交通錐雙撥齒輪投放裝置協同控制技術研究
2024-09-26 00:00:00郭柏甫趙書祥
機電信息 2024年16期
摘要:介紹了一種全新的交通錐自動布放工程車的布放模式及其核心工作部件雙撥齒輪投放裝置,基于這種雙撥齒輪投放裝置的作業要求,分析了其作業特點、作業過程及作業關鍵控制點,在此基礎上設計了雙撥齒輪的伺服驅動系統及相關的硬件配置方案,并詳細闡述了如何實現雙撥齒輪的主從驅動、原點標定、動態協同控制、交通錐自動投放間距控制,并提出了異常工況的預防措施等。
關鍵詞:交通錐布放工程車;雙撥齒輪;協同控制
中圖分類號:TP29" " 文獻標志碼:A" " 文章編號:1671-0797(2024)16-0085-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.16.023
0" " 引言
近年來,高速公路養護行業面臨著人工成本上漲、安全事故頻發、施工效率低下等問題,為解決這些問題,各項相關業務都在尋求合適的“機器換人”方案。在交通錐布放作業領域,當前大部分還是采用人工或半自動作業方式,僅有極少量的交通錐全自動收放工程車在使用,由于作業速度慢、設備可靠性差、成本較高、操控復雜等方面的原因,這些全自動設備也還未被廣泛使用。
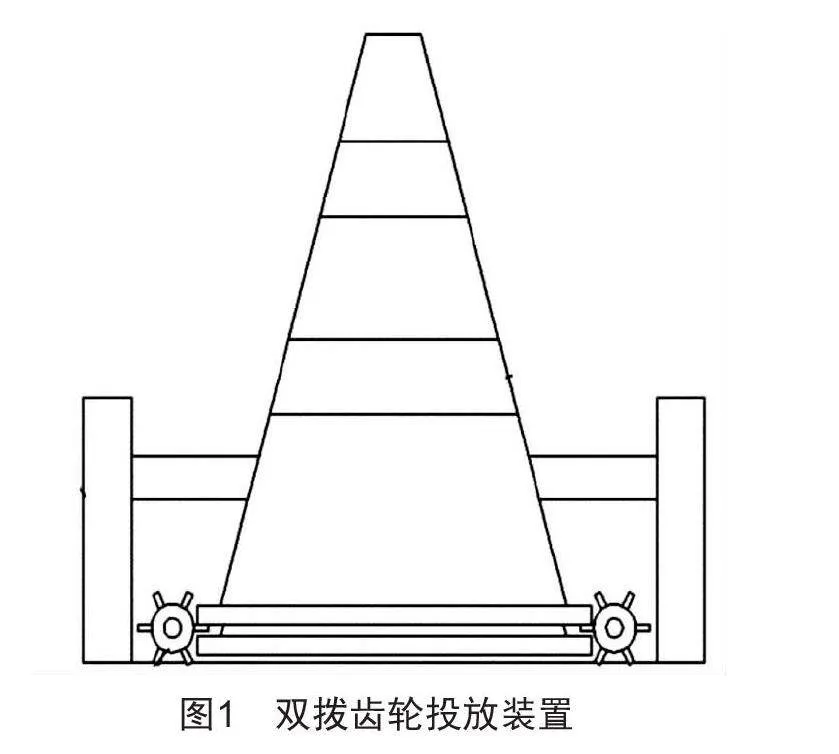
針對這些痛點,開發了一種全自動交通錐布放工程車,投放速度最高可達10 km/h(4 m間隔),一鍵啟動后的投放過程完全自動控制,無須人工干預。其核心部分是雙撥齒輪投放裝置,主要包括兩個撥齒輪,二者結構及尺寸完全一樣,兩個撥齒輪的軸平行放置,每個撥齒輪共有6個撥齒,每個撥齒之間的角度為60°,如圖1所示。
兩個撥齒輪的撥齒共同托舉一摞交通錐,當兩個撥齒輪同步向內旋轉60°,則放置一個交通錐至地面,同時下一個交通錐被雙撥齒輪的下一組撥齒托舉,如此往復,能夠實現交通錐的連續放置。一摞錐筒最多可達20個,工程車前后各設置一個這種投放裝置,交替放錐,可使放錐速度得到極大的提高。
1" " 控制功能分析
雙撥齒輪投放裝置能夠順利將其承載的交通錐逐一撥投至地面的首要前提是兩個撥齒輪的動作能夠同步,否則其承載的交通錐會出現偏置甚至卡滯,無法順利布放。具體要求為兩個撥齒輪旋轉方向相反、旋轉角度相同。在工業控制中,常用的同步控制方法有三種:第一種是在兩個撥齒輪的軸上安裝編碼器進行位置檢測,兩個撥齒輪分別由兩個電機來驅動,通過同步算法,實現兩個撥齒輪的同步運轉[1];第二種是其中一個撥齒輪由一個電機驅動,該撥齒輪通過兩個同步齒輪將旋轉動作傳遞至另一個撥齒輪,通過機械的方式來實現兩個撥齒輪的同步動作;第三種是采用主從控制方式,即兩個撥齒輪分別由兩個電機獨立驅動,其中一個撥齒輪作為主機,其旋轉的方向和速度通過電氣傳輸至從機,從機驅動另一個撥齒輪動作,從而實現兩個電機的同步運動。三種方法各有優缺點,適用于不同應用場景,根據具體工況可以擇優選擇,本文采用主從驅動方法來實現協同控制。
其次,在高速公路上布放交通錐時要做到錐筒放置間距均勻、準確,這樣才能對施工區域和行車區域進行有效隔離。這就要求在布放交通錐過程中要精確控制雙撥齒輪投放交通錐的時間,進而才能準確控制交通錐落地后的間距。由于在車輛作業時車速可能出現不同程度的波動,為了準確控制放置交通錐的間距,則投放交通錐的節奏必須與車輛速度聯動。
最后,當前的全自動交通錐布放作業設備在應用中遇到的一個瓶頸問題就是其可靠性和穩定性不足,導致終端用戶叫好不叫座,因此如何提高裝置的魯棒性并建立較強的容錯機制也是這類全自動設備面臨的一個主要課題。
2" " 雙撥齒輪協同控制
2.1" " 硬件設計
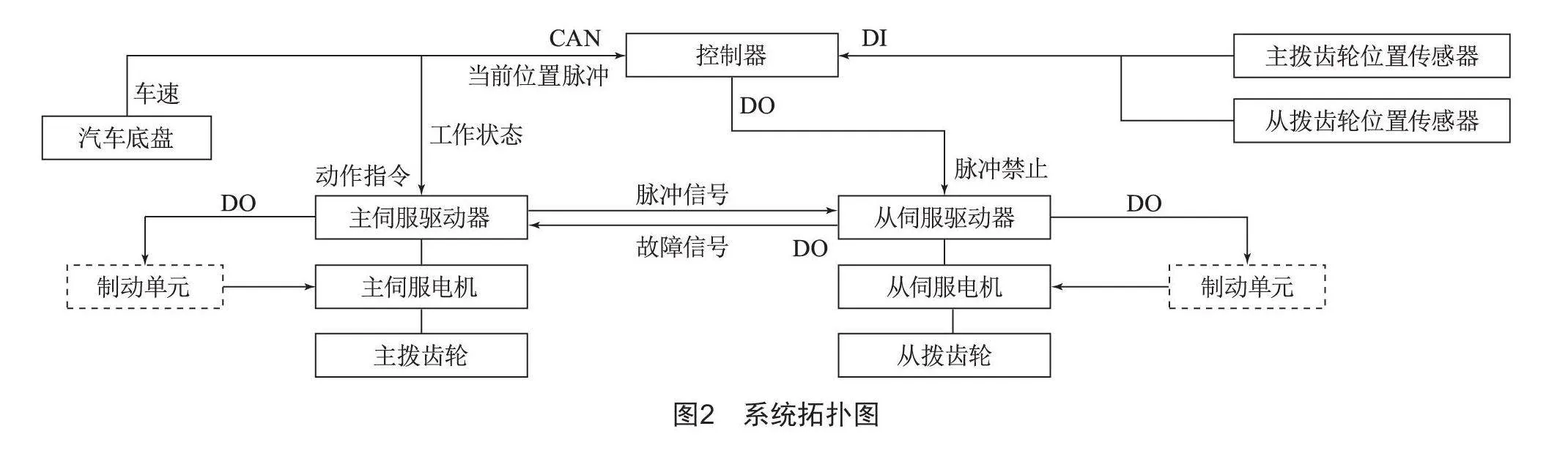
綜合考慮成本、安裝空間、速度、定位準確性,優選在工業控制領域廣泛應用的伺服驅動系統作為雙撥齒輪的驅動裝置。每個撥齒輪采用一個伺服電機來驅動,伺服電機配置有增量型編碼器和電磁制動單元,每個伺服電機由其各自的伺服驅動器驅動,伺服驅動器支持CAN總線控制功能;控制器作為雙撥齒輪動作控制的核心,通過CAN總線向主伺服驅動器發送動作指令,同時主伺服電機運轉的狀態也通過總線反饋給控制器,從機驅動器與控制器僅通過IO端口連接,不進行總線通信[2];主伺服驅動器還同步將主撥齒輪的位置通過脈沖端口發送給從伺服驅動器,從伺服驅動器執行跟隨動作。系統拓撲圖如圖2所示。
2.2" " 靜態標定
兩個撥齒輪在放置錐筒過程中要求時刻保持角度、速度的同步,而且承載交通錐的兩個撥齒在投放前就必須處于水平位置,所以在正式投放錐筒之前就要對兩個撥齒輪的初始位置進行標定。為此,在每個撥齒輪的一個撥齒前方各設置一個位置檢測傳感器,用來標定各個撥齒輪的初始位置,要求當承載交通錐的撥齒處于水平位置時,撥齒正對著這個位置檢測傳感器。
標定時,首先由控制器發送動作指令至主伺服驅動器,動作指令正好保證撥齒輪旋轉一圈,當主電機帶動主撥齒輪旋轉時,從伺服驅動器此時沒有收到控制器發送的脈沖禁止指令,所以從伺服電機會帶動從撥齒跟隨主機旋轉。當從撥齒觸發位置檢測傳感器時,記錄下主伺服驅動器發送給控制器的當前位置脈沖數,將這個位置脈沖數作為從撥齒輪的原點,并由主機驅動從機旋轉至從機的原點位置。接著,控制器通過DO端口給從伺服驅動器發送脈沖禁止指令,之后控制器繼續發送動作指令至主伺服驅動器,動作指令正好保證主撥齒輪旋轉一圈。當主電機驅動主撥齒輪旋轉時,從撥齒輪由于受到脈沖禁止指令會始終靜止不動,當主撥齒輪觸發其位置檢測傳感器時,記錄下主伺服驅動器發送給控制器的當前位置脈沖數,將這個位置脈沖數作為主撥齒輪的原點,然后驅動主撥齒輪旋轉至其原點位置。至此,主從撥齒輪都已經處于準確的原點位置,后續動作過程中只要時刻保持兩個撥齒輪同步動作即可。
2.3" " 動態協同
當雙撥齒輪執行完靜態標定且兩個撥齒輪都處于其原點位置后,可以驅動車輛配置的輔助裝置將一摞交通錐轉運至雙撥齒輪上,由雙撥齒輪承載這一摞交通錐,至此就完成了交通錐放置前的準備工作,可以開始放置交通錐。放置時,首先由控制器發送向內旋轉指令給主伺服驅動器,即60°對應的脈沖數,一旦主伺服電機開始旋轉,主伺服驅動器將實時發送其位置脈沖給從伺服驅動器,從伺服驅動器接收到脈沖后,實時跟隨主機的速度和位置,這樣主撥齒輪和從撥齒輪就實現了同步向內旋轉動作,其承載的第一個交通錐則失去了兩個撥齒的支撐,在重力作用下自由下落至地面。在這個過程中,從撥齒輪滯后于主機的時間僅僅是主機驅動器發送其脈沖給從機驅動器的信號傳輸和解析時間,理論上該時間長度應為毫秒級,不會導致撥齒輪上承載的交通錐在放置過程中發生不可接受的偏置,而且最終從撥齒輪旋轉的角度會與主撥齒輪保持一致。
另外,為控制兩個相鄰交通錐在地面上的距離,需要準確控制雙撥齒輪旋轉的時間間隔,而控制上述時間間隔的原則是計算車輛在放置前一個交通錐后所行駛的距離大于或等于設置值。為準確計算該距離,控制器會通過總線實時獲取汽車底盤ECU發送的車輛速度,并對車輛速度進行積分計算,當計算出車輛當前位置距離上一個已放置的交通錐的距離達到設定值時,再次驅動雙撥齒輪向內旋轉60°,放置第二個交通錐至地面,如此循環,直至雙撥齒輪承載的交通錐放置完畢。
控制器通過ECU獲取的車速肯定滯后于實際車速,這就導致交通錐放置間隔與設置值會存在差異,尤其是當車輛行駛速度不穩定時,這時交通錐間距也會出現明顯不均勻的現象。為了解決該問題,可以從三個方面進行處理:首先是可以提高控制器接收車速信息的周期和精度,從而進一步縮小因車速滯后導致的間隔偏差;其次是在對車輛行駛距離進行積分運算時,對該距離進行補償,補償的數值可以是ECU通過總線發送車速報文的周期內車輛行駛的距離,通過補償后控制器計算的車輛行駛距離進一步逼近真實值;最后,剩下的誤差是由ECU發送的車速偏差導致的,這可以通過對ECU發送至總線的車速進行標定來解決。
2.4" " 異常工況處理
經過上述的靜態標定和動態協同控制后,投放裝置的全自動放錐功能基本得到實現。但在投放交通錐的過程中,不可避免地會出現一些異常工況,這些工況會嚴重影響雙撥齒輪的同步性,給施工過程帶來極大的不便。
一種情況是,在放置交通錐的過程中,系統突然斷電,雙撥齒輪的驅動電機突然失去電磁力,但雙撥齒輪上還有交通錐未放置完畢,此時雙撥齒輪在交通錐重力作用下旋轉,導致交通錐落地,撥齒輪也不再同步。為解決該問題,特在每個電機上設置一套電磁制動單元。每次伺服驅動器通電使能時,同時給制動單元通電,將制動裝置釋放,此時電機轉子受電磁力的控制處于零速鎖定狀態,只有當控制器發送旋轉指令時,電機轉子才會動作;當伺服驅動器斷電時,電機轉子失去電磁力的控制,同時必須切斷制動單元的供電,使制動裝置抱死,電機轉子受制動裝置控制,也不會產生旋轉,從而確保在兩個撥齒輪初始位置一致的情況下,運行過程中從撥齒輪會實時跟隨主撥齒輪旋轉,斷電后也將保持斷電前的位置不變,直至下一次通電后控制器發送動作指令給主伺服驅動器,這樣就實現了雙撥齒輪的電氣同步控制。
另一種情況是,在協同動作的過程中,從伺服驅動器檢測到異常,從伺服電機被鎖定,這時從伺服驅動器無法有效執行主伺服驅動器發送的動作指令,導致主伺服電機驅動撥齒輪動作時,從撥齒不動作,雙撥齒輪的旋轉動作不再同步。這個時候雙撥齒輪承載的交通錐會出現嚴重偏載的現象,主撥齒側的交通錐底座被主撥齒旋轉撥動至撥齒下方,而從撥齒側的交通錐底座因從撥齒輪被鎖定無法動作仍然被從撥齒承載,此時放錐過程已經無法順利進行,還給后期的錐筒姿態恢復處理帶來極大的困難。針對這種情況,將從伺服驅動器的故障信號從其數字輸出端口輸出至主伺服驅動器的數字輸入端口,并將主伺服驅動器該輸入端口的功能配置為急停,這樣在從伺服出現故障并鎖定后,從伺服驅動器通過數字輸出端口將故障信號發送至主伺服驅動器的數字輸入端口,主伺服驅動器檢測到該信號后立即緊急停機,不再執行控制器發送的旋轉指令,此時主從撥齒輪仍然處于同步狀態,同時由主伺服將故障信號上報至控制器,進行系統的聯鎖停機和故障報警[3]。
3" " 實驗結果
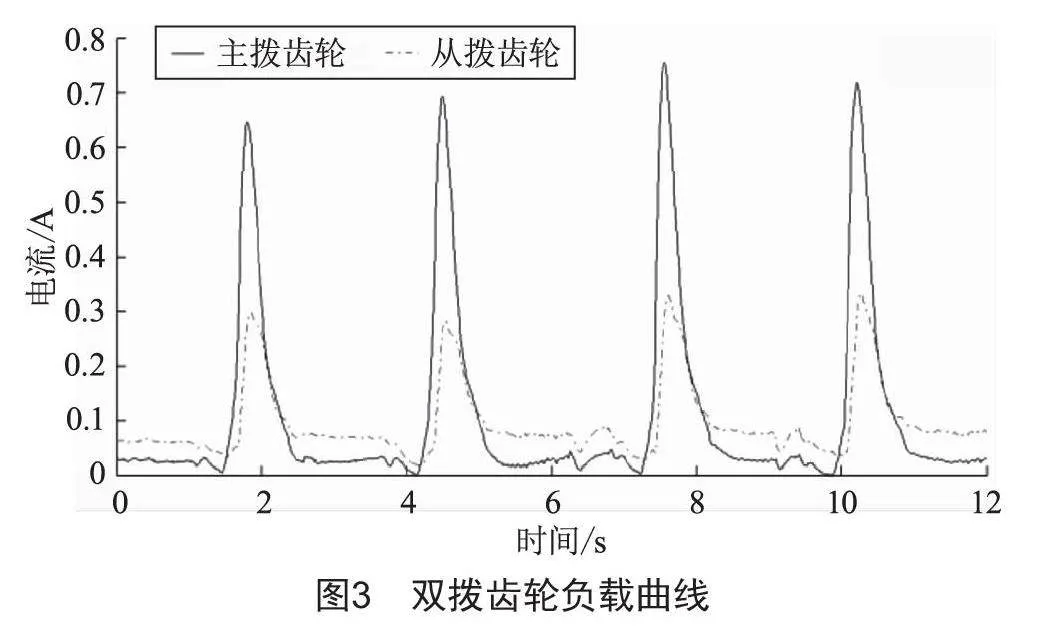
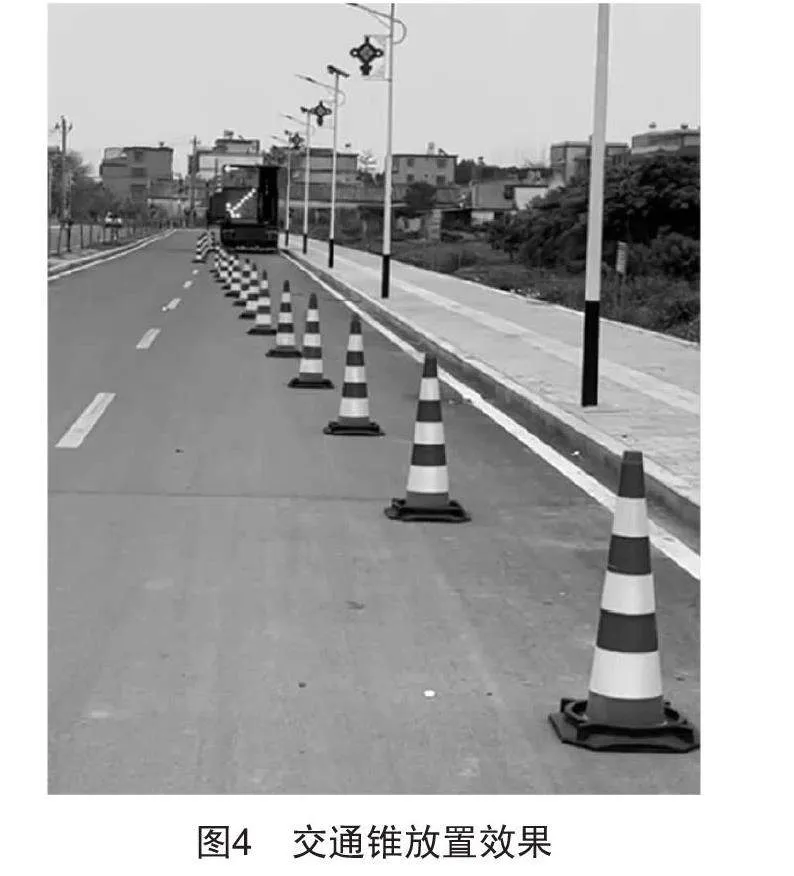
上述對雙撥齒輪控制系統的設計實施后,經過反復調校,進行交通錐放置實驗。實驗條件:放錐間隔設置為4 m,放錐長度400 m,放錐過程中施工車輛開啟定速巡航模式,定速5 km/h,并在實驗過程中利用數據采集儀實時監測雙撥齒輪兩個伺服電機的負載情況。根據電流變化的前后時間差異數據得出從撥齒輪滯后時間平均約為50 ms,從撥齒輪滯后主撥齒輪的最大角度約為4°,圖3為節選的一段雙撥齒輪伺服電機負載曲線圖。放置至地面的錐筒間隔實測平均值為3.97 m,標準差為0.074 m,放錐效果如圖4所示。
從實際測試效果來看,該方案的雙撥齒輪同步性能良好,放錐間距均勻準確,具有較好的實用性。
[參考文獻]
[1] 李勝光,張冠,李來,等.伺服同步控制及其應用淺析[J].鍛壓裝備與制造技術,2023,58(4):79-82.
[2] 劉艷行,張小玲,李文強.一種基于CAN總線的雙軸同步控制系統設計[J].中國科技信息,2023(1):42-44.
[3] 宋科,曹建福,譚亞麗.大型龍門式包裝機雙軸同步控制技術研究及應用[J].現代制造工程,2020(8):147-153.
收稿日期:2024-04-22
作者簡介:郭柏甫(1987—),男,四川蒼溪人,工程師,主要從事道路養護施工工藝研究及養護裝備開發工作。