一類永磁同步電機混沌運動的GWO-RBFNN雙參協同智能優化控制
2024-09-28 00:00:00李寧洲邱思旋衛曉娟李小齊李高嵩
哈爾濱理工大學學報 2024年3期
摘 要:針對永磁同步電機(permanent magnet synchronous motor,PMSM)混沌控制問題,提出了一種基于GWO-RBFNN的雙參協同智能優化控制方法。從控制器能夠自動搜索預期運動狀態的角度出發,選擇Poincaré截面上兩點間距離作為控制器輸入,并考慮到系統參數對系統動力學行為的耦合影響作用,基于徑向基函數神經網絡(radial basis function neural network,RBFNN)設計了雙參協同控制器;采用灰狼優化算法(grey wolf optimization,GWO)優化選擇控制器參數,以實現最佳的控制器性能;通過對PMSM系統中兩個可控參數進行微幅擾動調整,將系統從混沌狀態控制到預期的運動狀態。研究結果表明,相較于基于GWO-RBFNN的單參數智能優化控制方法,基于GWO-RBFNN的雙參協同智能優化控制方法具有更優的性能。雖然兩種方法均能實現混沌運動控制,但相較而言,基于GWO-RBFNN的雙參協同智能優化控制方法控制速度更快,超調量更小。
關鍵詞:永磁同步電機;混沌運動;雙參協同控制;灰狼算法;徑向基函數神經網絡
DOI:10.15938/j.jhust.2024.03.004
中圖分類號: TP183
文獻標志碼: A
文章編號: 1007-2683(2024)03-0028-09
GWO-RBFNN Dual-parameter Collaborative Intelligent Optimal Control of
Chaotic Motion of a Class of Permanent Magnet Synchronous Motor
LI Ningzhou, QIU Sixuan, WEI Xiaojuan, LI Xiaoqi, LI Gaosong
(School of Rail Transportation, Shanghai Institute of Technology, Shanghai 201418, China)
Abstract:Aiming at the chaos control of permanent magnet synchronous motor, a dual-parameter collaborative intelligent optimal control method based on GWO-RBFNN was proposed. Starting from the perspective that the controller can automatically search for the expected motion state, the distance between two points on the Poincaré cross section is selected as the controller input. And considering the coupling effect of system parameters on the dynamic behavior of the system, a dual-parameter cooperative controller is designed based on radial basis function neural network (RBFNN); Grey Wolf Optimization (GWO) algorithm is used to optimize and select controller parameters to achieve the best controller performance; The system is controlled from a chaotic state to the expected motion state by adjusting the two controllable parameters in the PMSM system with minor disturbances. The results show that compared with the single-parameter intelligent optimization control method based on GWO-RBFNN, the dual-parameter collaborative intelligent optimal control method based on GWO-RBFNN has better performance. Although both methods can achieve chaotic motion control, the control speed of the dual-parameter collaborative intelligent optimization control method based on GWO-RBFNN is faster and overshoot is smaller.
Keywords:permanent magnet synchronous motor; chaotic motion; dual-parameter cooperative control; grey wolf optimization;radial basis function neural network
0 引 言
永磁同步電機損耗小,功率因數高,效能高,在工業領域中得到廣泛運用[1-3]。但其是一個典型的非線性、多變量耦合系統,在特定參數下會引起電機表現出混沌行為[4-6],降低PMSM系統的運行質量。為消除電機中的混沌現象,許多研究人員相繼提出了相應的控制方法[7-12]。
既有的PMSM系統混沌控制方法有PID控制[13]、模糊控制[14]等。李洋洋等[15]設計了一種基于LMI算法的動態滑模補償混沌控制器,在滑模函數當中增加補償算法設置,利用LMI算法計算滑模控制律中待求矩陣的最優解,以實現混沌控制。Abolfazl等[16]提出了一種基于魯棒自適應的滑模控制方法,在控制方案的設計中考慮到了PMSM系統模型中參數不確定性,采用自適應方法估計不確定項、擾動項和非線性項的上界,有效實現了PMSM系統的混沌控制。雖然PMSM系統混沌控制研究,取得了一定的研究成果,但滑模控制抖振問題的存在影響了控制效果。謝東燊等[17]提出了一種解耦自適應滑模混沌控制方法,增設了自適應系統,相比于普通滑模控制器,在不依賴系統參數的情況下,可以更好的實現PMSM系統的混沌控制,且抑制了抖振現象。此外,控制器參數組合的優劣程度,也會影響混沌控制效果。近年來,研究者們針對PMSM混沌控制器的參數優化問題進行了相應探索和研究。黃俊豪等[18]通過建立PMLSM混沌模型,利用BPNN擬合滑模控制器參數,并經由PSO算法優化,確定最優控制參數,進而實現PMSM系統混沌控制。Zhang等[19]提出一種基于狀態反饋的模糊自適應非線性混沌控制方法,利用模糊邏輯來近似逼近PMSM系統的非線性項和干擾,同時,利用布谷鳥算法優化控制律,仿真結果表明,所提方法對PMSM系統混沌的快速抑制具有有效性。
雖然研究者們關于PMSM系統混沌控制問題取得了相應研究成果,但是,目前將智能優化算法與RBFNN相結合進行PMSM系統混沌控制的相應研究仍然鮮見,還需要進一步探索和深入;同時,對于PMSM系統雙參協同智能優化混沌控制方法暫時還沒有公開文獻報道。
既有的PMSM系統混沌控制方法,主要是針對系統的一個可控參數進行相應的控制,實現系統混沌的抑制。但是PMSM系統混沌現象的產生本身是一個多參數耦合作用的結果。據此,為了更好的實現PMSM系統的混沌運動控制,本文提出了一種基于GWO-RBFNN的永磁同步電機混沌運動雙參協同智能優化控制方法:基于RBFNN設計控制器,采用GWO算法優化控制器的參數(控制器的三類參數(Ci、σi、wi)對應于灰狼的位置矢量),選擇Poincaré截面上兩點間距離構建優化控制器參數所需的目標函數。在用GWO算法對控制器的參數進行全局優化的同時,利用RBFNN對PMSM系統的可控參數進行微幅調整,從而實現混沌控制。
1 系統動力學特性分析
1.1 PMSM系統模型
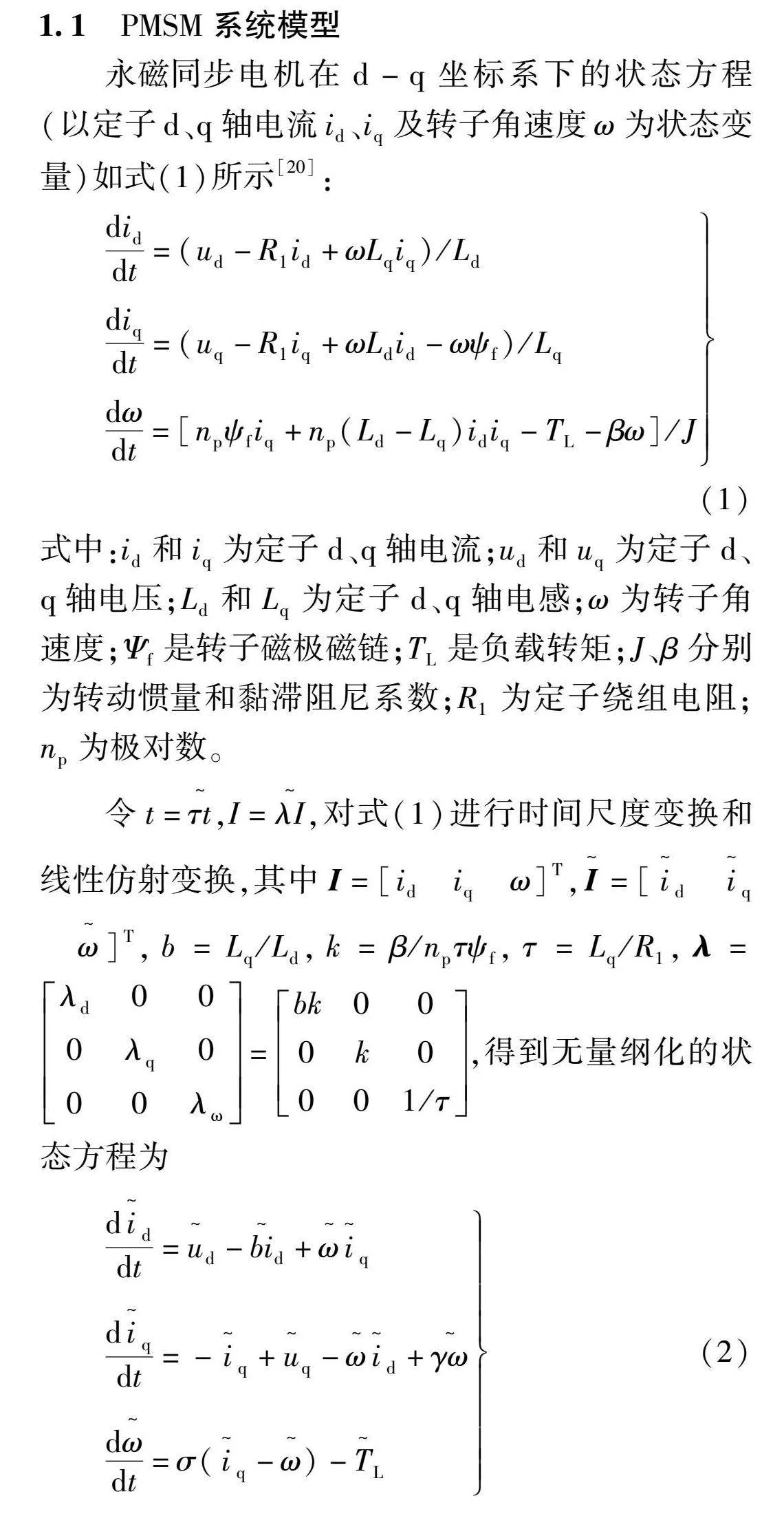
永磁同步電機在d-q坐標系下的狀態方程(以定子d、q軸電流id、iq及轉子角速度ω為狀態變量)如式(1)所示[20]:
diddt=(ud-R1id+ωLqiq)/Ld
diqdt=(uq-R1iq+ωLdid-ωψf)/Lq
dωdt=[npψfiq+np(Ld-Lq)idiq-TL-βω]/J(1)
式中:id和iq為定子d、q軸電流;ud和uq為定子d、q軸電壓;Ld和Lq為定子d、q軸電感;ω為轉子角速度;Ψf是轉子磁極磁鏈;TL是負載轉矩;J、β分別為轉動慣量和黏滯阻尼系數;R1為定子繞組電阻;np為極對數。
令t=τt~,I=λI~,對式(1)進行時間尺度變換和線性仿射變換,其中I=[id iq ω]T,I~=[i~d i~q ω~]T,b=Lq/Ld,k=β/npτψf,τ=Lq/R1,λ=λd000λq000λω=bk000k0001/τ,得到無量綱化的狀態方程為
di~ddt=u~d-bi~d+ω~i~q
di~qdt=-i~q+u~q-ω~i~d+γω~
dω~dt=σ(i~q-ω~)-T~L(2)
式中:γ=ψf/kLq,σ=βτ/J,u~d=ud/kR1,u~q=uq/kR1,T~=τ2TL/J。
本文主要針對均勻氣隙的永磁同步電動機的混沌特性進行研究,即考慮Ld=Lq=L的情況。當u~d=u~q=T~L=0時,令[x1 x2 x3]=[i~d i~q ω~],式(2)可等效為
1=-x1+x3x2
2=-x2-x1x3+γx3
3=σ(x2-x3)(3)
1.2 PMSM系統動力學分析
PMSM系統在斷電瞬間因參數變化而產生的混沌運動主要表現為轉速的劇烈振蕩,這有可能造成電機轉子的損傷從而影響系統性能。因此有必要研究并提出適用的控制策略以抑制PMSM系統的混沌運動。而對該系統動力學特性的分析則是實現有效混沌控制的基礎。
本文主要研究PMSM系統在氣隙均勻的環境下,突然斷電瞬間的動力學特性。
1.2.1 分岔圖
分岔圖是分析PMSM系統動力學情況的一種有效手段,它能夠描述PMSM系統隨分岔參數改變的工作狀態。
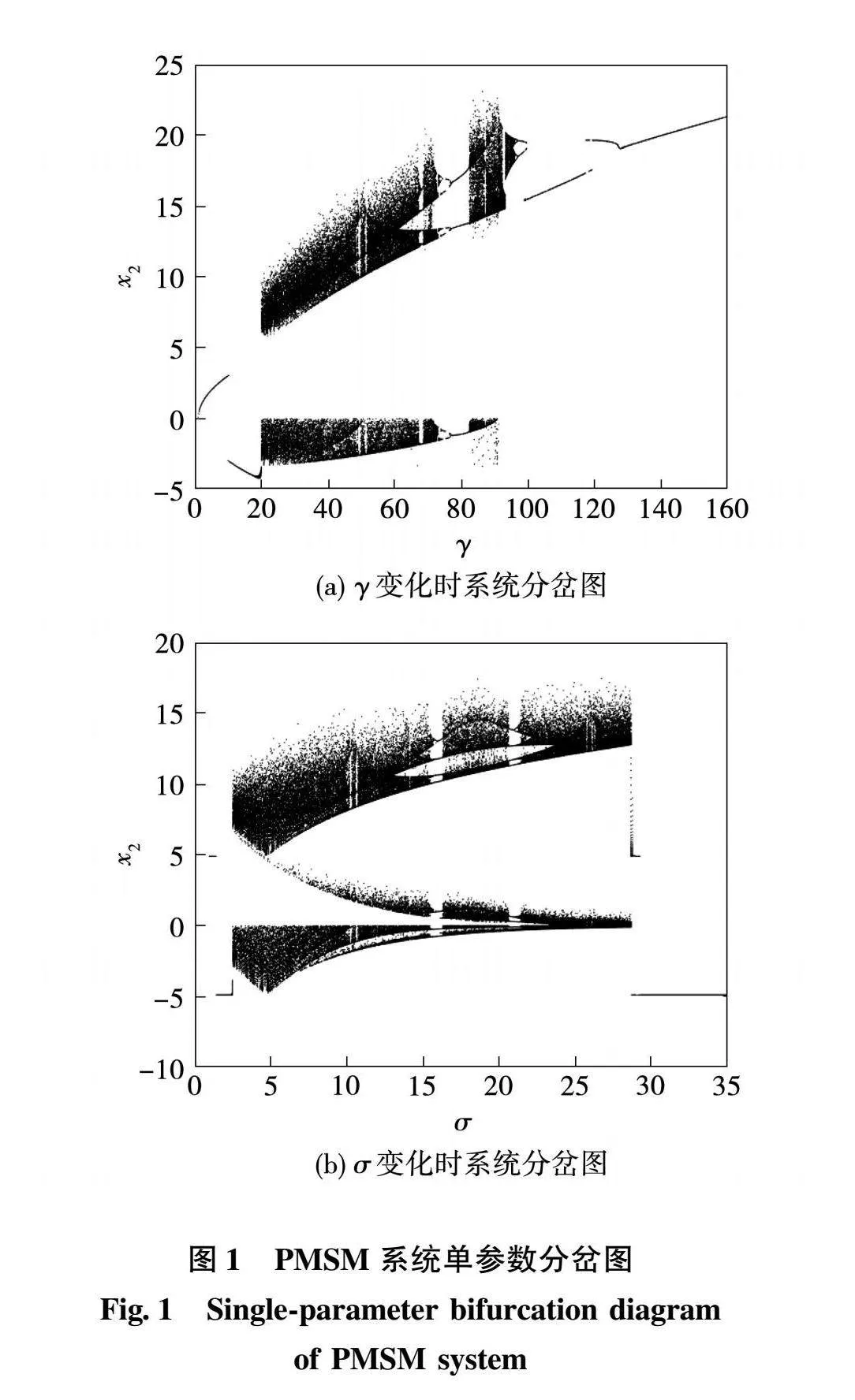
PMSM系統的參數γ和σ的變化都會引起系統工作狀態的改變。圖1所示為隨γ/σ變化,PMSM系統的分岔圖。其中,圖1(a)反映了γ變化時系統的分岔情況,圖1(b)反映了σ變化時系統的分岔情況。以圖1(a)所示γ變化時PMSM系統的工作狀態為例:當系統參數取σ=5.46,γ從0變化到160時系統會出現分岔現象;γ<1時,PMSM系統具有一個穩定的零平衡點;γ>1時,零平衡點不再穩定。γ∈[1,21)時,分離出兩個穩定的平衡點,系統的穩定狀態取決于初始狀態值的選擇。當選擇不同的初始狀態值時,系統會穩定到不同的狀態。隨著γ的增大,兩個非零平衡點會逐漸失去穩定性。當γ∈[21,71.6)的范圍內時,γ不斷變化的過程中,引發系統的Hopf分岔現象,隨著γ參數的繼續變化,系統將進入一種復雜的、似乎毫無規律的狀態,即混沌狀態。當γ∈[71.6,83)范圍內時,系統進入周期軌狀態;之后,系統再次進入混沌狀態。γ≥96后系統再次回到周期軌。
1.2.2 LYAPUNOV指數
Lyapunov指數譜是來判定非線性動力學系統是否穩定的重要指數。它是一種用于度量非線性動力學系統中相鄰兩條相軌線平均收斂程度的指標。在吸引域內,任意選擇一個點作為一條軌跡的起始點,通過模擬或者解析計算,得到從該起始點開始的軌跡。同時,在該起始點周圍選擇另一個點作為另一條軌跡的起始點,得到另一條軌跡的演化軌跡。如果軌道在初期軌跡非常相似,每次迭代所產生的距離變化將呈指數型增長,如果初始時刻的距離為d0,經過一次迭代后將變為
d0=d1exp(λ1)(4)
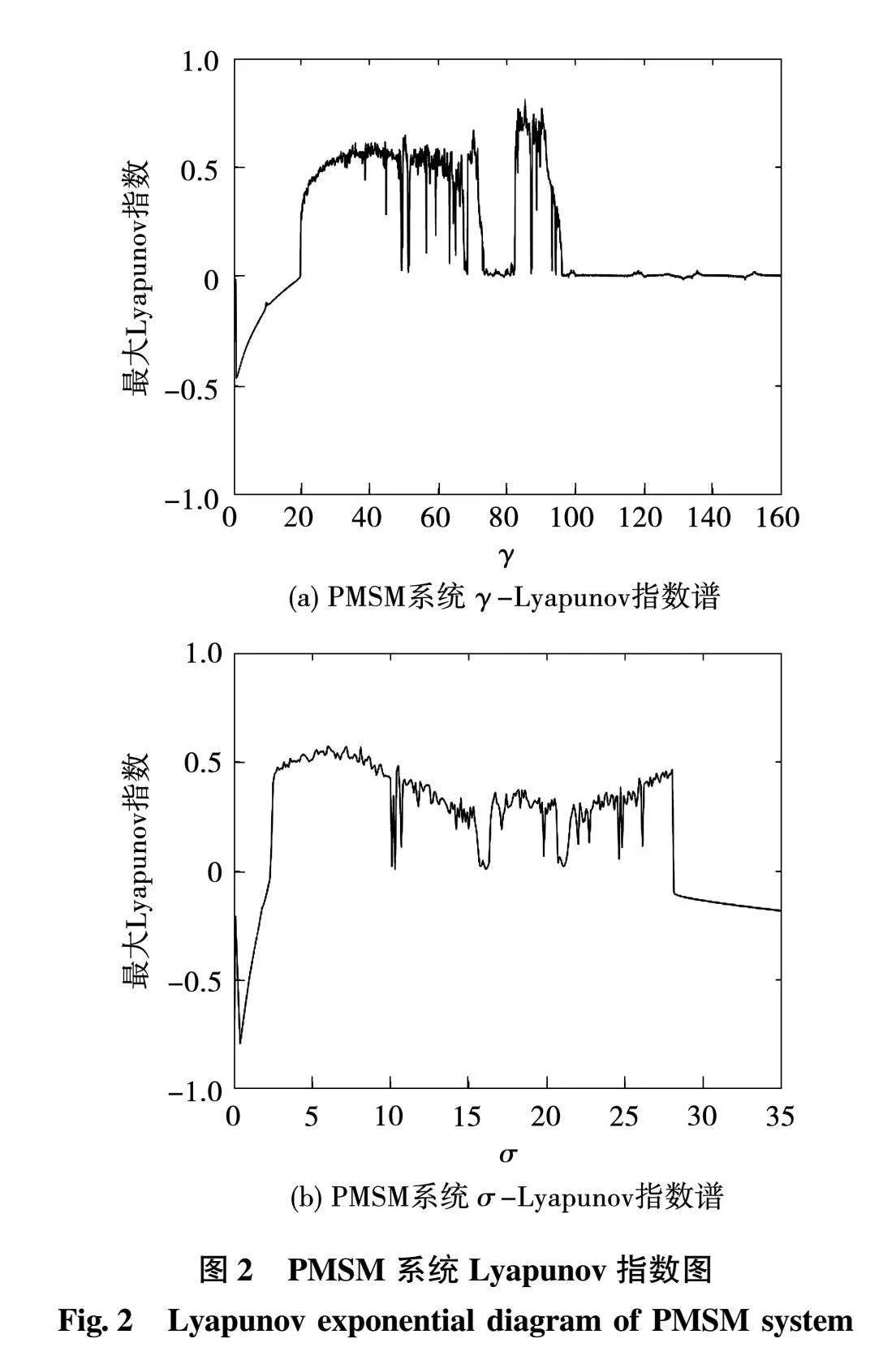
通過數值模擬得圖2所示PMSM系統的Lyapunov指數譜圖。其中,圖2(a)反映了γ變化時系統指數的變化情況,圖2(b)反映了σ變化時系統指數的變化情況。圖2中,黑色曲線是最大Lyapunov指數的變化曲線。
若PMSM系統的最大Lyapunov指數小于零,那么它將處于穩定的周期運動狀態。相反,如果PMSM系統的最大Lyapunov指數大于零,那么它將會轉入混沌運動狀態。通過數值模擬可得圖2,可以得到PMSM系統Lyapunov指數的整體變化趨勢。
不同的Lyapunov指數對應于不同的PMSM系統狀態,以γ變化時的狀態為例:從圖2(a)可以看出,γ∈[0,21)時最大Lyapunov指數為負,PMSM系統處于穩定狀態;γ∈[21,71.6)時最大Lyapunov指數為正,PMSM系統處于混沌狀態;γ∈[71.6,83)時最大Lyapunov指數為零,PMSM系統出現周期軌;而后PMSM系統重新進入混沌狀態;當γ≥96后PMSM系統進入周期軌狀態。表明了PMSM系統豐富的非線性特性。
1.2.3 POINCARé截面
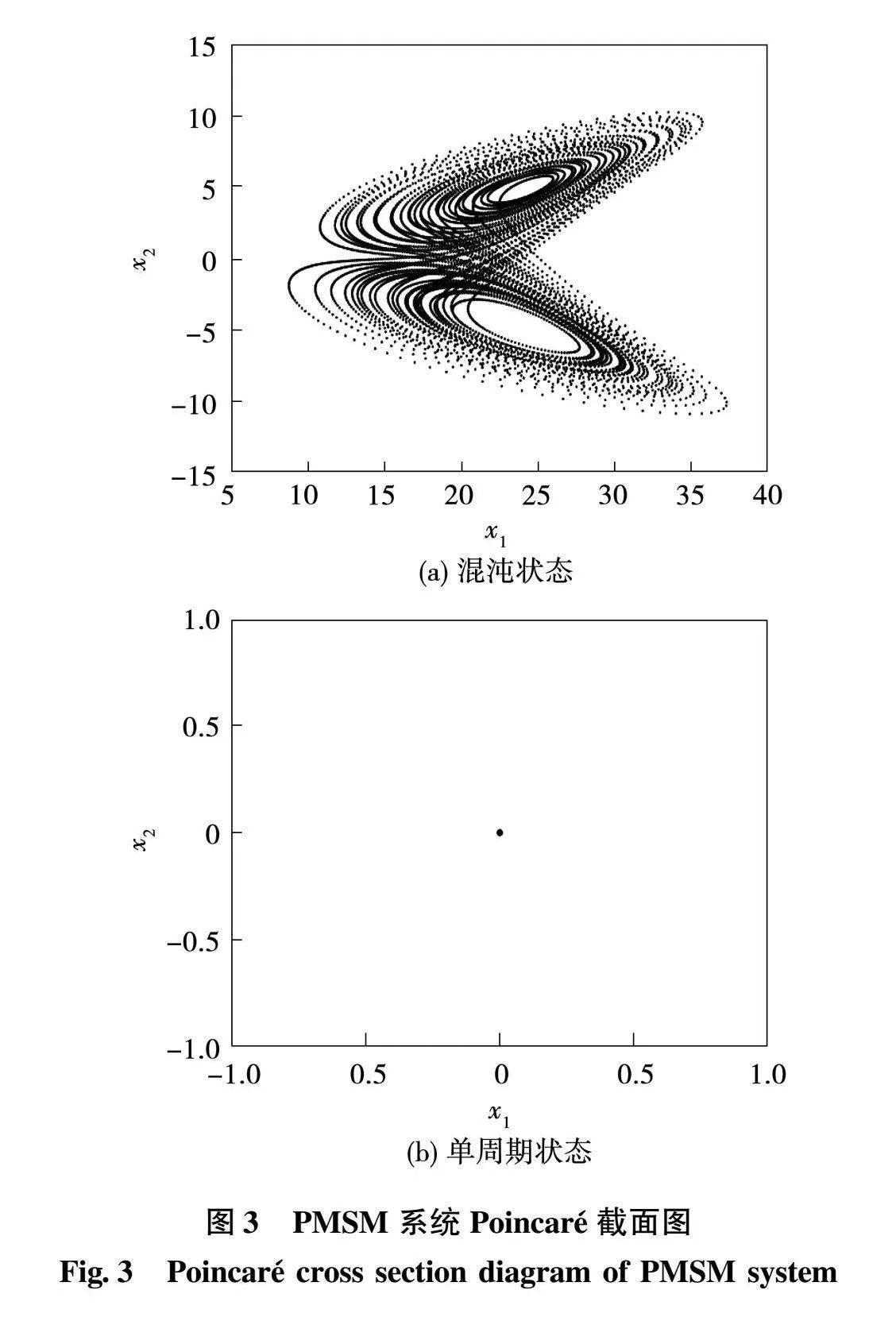
利用Poincaré截面法可以研究相空間內系統的運動軌跡:在相空間內引入一個截面,這個截面和動力系統的軌道相交,這個截面就是Poincaré截面;交點的變化規律可以反映出系統的動力學演化規律。本文基于時間Poincaré映射建立PMSM系統的Poincaré截面(即通過每隔一個周期時間T來選取Poincaré截面)。
分別取σ=5.46、γ=25,σ=5.46、γ=0.48,繪制PMSM系統的Poincaré截面圖,如圖3所示。從圖3可以看出,當Poincaré截面上有許多密集的點,這些點的分布呈現出無序、成片的特征,此時PMSM系統處于混沌狀態;亦或Poincaré截面上呈現單環的狀態,這種現象表明PMSM系統處于單周期狀態。Poincaré截面圖也證實了PMSM系統具有混沌特性。
2 GWO算法
GWO算法是一種基于灰狼群體行為的優化算法,并被應用于解決各種復雜的最優控制問題。在GWO算法中,灰狼群體中的每個個體代表問題的一個解,其實時位置可以被用來評估解的優劣性,并通過模擬灰狼的捕獵行為來更新位置。通過不斷地迭代和更新位置,GWO算法可以逐漸找到最優解。GWO算法中包含多個層次的灰狼個體,其中最底層的搜索狼被稱為z狼,數量為30只。在搜索過程中,每只搜索狼的位置都會被動態地更新,以更好地逼近最優解。同時,GWO算法還包含三只頭狼,分別被稱為αw、βw和δw狼,數量各為1只。這些頭狼的位置也會被更新,但更新頻率較低。當一只搜索狼的解優于某只頭狼的解時,它才有可能替代該頭狼的位置,成為新的頭狼。通過不斷地更新頭狼和搜索狼的位置。在GWO算法中,每次迭代后總是αw狼對應的最優解,而βw與δw狼代表的則是次優和再次優的解。因此,算法的性能取決于z狼(搜索狼)的更新方式。搜索狼z的位置更新公式如式(5):
dalfa=|C1Xalfa-Xw|
dbeta=|C2Xbeta-Xw|
ddelta=|C3Xdelta-Xw|
X1=Xalfa-A1dalfa
X2=Xbeta-A2dbeta
X3=Xdelta-A3ddelta
Xw(t+1)=X1+X2+X33(5)
αw、βw和δw狼的位置矢量分別用Xalfa,Xbeta和Xdelta來表示,在每次搜索過程中z狼的位置矢量為Xw,在下一次GWO算法搜索中,z狼的位置矢量被更新為Xw(t+1)。其中,A和C的計算公式如式(6):
A=2ar1-a
C=2r2(6)
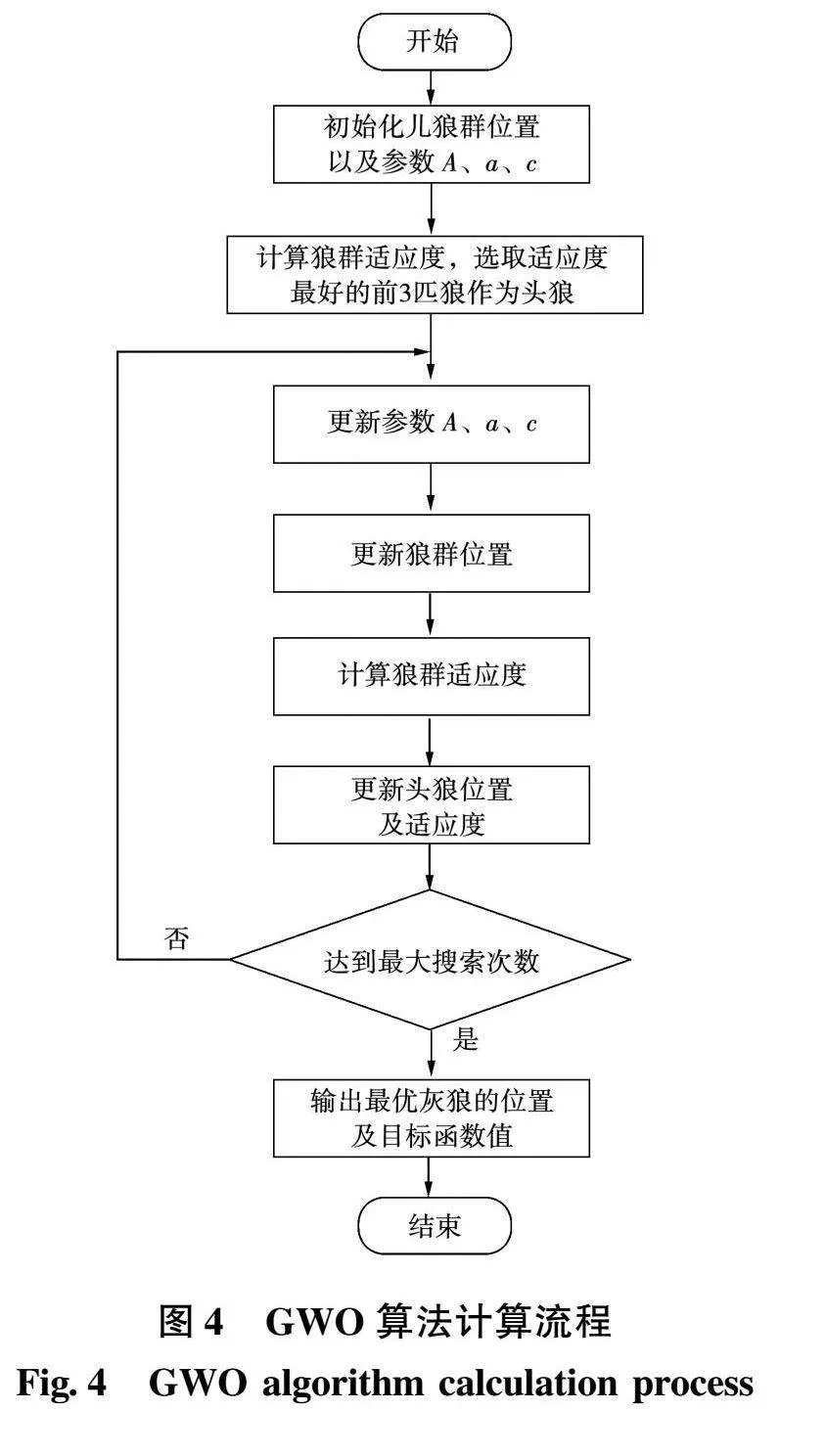
r1、r2的每個元素均是范圍為[0,1]的隨機值,參數a是一個逐漸減小的向量,其值從2到0隨著搜索次數的增加而減小。GWO算法計算流程如圖4所示。
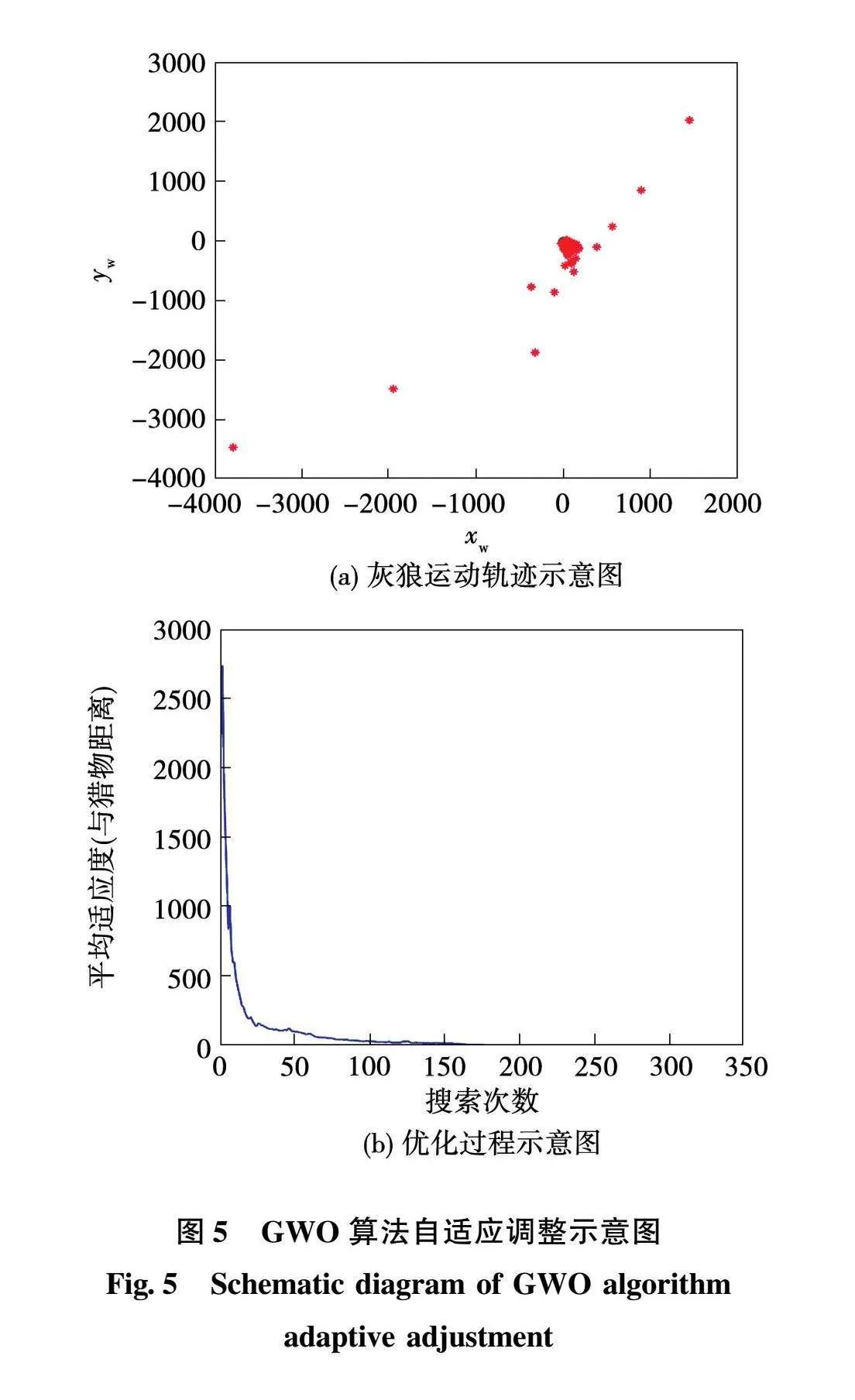
為測試GWO算法的搜索性能,特進行測試實驗,圖5為GWO算法自適應調整示意圖,在測試實驗中選取狼群目標位置為(0,0),狼群適應度函數為:Fitness=||X||,其中X=[xw,yw],(xw,yw)表示每次搜索后灰狼的更新位置。圖5(a)灰狼位置的快速收斂及圖5(b)平均適應度函數值的快速下降,體現了GWO算法搜索最優解的能力。
3 基于GWO-RBFNN的控制策略
3.1 基于RBFNN的雙參協同混沌控制器設計
從第一章的仿真分析結果可以看出,PMSM系統在一定的參數條件下會出現混沌行為,而這種混沌振蕩行為的出現會破壞PMSM系統的性能,必須加以控制。本文基于RBFNN設計雙參協同混沌控制器以消除PMSM系統中有害的混沌現象。使用控制器輸出微小的擾動量,施加于PMSM系統的可控參數——γ、σ,通過動態微調,將混沌運動穩定到期望的平衡點。針對式(3)模型,根據非線性系統反饋控制原理可設計控制器為u=[Δγ Δσ]T,則施加了控制的PMSM系統如式(7)所示:
1=-x1+x3x2
2=-x2-x1x3+(γ+Δγ)x3
3=(σ+Δσ)(x2-x3)(7)
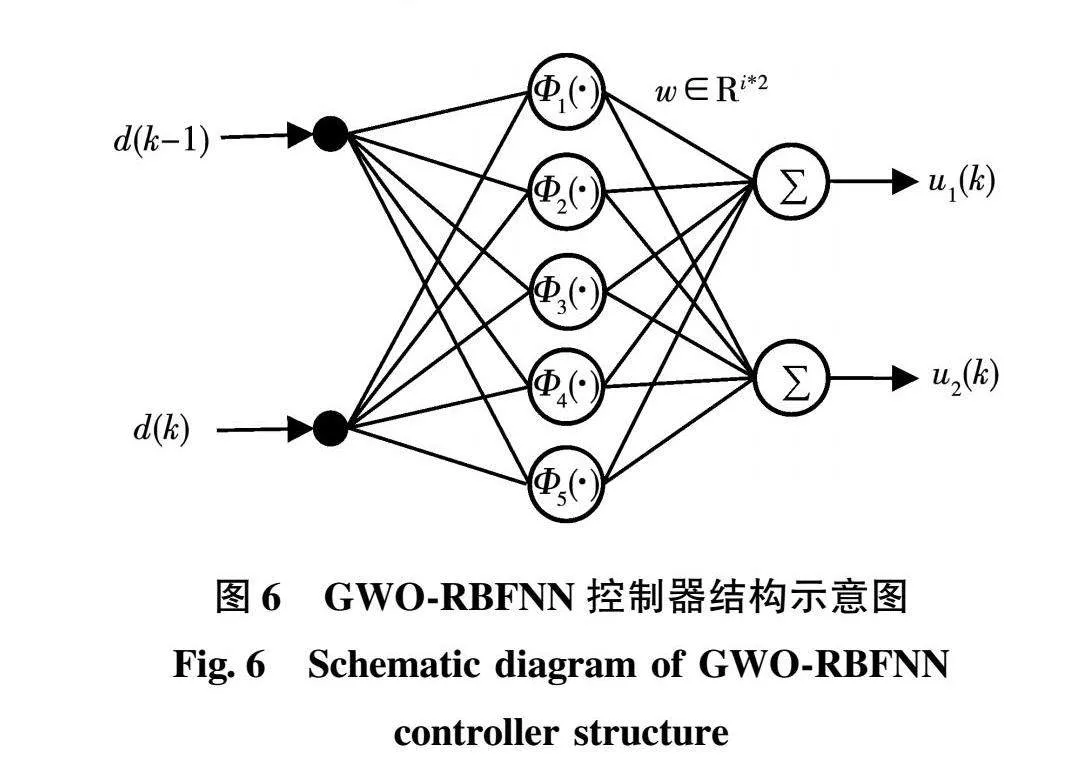
圖6為基于RBFNN設計的雙參協同混沌控制器結構。圖6中,RBFNN為三層結構,其中隱層有5個節點,輸出層有兩個節點;輸入層有兩個輸入:d(k)和d(k-1),它們表示PMSM系統的相軌跡在Poincaré截面上相鄰兩個投影點之間的距離,即
d(k)=‖X(k)-X(k-1)‖
d(k-1)=‖X(k-1)-X(k-2)‖(8)
X(k)是經過第k次迭代后被控系統測得的狀態變量X=[id iq ω]的值。
RBFNN隱層節點數的選取也會影響控制器對混沌運動的控制效果。隱層節點數太少,會導致控制器的非線性映射能力較弱,不能有效學習被控系統的非線性特性;而增加隱層節點雖然能增強控制器的非線性映射能力,但卻會增加控制器結構的復雜性,也使得待優化的控制器參數增多,從而加大GWO的搜索難度。因此,在滿足控制系統要求的前提下,應盡可能選取緊湊的控制器結構。本文在前期調研和團隊研究成果的基礎上,經過反復對比試驗,確定隱藏層節點數為5。
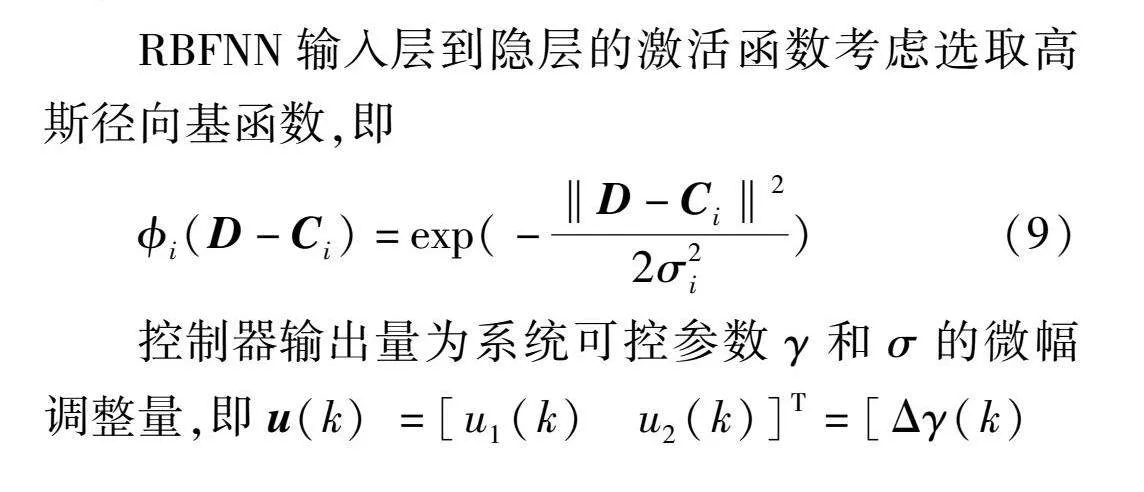
RBFNN輸入層到隱層的激活函數考慮選取高斯徑向基函數,即
i(D-Ci)=exp(-‖D-Ci‖22σ2i)(9)
控制器輸出量為系統可控參數γ和σ的微幅調整量,即u(k) =[u1(k) u2(k)]T=[Δγ(k) Δσ(k)]T,如式(10)所示:
u1(k)=∑5i=1wii(D,Ci)=
∑5i=1wiexp(-‖D-Ci‖22σ2i)=Δγ
u2(k)=∑5i=1wii(D,Ci)=
∑5i=1wiexp(-‖D-Ci‖22σ2i)=Δσ(10)
為保證控制結果的有效性,考慮設定控制器輸出的最大調整量為umax,則有-umax<u<umax。
3.2 基于灰狼優化算法(GWO)的控制器參數優化
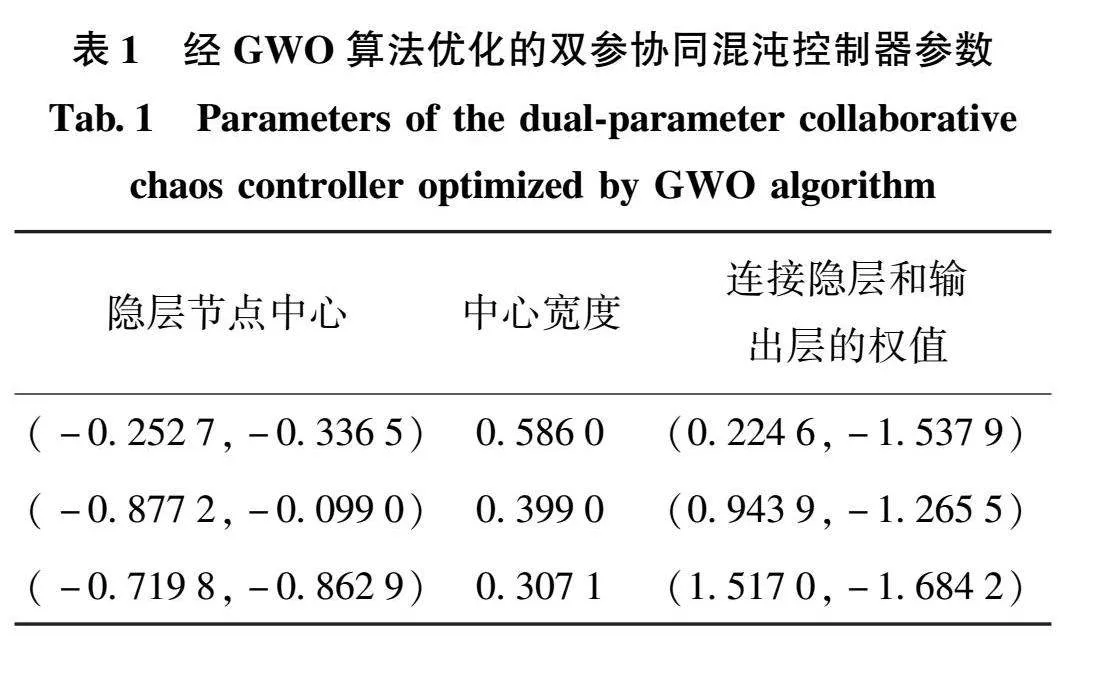
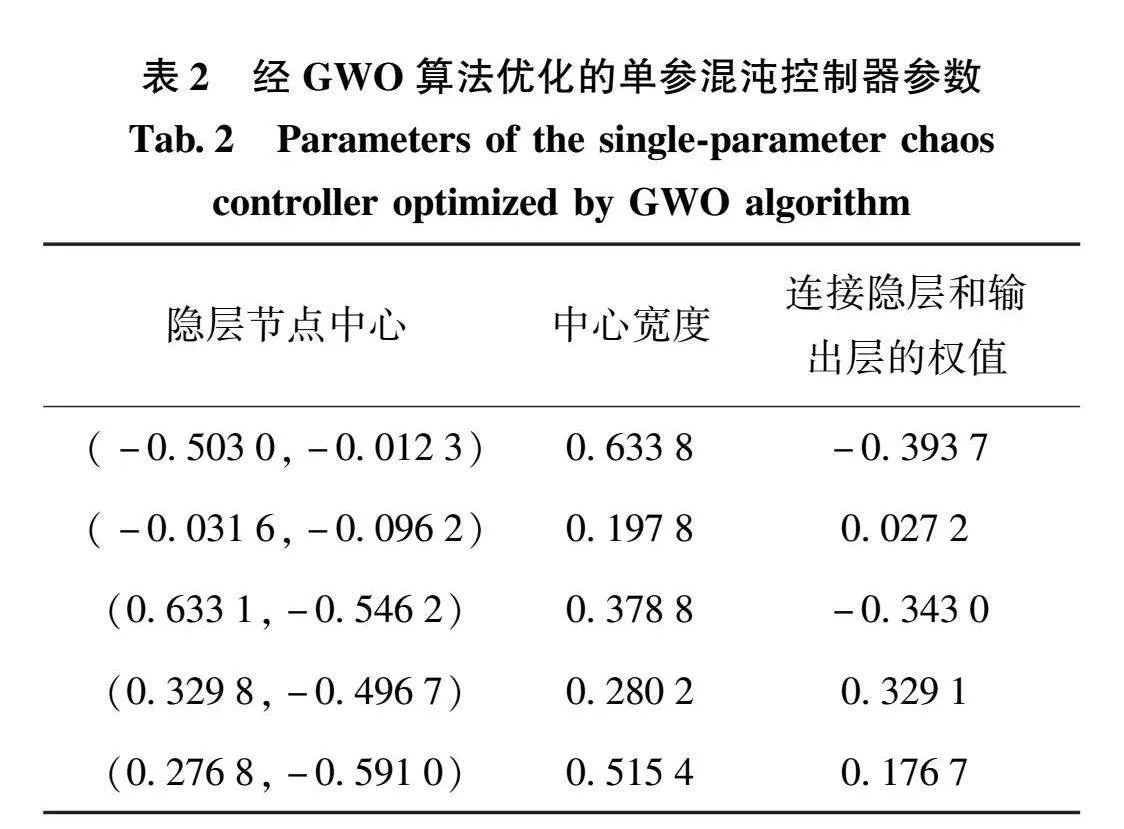
參數的優劣對于控制器的性能至關重要。為了優化控制器的參數(即隱層節點中心Ci、中心寬度σi、連接隱層和輸出層的權值wi),采用GWO在控制器的參數空間進行搜索,GWO中灰狼的位置向量對應于控制器的參數向量(該向量的元素為:隱層節點中心Ci、中心寬度σi、連接隱層和輸出層的權值wi)。
在本文中,使用相鄰兩次迭代后相軌跡在Poincaré截面上的投影點間的距離作為搜索預期平衡點的依據。同時考慮在對PMSM系統混沌運動進行控制時所需的最小能量消耗,構建GWO搜索最優控制器參數的目標函數為
Object=log(1γ)(0-‖Xk-Xk-1‖)(11)
使式(11)能夠取得最小值是GWO搜索尋優的目標。在這個目標的引導下,GWO中αw狼的位置向量就是相對最優的控制器參數。
4 仿真分析
4.1 系統仿真驗證
由第一章可知當γ=25、σ=5.46時系統發生混沌。根據PMSM系統的數學模型的奇點穩定性分析以及中心流定理,對其各個奇點的數學分析可得,奇點P1(0,0,0)是唯一穩定不動點。為了驗證基于GWO-RBFNN的雙參協同智能優化控制策略的有效性,在MATLAB中進行仿真。
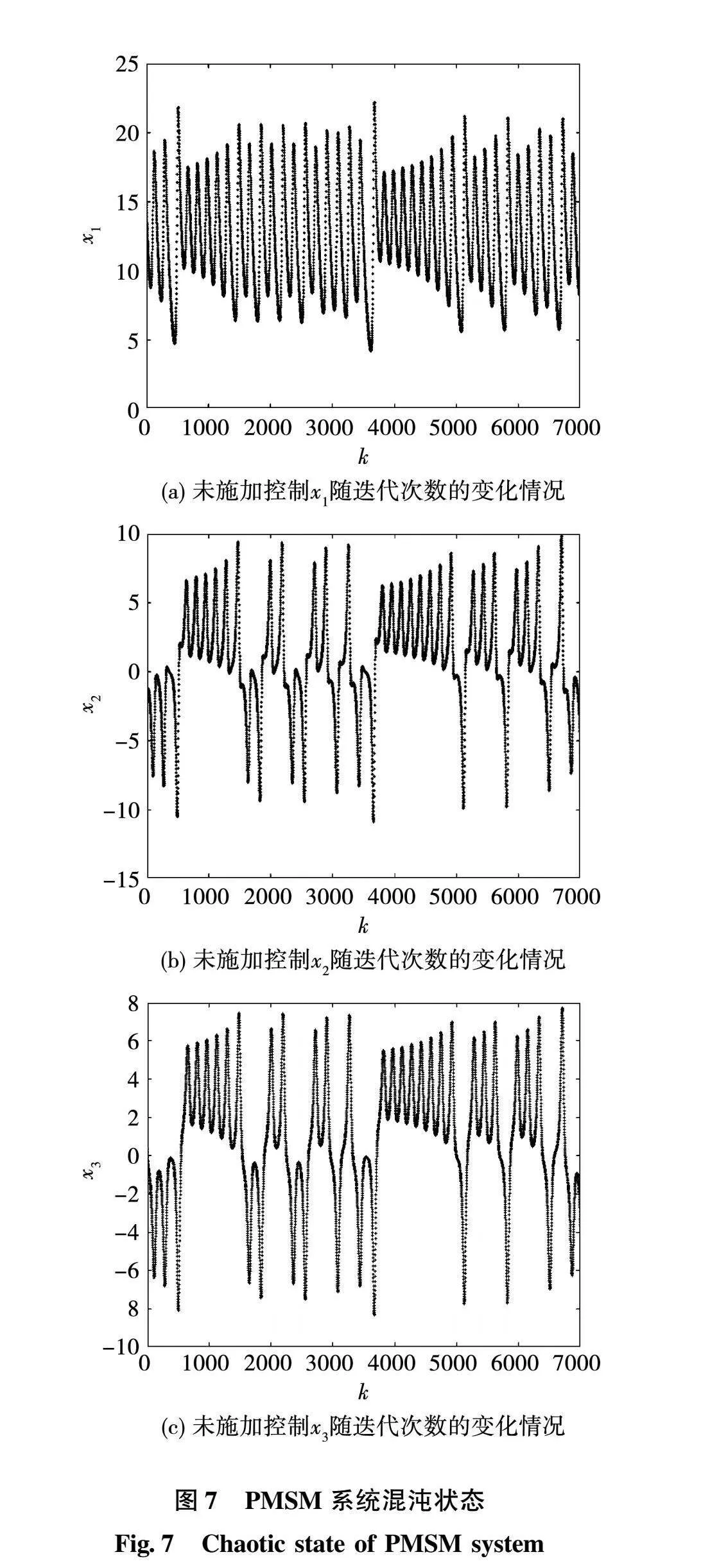
PMSM系統的初始參數選取如下:γ=25、σ=5.46,初值選取x1(0)=14.83、x2(0)=-1.35、x3(0)=0.38。圖7所示為未施加控制時系統的狀態變化曲線(此時系統產生混沌運動)。
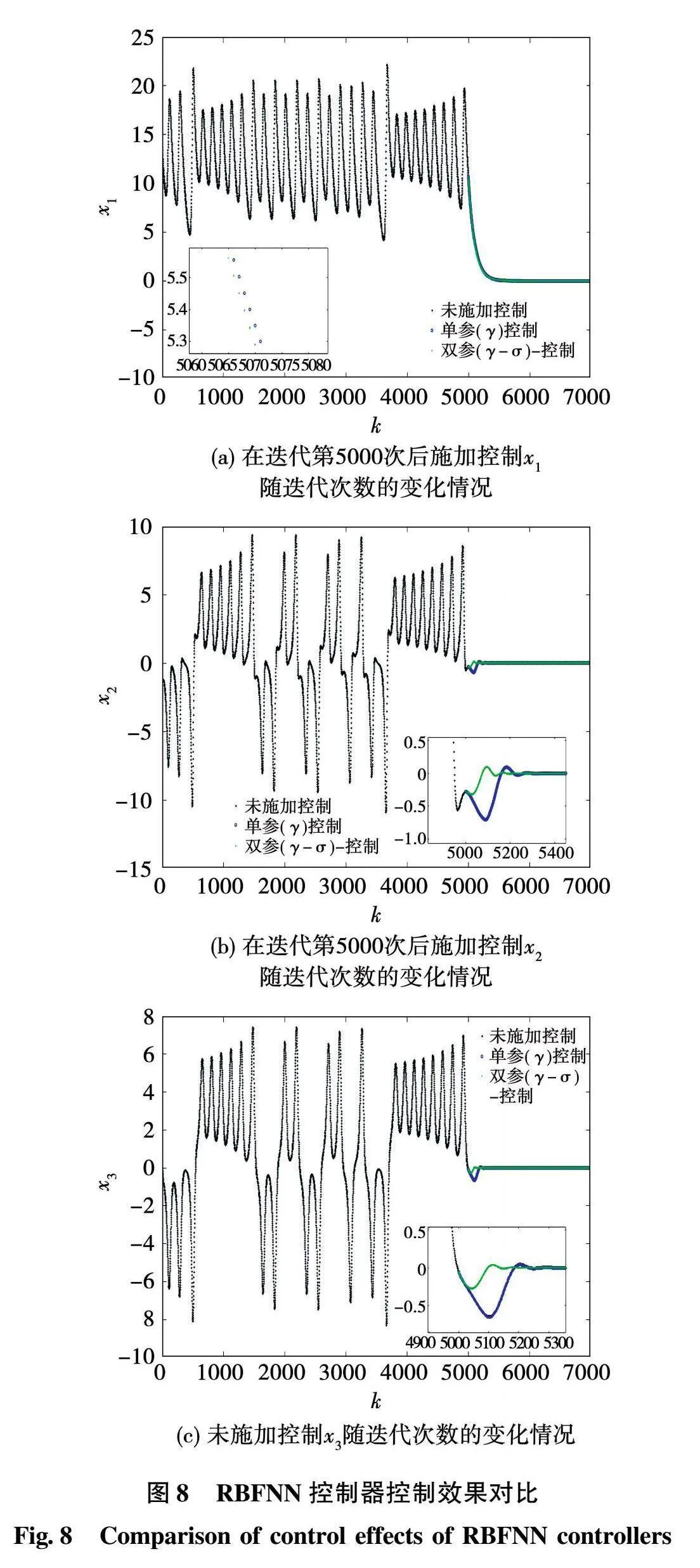
控制策略的仿真驗證研究中,將期望控制目標設為平衡點(0,0,0)。GWO算法的搜索次數設置為30。為了更清晰地表現對混沌運動的控制效果,在PMSM系統迭代5000次以后,開始施加控制,并且對基于GWO-RBFNN的雙參協同智能優化控制方法與基于GWO-RBFNN的單參智能優化控制方法進行了對比。仿真結果如圖8所示。
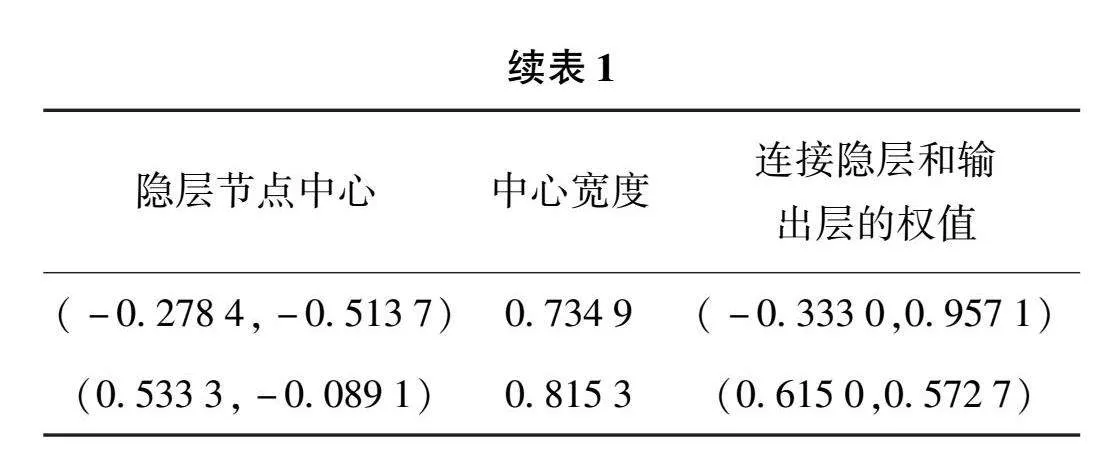
經GWO算法優化的控制器參數如表1和表2所示。
由圖7可見,未施加控制時,PMSM系統處于混沌運動狀態,系統響應偏離了平衡點(0,0,0)。
圖8施加控制之后,PMSM系統很快脫離了混沌運動狀態,系統響應穩定在平衡點(0,0,0)。而且圖8也反映出基于GWO-RBFNN的雙參協同智能優化控制方法、基于GWO-RBFNN的單參智能優化控制方法都能夠使系統自動搜尋并穩定到平衡點。但是通過對比也發現,基于GWO-RBFNN的雙參協同智能優化控制方法的控制效果要優于基于GWO-RBFNN的單參智能優化控制方法的控制效果。
根據上述仿真結果可以得知,本文所提出的方法可以有效地控制PMSM系統的混沌行為。
4.2 控制結果分析
仿真結果表明,本文所設計的基于GWO-RBFNN的雙參協同智能優化控制方法對于PMSM系統的混沌狀態有著良好的控制效果,與基于GWO-RBFNN的單參智能優化控制方法相比,其具有以下兩個主要的優點:
1)系統到達期望平衡點的速度更快。對比圖8中兩種控制方法的控制效果可以發現,基于GWO-RBFNN的雙參協同智能優化控制方法的控制速度相較更快,圖8(b)、圖8(c)中更清楚地反映出了這一點。
2)系統到達期望平衡點前的超調量更小。由圖8可見,采用基于GWO-RBFNN的單參智能優化控制方法后,系統到達期望平衡點前有明顯的超調量,而采用基于GWO-RBFNN的雙參協同智能優化控制方法后,改善了這一點,系統到達期望平衡點前的超調量明顯更小。
綜上所述,在式(11)所示目標函數的有效引導下,GWO算法成功地搜索到了控制器的相對最優參數,在控制器的作用下,PMSM系統能夠快速自動搜索并穩定在平衡點處。
經優化后的雙參協同混沌控制器具有良好的學習能力,能夠通過學習蘊含在輸入/輸出數據中的PMSM系統的非線性動態特性,對系統的可控參數實施適宜的調整,最終將PMSM系統的混沌狀態控制為穩定的狀態。
5 結 論
本文提出了一種基于GWO-RBFNN的永磁同步電機混沌運動雙參協同智能優化控制方法。通過仿真結果可知,本文所建立的目標函數可以很好地引導灰狼優化算法搜索到相對最優的控制器參數,提高了控制器的性能,確保控制器可以有效地學習PMSM系統的非線性動態特性。仿真實驗結果表明了該控制方法能夠有效地控制PMSM系統的混沌狀態,并且響應速度快,超調量小,該方法的可行性和有效性得到了驗證。
參 考 文 獻:
[1] 呂德剛,姜國威,紀堂龍.永磁同步電機低速域改進高頻脈振注入控制[J].哈爾濱理工大學學報,2022,27(6):32.
LV Degang,JIANG Guowei,JI Tanglong. Improved High Frequency Pulse Injection Control in Low Speed Domain of Permanent Magnet Synchronous Motor[J]. Journal of Harbin University of Science and Technology, 2022,27(6):32.
[2] 朱博,張鈺朋,徐攀騰等.實現位置同步的雙電機交叉耦合控制策略[J].哈爾濱理工大學學報,2022,27(5):114.
ZHU Bo,ZHANG Yupeng,XU Panteng,et al. Dual-motor Cross-coupling Control Strategy for Position Synchronization[J].Journal of Harbin University of Science and Technology,2022,27(5):114.
[3] ZHANG Rongyun,GONG Changfu,SHI Peicheng,et al. Research on Chaos Control of Permanent Magnet Synchronous Motor Based on the Synthetical Sliding Mode Control of Inverse System Decoupling[J]. Journal of Vibration and Control,2020,27(9-10).
[4] YANG Li,HUANG Tianmin,DENG Lin,et al. Analysis on Chaotic Mechanism of Direct-Drive Permanent Magnet Synchronous Generators Based on Lyapunov Stability Theory[J]. European Journal of Electrical Engineering,2019,21(6).
[5] Vibration and Acoustics. Studies from Anhui Polytechnic University Add New Findings in the Area of Vibration and Acoustics (Research on Chaos Control of Permanent Magnet Synchronous Motor Based on the Synthetical Sliding Mode Control of Inverse System Decoupling)[J]. Journal of Technology & Science,2020.
[6] ARIF Iqbal,GIRISH Kumar Singh. Chaos Control of Permanent Magnet Synchronous Motor Using Simple Controllers[J]. Transactions of the Institute of Measurement and Control,2019,41(8).
[7] Soft Computing.Study Results from Fayoum University Broaden Understanding of Soft Computing (Chaotic Whale Optimizer Variants for Parameters Estimation of the Chaotic Behavior in Permanent Magnet Synchronous Motor)[J].Computer Weekly News,2019.
[8] YOUSRI D A, ALLAM Dalia, ETEIBA M B. Chaotic Whale Optimizer Variants for Parameters Estimation of the Chaotic Behavior in Permanent Magnet Synchronous Motor[J]. Applied Soft Computing Journal,2018,74.
[9] Mathematics-Chaos Research. Reports on Chaos Research from Tianjin Polytechnic University Provide New Insights (Force Analysis and Energy Operation of Chaotic System of Permanent Magnet Synchronous Motor)[J]. Journal of Robotics & Machine Learning,2018.
[10]LI Jun,WANG Libiao,SHI Jing, et al. Chaotic Characteristic Analysis of Brushless DC Motor with Vibration Load Disturbance[J]. Journal of Engineering Science and Technology Review,2018,11(6).
[11]QI Guoyuan, HU Jianbing. Force Analysis and Energy Operation of Chaotic System of Permanent-Magnet Synchronous Motor[J]. International Journal of Bifurcation and Chaos,2017,27(14).
[12]ZHENG Kunming, CHEN Haiwei, ZHANG Qiuju, et al. Study the Micro Chaotic Phenomena and Itscontrol of Rigid-flexible Robot[J]. Journal of Mechanical Science and Technology,2022,36(5).
[13]RAJAGOPAL Karthikeyan,JAHANSHAHI Hadi,JAFARI Sajad,et al.
Coexisting Attractors in a Fractional Order Hydro Turbine Governing System and Fuzzy PID Based Chaos Control[J]. Asian Journal of Control,2020,23(2).
[14]JIE Z,JIANHUA S,HAI G,et al. Control of PMSM Chaos Using Backstepping-based Adaptive Fuzzy Method in the Presence of Uncertainty and Disturbance[J]. Systems Science & Control Engineering,2021,9(1).
[15]李洋洋,張懿,戴磊,等.基于LMI算法的永磁同步電機混沌控制[J].微特電機,2021,49(1):40.
LI Yangyang,ZHANG Yi,DAI Lei,et al. Chaotic Control of Permanent Magnet Synchronous Motor Based on LMI Algorithm[J]. Micro Motor, 2021,49(1):40.
[16]ABOLFAZL Karimi, HAMIDREZA Akbari, Somaye Mousavi & Zohre Beheshtipour. Design of an Adaptive Terminal Sliding Mode to Control the PMSM Chaos Phenomenon[J].Systems Science & Control Engineering,2023,11:1.
[17]謝東燊,楊俊華,熊鋒俊,等.永磁直線同步電機解耦自適應滑模混沌控制[J].計算機仿真,2019,36(5):263.
XIE Dongshen,YANG Junhua,XIONG Fengjun,et al. Permanent Magnet Linear Synchronous Motor Decouples Adaptive Sliding Mode Chaos Control[J]. Computer Simulation,2019,36(5):263.
[18]黃俊豪,楊俊華,陳海峰,等.基于PSO優化的永磁直線同步電機混沌滑模控制[J].計算機仿真,2021,38(11):215.
HUANG Junhao,YANG Junhua,CHEN Haifeng,et al. Chaotic Sliding Mode Control of Permanent Magnet Linear Synchronous Motor Based on PSO Optimization[J]. Computer Simulation,2021,38(11):215.
[19]ZHANG Jie, SUN Jianhua, GU Hai. Hesam Poloei & Abolfazl Karami. Control of PMSM Chaos Using Backstepping-based Adaptive Fuzzy Method in the Presence of Uncertainty and Disturbance[J].Systems Science & Control Engineering,2021,9:1,673.
[20]張波,李忠,毛宗源,等. 一類永磁同步電動機混沌模型與霍夫分叉[J].中國電機工程學報,2001,21(9):13.
ZHANG Bo,LI Zhong,MAO Zongyuan,et al. A Class of Permanent Magnet Synchronous Motor Chaosmodel and Hough Bifurcation[J]. Proceedings of the CSEE, 2001,21(9):13.
(編輯:溫澤宇)
