基于音頻數(shù)據(jù)處理的航模電機故障狀態(tài)識別方法
2024-09-18 00:00:00李峻辰王恩成
消費電子 2024年8期
【關鍵詞】電機;聲音信號;故障診斷及分類;經(jīng)驗模態(tài)分解(EMD);MATLAB
引言
在無人機的實際應用場景中,無論是航模比賽還是電網(wǎng)巡線,通常是遠郊機場或偏遠荒野,因此急需一種快速、便攜的電機檢測方法,在無需大量專用設備條件下提供可靠的無損檢測能力。
本項目利用基于EMD分解的特征提取方法和基于深度學習的神經(jīng)網(wǎng)絡分類器,通過電機運轉的聲音,識別故障類型,該方法具有普適性,可以推廣到一般情況。
一、數(shù)據(jù)采集實驗
(一)實驗基本情況
收集航模隊常用電機,在帶槳與不帶槳的兩種情況下,提取滿功率下聲音信號、推力、轉速等數(shù)據(jù),記錄正常電機與損壞電機的數(shù)據(jù)信息,用于后續(xù)聲音特征提取、故障檢測機器學習。
(二)實驗設備
型號為A2212 KV1000的電機12個;尺寸為 6×4E、9×6E的螺旋槳各1個;采樣率為480100Hz的錄音手機1臺;錄像手機2臺(用于分別實時記錄推力、轉速信息);測速儀、遙控器、電池和推力測試實驗臺各1套。
(三)實驗方法
1.數(shù)據(jù)采集
(1)無槳。將電機固定于推力測試試驗臺,音頻記錄手機置于電機正右側30cm,錄像手機1置于推力測試臺正上方60cm處,確保各電子器件連接穩(wěn)定后,使用遙控器將電機功率調至“滿推”狀態(tài),待電壓電流數(shù)據(jù)穩(wěn)定后記錄1min音頻和視頻數(shù)據(jù)。
(2)有槳。將電機固定于推力測試試驗臺,音頻記錄手機置于電機右側30cm,錄像手機1置于推力測試臺正上方60cm處,在電機上安裝6*4E螺旋槳,測速儀置于推力測試臺后方適當位置,確保能夠穩(wěn)定記錄電機轉速,錄像手機2置于測速儀正上方20cm處,確保各電子器件連接穩(wěn)定后,使用遙控器將電機功率調至“滿推”狀態(tài),待電壓電流數(shù)據(jù)穩(wěn)定后記錄1min音頻和視頻數(shù)據(jù)。
2.初步比較
(1)通過觀察、分析聲音、推力數(shù)據(jù),人工篩查12個電機,初步確定正常及有各種類型損壞的電機,記錄相關數(shù)據(jù)。
(2)現(xiàn)有損壞類型有限,人工以特定方式損壞好的電機,重復“1.數(shù)據(jù)采集”,記錄實驗數(shù)據(jù)。
3.電機損壞類型
測試電機線圈破損、轉子松動、有膠、磁鐵錯位、槳不平衡等5種損壞類型。
二、特征提取
航模電機具有轉速快(gt;10000rpm)、結構復雜影響因素多、帶螺旋槳等特點。針對這些特點,我們選擇進行基于EMD分解的時、頻域特征提取[1]。
(一)音頻數(shù)據(jù)處理
實驗測得的音頻是采樣率48000Hz雙聲道.m4a文件,信號頻率最高約為8kHz,滿足采樣率要求。為了便于數(shù)據(jù)處理,將文件無損轉換為.wav格式,采樣率保持不變,并將左右聲道數(shù)據(jù)取平均得到單列數(shù)據(jù)。如此在一定程度上也可以減小噪聲。經(jīng)過測試,使用低通濾波器過濾8kHz以上的噪聲,對于最終結果無明顯影響。因此為了驗證系統(tǒng)的普適性,不額外進行濾波操作。
(二)特征提取
1.轉速及推力預測
推力是電機最重要的性能,但通常利用地面實驗臺的常規(guī)測試方法比較繁瑣[2]。通過音頻信號預測推力可以不拆卸電機,并可用于機載設備。
由于螺旋槳高速旋轉攪動空氣,因此聲音信號中能量最高的是螺旋槳旋轉對應的信號[3]。
基于該特點,功率譜主峰頻率對應螺旋槳轉速,即得:電機轉速(rpm)=60頻率(Hz)槳葉數(shù)量。根據(jù)實驗,轉速的預測值和實際值匹配良好。
得到了轉速之后,可以進一步預測推力。靜推力和轉速并沒有嚴格的計算方法,因為受螺旋槳形狀影響很大,但是一般可以認為是二次函數(shù)關系,系數(shù)通過實驗測定。實際飛行中的動推力和靜推力的關系也可以通過實驗測定。因此只需要將轉速代入公式即可得到推力。
2.音頻特征提取
我們先選取較為常見的時、頻域特征,篩選出適用于航模電機特點的幾個特征,并且刪除了線性相關的相似特征得到以下特征:常見的時域特征有均值、標準差、峰度、偏度、均方根、峰值因子、脈沖因子、裕度因子、峰值等;常見的頻域特征(功率譜特征)有均值、標準差、峰度、偏度、均方根、重心頻率、均方根頻率、頻率標準差等。
但是這些常見的時域特征雖然可以在一定程度上描述音頻信號,但仍不足以充分描述音頻的細節(jié)[4],因此我們采用了經(jīng)驗模態(tài)分解(EMD)。
EMD分解很好地分開了各頻率范圍,我們選取前4個IMF分別提取時、頻域特征,最終得到總計85個特征。經(jīng)過比對測試,倒頻譜、梅爾譜、包絡譜等其他信號處理方法提取特征效果并不好。
(三)特征可視化
因為85個特征無法展示在坐標空間中(最多三維),因此需要進行高維特征的篩選或是降維。
高維特征降維方法中最常用的是主成分分析方法(PCA)[5]。它把給定的一組相關變量通過線性變換轉成另一組不相關的變量,這些新的變量按照方差依次遞減的順序排列。具體流程為:對特征進行歸一化;計算特征數(shù)據(jù)集的相關系數(shù)矩陣;計算相關系數(shù)矩陣的特征值和特征向量;取最大的三個特征值對應的特征向量;將85個特征向這三個特征向量投影得到3個新的特征。待測信號與正常的特征基本重合且與故障類特征顯著分開,因此能夠可靠地判斷待測電機正常。該結果可以與神經(jīng)網(wǎng)絡分類器結果相互印證。
(一)神經(jīng)網(wǎng)絡分類器結構
分類器核心有三個線性層:輸入層、隱藏層和輸出層。以有槳的情況為例,圖中所示輸入85個特征,輸出6個標簽,隱藏層經(jīng)過訓練環(huán)節(jié)的調試,我們選擇85×4=340個神經(jīng)元。為提高模型的非線性擬合能力,我們在隱藏層前加入了ReLU非線性激活單元。此外我們的數(shù)據(jù)量不是很多,訓練過程中容易出現(xiàn)過擬合,我們又在隱藏層后面增加了Dropout層,Dropout層會在訓練時隨機臨時隱藏一部分隱藏層的神經(jīng)元,緩解過擬合現(xiàn)象,而在驗證或測試時,可以在eval模式下終止Dropout層發(fā)揮作用,實現(xiàn)正常的輸出。
考慮到輸入的各類特征在數(shù)值上有很大的差異,我們在數(shù)據(jù)進入模型前進行了歸一化,對每類特征進行Max-Min歸一化,使輸入值范圍均在0~1之間。為了不丟失點間絕對距離的差異,我們將訓練時歸一化使用的max與min的值同模型一起保存,在驗證與測試時一并加載使用。
另外,輸出層的輸出值范圍不一定在0~1之間,我們使用Softmax層將各輸出值轉化為取相應標簽的概率,最終概率最大的標簽輸出值置為1,其他置為0,得到最終的輸出標簽。
(二)損失函數(shù)與優(yōu)化器
結合前面的分析,我們使用多分類任務中常用的交叉熵損失函數(shù)。交叉熵損失函數(shù)可以與Softmax很好地搭配。
我們選擇了帶動量的SGD優(yōu)化器搭配交叉熵損失使用。帶動量的SGD優(yōu)化器在梯度下降中帶有一定的慣性,學習率也可以遞減,能更好地通過局部極小點,并且加快收斂速度,抑制梯度下降時上下震蕩的情況。
(三)訓練與驗證
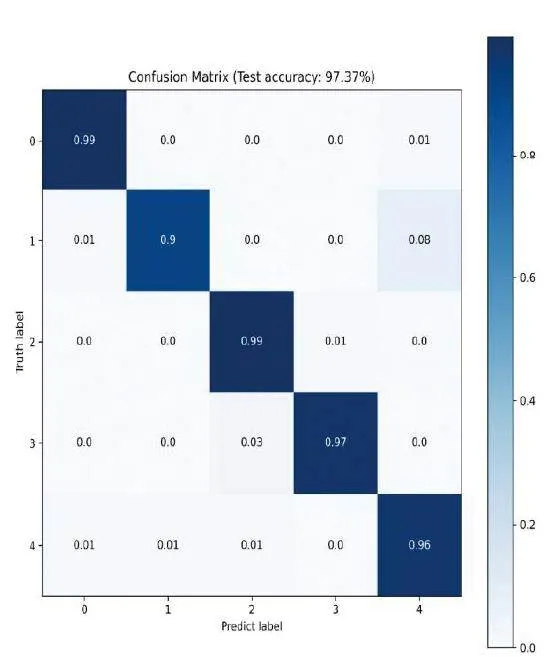
訓練與驗證使用的數(shù)據(jù)來自最初正常無損的電機,以及人為損壞的各類電機。每種故障類型各取20s長的音頻,結合特征提取部分的處理,加0.1s的矩形窗,步長為0.05s,于是總計得到2400(有槳、五故障一正常)或2000(無槳、四故障一正常)個樣本點。而特征數(shù)量為85,則數(shù)據(jù)集大小分別為2400×85、2000×85。為更好地進行全局尋優(yōu),每個epoch(回合)均載入整個數(shù)據(jù)集。
(四)測試
下面我們仔細設計了測試集,用來測試模型的性能。結合前面數(shù)據(jù)采集實驗的結果,我們先對可以用來測試的數(shù)據(jù)進行分類。A類樣本:所收集電機的直接聲音數(shù)據(jù);B類樣本:所收集電機損壞后,剔除訓練部分的其他聲音數(shù)據(jù)。最后,為了反映真實情況,不同于訓練環(huán)節(jié)固定的音頻段長度,測試的獨立音頻段長度在幾秒到幾十秒不等。
測試結果的混淆矩陣如圖1所示。
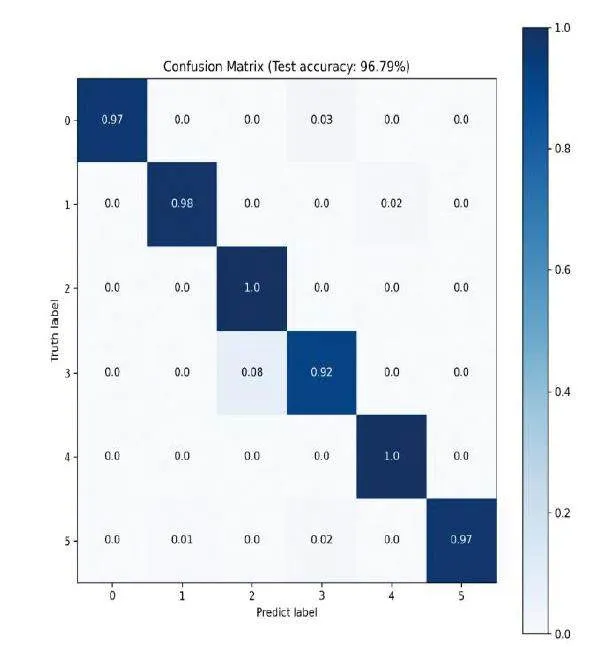
最后我們設計了電機故障診斷(MFD)的MATLABAPP,完成代碼封裝,方便操作實施。實驗中所有有槳的情況均使用6×4E槳,但在固定翼航模等應用中,同一電機可能會使用不同的槳葉來完成多種飛行任務。我們在好的電機上換裝了9×6E的大槳,使用該APP進行測試,故障預測為“正常”的可能性仍高達92.96%,進一步說明了我們的模型有較好的泛化能力,在電機動力特性不發(fā)生顯著變化時,對一般的電機行為均有一定的辨別能力。
總結與展望
針對航模電機故障檢測的任務需求,我們獨立完成了數(shù)據(jù)采集與處理,結合EMD方法融合信號的時頻域特征,一方面進行推力與轉速預測,另一方面將特征載入我們搭建的神經(jīng)網(wǎng)絡故障分類器,預測故障類型;借助主成分分析對特征空間進行可視化,驗證分類器的分類結果,并測試驗證模型性能與泛化能力。最后,設計了MFD電機故障診斷MATLABAPP,提高了程序的實用性。本文研究形成的電機故障檢測方法,在基于聲音信號的電機推力預測、故障信號的時頻域特征融合及可視化方法、有較強泛化能力及可解釋性的神經(jīng)網(wǎng)絡故障分類器等方面具有創(chuàng)新性。相較于傳統(tǒng)的信號處理方法,我們特征分類法準確率更高,泛化能力更強;相較于完全的深度學習處理方法,我們的計算量小,需要的數(shù)據(jù)量少,且具有更強的可解釋性。未來,我們可以進一步分析多電機同時運轉時的聲音信號特征,拓展多發(fā)固定翼、多旋翼無人機的電機故障診斷,并將算法應用于機載嵌入式系統(tǒng),實現(xiàn)電機實時診斷。
參考文獻:
[1] 李海. 基于EMD 和特征融合的電機故障診斷[D]. 浙江: 浙江大學,2013.
[2] 姚遠, 李葉松, 雷力, 等. 基于電機驅動系統(tǒng)自傳感的機械故障診斷研究綜述[J]. 電工技術學報,2022,37(12):2936-2948.
[3] ALTINORS, AYHAN, YOL, FERHAT, YAMAN, ORHAN. A sound based method for fault detection with statistical feature extraction in UAV motors[J]. 2021,183(Dec.):108325.1-108325.14. DOI:10.1016/j.apacoust.2021.108325.
[4] Priscile S ,Tenia M ,Marcel J , et al. Modeling and Fault Detection of Brushless Direct Current Motor by Deep Learning Sensor Data Fusion[J].Sensors,2022,22(9):3516-3516.
[5] 劉立月, 黃兆華, 劉遵雄. 高維數(shù)據(jù)分類中的特征降維研究[J]. 江西師范大學學報( 自然科學版),2012,36(02):131-134.
