基于抗飽和的異步電機(jī)調(diào)速性能優(yōu)化
2024-09-26 00:00:00陳秉禎
機(jī)電信息 2024年18期


摘要:異步電機(jī)的調(diào)速控制常采用傳統(tǒng)的PI調(diào)速方式,但由于其存在非線性特性,為提高控制性能,建立了異步電機(jī)矢量控制的數(shù)學(xué)模型,提出了一種由抗積分飽和(AW)控制器和擾動(dòng)觀測(cè)器(DOB)復(fù)合控制的方法對(duì)經(jīng)典的PI控制進(jìn)行優(yōu)化。在優(yōu)化的PI調(diào)節(jié)器中,積分項(xiàng)可根據(jù)調(diào)節(jié)器的輸出是否飽和進(jìn)行單獨(dú)控制,可以削弱積分飽和效應(yīng),也可以較好地消除系統(tǒng)受到的干擾。實(shí)驗(yàn)結(jié)果表明,所設(shè)計(jì)的控制器可以在提高響應(yīng)速度的同時(shí),較好地抑制積分飽和現(xiàn)象,提高異步電機(jī)調(diào)速的性能。
關(guān)鍵詞:異步電機(jī);抗飽和;擾動(dòng)觀測(cè)器
中圖分類號(hào):TM343 文獻(xiàn)標(biāo)志碼:A 文章編號(hào):1671-0797(2024)18-0056-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.18.014
0 引言
異步電機(jī)作為工業(yè)生產(chǎn)中的關(guān)鍵動(dòng)力設(shè)備,其穩(wěn)定運(yùn)行對(duì)于保障生產(chǎn)系統(tǒng)的穩(wěn)定性和可靠性至關(guān)重要。異步電機(jī)性能優(yōu)化需要借助先進(jìn)的電機(jī)設(shè)計(jì)、控制和監(jiān)測(cè)技術(shù),推動(dòng)電機(jī)行業(yè)的技術(shù)創(chuàng)新和發(fā)展。通過(guò)研究和應(yīng)用新型材料、先進(jìn)控制算法、智能監(jiān)測(cè)系統(tǒng)等技術(shù)手段,可以不斷提升異步電機(jī)的性能水平。
異步電機(jī)具有多變量、非線性、強(qiáng)耦合的特性,矢量控制技術(shù)的發(fā)展使異步電機(jī)的調(diào)速性能得到本質(zhì)提高,異步電機(jī)速度控制環(huán)引入了PI調(diào)節(jié)器,這就不可避免地出現(xiàn)了不穩(wěn)定現(xiàn)象,其主要代表就是積分飽和現(xiàn)象,在速度給定突變時(shí)會(huì)出現(xiàn)超調(diào)量大、響應(yīng)慢、抗干擾差等不良動(dòng)態(tài)特性[1]。要抑制積分飽和現(xiàn)象,一種有效的方法是設(shè)計(jì)補(bǔ)償抗積分飽和控制器對(duì)PI調(diào)節(jié)器進(jìn)行優(yōu)化,可以使速度響應(yīng)變快、超調(diào)量變小。
文獻(xiàn)[2]提出一種新型抗飽和PI控制器在PWM整流器中的應(yīng)用,這種新型PI調(diào)節(jié)器的積分項(xiàng)可以根據(jù)調(diào)節(jié)器的輸出是否飽和進(jìn)行單獨(dú)控制,提高電壓控制環(huán)的性能。文獻(xiàn)[3]提出一種具有預(yù)測(cè)功能的抗積分飽和PI速度控制器,該策略利用PD預(yù)測(cè)功能,根據(jù)其輸出值的符號(hào)控制PI控制器的積分方向。
經(jīng)典的PI調(diào)節(jié)器抗干擾能力差,為了消除系統(tǒng)的干擾,設(shè)計(jì)擾動(dòng)觀測(cè)器對(duì)系統(tǒng)的干擾進(jìn)行估計(jì)及補(bǔ)償,可以提高系統(tǒng)的抗干擾能力。
文獻(xiàn)[4]提出了一種基于擾動(dòng)觀測(cè)器的非線性系統(tǒng)的前饋控制方法,該方法不依賴被控對(duì)象的模型。文獻(xiàn)[5]提出了一種用于電壓源逆變器控制的附加型擾動(dòng)觀測(cè)器,提高了逆變器輸出的抗干擾性能和動(dòng)態(tài)響應(yīng)速度。文獻(xiàn)[6]提出了一種基于擾動(dòng)觀測(cè)器和有限時(shí)間控制的永磁同步電機(jī)調(diào)速方法,該復(fù)合控制具有更好的抗擾動(dòng)性能和更優(yōu)越的收斂性能。
為了優(yōu)化異步電機(jī)矢量控制系統(tǒng)性能,本文設(shè)計(jì)了AW控制器和DOB復(fù)合優(yōu)化的PI調(diào)節(jié)器,綜合二者的優(yōu)點(diǎn),既能減少系統(tǒng)速度響應(yīng)的時(shí)間和超調(diào)量,也能提高電機(jī)的運(yùn)行性能。
1 轉(zhuǎn)子磁場(chǎng)定向矢量控制基本原理
基于抗飽和的異步電機(jī)性能優(yōu)化是針對(duì)異步電機(jī)在高負(fù)載運(yùn)行時(shí)可能出現(xiàn)的飽和現(xiàn)象而提出的一種優(yōu)化方法。通常情況下,異步電機(jī)在高負(fù)載條件下,磁通飽和會(huì)導(dǎo)致電機(jī)性能下降、效率降低、溫升增加,這可能會(huì)影響電機(jī)的可靠性和使用壽命。因此,基于抗飽和的優(yōu)化方法旨在減輕或消除這種飽和效應(yīng),從而提高電機(jī)的性能和效率。
常見(jiàn)的基于抗飽和的異步電機(jī)性能優(yōu)化方法包括:
1)磁通控制:通過(guò)控制電機(jī)的磁通,可以在高負(fù)載情況下避免磁通飽和。這可以通過(guò)調(diào)整電機(jī)的定子電壓、改變電機(jī)的勵(lì)磁電流或改變電機(jī)的轉(zhuǎn)子設(shè)計(jì)來(lái)實(shí)現(xiàn)。
2)電流控制:通過(guò)優(yōu)化電5cdde1fc06fbd8077467d5353fdafcc0機(jī)的電流控制策略,減少在高負(fù)載條件下的電機(jī)磁通飽和。這可能涉及采用先進(jìn)的控制算法,如矢量控制或直接轉(zhuǎn)矩控制,以確保電機(jī)運(yùn)行在最佳工作點(diǎn)。
3)優(yōu)化磁路設(shè)計(jì):通過(guò)優(yōu)化電機(jī)的磁路設(shè)計(jì),可以改善磁通分布,減少磁通飽和的發(fā)生。這可能包括改變電機(jī)的鐵芯材料、改變定子和轉(zhuǎn)子的幾何形狀以及優(yōu)化繞組設(shè)計(jì)等。
4)磁通觀測(cè)與估算:實(shí)時(shí)觀測(cè)和估算電機(jī)的磁通狀態(tài),可以幫助控制系統(tǒng)及時(shí)采取措施來(lái)減輕磁通飽和效應(yīng)。這可以通過(guò)使用傳感器或基于模型的方法來(lái)實(shí)現(xiàn)。
5)熱管理:有效的熱管理可以幫助減少電機(jī)在高負(fù)載條件下的溫升,從而減輕磁通飽和效應(yīng)。這可能包括采用更好的散熱設(shè)計(jì)、提高繞組的絕緣性能以及優(yōu)化工作環(huán)境等。
忽略系統(tǒng)中的轉(zhuǎn)矩阻尼和扭轉(zhuǎn)彈性轉(zhuǎn)矩時(shí),按轉(zhuǎn)子磁場(chǎng)方向構(gòu)建的異步電機(jī)數(shù)學(xué)模型的電壓方程、磁鏈方程、轉(zhuǎn)矩方程(轉(zhuǎn)子磁場(chǎng)定向下的同步旋轉(zhuǎn)坐標(biāo)系為MT坐標(biāo)系)分別如下[7]:
式中:usM、usT為定子M、T軸電壓;ψr、ψrM、ψrT為轉(zhuǎn)子磁鏈和轉(zhuǎn)子M、T軸磁鏈;ωs、ωsl為電機(jī)同步旋轉(zhuǎn)角速度及轉(zhuǎn)差角速度;isM、isT、irM、irT為定子M、T軸電流及轉(zhuǎn)子M、T軸電流;Rs、Rr為定、轉(zhuǎn)子電阻;Ls、Lr、Lm為定子電感、轉(zhuǎn)子電感和定轉(zhuǎn)子間互感;Te、TL為電機(jī)的電磁轉(zhuǎn)矩、負(fù)載轉(zhuǎn)矩;np為磁極對(duì)數(shù);wr為負(fù)載角速度;J為轉(zhuǎn)動(dòng)慣量;p、t為微分算子和時(shí)間。
由式(1)(2)及電機(jī)理論得:
2 AW控制器和DOB復(fù)合優(yōu)化的PI調(diào)節(jié)器的設(shè)計(jì)
在異步電機(jī)調(diào)速系統(tǒng)中采用傳統(tǒng)的PI控制器會(huì)產(chǎn)生windup現(xiàn)象(由于電機(jī)輸入飽和而產(chǎn)生的系統(tǒng)超調(diào)和遲鈍現(xiàn)象),且易受干擾,AW控制器和DOB復(fù)合優(yōu)化的目的是提高系統(tǒng)的性能。
2.1 AW控制器的設(shè)計(jì)
AW控制器的算法有3種:條件積分法、反饋計(jì)算法和變結(jié)構(gòu)法。變結(jié)構(gòu)法是條件積分法和反饋計(jì)算法的結(jié)合,綜合利用了兩者的優(yōu)點(diǎn),同時(shí)也克服了兩者的不足。
原理如下:當(dāng)限幅使控制器的輸出與被控對(duì)象的輸入不等時(shí),將二者的差作為反饋信號(hào)來(lái)消除飽和誤差,抑制積分windup現(xiàn)象;當(dāng)控制器中無(wú)windup現(xiàn)象時(shí),控制器退為普通PI控制器。變結(jié)構(gòu)AW控制器優(yōu)化的PI調(diào)節(jié)器既可以用傳統(tǒng)控制理論設(shè)計(jì)控制器參數(shù),又可以有效抑制windup現(xiàn)象,有效減少超調(diào)量,縮短調(diào)節(jié)時(shí)間。
積分控制如下:
Iswitch=ki·e, un=us,
ki·e+kc·(us-un),un·e>0,un≠us (6)
式中:un和us分別為限幅前控制器的實(shí)際輸出和限幅后控制器輸出;kc為補(bǔ)償系數(shù)。
2.2 DOB的設(shè)計(jì)
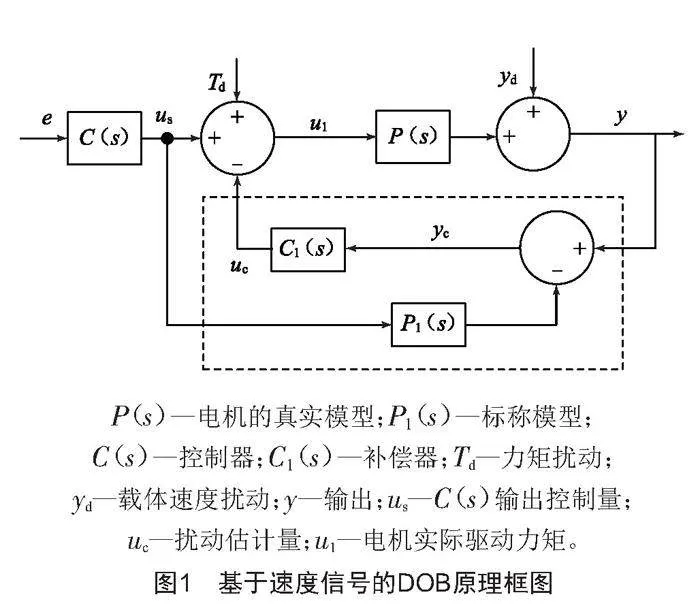
設(shè)計(jì)DOB將實(shí)際系統(tǒng)輸出與名義模型輸出的差作為一個(gè)等效干擾,再將觀測(cè)出的等效干擾作為補(bǔ)償反饋到輸入端[8-10]。基于速度信號(hào)的DOB的基本結(jié)構(gòu)如圖1所示。
由原理框圖可知,虛線框內(nèi)表達(dá)式如下(式中各量均是對(duì)應(yīng)的頻率形式):
uc(s)=[y(s)-us(s)P1(s)]C1(s) (7)
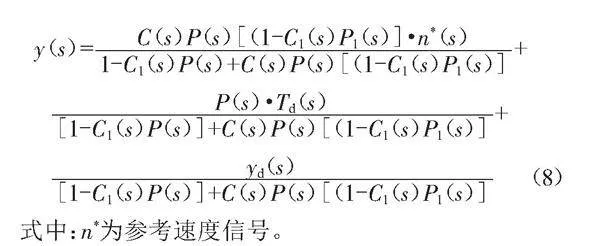
穩(wěn)定平臺(tái)控制系統(tǒng)的輸入、輸出關(guān)系如下:
(8)
式中:n*為參考速度信號(hào)。
3 實(shí)驗(yàn)驗(yàn)證與分析
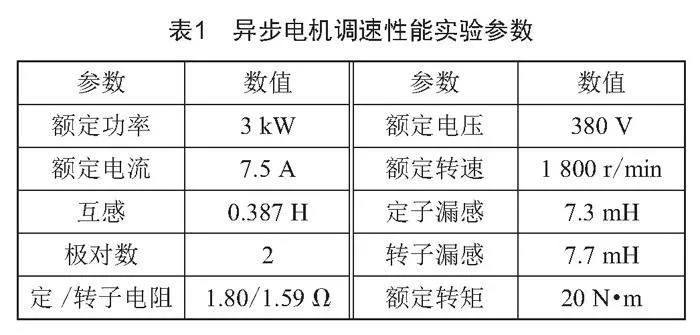
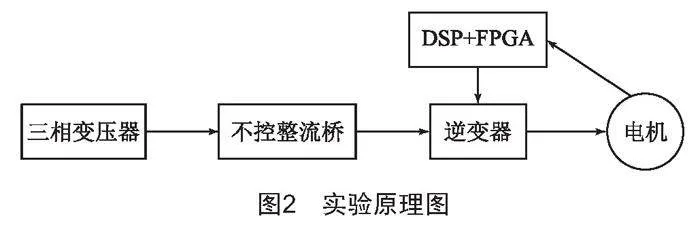
采用基于DSP和FPGA的控制器來(lái)進(jìn)行異步電機(jī)矢量調(diào)速實(shí)驗(yàn),交-直-交主電路為:三相自耦調(diào)壓器的輸出接到三相不控整流裝置,整流后通過(guò)一個(gè)電容進(jìn)行穩(wěn)壓給逆變器供電,由DSP控制逆變器的驅(qū)動(dòng)信號(hào),逆變輸出的三相交流電和異步電機(jī)的三相定子繞組相連,原理圖如圖2所示。電機(jī)具體參數(shù)如表1所示。
當(dāng)采用傳統(tǒng)PI調(diào)節(jié)器時(shí),速度響應(yīng)具有很大的超調(diào)量,達(dá)到60%,系統(tǒng)需要7.5 s達(dá)到穩(wěn)定,穩(wěn)定性差且抗干擾能力弱,如圖3所示;當(dāng)采用AW控制器和DOB復(fù)合優(yōu)化的PI調(diào)節(jié)器時(shí),參考轉(zhuǎn)速得到完美優(yōu)化,反饋轉(zhuǎn)速的超調(diào)量下降到25%,穩(wěn)定時(shí)間僅需2 s,抗干擾能力較強(qiáng),如圖4所示。
4 結(jié)論
在異步電機(jī)矢量控制調(diào)速系統(tǒng)中,為抑制積分飽和現(xiàn)象和消除干擾,設(shè)計(jì)了一種由AW和DOB復(fù)合優(yōu)化的傳統(tǒng)PI調(diào)節(jié)器。實(shí)驗(yàn)表明,該P(yáng)I調(diào)節(jié)器能夠減少系統(tǒng)速度響應(yīng)的超調(diào)量,縮短系統(tǒng)穩(wěn)定的時(shí)間,有較強(qiáng)的抗干擾能力。在所設(shè)計(jì)的PI調(diào)節(jié)器控制下,異步電機(jī)的速度環(huán)能實(shí)現(xiàn)較好的跟蹤,且跟蹤誤差小,使系統(tǒng)性能得到了優(yōu)化。所設(shè)計(jì)的PI調(diào)節(jié)器可以用于其他應(yīng)用的閉環(huán)控制環(huán)節(jié),使用領(lǐng)域廣泛。
[參考文獻(xiàn)]
[1] 苗敬利,李啟蒙.新型Anti-Windup PI控制器在感應(yīng)電機(jī)DTC系統(tǒng)中的應(yīng)用[J].微特電機(jī),2023,41(12):47-50.
[2] 劉燦,丁學(xué)明,唐柱.異步電機(jī)矢量控制系統(tǒng)性能優(yōu)化及仿真分析[J].計(jì)算機(jī)仿真,2013,30(4):308-312.
[3] 周華偉,溫旭輝,趙峰,等.一種具有預(yù)測(cè)功能的抗積分飽和器和PI速度控制器[J].電機(jī)與控制學(xué)報(bào),2012,16(3):15-21.
[4] 李華,陳良.非線性系統(tǒng)的線性定常擾動(dòng)觀測(cè)器前饋控制[J].控制工程,2013,20(6):1037-1041.
[5] 程麗敏,李興源.基于擾動(dòng)觀測(cè)器的電壓源型逆變器控制[J].電工技術(shù)學(xué)報(bào),2011,26(8):113-118.
[6] 張小華,劉慧賢,丁世宏,等.基于擾動(dòng)觀測(cè)器和有限時(shí)間控制的永磁同步電機(jī)調(diào)速系統(tǒng)[J].控制與決策,2009,24(7):1028-1032.
[7] 馮曉云.電力牽引交流傳動(dòng)及其控制系統(tǒng)[M].北京:高等教育出版社,2009.
[8] 趙希梅,郭慶鼎.基于擾動(dòng)觀測(cè)器和重復(fù)控制器的永磁直線同步電動(dòng)機(jī)魯棒控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(15):64-69.
[9] 李嘉全,丁策,孔德杰,等.基于速度信號(hào)的擾動(dòng)觀測(cè)器及在光電穩(wěn)定平臺(tái)的應(yīng)用[J].光學(xué)精密工程,2011,19(5):998-1004.
[10] 劉穎,周波,方斯琛.基于新型擾動(dòng)觀測(cè)器的永磁同步電機(jī)滑模控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(9):80-85.
收稿日期:2024-05-07
作者簡(jiǎn)介:陳秉禎(1991—),男,江蘇鎮(zhèn)江人,碩士研究生,講師,研究方向:城軌供配電。
基金項(xiàng)目:南京鐵道職業(yè)技術(shù)學(xué)院校青年基金Yq220013項(xiàng)目支持