新型三定子直流無刷電機的設計與特性分析
2024-09-21 00:00:00向文樂向青青李圳劉志強
現代電子技術 2024年16期





摘" 要: 傳統直流無刷電機齒槽分布受限導致氣隙磁場波動,會造成轉矩輸出波動較大,故需要同步匹配設計復雜的驅動控制系統與控制算法。為此,提出一種新型的三定子直流無刷電機拓撲結構。通過等效磁路法計算出三定子直流無刷電機的主要結構尺寸。設計了三定子直流無刷電機的繞線方式和換向邏輯,驅動控制簡單。基于Ansoft maxwell仿真軟件,建立了電機有限元模型,仿真分析了電機靜態磁場分布、氣隙面域磁密分布和空載反電動勢等。得到了三定子直流無刷電機的轉矩特性:其轉矩峰值可達8.5 N·m;電感特性:其三相繞組間磁場相互解耦,互感為0,自感平均值為4.5 mH;效率與損耗特性:不計機械損耗的情況下電機理想效率可達92%。研制了試驗樣機并進行試驗驗證,有限元分析和試驗結果表明:三定子結構電機磁通密度高,輸出轉矩大,轉矩峰值較單定子電機提升了42%;輸出轉矩波動小,較單定子電機波動降低了30%。在額定轉矩為7.5 N·m的情況下,電機轉速從啟動到500 r/min的響應時間僅為0.8 s;從500~1 000 r/min的響應時間僅為1.5 s;從1 000~1 500 r/min的響應時間僅為2.1 s。
關鍵詞: 三定子直流無刷電機; 等效磁路法; 靜態磁場; 氣隙磁密; 空載反電動勢; 有限元分析
中圖分類號: TN402?34; TM301.4" " " " " " " " " " 文獻標識碼: A" " " " " " " " " 文章編號: 1004?373X(2024)16?0076?09
Design and characteristic analysis of new three?stator DC brushless motor
XIANG Wenle1, XIANG Qingqing2, LI Zhen3, LIU Zhiqiang2
(1. School of International Engineering, Changsha University of Science and Technology, Changsha 410114, China;
2. College of Excellent Engineers, Changsha University of Science and Technology, Changsha 410114, China;
3. College of Automotive and Mechanical Engineering, Changsha University of Science and Technology, Changsha 410114, China)
Abstract: The limited slot distribution in traditional brushless DC motors leads to fluctuations in the air gap magnetic field, resulting in significant torque output fluctuations. It is necessary to design complex drive control systems and control algorithms by synchronous matching. Therefore, a new topology structure of the three?stator DC brushless motor is proposed. Based on the equivalent magnetic circuit method, the main structure size of the three?stator DC brushless motor is calculated. The winding mode and reversing logic of the three?stator DC brushless motor are designed. Based on Ansoft maxwell simulation software, the finite element model of the motor is established, and the simulation analysis of the static magnetic field distribution, magnetic density distribution in the air gap area and no?load back electromotive force of the motor are conducted, so as to obtain the torque characteristics of the three?stator DC brushless motor: the peak torque can reach 8.5 N·m; the inductance characteristics: the magnetic field between the three?phase winding was decoupled, the mutual inductance is 0, and the average self?inductance is 4.5 mH; and the efficiency and loss characteristics: The ideal efficiency of the motor can reach 92% without mechanical loss. The testing prototype is developed and verified. The finite element analysis and testing results show that the three?stator motor has high magnetic flux density, large output torque, and the peak torque is increased by 42% compared with the single?stator motor. The output torque fluctuation is small, which is 30% lower than that of single?stator motor. Under the condition of rated torque 7.5 N·m, the response time of motor speed from start to 500 r/min is 0.8 s, the response time from 500 r/min to 1 000 r/min is 1.5 s, and the response time from 1 000 r/min to 1 500 r/min is 2.1 s.
Keywords: three?stator DC brushless motor; equivalent magnetic circuit method; static magnetic field; air gap magnetic density; empty back electromotive force; finite element analysis
0" 引" 言
直流無刷電機由于結構緊湊、效率高、壽命長、工作穩定、噪聲小等優點,被應用于各行各業的產品中。然而,傳統直流無刷電機因定子結構導致齒槽分布受限,致使三相集中繞組通電后產生的氣隙磁場在空間和時間兩個維度上波動較大;且其三相繞組間存在互感,使繞組電流滯后電壓存在一定電角度,最終導致電機運行時轉矩波動較大。為解決上述問題,國內外學者提出雙凸極、雙定子和混合永磁體的電機結構。文獻[1]分析了不同繞組對雙凸極電機發電性能的影響,單層繞組雙凸極電機的輸出能力更強,而雙層繞組的抗過載能力更強。文獻[2]提出了一種基于矢量控制來抑制雙凸極電機轉矩脈動的方法,這是對于雙凸極電機控制策略方面的研究,在電機結構上無太大的創新。文獻[3?5]從電機永磁體材料組成的角度出發,研究了鐵氧體、釹鐵硼混合永磁體電機。文獻[6?9]采用雙定子(即內、外定子結構)來增強電機的磁通特性,但增加了調磁繞組,使電機繞組的繞線方式更為復雜。
本文提出一種新型三定子的直流無刷電機拓撲結構,該電機結構有別于雙凸極、雙定子、混合永磁體結構的電機,其特殊的定子拓撲結構從理論上可巧妙地解決定子齒槽數量少、跨距大,從而導致齒槽轉矩凸顯、轉矩波動大的問題,且無需專用設計驅動控制器及使用復雜控制算法。
1" 新型三定子直流無刷電機設計
本文所設計的新型三定子直流無刷電機額定功率為1 200 W,額定電壓為48 V,額定電流為20 A。
1.1" 電機結構設計及尺寸計算
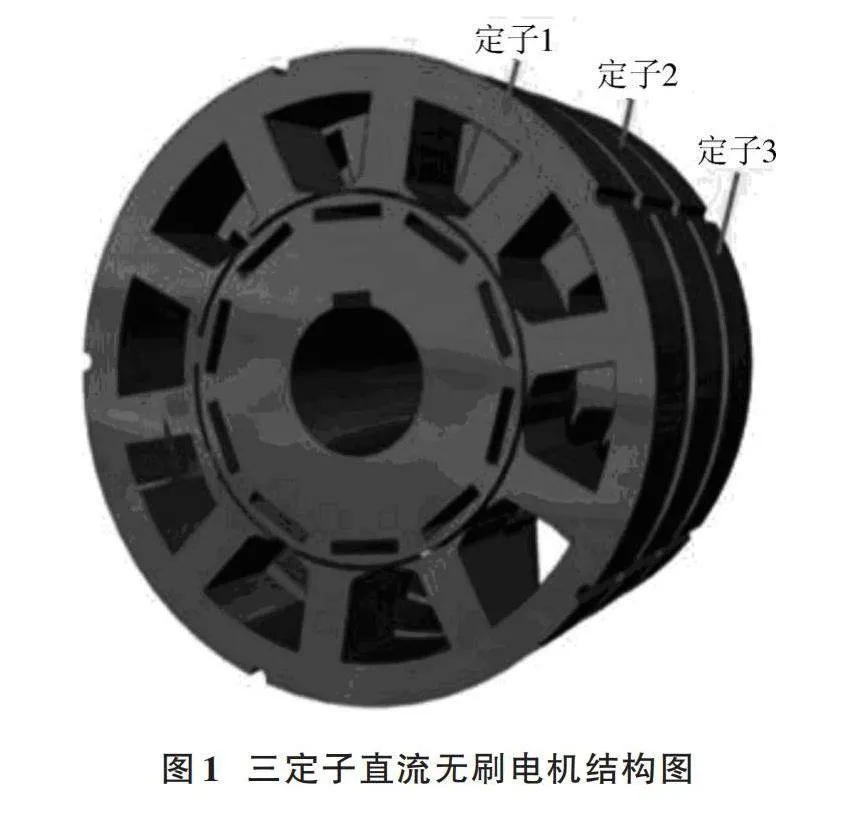
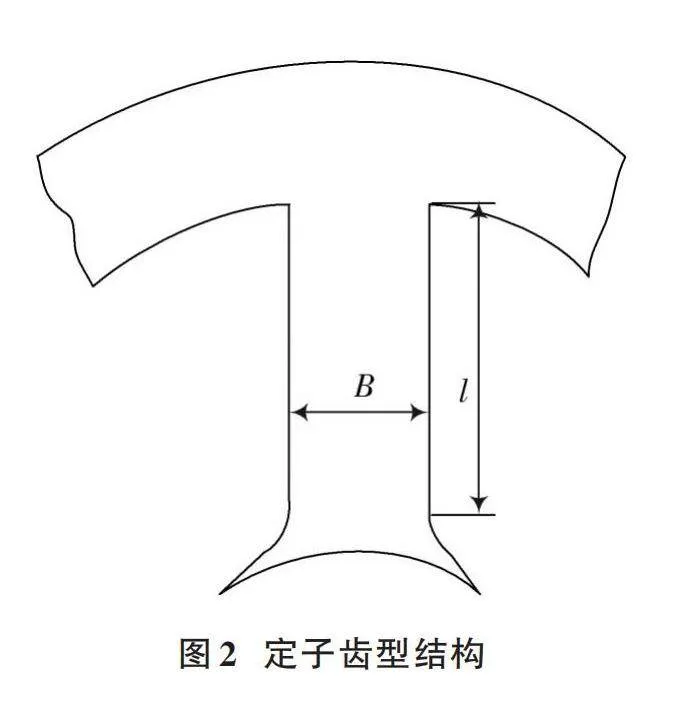
圖1所示為新型三定子直流無刷電機結構,圖2為定子齒型結構。定子1、定子2、定子3均有10個齒槽,每個定子齒槽均勻錯開12°,即120°電角度,三定子間隔10 mm同軸排列,中間安裝隔磁板,每個定子齒槽上繞制一相繞組。
電機主要尺寸計算公式如下:
[D2aLanP'=6.1×106αiKωK?ABδ] (1)
式中:[Da]為定子內徑(單位為mm);[La]為定子鐵心軸向有效長度(單位為mm);[P']為電機計算功率(單位為W);[αi]為定子的極弧系數,一般取0.7~0.9;[Kω]為電機繞組系數,取0.93左右;[K?]為氣隙磁場波形系數,一般取1.1;[A]為電負荷,取10~15 A/mm;[Bδ]為氣隙磁密,一般取0.8~0.9 T。
經計算,定子鐵心內徑[Da]=90 mm,單個定子鐵心軸向有效長度[La]=40 mm。
電樞繞組繞制于定子齒上,繞組設計還受額定電流、線圈匝數、槽滿率、導線的截面積及電流密度等影響。
繞組匝數N計算公式如下:
[N=σ0E02πfpK?Bmτpl] (2)
繞組銅線線徑[d]計算公式如下:
[d=4IJπ] (3)
式中:[σ0]為空載漏磁系數;[E0]為空載感應電勢;[f]為頻率;[p]為極數;[Bm]為永磁體的空載磁通密度;[I]為電機額定電流;J為電流密度。
永磁體的尺寸計算公式如下:
[hm=μrBrBδ-1δi] (4)
[bm=αpτ] (5)
式中:[μr]為相對回復磁導率;[hm]為永磁體磁化方向厚度;[bm]為永磁體寬度;[Br]為永磁體剩磁;[Bδ]為氣隙磁密,[BrBδ]比值一般取1.1~1.35;[δi]為電機的氣隙長度;[τ]為電機的轉子極矩;[αp]為轉子的極弧系數,取0.8。
1.2" 繞組設計及換向邏輯
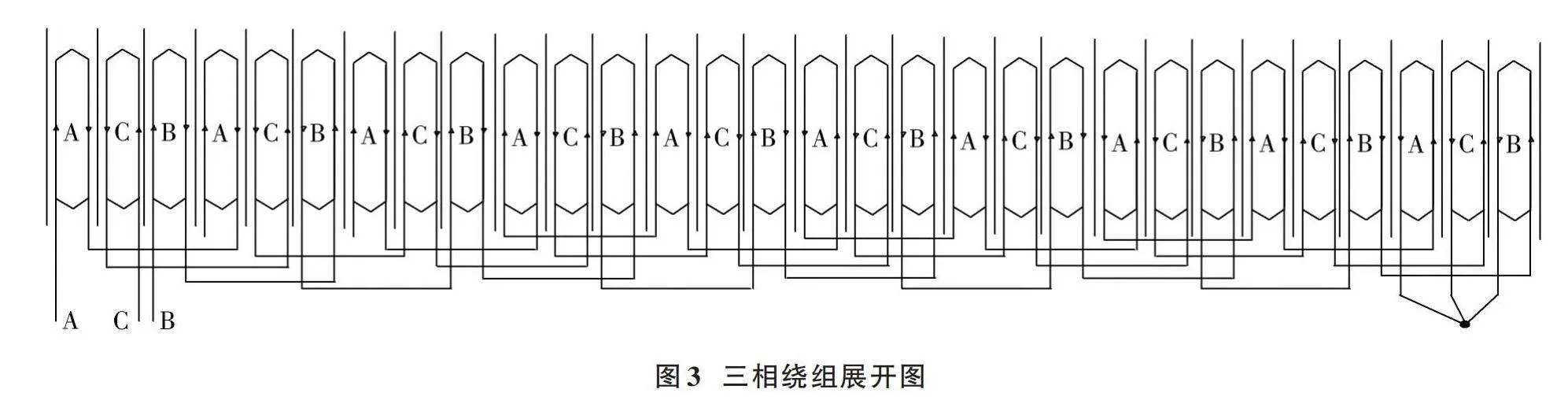
電機采用六步驅動的控制方法,即采用三相Y型繞組連接。根據三相電機驅動方式,后一相繞組的反電動勢滯后于前一相繞組反電動勢120°電角度。由于每個定子10個齒槽等于級數,因此每單獨一定子一齒槽對應永磁體一極。單獨一定子相鄰齒槽串聯繞制相反方向的一相繞組。圖3所示為三相繞組展開圖,A、C、B三相繞組分別繞制在第一個、第二個、第三個定子上,且相鄰線圈繞線方向相反。
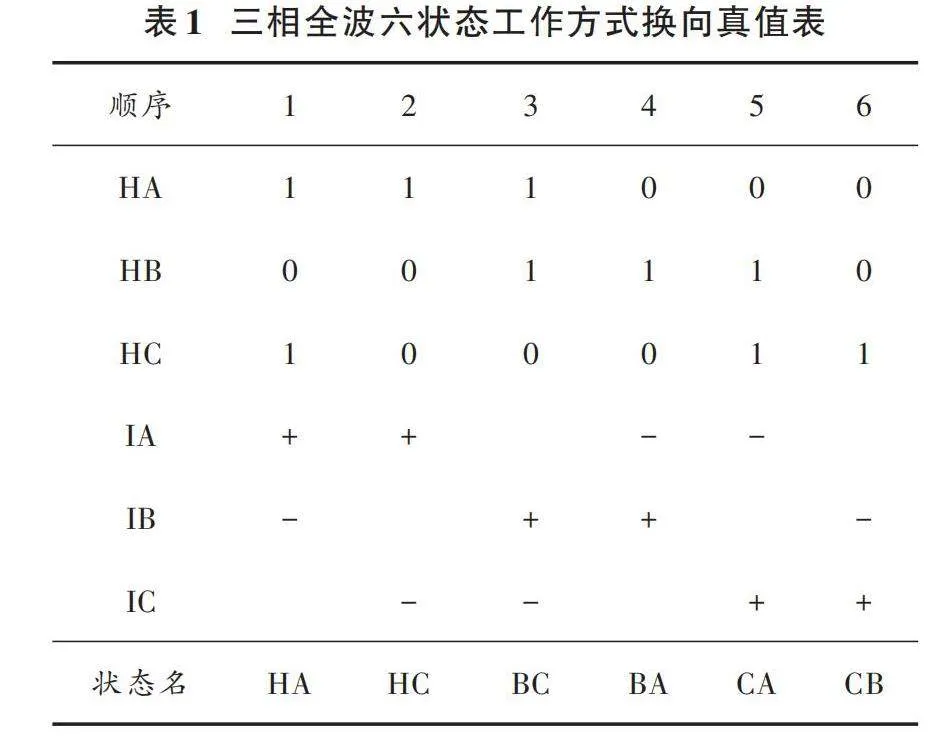
表1為三相全波六步驅動方式換相真值表。在一個電周期內,三相繞組有6組通電狀態:AB、AC、BC、BA、CA、CB。3個霍爾傳感器的任務是轉子磁鋼轉動一個電周期內檢測到6個換相點[10]。每個霍爾電路輸出時間占比相同,均為180°電角度,在一對磁極下即一個電周期內,3個霍爾位置傳感器需均勻布置,即之間的相位差為120°。按照真值表中3個霍爾傳感器輸出高電平和低電平的不同組合時刻來決定6個換相點。例如:霍爾電路輸出HA的高電平時,A相開始通正電流,C相結束通正電流;輸出HA的低電平時,C相通負電流變成A相通負電流。由真值表可知上下橋臂通斷狀態與霍爾位置傳感器信號的邏輯關系。
2" 新型三定子直流無刷電機的建模與仿真
2.1" 電機模型
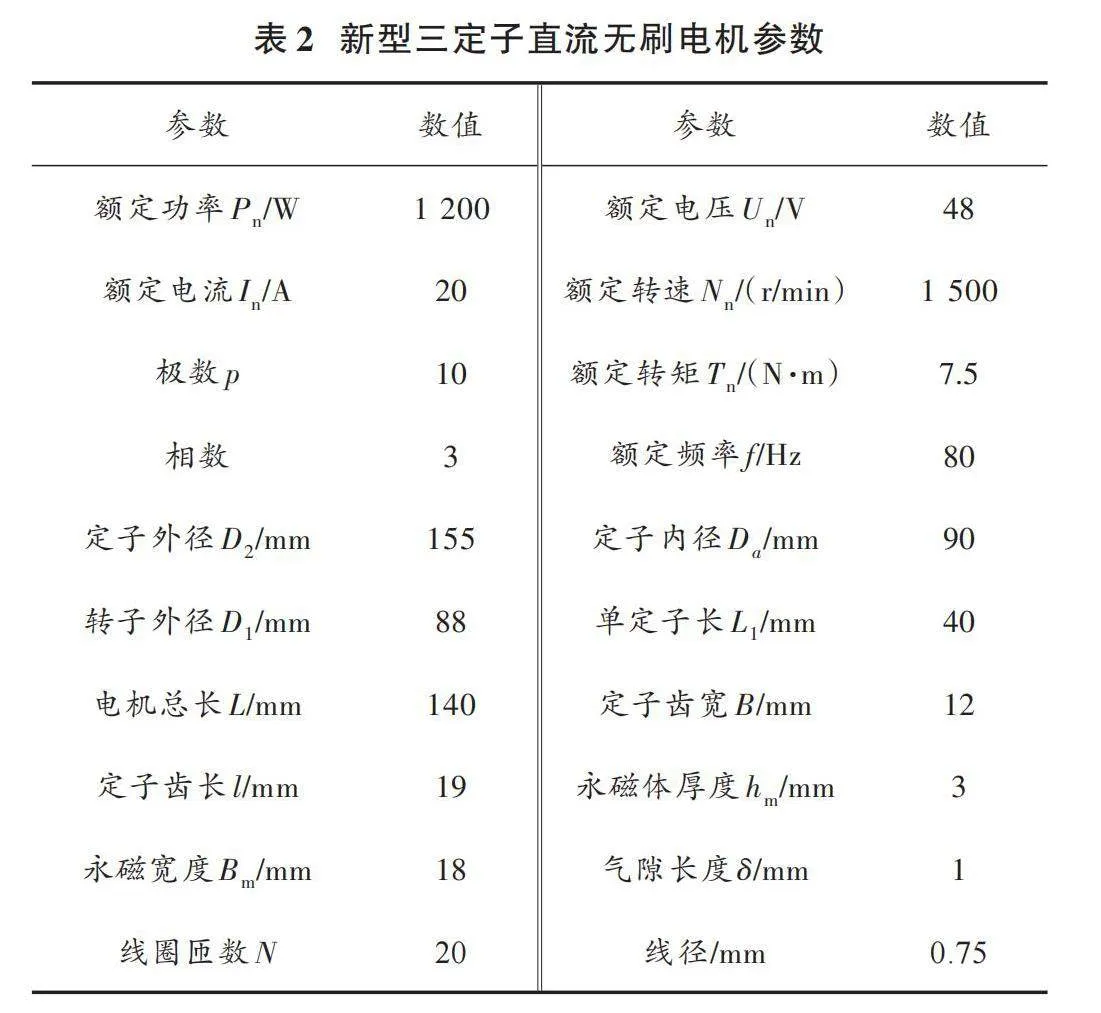
電機結構和主要尺寸參數如表2所示。本文利用Ansoft maxwell有限元分析軟件建立了三定子直流無刷電機結構模型,如圖4所示。然后對整體模型進行網格劃分,最后根據電機性能要求進行參數化求解。
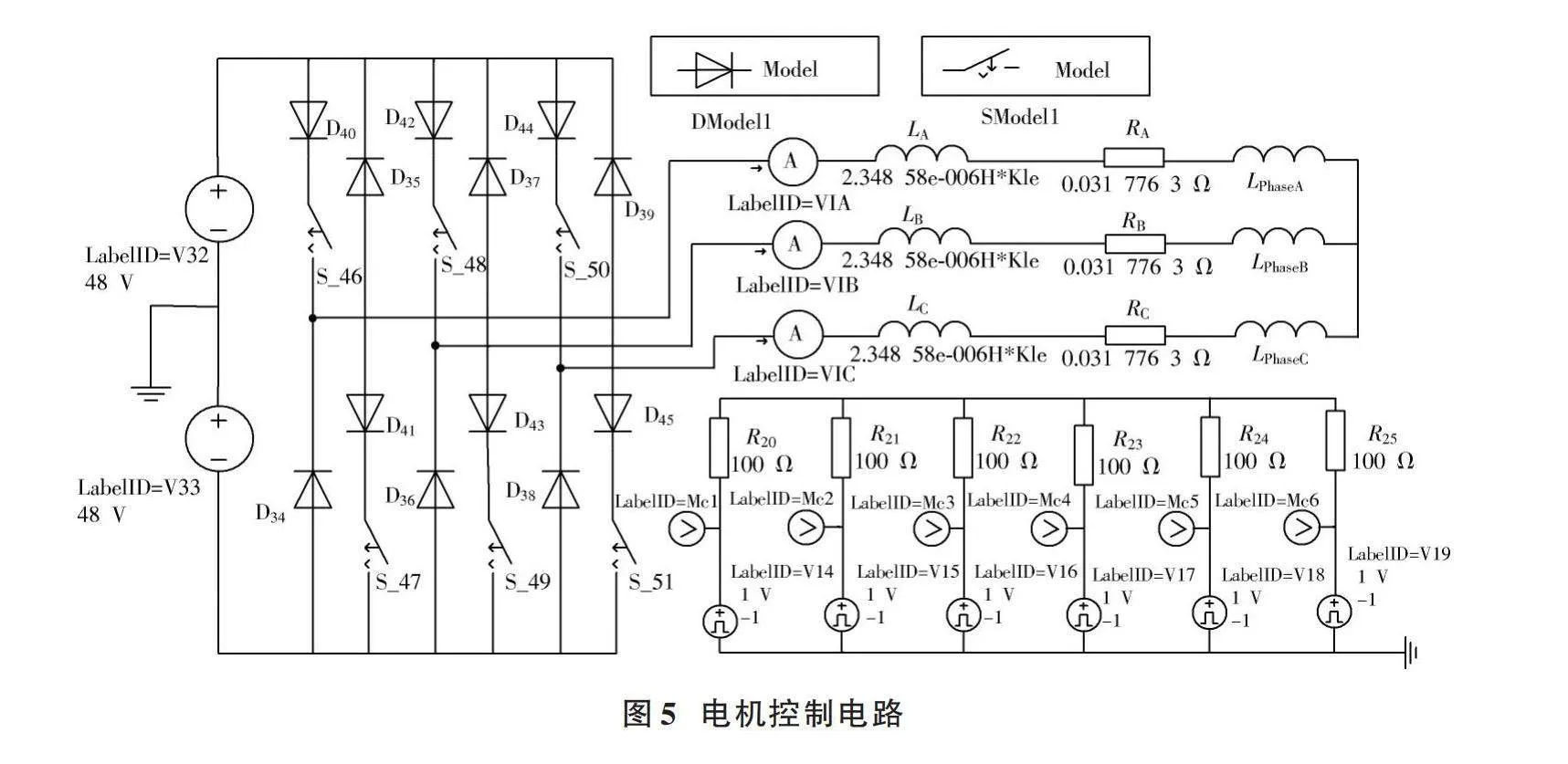
利用Ansoft maxwell搭建電機外部驅動電路與有限元模型耦合,來模擬電機控制器驅動電機過程,包括電源、開關組件、繞組、電阻電感等元件。電機采用三相全橋式電路控制,四對功率開關管對電機三相繞組中的兩相導通提供電壓進行控制,使每相導通時間間隔120°電角度,一個電周期內完成6次換向,即六步控制。圖5為電機控制電路圖。
2.2" 靜態磁場分析
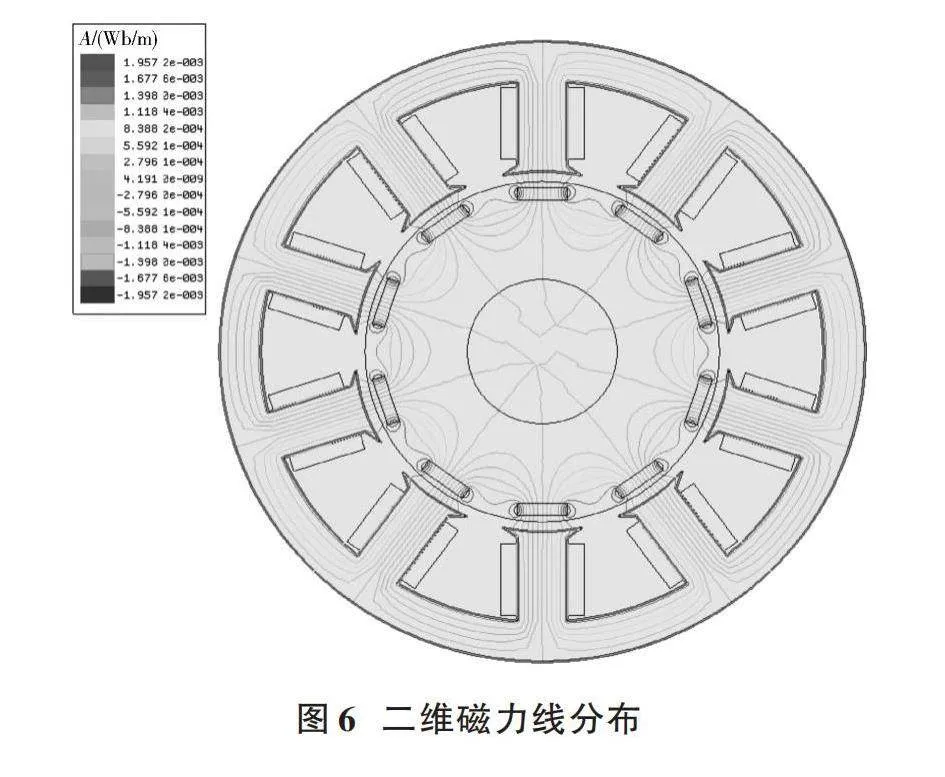
新型三定子直流無刷電機永磁體采用內嵌式,相鄰的矩形永磁體單元徑向交替充磁,因此轉子內嵌永磁體產生的永磁磁通穿過氣隙,進入定子齒鐵心,在繞組中產生有效磁鏈,再從相鄰定子齒鐵心出來,再次反向穿過氣隙回到相鄰反向充磁的永磁體中。圖6所示為二維磁場磁力線分布。
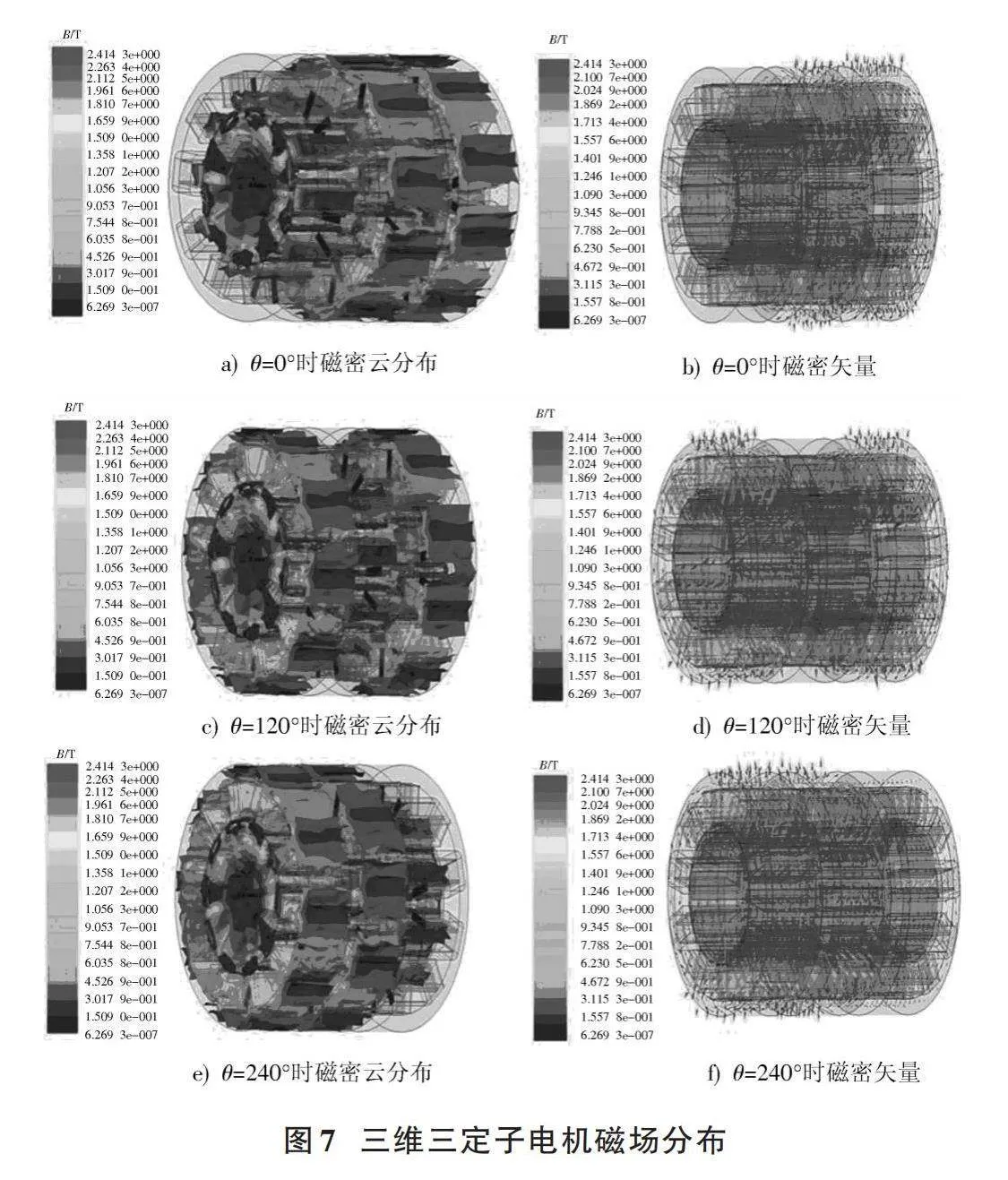
在分析求解模型時,電機轉子的初始位置為永磁體中軸線與第一定子兩齒中心線相重合的位置,即電角度[θ]為0°時刻位置。圖7給出了三定子電機在運行中不同時刻的空載磁密云分布(左)及磁密矢量(右)。
在轉子位于電角度[θ]為0°位置時刻,永磁體處于第一定子兩齒正中間,永磁磁通幾乎不進入第一定子齒鐵心內,磁通幾乎為0;而永磁體位置更加靠近第二、第三定子齒,永磁磁通大量進入到定子鐵心中,其定子齒部磁通密度達到1.7 T左右。
當轉子轉動到電角度[θ]為120°位置時刻,永磁磁通幾乎不進入第二定子齒鐵心內,磁通幾乎為0;而永磁磁通大量進入到第一、第三定子齒鐵心中。當轉子轉動到電角度[θ]為240°位置時刻,永磁磁通幾乎不進入第二定子齒鐵心內,磁通幾乎為0;磁通大量進入第一、第三定子齒鐵心內。通過分析發現,定子齒部鐵心磁通隨轉子位置發生周期性變化,各定子齒鐵心磁通變化相差120°電角度,因此電機繞組將產生周期性的正弦感應電動勢,且分別繞制在第一、第二、第三定子齒上的集中繞組,產生相位差為120°電角度的正弦感應電動勢。
2.3" 氣隙面域磁密分析
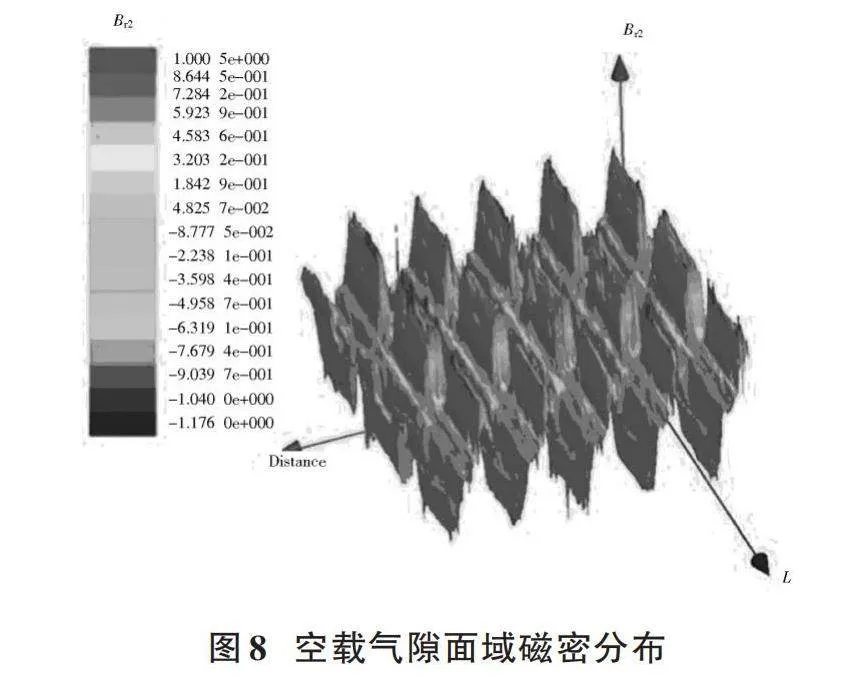
氣隙區域磁通量是電機各項性能參數計算的基礎[11]。利用軟件參數掃描功能對電機軸向長度進行掃描,得到的氣隙面域磁密狀況分布如圖8所示。
從圖8可以看出,氣隙磁密在圓周切向軸線上呈正弦周期性分布,在定子軸線徑向上的磁密分布呈三段,正好對應三個定子,且三段磁密的周期性分布相差120°電角度。氣隙面域的磁密平均達到0.5 T左右,其峰值達到0.9 T,磁密分布存在少許部位的畸變,但整體分布狀態正常。
2.4" 空載反電動勢分析
在電機運行過程中,必然在繞組中發生自感與互感現象,產生感應電動勢,從而影響直流無刷電機的轉矩能力。為獲得電機最大電磁轉矩,必須使電機反電動勢與電樞繞組電流同相位。
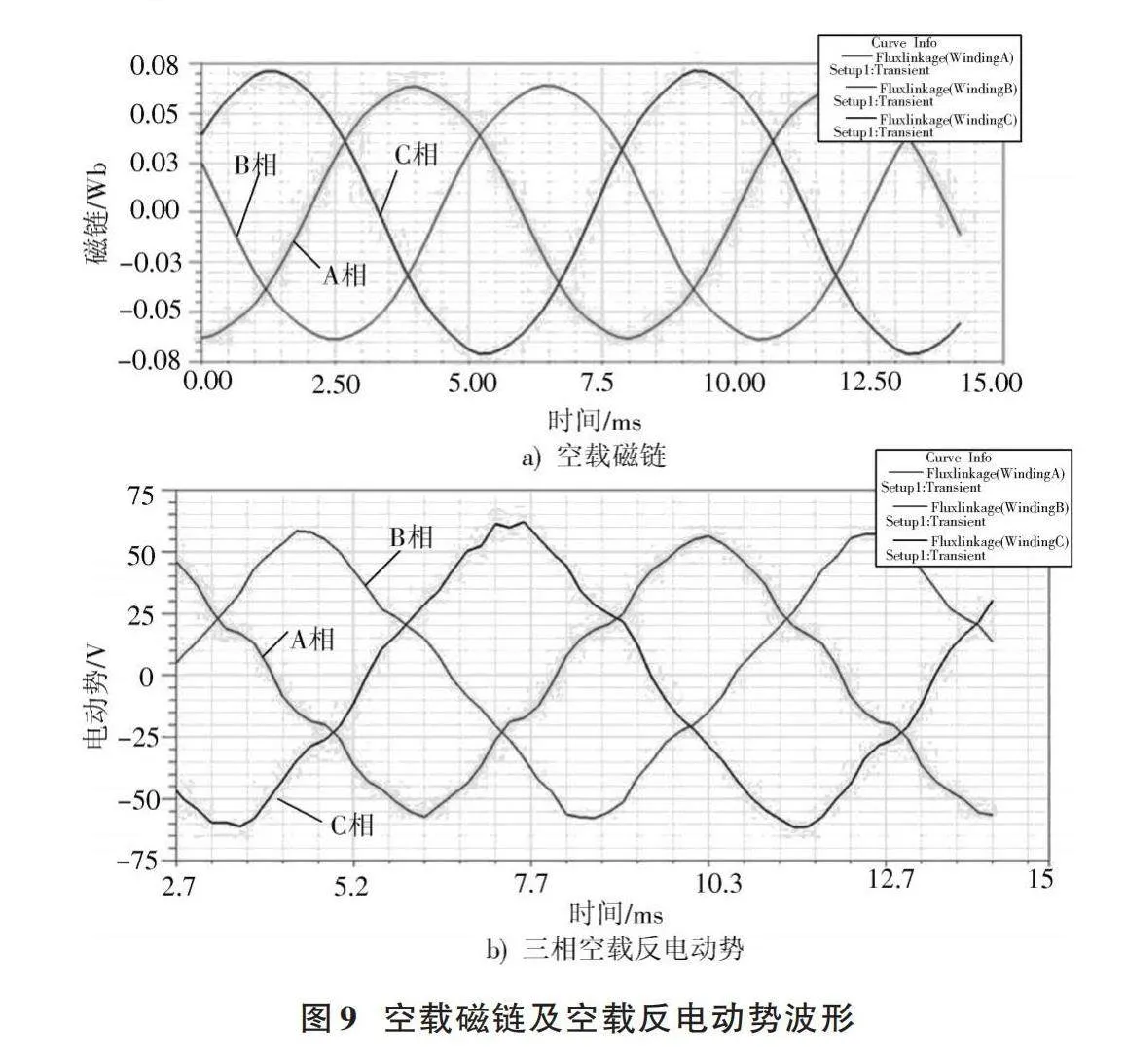
圖9所示為電機運行在額定轉速為1 500[ r/min]時的繞組空載磁鏈和空載反電動勢波形。
從圖9波形中可看出,空載磁鏈波形與空載反電動勢波形正弦度較高,其中磁鏈幅值達到0.7 Wb,反電動勢峰值達到60 V。但由于定子齒槽存在一定的邊緣效應,致使反電動勢波形出現一定畸變,可能存在少量的低次諧波。
2.5" 轉矩特性分析
三定子電磁轉矩的表達式為:
[TemA=E0I0?-E0I0?cos2θ] (6)
[TemB=E0I0?-E0I0?cos2θ-120°] (7)
[TemC=E0I0?-E0I0?cos2θ+120°] (8)
單定子產生的電磁轉矩由兩部分組成,第一部分為恒定分量,第二部分是頻率為2倍于繞組交流電頻率的正弦脈動電磁轉矩。兩部分相疊加后為2倍電周期、幅值2倍于恒定分量的正弦波形。
三定子所產生的電磁轉矩合成后,總電磁轉矩為:
[Tem=TemA+TemB+TemC=3E0I0?] (9)
由式(9)可以看出,合成后電磁轉矩為恒定值。
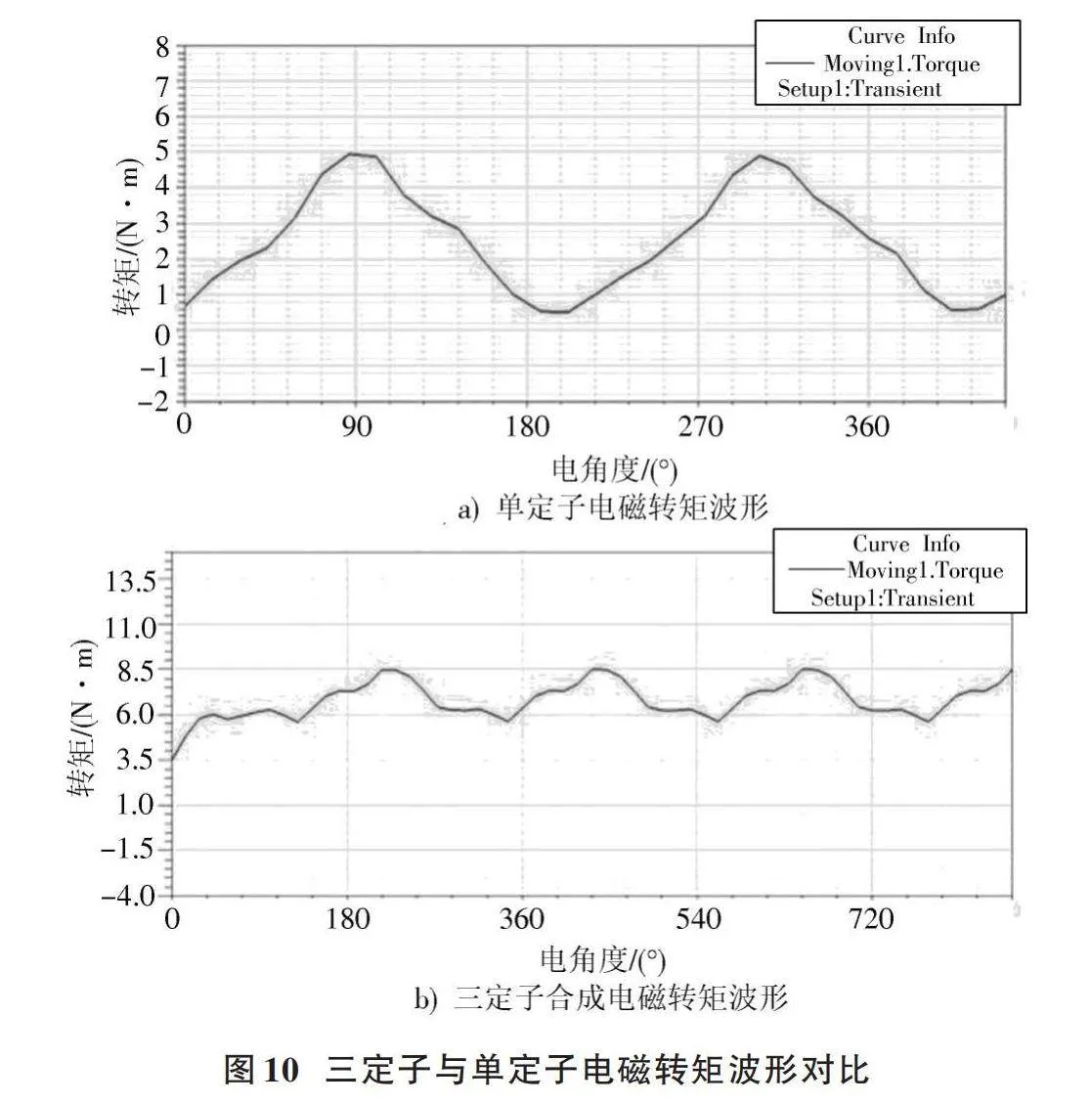
通過有限元分析軟件,對分別繞制在三個定子齒上的集中繞組通入額定的三相交流電流,其相位差為120°電角度,頻率為額定轉速下電流切換頻率。對三定子電機和單定子電機進行電磁轉矩對比分析,得到如圖10所示的電磁轉矩波形。
三定子電機的電磁轉矩峰值達到8.5 N·m,平均值為7.[5] N·m,但由于反電動勢內諧波的存在,造成轉矩輕微波動,其波動幅值為3 N·m,較單定子電機電磁轉矩峰值4.9 N·m提升了42%;較單定子電機電磁轉矩波動幅值4.3 N·m降低了30%。
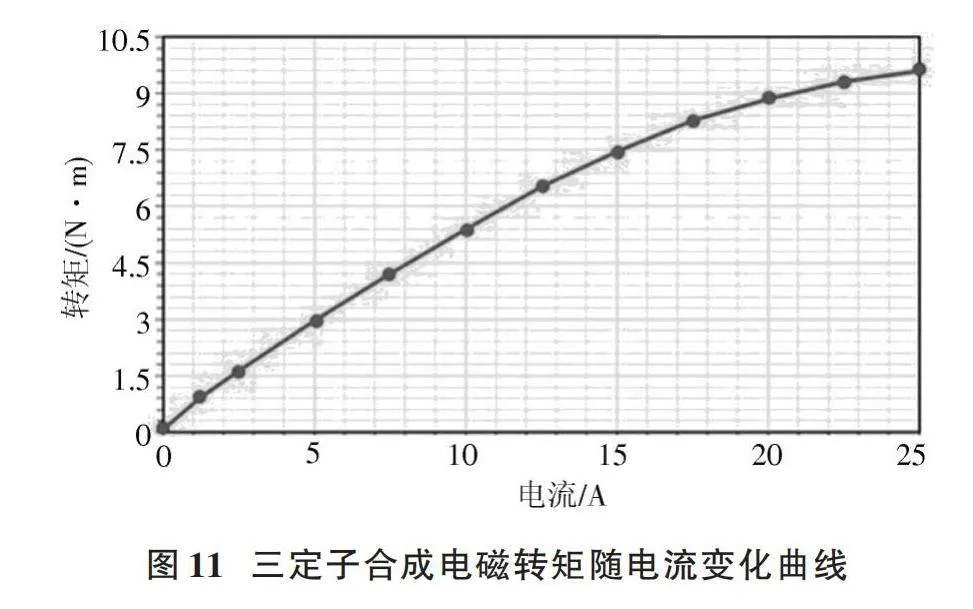
當通入三相電流為不同有效值的正弦電流時,電機將對應產生不同的平均電磁轉矩,如圖11所示。當通入電流有效值越小,其電磁轉矩也越小;當通入過載大于額定電流有效值20 A后,電磁轉矩最高可達到9.5 N·m,但是電磁轉矩上升幅度越來越緩,說明電機鐵心磁密開始飽和。
2.6" 缺相運行特性分析
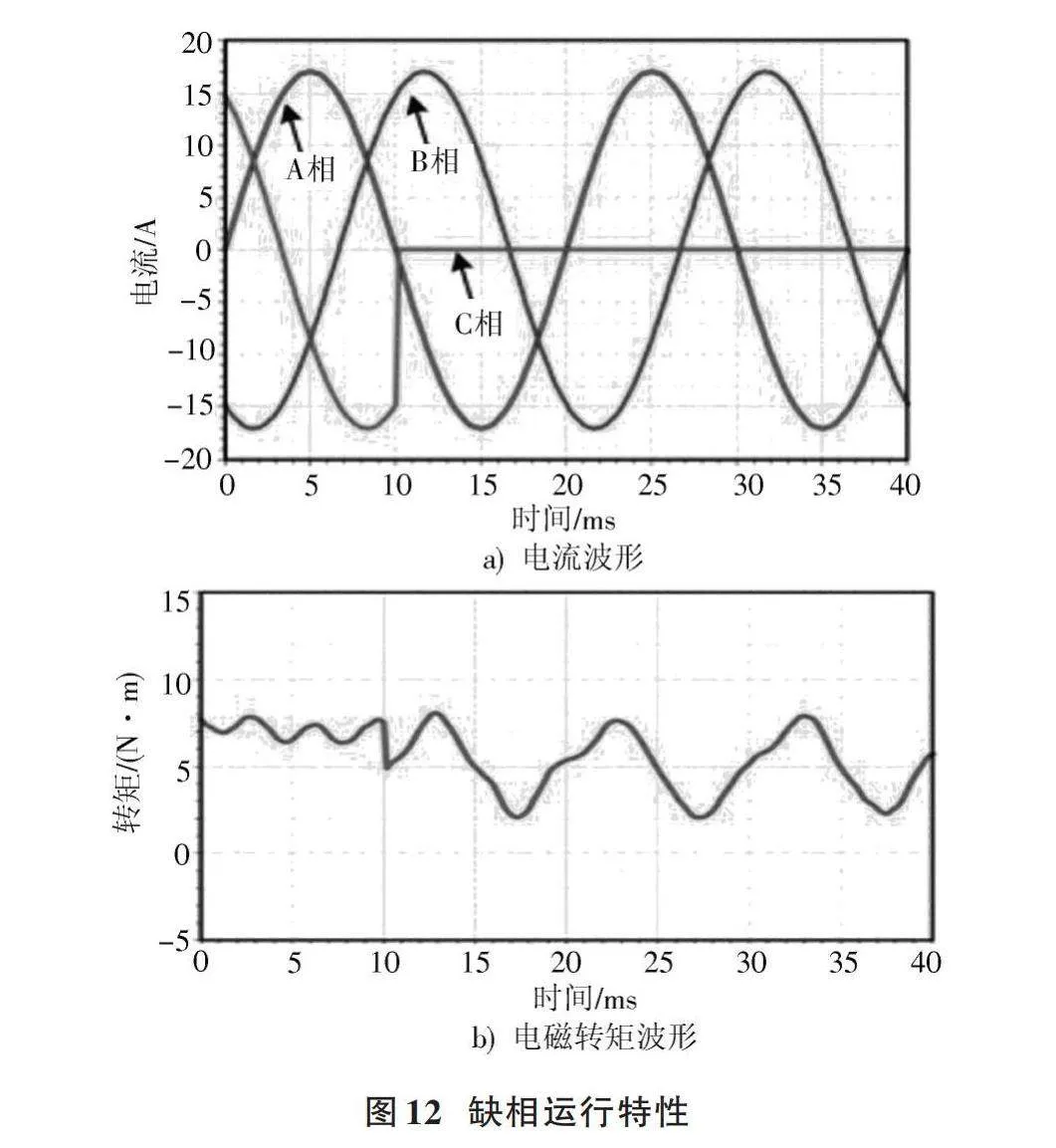
新型三定子直流無刷電機三個定子之間相互獨立,各相間磁場相互解耦,如其中一相繞組出現電路故障,其他兩相仍然可正常運行。圖12為缺相三相電流波形及電磁轉矩波形,是在有限元軟件仿真中模擬電機運行10 ms時C相出現故障,只靠A、B兩相產生電磁轉矩。仿真結果表明,電機在對轉矩穩定性要求不是極高的環境下,具備缺相運行能力,這說明新型三定子電機驅動控制可靠性較高。
由圖12a)可看出,三相電流繞組中C相繞組在10 ms處故障斷電,C相繞組電流歸零,因此C相繞組定子部分將停止產生電磁轉矩。但由于三電子繞組之間電磁場解耦獨立,A、B相電流及所產生的電磁轉矩依舊正常。如圖12b)所示,電機的三定子電磁轉矩在10 ms時發生變化,電磁轉矩平均值由7 N·m下降到5 N·m左右,電磁轉矩波動較未缺相時明顯,但仍能保持電磁轉矩輸出能力。由此可知,新型三定子直流無刷電機在缺相后,仍可較為穩定地輸出電磁轉矩,在對輸出轉矩脈動要求不高的工況下,具備容錯運行能力。
2.7" 電機功率及效率分析
圖13為有限元軟件分析得到的三相繞組自感與互感波形圖。從圖中可看出,電機的三相互感幾乎為零,這驗證了三定子電機三相電磁獨立解耦性。三相繞組自感平均值為4.5 mH,具有幅值較小的正弦特性,從而反映了電機在運行過程中具有較為穩定的功率因數。
電機功率因數為電機繞組有功電流與總電流的比值,是衡量電機設計好壞的重要指標之一。功率因數可由如下簡化公式計算:
[cosφ=11+LsIψm] (10)
式中:[cosφ]為功率因數;[ψm]為永磁磁鏈;[I]為電流有效值;[Ls]為電機同步電感。可看出電機功率因數大小取決于[LsIψm]的大小,因此要提高電機功率因數,需減小電感值或電流有效值,但更佳的做法是減小電機電感,從而提高電機功率因數。對于本文所研究的電機,其只需考慮繞組自感,互感幾乎為0,且單相自感僅為4.5 mH。基于公式(10)可計算出功率因數為0.79,驗證了三定子電機具有較高質量運行能力。
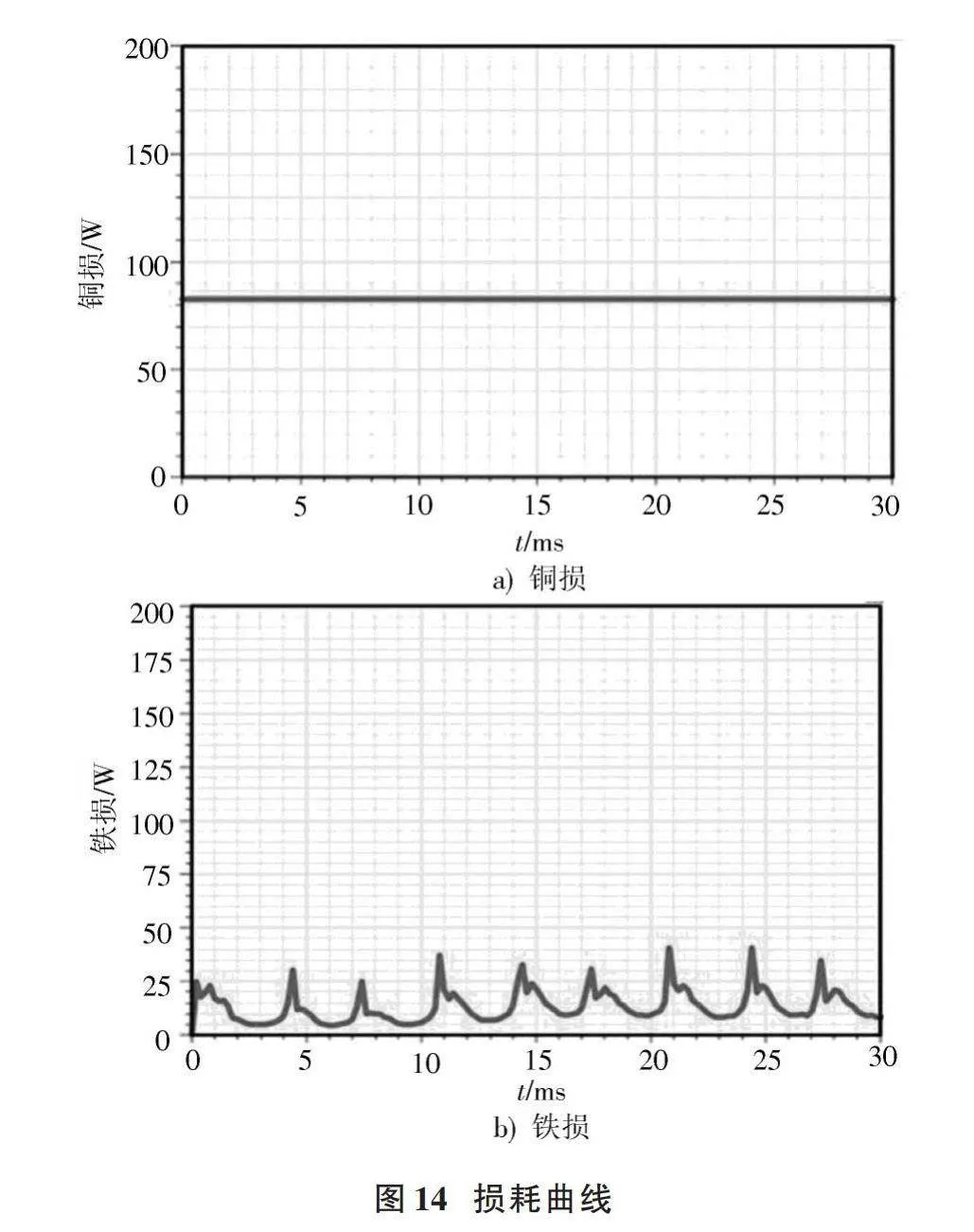
電機的損耗直接影響電機能量轉換效率,在電機電能轉換為機械能的過程中,電機不可避免地產生損耗,包括鐵損、銅損、機械摩擦損耗等[12]。
圖14為電機銅損和鐵損曲線。在額定轉速為1 500 r/min和額定轉矩為7.5 N·m的情況下,采用有限元軟件進行瞬態求解,若不計機械損耗,電機理想效率可達92%。
3" 電機樣機試驗分析
3.1" 電機樣機試驗
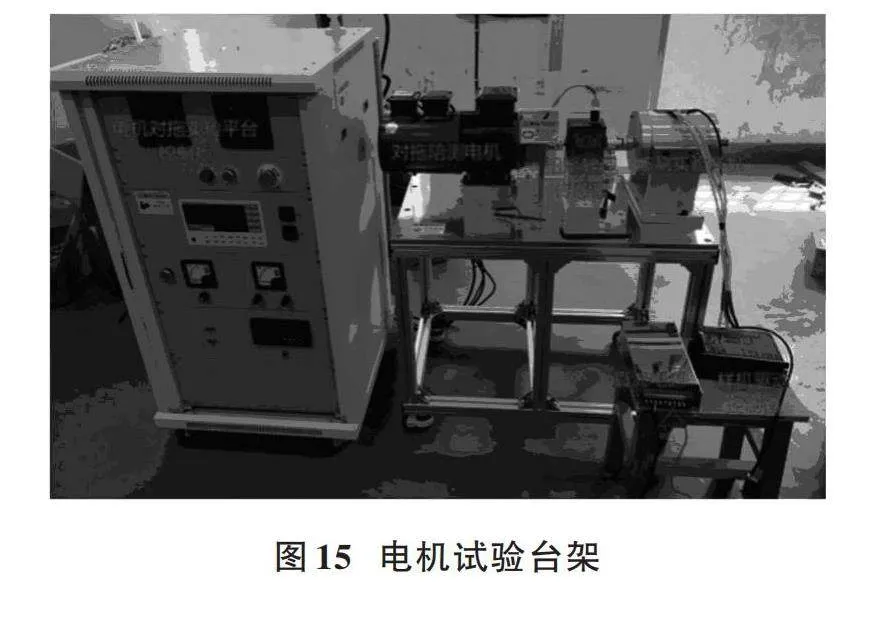
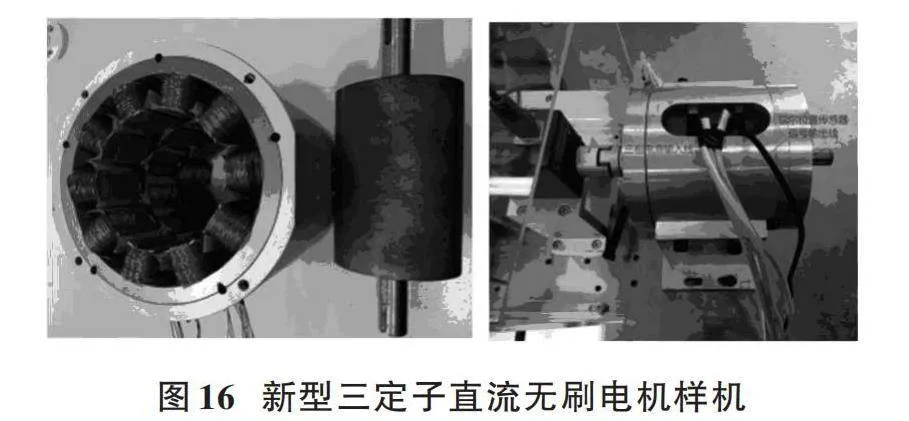
圖15和圖16分別為電機試驗臺架和電機樣機。試驗臺架包含一臺三相交流陪測電機、被測電機(三定子電機樣機)、一個高精度轉矩傳感器、一臺三相功率計、一臺轉矩轉速測量儀、陪測電機驅動控制器。陪測電機的作用是以同步速度向被測電機施加負載轉矩,其轉速及轉矩區間與被測電機的轉速、轉矩區間有較寬的重合度,陪測電機額定功率為1 100 W,額定轉矩為9 N·m。轉矩傳感器量程范圍為0~10 N·m。
對新型三定子直流無刷電機樣機的空載反電動勢、穩態轉矩特性、變速轉矩特性、變載轉矩特性等進行試驗測試。
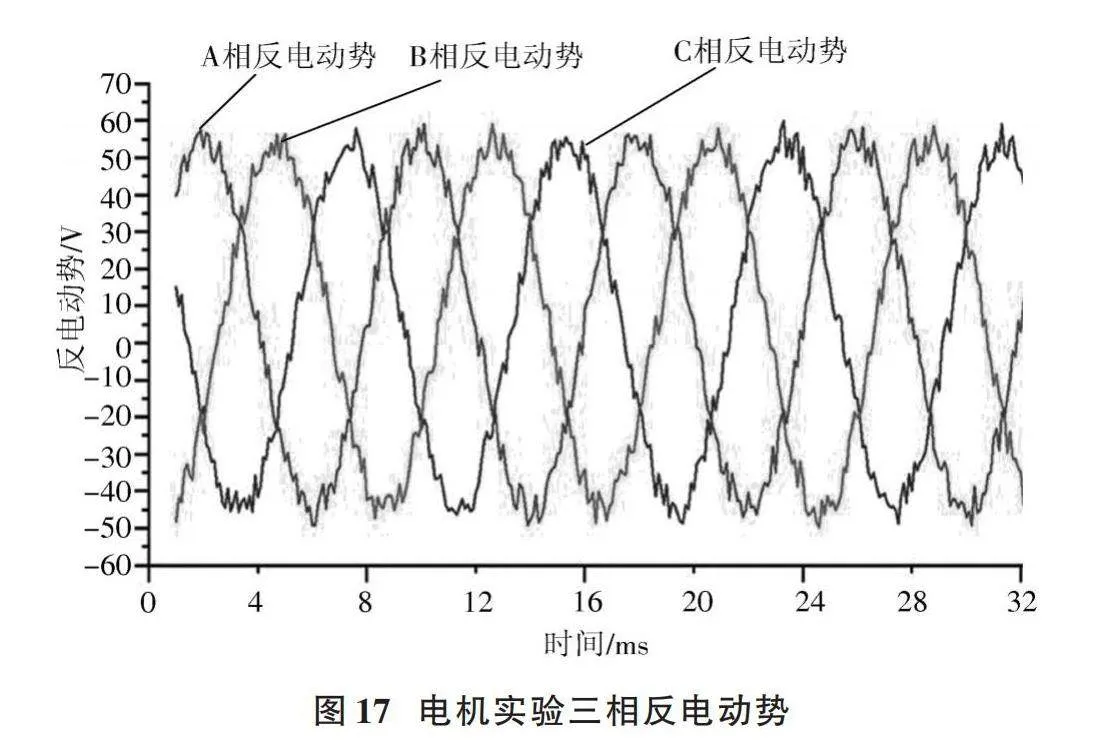
圖17為陪測電機轉速為樣機額定轉速1 500 r/min狀態下,上位機軟件所測得的樣機反電動勢波形。其波形呈正弦波且三相對稱,單相反電動勢峰值為55 V,與有限元軟件計算得到的峰值60 V相比有小幅度降低,這可能是由于電機加工或裝配工藝水平有限,造成了少量磁漏。但波形形態、相位差均與上文分析結果一致,這也驗證了電機設計的合理性。
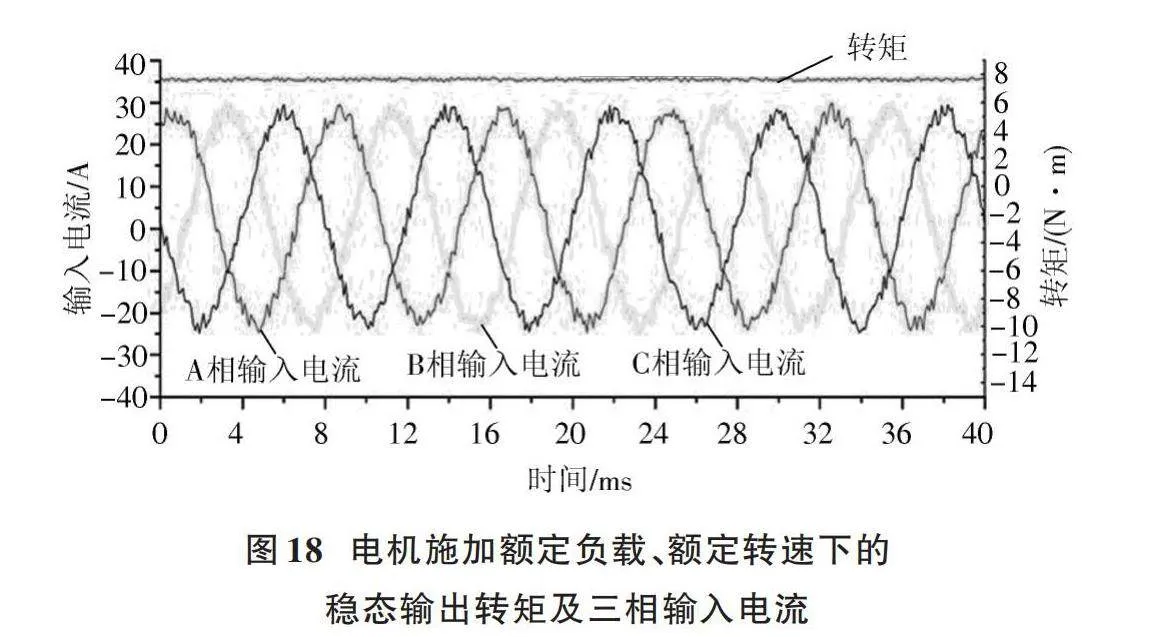
圖18為施加額定負載、額定轉速下的轉矩曲線及輸入電流波形。從圖中波形可以看出,三相電流波形峰值達28 A,其有效值大約為22 A,高于額定電流20 A。但由于在電機實際運行過程中存在機械摩擦損耗和其他損耗,在上文有限元軟件計算過程中并未考慮,因此電機為克服高于額定負載以外的損耗,控制系統必須加載更高的輸入電流幅值。轉矩輸出穩定在7.5 N·m上下,幅度波動極小,表明電機具有穩定轉矩輸出能力。
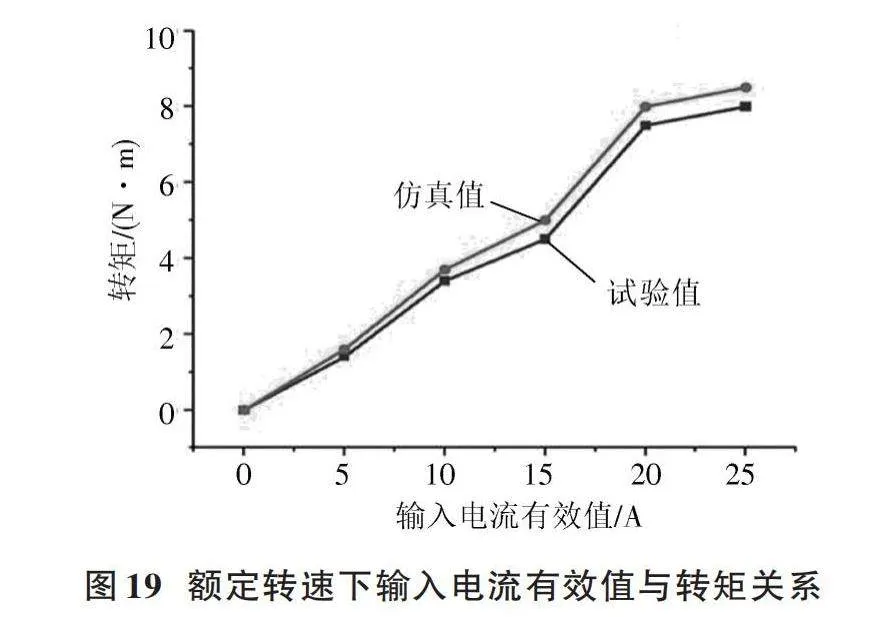
圖19為額定轉速、不同負載下電流有效值與輸出轉矩關系的樣機試驗與有限元仿真結果對比。從圖中可看出,有限元仿真結果與試驗結果有著較高的一致性,但在同樣有效值大小的電流下,試驗輸出轉矩略低于有限元仿真結果。造成這種現象的原因也同樣是電機實際運行過程中還需克服其他損耗,且受加工工藝水平限制,存在漏磁,影響電機性能。
3.2" 電機動態轉矩響應特性分析
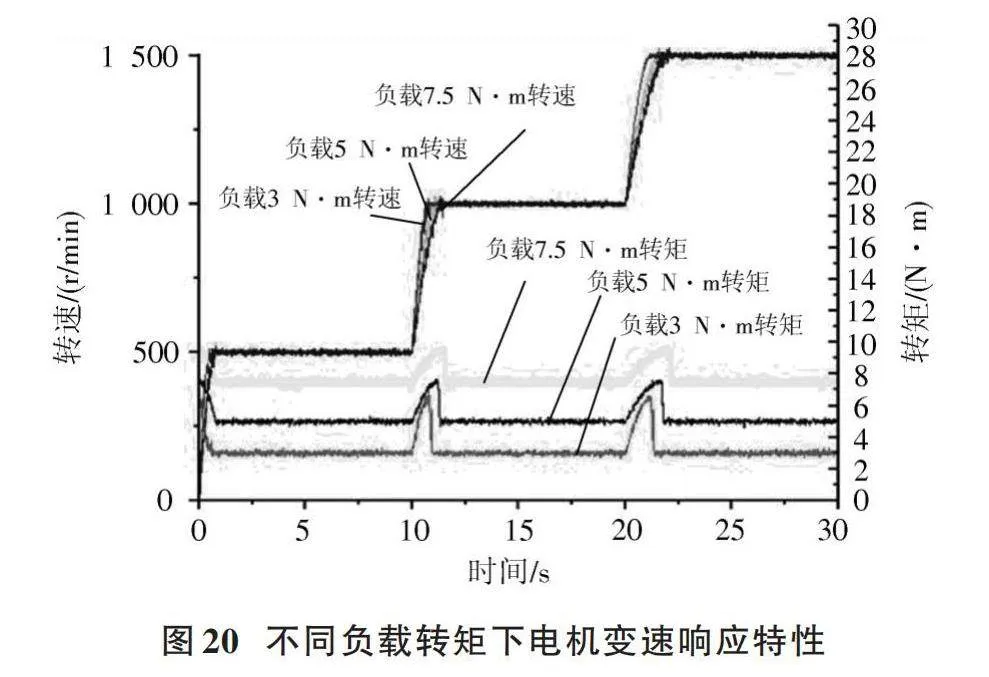
圖20為在施加負載轉矩為3 N·m、5 N·m和7.5 N·m時變速響應特性。試驗過程為:給定500 r/min轉速啟動電機,待電機轉速穩定在500 r/min后,給定轉速提升至1 000 r/min,待電機轉速穩定后,再次提升至1 500 r/min。由圖中可以看出,當負載轉矩為3 N·m時,電機轉速由0 r/min提升到500 r/min的響應時間為0.4 s,由500 r/min提升到1 000 r/min的響應時間為0.8 s,由1 000 r/min提升到1 500 r/min的響應時間為1.2 s;每次轉速增加時,電機輸出轉矩有一個突增,以提升轉速,其轉矩每次突增量為4.5 N·m左右。當負載轉矩為5 N·m時,電機轉速由0 r/min提升到500 r/min的響應時間為0.6 s,由500 r/min提升到1 000 r/min的響應時間為1.2 s,由1 000 r/min提升到1 500 r/min的響應時間為1.7 s;每次轉速增加時,電機輸出轉矩有一個突增,以提升轉速,其轉矩每次突增量為2.5 N·m左右。
當負載轉矩為7.5 N·m時,電機轉速由0 r/min提升到500 r/min的響應時間為0.8 s,由500 r/min提升到1 000 r/min的響應時間為1.5 s,由1 000 r/min提升到1 500 r/min的響應時間為2.1 s;每次轉速增加時,電機輸出轉矩有一個突增,以提升轉速,其轉矩每次突增量為2 N·m左右。
從三組不同負載轉矩下的變速試驗可看出:隨著負載轉矩的增加,電機沒有足夠的輸出轉矩來提供給轉速的突增,因此提速時間也隨之增長;隨著轉速的增加,其提速時間也同樣有所增加,但其轉速最終能夠回歸給定轉速值且保持穩定,轉矩在突變后也能快速地回歸穩定,證明電機具有良好的調速特性。
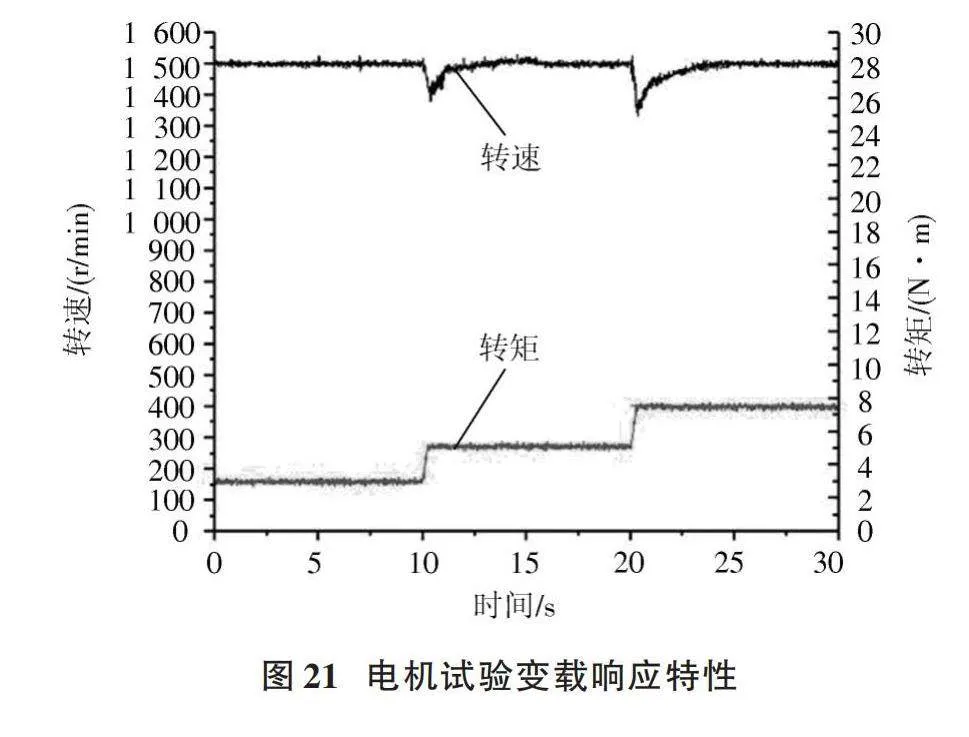
圖21為變載響應特性圖,電機保持額定轉速1 500 r/min,突然兩次增加負載轉矩。從圖中可知,當轉矩負載從3 N·m突然增加至5 N·m后,轉速突然下降至1 400 r/min,隨后轉速較快地恢復至1 500 r/min并維持穩定;當轉矩負載從5 N·m突然增加至7.5 N·m時,電機轉速下降至1 350 r/min左右,隨后電機轉速慢慢地回歸至1 500 r/min并保持穩定。變載試驗驗證了電機具有良好的變載響應能力,但轉矩負載突變至較大值時,其轉速回歸時間較慢,最終轉矩能較好地在給定轉速下維持穩定。
4" 結" 論
本文提出了一種新型三定子直流無刷電機拓撲結構,該結構具有對驅動控制系統兼容性好、輸出轉矩波動小、調速性能好、空間緊湊等特點。通過有限元分析和試驗驗證得出以下結論。
1) 提出的新型三定子直流無刷電機三相繞組間相互獨立且解耦,可實現缺相運行,即某相繞組出現故障,停止輸出電磁轉矩,另外兩相仍可正常產生電磁轉矩,提高了電機在轉矩脈動要求不高的工況下的容錯運行能力。
2) 新型三定子直流無刷電機轉矩峰值可達8.5 N·m,較單定子電機提升了42%;輸出轉矩波動小,較單定子電機波動降低了30%。在額定轉矩7.5 N·m的情況下,電機轉速從啟動到500[ r/min]的響應時間為0.8 s;從500~1 000[ r/min]的響應時間為1.5 s;從1 000~1 500[ r/min]的響應時間為2.1 s。
3) 研制了三定子樣機并進行試驗驗證,試驗實測結果與有限元分析結果相吻合,驗證了理論分析和所提出的三定子直流無刷電機的性能優勢。
參考文獻
[1] 虞詩佳,張卓然,顧相培,等.航空電勵磁雙凸極電機單/雙層繞組下的發電性能研究[J].中國電機工程學報,2023,43(23):9330?9341.
[2] 熊磊,葛紅娟,周波,等.基于矢量控制的電勵磁雙凸極電機失磁容錯運行轉矩脈動抑制策略[J/OL].中國電機工程學報:1?12[2024?02?28].http://kns.cnki.net/kcms/detail/11.2107.TM.20230724.1336.002.html.
[3] 陳云云,李紫茵,周鑫,等.復合結構混合永磁電機抗退磁性能分析及優化[J].電子測量技術,2023,46(11):1?6.
[4] 龐亮,楊清亮,趙朝會,等.基于遺傳算法和TOPSIS法的混合勵磁電機齒槽轉矩優化[J].噪聲與振動控制,2023,43(4):42?48.
[5] 董婷,曹磊,王雪.寬高效率區混合永磁同步磁阻記憶電機設計[J].電機與控制學報,2023,27(5):28?36.
[6] 王孫清,于朝,鄭恒持,等.新型雙定子雙凸極可變磁通記憶電機設計與性能比較[J].微特電機,2024,52(1):6?12.
[7] 閆文舉,張東,李海龍,等.一種多模式雙定子開關磁阻電機混合控制系統[J/OL].中國電機工程學報:1?11[2024?02?27].https://doi.org/10.13334/j.0258?8013.pcsee.231104.
[8] 張文濤,劉欣.雙定子超環面永磁同步電機損耗和效率分析[J/OL].機械科學與技術:1?8[2024?02?27].https://doi.org/10.13433/j.cnki.1003?8728.20230312.
[9] 孫賢備,陳進華,陳思魯,等.無磁軛輻射環雙定子電機磁場分析及轉矩計算[J].微電機,2023,56(10):7?12.
[10] 班解進,張穩橋,石宏順,等.無刷電機霍爾傳感器位置及電機旋向確認方法研究[J].機電信息,2022(9):84?88.
[11] 丁石川,吳振興,李亞,等.基于氣隙磁密差信號峭度因子的永磁同步電機局部退磁故障診斷研究[J/OL].中國電機工程學報:1?10[2024?03?07].https://doi.org/10.13334/j.0258?8013.pcsee.230782.
[12] 王為術,亓月欣,彭巖,等.高速永磁電機損耗特性研究[J].電工技術,2022(21):234?238.
[13] 宋智剛.直流無刷電機自適應控制器研究與實現[D].成都:四川師范大學,2023.
