸出參考時鐘驅動OCTEON Fusion SoC內部的PTP功能模塊,輸出的1 PPS信號用于PTP模塊捕獲1 PPS信號邊沿來到時PTP模塊的TOD counter在此時刻的timestamp。ts2phc工具用于維持GNSS輸出的TOD與OCTEON Fusion SoC內部的TOD之間的同步,OCTEON Fusion SoC內部的PTP每檢測到一次DPLL輸出的1 PPS信號邊沿,觸發ts2phc軟件執行一次同步操作,即觸發ts2phc的slave線程取用從UART獲取的NMEA protocol,并解析出GNSS TOD,同時獲取捕獲的1 PPS信號在邊沿時所記錄的timestamp,將兩者用于計算offset,計算出的offset經過servo處理后得到補償調整信息adjust TOD,輸入到OCTEON Fusion SoC的TOD counter,從而實現主時鐘系統與GNSS的同步。
同時,ptp4l master進程通過NetWork接口進行PTP報文同步,給從時鐘系統授時。主時鐘系統同步流程如圖3所示。
3.2" 從時鐘系統同步過程
從時鐘系統與主時鐘系統的同步過程存在幾處差異,主要體現在從時鐘系統不帶GNSS模塊,SMU模塊配置TOD counter, OCTEON Fusion SoC工作機制不同。
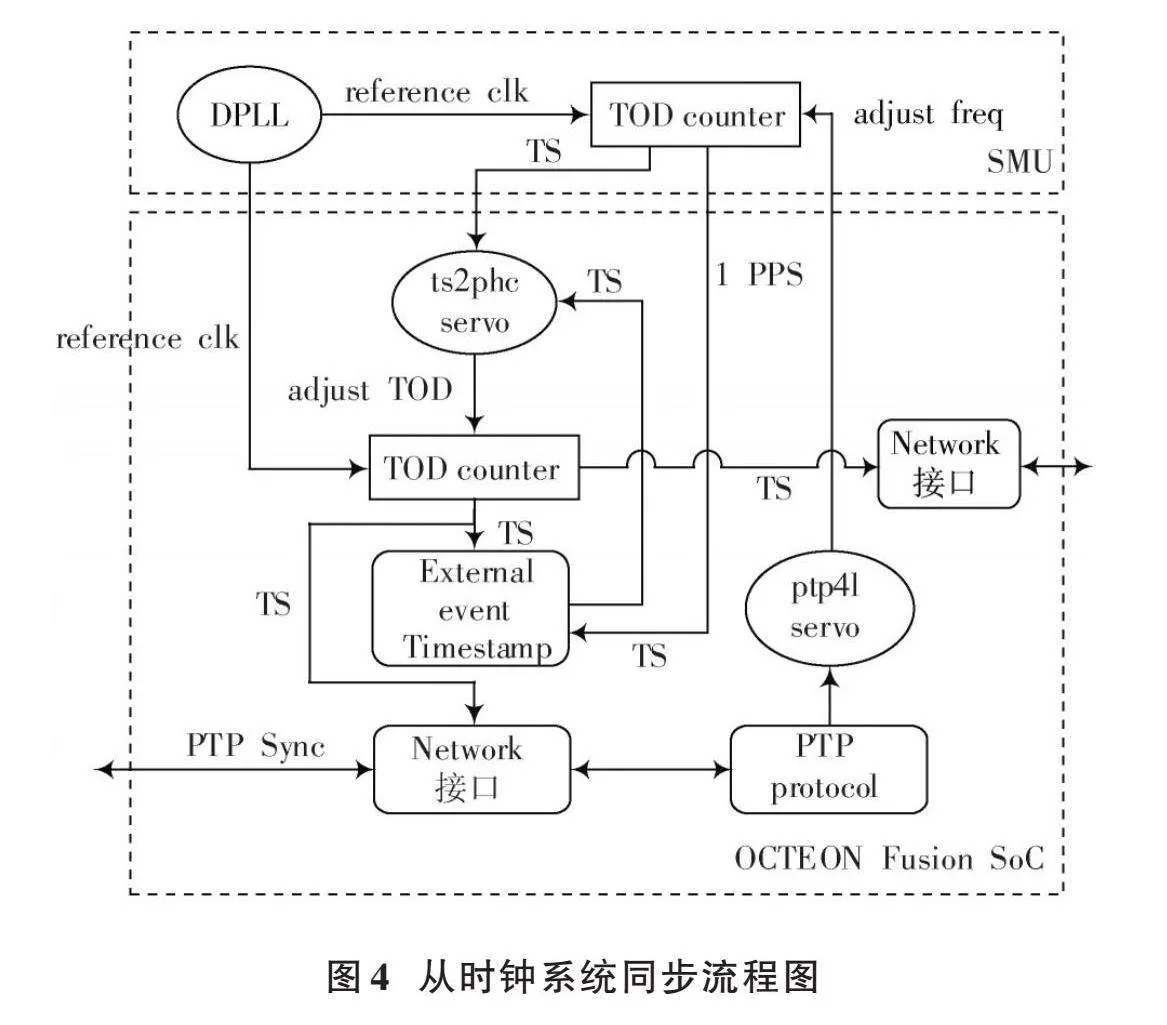
從時鐘系統的DPLL通道配置為DCO模式,輸出的參考時鐘用于驅動OCTEON Fusion SoC的PTP功能。Linux系統加載SMU對應的驅動后生成一個對應TOD counter的設備,SMU的TOD counter輸出的1 PPS信號用于捕獲PTP模塊的TOD counter的timestamp。ts2phc工具用于維持SMU內部的TOD counter與OCTEON Fusion SoC的TOD counter的同步,OCTEON Fusion SoC每檢測到一次1 PPS信號邊沿,觸發ts2phc軟件執行一次同步操作。
從時鐘系統通過Network接口接收來自主時鐘系統的1588v2報文,ptp4l slave進程計算出的offset在經過servo得到頻偏補償調整量作用到SMU的DCO通道,從而實現與主時鐘系統的同步。從時鐘系統同步流程如圖4所示。
4" 測試驗證
本設計通過RIGOL示波器捕獲主從系統的1 PPS信號,來驗證本文設計的1588v2同步精確度。通過日志工具打印來驗證本文設計的1588v2同步穩定性。
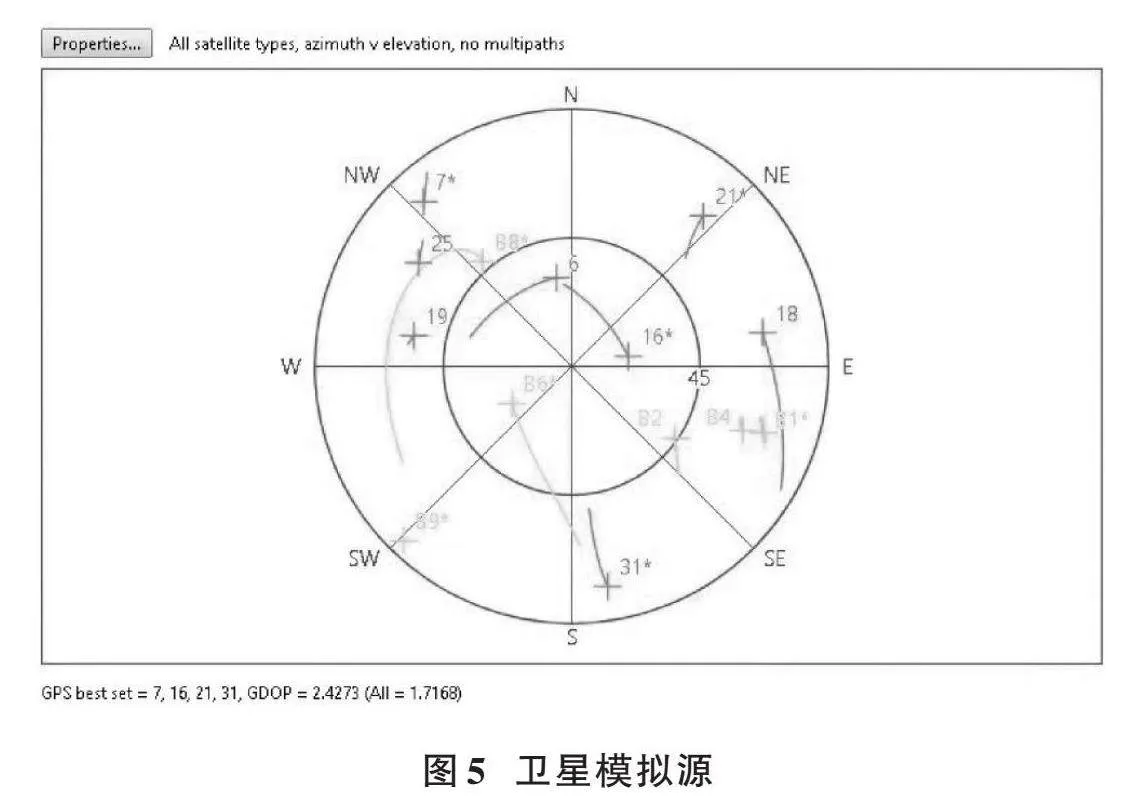
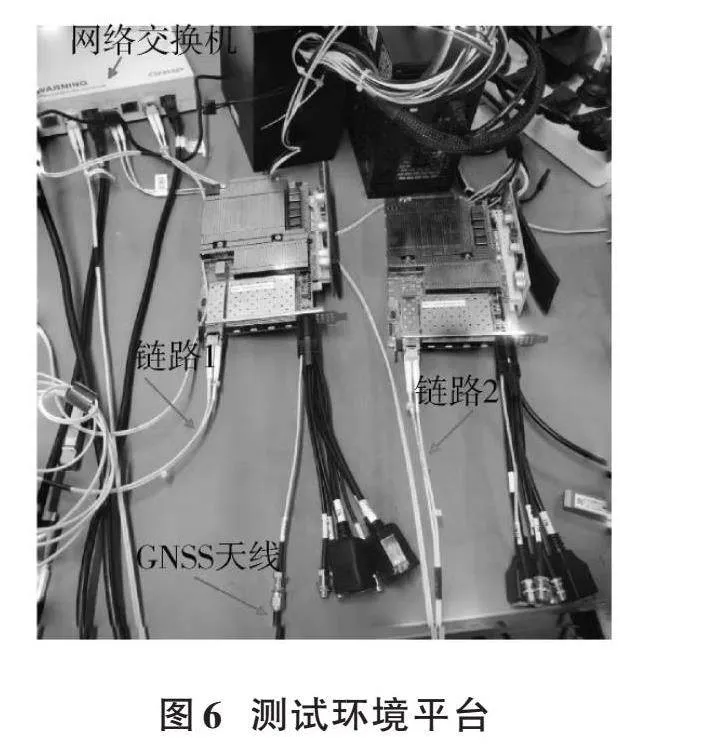
本文設計的主從系統是基于OCTEON Fusion系列芯片的硬件板卡,SMU模塊采用瑞薩的ClockMatrix系列,GNSS模塊采用的是泰斗T系列授時模塊。GNSS星座模擬器使用SpirentGSS7000系列來模擬衛星信號,模擬源發星情況如圖5所示。其測試平臺如圖6所示。從圖6可以看到,主從系統是相互獨立的硬件板卡,主時鐘系統通過GNSS天線接收衛星信號,開始主時鐘系統的同步過程,從時鐘系統通過鏈路2和鏈路1接收主時鐘系統的1588v2報文,開始從時鐘系統的同步過程。
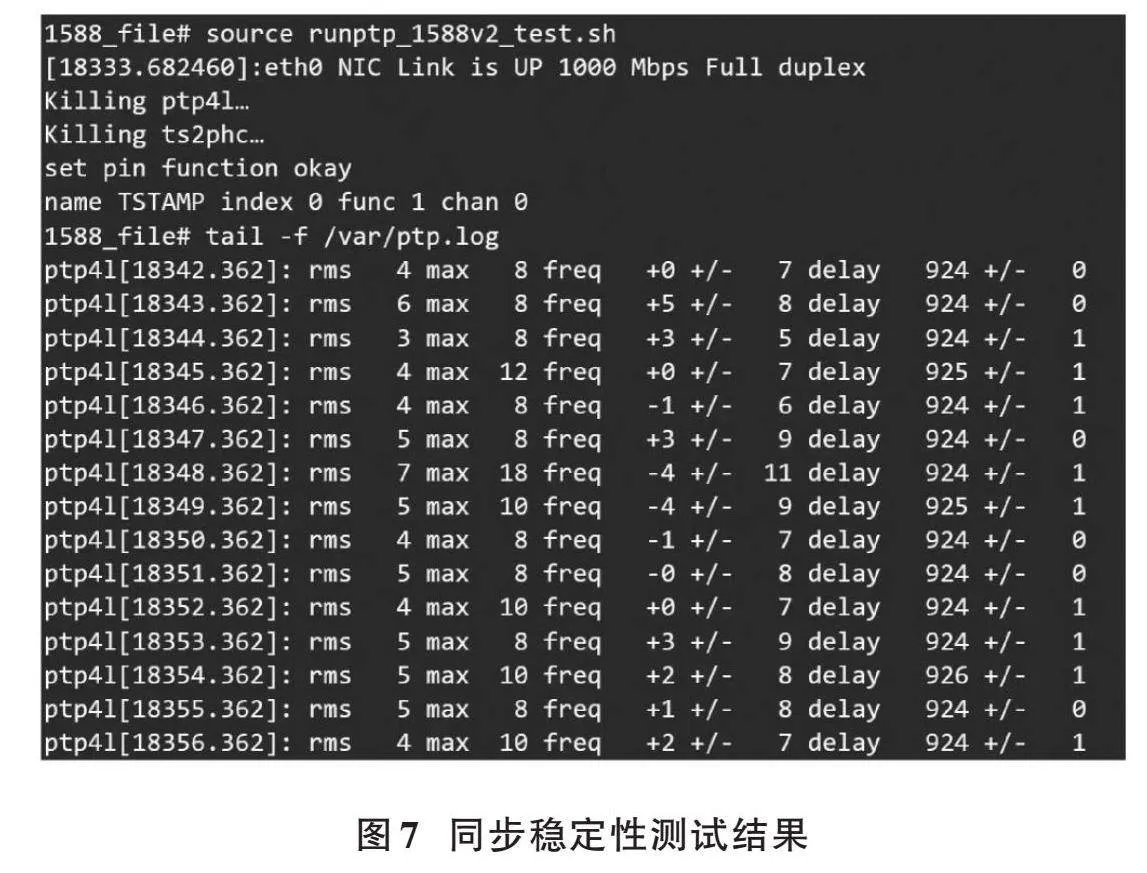
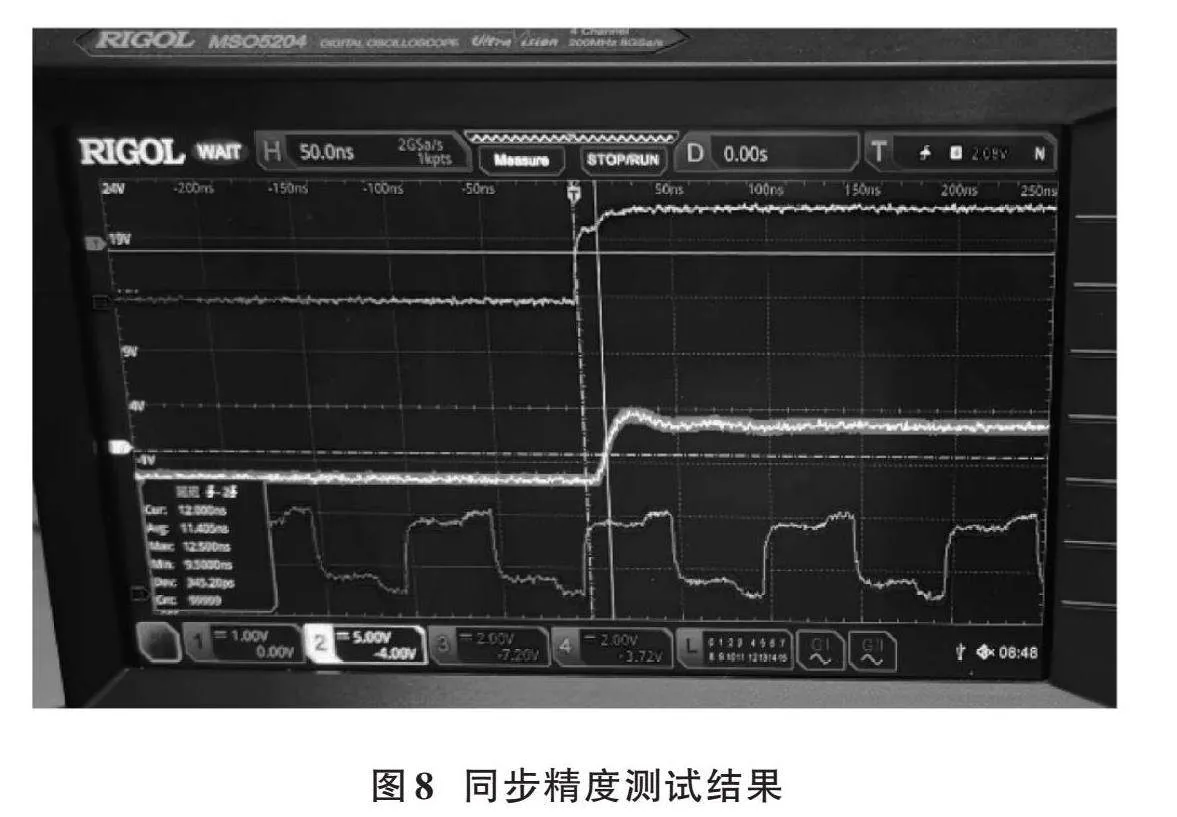
本文設計使用USB?TypeC轉接線來提供示波器測試點和串口調試口。通過從系統的串口登錄進入板卡根目錄后,運行1588v2 slave腳本,待ptplog日志打印顯示rms值,預期結果穩定在30 ns以內,即1588v2同步穩定完成,實際測試結果在10 ns以內,符合預期結果。其測試結果如圖7所示。1588v2同步完成后,主從時鐘系統通過USB?TypeC的OUT?SMA輸出口分別連接至示波器的2通道和4通道,以主時鐘系統輸出作為觸發通道,觀察兩者的相位差。預期結果相位誤差應該在1.5 μs以內,實際相位誤差在10 ns左右,很好地達到預期結果。其測試結果如圖8所示。
5" 結" 語
文中詳細闡述了一種基于OCTEON Fusion平臺的GNSS+1588v2的同步技術實現方案,并且通過示波器和串口調試工具在硬件平臺上驗證了設計的穩定性、時間同步精度要求以及方案的可行性。本文設計達到時間同步精度標準的情況下,實現GNSS一對多的時鐘同步授時,減少了GNSS接收機部署的數量,為5G基站大量部署提供了一種可行方案。本文設計還可以進一步優化,日后會考慮支持1588v2+SyncE、支持GPS和北斗模式隨時切換、支持衛星信號斷開后系統守時24 h等功能。
參考文獻
[1] 包其齊,連世龍.一種基于IEEE 1588v2協議的5G時間同步方案[J].長江信息通信,2023,36(3):182?184.
[2] 趙良,張賀,魏步征,等.基于北斗和1588v2的5G基站時間同步應用探討[J].通信世界,2021(16):35?37.
[3] 黃玉寶,王倫鎖,王廣遠.淺析IEEE 1588v2在通信行業的部署方案及應用[J].數字通信世界,2020(2):9.
[4] 高兆強.基于IEEE 1588v2的無線網絡時間同步技術[J].通信技術,2021,54(1):147?151.
[5] 古方奎,林何平.IEEE 1588v2時間同步網部署方案及應用場景的分析[J].電信工程技術與標準化,2020,33(1):66?70.
[6] 盧建福,程明,蔣清宏.1588v2協議在PTN中的實現[J].光通信技術,2021,45(9):59?62.
[7] 李由由.基于PTP+SyncE的時間同步技術研究與實現[D].北京:中國科學院大學(中國科學院國家授時中心),2021.
[8] 房曉瑜,王京梅,晏子杰,等.基于FPGA的PTP時間同步技術實現[J].電子科技,2019,32(11):43?46.
[9] 賈衛衛.基于IEEE 1588v2協議的LTE小基站時鐘同步系統研究[D].大連:大連交通大學,2020.
[10] 封棟,陳曉.基于PTP的加權時鐘同步算法[J].網絡新媒體技術,2021,10(5):30?36.
[11] 程華,范雯,于佳亮,等.利用PTP技術計算傳輸鏈路頻率偏差的探索[J].電信工程技術與標準化,2022,35(10):88?92.
[12] 陶征亮.基于IEEE 1588協議的高精度時鐘同步技術研究[D].贛州:江西理工大學,2022.
[13] 任昕旸.基于PTP的高精度網絡時間同步系統的研究與優化[D].北京:北京郵電大學,2020.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
