智能無人艇關鍵技術需求分析研究
2024-09-30 00:00:00楊成斌吳曉陽張魯君劉先越
科技創新與應用 2024年28期
摘 要:發展具有強人工智能特點的高性能無人艇對于建設海洋強國和強大海上軍事力量具有重要意義,也是一項需要廣大研究和技術人員長期投入、協同創新、共同開發的復雜系統工程。針對現有研究成果中缺乏從系統整體角度梳理、呈現無人艇關鍵技術需求的現狀,基于系統整體視角,剖析“人艇一體”的理想智能艇所應具備的能力,從而類比得到理想無人艇的8項能力要素。在此基礎上,提出一種基于技術-能力映射的關鍵技術需求分析方法。利用該方法,全面分析并總結制約無人艇走向高度智能化的一系列關鍵技術,包括人工智能技術、先進平臺設計技術、虛擬測試和訓練技術等。
關鍵詞:無人艇;人工智能;關鍵技術;需求;系統分析
中圖分類號:U674.7 文獻標志碼:A 文章編號:2095-2945(2024)28-0008-07
Abstract: The development of high-performance unmanned surface vehicles with strong artificial intelligence characteristics is of great significance for building a maritime power and a powerful naval force. It is also a complex systems engineering project that requires extensive research and technological input, collaborative innovation, and joint development by a large number of researchers and technicians. In view of the current lack of systematic analysis and presentation of the key technological requirements for unmanned vehicles in existing research results, this paper analyzes the capabilities that an ideal intelligent vehicle should possess from a holistic perspective, and then analogically derives eight elements of capabilities for an ideal unmanned vehicle. Based on this analysis, a key technology requirement analysis method based on technology-capability mapping is proposed. Using this method, a comprehensive analysis and summary of a series of key technologies that constrain unmanned vehicles to move towards high intelligence are conducted, including artificial intelligence technology, advanced platform design technology, virtual testing and training technology, etc.
Keywords: unmanned surface vehicle (USV); artificial intelligence (AI); key technology; requirement; system analysis
環境感知、目標識別、信息處理與融合、機器學習與強化學習等人工智能基礎技術的日漸成熟,有力促進了軍用和民用各領域智能化技術的蓬勃發展[1]。由于世界各國對海洋利益和海上安全方向的高度重視,廣闊的海洋空間如今已然成為大國博弈的“主戰場”[2]。隨著信息技術和人工智能技術的深入發展,以及近年來國際軍事力量格局和地區安全形勢的持續變化,馬賽克戰、分布式殺傷、全域聯合指揮控制等新型作戰概念和軍事理論快速興起,不斷演變,現代海戰更加強調廣域感知、跨域互聯、高效協同和智能決策的重要性。在此背景下,智能無人化作戰成為現代海戰的重要發展方向,海上無人系統集群作戰也正在從作戰概念走向實裝應用[3-4]。在建設海洋強國和世界一流軍隊的征程中,作為高精尖技術裝備和海上新質作戰力量重要增長點的智能無人艇,將成為建設海洋強國的關鍵支撐力量。先進智能無人艇的研究和開發是一項長期而復雜的系統工程,需要廣泛調動具有創新和攻堅精神的科研、技術人員參與其中。本文旨在幫助有志于從事智能無人艇研究的廣大科研、技術人員從系統整體角度認識智能無人艇的能力要素和結構組成,快速、準確、全面地理解發展先進智能無人艇所需的關鍵技術。本文在綜述有關智能無人艇關鍵技術需求研究現有成果的基礎上,基于系統視角全面剖析智能無人艇的能力要素組成,全面梳理支撐智能無人艇的技術體系,指出智能無人艇走向強人工智能化需要突破的關鍵技術瓶頸。
1 智能無人艇關鍵技術需求分析的研究現狀
1.1 無人艇和智能無人艇的概念
無人艇是指不搭載乘員、無需專業人員直接操控,能夠在一定范圍的水域或海上航行、避障的小型船舶。無人艇的出現最早可追溯至19世紀末。當時,著名科學家尼古拉·特斯拉就對一艘無人艇進行了遙控實驗,這可視為第一艘無人艇的誕生。20世紀60年代,無人艇被廣泛應用于反水雷戰,美國曾將一艘汽油機驅動的小艇改裝為遙控掃雷艇[5]。不過上述無人艇并不具有先進的傳感系統和自主智能系統,需要人為控制,只能稱為“遙控無人艇”,還不能稱為“智能無人艇”。所謂智能無人艇,是指融入了人工智能技術、具備一定自主行為能力的無人艇,這種自主行為能力通常表現為能夠自主完成海洋環境感知、自主定位導航、自主路徑規劃、航線動態調整與避障,等等。由于人工智能技術已經在無人艇上普遍應用,業內已習慣于將無人艇與智能無人艇這2個概念等同起來,也就是說,人們通常默認人工智能為無人艇所必有的一般屬性。為簡化表述,以下所說的“無人艇”若無特殊說明,均指 “智能無人艇”。
1.2 現有文獻對無人艇關鍵技術需求分析情況
對無人艇關鍵技術需求的分析或總結主要在以下3類文獻中出現:一是關于海上/水下無人系統技術發展的綜述類文獻,如文獻[2]、[4]、[6—9];二是對無人艇平臺某一項關鍵技術的具體研究,如文獻[5]、[10—16];三是關于無人艇/無人平臺集群作戰運用的探討,如文獻[1]、[17—20]。
1.2.1 綜述類文獻中對無人艇關鍵技術需求的分析
文獻[2]研究了無人艇集群控制所需的關鍵技術,包括集群任務分配、集群編隊控制和集群避障3個方面的技術,并具體分析了上述3個方面的現有技術手段及其局限性。文獻[4]研究了無人機(UAV)集群,水面無人艇(USV)集群和無人水下機器人(無人潛航器,UUV)集群等海上無人系統集群的發展現狀,分析了未來海上無人系統集群的發展趨勢,并從通信自組網、協同態勢感知、任務分配、航跡規劃、編隊控制和虛擬測試6個方面總結了所需要的關鍵技術。文獻[6]比較全面地研究了美、歐主要國家無人艇的發展歷程和現狀,從環境感知技術、航跡規劃技術、集群控制和協同技術3個方面剖析了無人艇需要解決的關鍵技術。針對集群控制和協同問題,該文獻從航跡跟蹤、減搖、避障、編隊、博弈和組網通信6個方面詳盡分析了其面臨的技術挑戰。文獻[7]認為,無人艇研究的關鍵技術由控制、導航和感知3個方面組成,目前的無人艇尚不具備完全自主化、智能化的能力,而制約無人艇走向完全自主化、智能化的一個重要因素是現有智能試驗手段的局限性和理想無人艇試驗平臺的缺乏。為此,文獻分析了利用數字孿生技術搭建無人艇智能試驗平臺的優勢和可行性。邱志明院士等[8]在系統研究國內外水下無人裝備發展現狀并提出前沿發展趨勢的基礎上,分層次地梳理了水下無人裝備未來需要發展的關鍵技術,主要是平臺技術、信息技術和智能技術3個技術群,平臺技術包括總體設計技術、能源動力技術、布放回收技術等,信息技術包括導航定位技術、探測識別技術、通信組網技術和探測通信一體化技術等,智能技術則分為平臺智能化技術和智能集群協同技術,這些關鍵技術需求分析對于無人艇也具有參考價值。文獻[9]基于專利數據和技術關鍵詞頻次統計分析,篩選出了智能感知、自主航行控制、先進動力源、動力推進、平臺設計、集成/協同智能控制、通信/通訊和可靠性試驗等9類海洋無人系統智能裝備基礎共性關鍵技術,以及布放回收、有效載荷輸送、能效管理等8類海洋無人系統智能裝備專用關鍵技術。
1.2.2 具體技術研究中對無人艇關鍵技術需求的分析
文獻[5]指出,航跡跟蹤技術是無人艇實現自主航行的一個基本問題,無人艇航跡跟蹤面臨的幾個具有挑戰性的問題包括非線性、不確定性、欠驅動、受限或不可測量的狀態、有限的通信帶寬以及避障要求等。文獻[10]針對利用無人艇布放、回收自主水下航行器(AUV)面臨的技術挑戰,以及所需解決的關鍵技術進行了分析,總結了3個方面的關鍵技術,即AUV集成布放與回收設計、AUV引導捕獲裝置設計和跨介質協同控制。文獻[11]指出,要實現無人機與無人艇之間的空海協同作業,須重點解決機艇空海協同中無人機實時跟蹤與精準著艇問題。文獻[12]指出,無人艇的關鍵技術涉及運動控制、智能路徑規劃、環境感知、網絡通信以及信號處理等,其理論基礎則涵蓋控制理論、運籌學、博弈論、模式識別、圖像理解和自動化原理等。文獻 [13]指出,受限于自身性能限制和環境干擾,目前無人艇在循跡航行和自主避障能力方面距理想狀態仍存在很大差距,路徑跟蹤和自主避障控制仍是無人艇實現自主航行、保障安全并完成任務急需解決的關鍵技術。文獻[14]、[15]指出,自主避障是為實現無人艇自主航行所必須攻克的一項關鍵技術,文獻針對該問題,研究了利用同時定位和建圖(SLAM)技術和多傳感器融合技術實現無人艇自主避障的技術方案。文獻[16]指出,無人艇的智能算法需要大量訓練與試驗驗證,直接開展物理試驗成本很高,風險較大。為此,要發展無人艇航行仿真技術,通過虛擬仿真或硬件在環仿真,提高研制效率,縮短試驗周期,降低成本和風險。
1.2.3 作戰運用研究中對無人艇關鍵技術需求的分析
文獻[1]調研了國外軍用領域人工智能發展規劃,指出感知、處理、反饋等技術基礎的日趨成熟促進了艦船智能化發展,網絡互聯、數據支撐、智能控制、自主決策和多域一體協同是發展方向,而智能化狀態監控、智能操控技術、目標探測識別技術和作戰輔助決策技術則是實現上述發展不可或缺的關鍵技術。文獻[17]分析了利用無人艇引導艦船在復雜海區航行的優勢,并從導航和定位、智能路徑規劃和避障、環境感知和目標識別、通信和協同控制,以及可靠性和安全性技術5個方面總結了無人艇需要進一步解決的關鍵技術。文獻[18]根據集群攻擊、分布攻防、彈性防御3種作戰運用模式對無人艇的需求,分析了無人艇需要突破的關鍵技術,具體包括艇型技術、自主規劃與控制技術,以及布放與回收技術3個方面。文獻[19]研究了為構建海上有人無人分布式協同作戰體系需要解決的關鍵技術,包括協同交互控制技術、協同態勢估計技術、協同威脅估計技術、協同航路規劃技術、協同目標分配技術、協同資源管控技術,以及協同打擊鏈構建技術。無人艇是分布式協同作戰體系中的重要作戰節點,因而上述關鍵技術也與無人艇本身的關鍵技術有著密不可分的關聯。文獻[20]從島礁無人作戰對多平臺智能集群自主協同作戰的需求出發,提出并強調了基于體系原型的演示驗證技術、無人作戰體系效能評估和無人平臺對體系效能貢獻率的評估技術,以及集成試驗環境作為評估環境搭建技術的重要性。
1.3 現有研究評述
上述文獻關于無人艇關鍵技術需求的研究為認識無人艇技術體系和理解其關鍵技術需求提供了很好的參考,但是從對無人艇關鍵技術需求作系統、全面分析的角度看,尚存在以下不足:一是現有的綜述類文獻中,除文獻[7]外,都是針對與無人艇相關、但系統層級更高的水下無人裝備、無人艇集群、無人系統集群、軍事智能裝備等進行的關鍵技術需求分析,沒有聚焦無人艇的關鍵技術需求分析,而文獻[7]雖然談到了無人艇研究的關鍵技術主要由控制、導航和感知等3個方面組成,但并沒有繼續展開分析,而是主要從虛擬試驗的角度詳細討論利用數字孿生技術構建無人艇智能試驗平臺的優勢、可行性和具體方案;二是具體技術研究類文獻中對無人艇關鍵技術需求的分析受限于研究范圍,主要是針對循跡航行、自主避障等單項技術需求進行了比較詳細的分析,對無人艇的其他關鍵技術即使偶有涉及也只是簡單概括,沒有完整地呈現支撐無人艇的整個技術體系;三是作戰運用研究類文獻主要是從有人/無人作戰體系的角度提出有關的技術需求,這些技術需求是基于提升整個作戰體系效能的考慮提出的,因而并沒有分解為無人艇本身的關鍵技術需求;四是現有的文獻并沒有從系統整體的角度專門考察無人艇進一步智能化所需的能力簇和系統結構組成,因而對其關鍵技術需求的分析可能會有所遺漏。為此,本文將從系統整體視角出發,全面剖析無人艇的能力要素和結構組成,并在此基礎上進一步分析其關鍵技術需求。
2 基于系統整體視角的無人艇能力要素分析
2.1 理想智能艇模型
具有強人工智能特征的無人艇是在海上自主活動的智能Agent,應具有與有人船舶高度相似的能力要素。為便于分析和理解,可以從有人船舶入手來回答這個問題,不妨考察一艘核載5名乘員的執法巡邏艇所應當具有的能力要素。假設5名乘員分別負責指揮(指揮員)、操控(操控員)、瞭望(瞭望員)、通信聯絡(通信員)和執法艇平臺巡檢維護(維護員),該執法艇的任務是每天在指定海域巡邏若干次,處置巡邏期間可能遇到的他國船只越界侵權行為。在系統整體視角下,我們將這5名乘員和執法艇平臺“封裝”在一起,視作一個整體,那么這個整體是一個理想智能Agent,稱為理想智能艇。
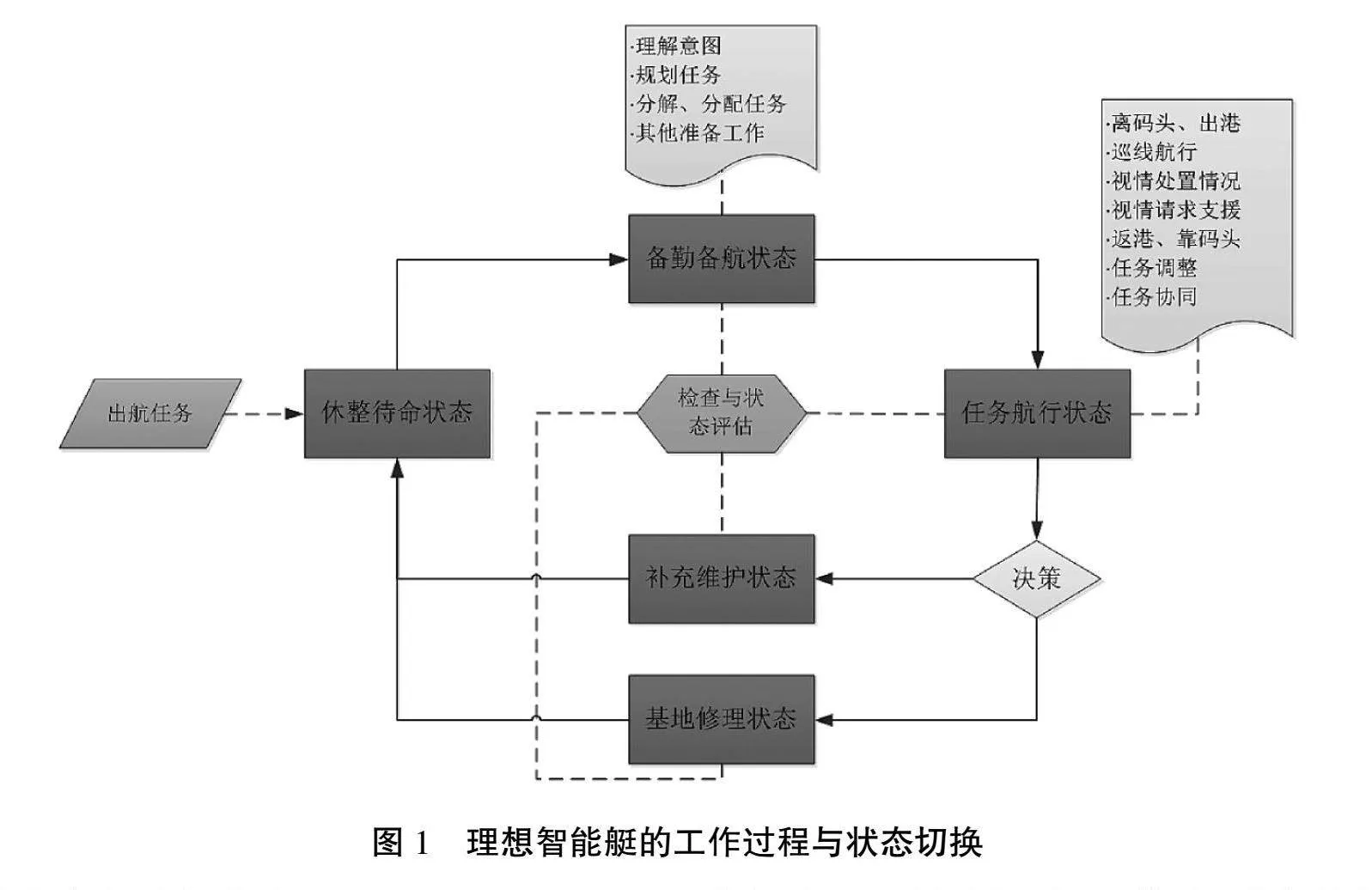
現在基于“警告驅離駛入我領海區域的外國船只”的使命任務來考慮理想智能艇所具有的能力。一般而言,理想智能艇所處的狀態可以歸納為5種,即任務航行狀態、備勤備航狀態、休整待命狀態、補充維護狀態和基地修理狀態。如圖1所示,在整個壽命期,理想智能艇不斷地在上述5種狀態之間相互切換,而促使狀態切換的根本推力是由上級指揮機構下達的出航任務。隨著出航任務的下達,原本處于休整待命狀態的理想智能艇迅速理解上級意圖,評估并調整好自身狀態,合理規劃和安排任務,并完成備勤備航部署,隨即進入任務航行狀態。任務結束后,理想智能艇則根據需要進入補充維護或基地修理狀態,并在完成補充維護或基地修理之后重新轉入休整待命狀態。
2.2 無人艇能力要素分解
根據理想智能艇的任務使命和全壽命期內的狀態切換過程,可對其能力簇作如下分解。
2.2.1 領受任務并理解上級意圖的能力
理想智能艇的每一次出航必然有上級下達的出航任務作為行動依據。上級下達任務的方式可以有多種,如臨時電話通知、正式文件通知,或被上級批準的航行計劃等。理想智能艇的指揮員應該能夠通過適當途徑接收任務信息,并在領受任務的同時理解上級意圖,這是開展后續工作的基礎和前提。
2.2.2 檢查、評估自身狀態的能力
為保證自身安全和任務成功率,在每一次出航之前,理想智能艇必須全面檢查并評估自身狀態,包括全體乘員是否在位,艇體結構有無破損,機械、電子設備等是否完好可用,油、水、備件等補給品是否充足,等等。理想智能艇通過全面自檢,結合任務持續時間和距下一次計劃修理時間等因素,對自身狀態給出綜合評估結論,以盡早發現并消除那些影響任務執行的不利因素,如補充燃油、更換機油、排除設備故障等。在航行過程中和任務執行完畢以后,理想智能艇也要進行狀態檢查和評估,通過維護員的維護工作或依靠外部支援力量使自身狀態保持良好或盡快恢復到良好狀態。
2.2.3 任務規劃、分解與分配能力
理想智能艇在領受任務并充分理解上級意圖之后,就要合理規劃任務,如確定航行的目標區域、制定計劃航線和情況處置預案等,并根據任務的復雜程度對其進行適當的分解,例如把一次繞島巡航任務分解為3個子任務,其一是完成離碼頭、出港和進入計劃航線,其二是巡線航行并視情處置違法船只,其三是完成返航、入港和靠碼頭。為保證任務完成度,提高任務執行效率,指揮員還需要根據每一名乘員的專長和其他方面能力素質進行任務分工與分配。基本的職能分工可以通過規定各崗位的職責清單和各類制定部署表來實現,但一些臨時性和附加的任務則需要指揮員根據實際情況進行任務分配。例如,當理想智能艇接近目標船只后,需要對其進行喊話驅離,這時指揮員可根據乘員的執法素養和當前工作狀態,決定指派誰前去喊話,執行者可以是瞭望員、通信員,或者指揮員。
2.2.4 循線航行、避碰與離/靠碼頭能力
為實現循線航行,理想智能艇需要實時獲取當前位置、航向和航速,并根據當前位置偏離計劃航線的情況適時調整航向與航速,這需要指揮員利用航海設備和儀器獲取必要信息并向操控員下達正確的操控指令。在航行過程中遇到靜態或動態障礙物時,則需要及時避障,并在避障之后回到計劃航線上。如果動態障礙物是其他船只,則需要按照國際避碰規則進行避碰操作。在離/靠碼頭時,由于轉向幅度大、操作空間有限且障礙物較多,通常需要按照機動性更強的方式進行操車和操舵,以便在確保安全的情況下高效完成離/靠碼頭作業。在避碰和離/靠碼頭的過程中,通常需要瞭望員更加密切地關注周邊態勢并及時向指揮員報告有關情況。
2.2.5 環境感知、目標探測與識別能力
這里的環境感知主要是指理想智能艇能夠實時感知風、浪、流、水深、溫度和氣象等環境信息,供指揮員決策使用。目標探測和識別則是指能夠在盡可能大的范圍內對目標船只進行探測和識別。環境信息主要依靠集成在理想智能艇上的雷達、聲吶、測深儀等傳感器獲得,而對目標船只的識別則不僅需要雷達、AIS等設備提供的信息,還在一定程度上依靠瞭望員與指揮員的經驗。
2.2.6 根據處置預案警告驅離目標船只的能力
根據處置預案警告驅離目標船只是理想智能艇的核心任務能力,理想智能艇的存在,以及所有的航行活動及準備工作,都是為了應對巡邏過程中可能發生的此類事件。警告驅離目標船只的過程可簡化如下:首先,理想智能艇根據目標船只所在位置和航向航速等信息,調整自身航向航速,接近目標船只,進行跟蹤監視和拍攝取證;然后,由艇上乘員對目標船只進行喊話,聲明我方身份,明確警告目標船只已進入我領海區域,需立即駛離,否則將遭受強制驅離措施,并在喊話的同時觀察對方應答情況和船只實際動向;若目標船只在收到我方警告之后駛離我領海區域,則驅離任務結束,理想智能艇將處置情況及時反饋給上級指揮點;若目標船只在收到我方警告之后仍在我領海區域活動,則理想智能艇對目標船只進行持續跟蹤監視和警告驅離,逐漸采取聲光拒止、水炮攻擊等措施進行強制驅離,并視情呼叫執法力量支援,直到目標船只駛離我領海區域為止。
2.2.7 主動通聯和請求支援的能力
不論是在正常航行過程中,還是在執法過程中,理想智能艇都需要與外界(包括岸基指揮點、航行編隊中的指揮節點,以及需要通信的其他船舶)保持通信暢通,以便及時傳輸各類數據信息,實現信息回傳和態勢共享,根據上級指示對任務作出調整,以及在遭遇突發情況時請求外部支援。因此,理想智能艇不能僅僅滿足于接收外界信息,還要能夠主動與外界進行通信聯絡,這在有人參與的情況下根本不構成挑戰,但如果完全沒有人為干預,可能會產生意想不到的困難,比如主動向上級報告情況的頻次,呼叫外部支援的時機,等等。
2.2.8 與其他智能Agent協同的能力
為了在必要時能夠與其他智能Agent相互配合,協同完成復雜任務,還需要理想智能艇具有與其他智能Agent協同的能力。需要協同配合的對象可能是同構的,例如相同型號的其他執法巡邏艇,這時需要2艘以上的巡邏艇編隊航行,相互之間通過動態通信組網保持通聯,并具有明確的指揮關系;但也可能是異構的,比如理想智能艇本身是大型執法船舶上的一艘附屬工作艇,在巡邏時需要與母船進行協同,需要考慮巡邏艇的回收和布放問題;又或者是異質的,例如理想智能艇需要與旋翼無人機進行配合,形成空海協同,以充分發揮執法巡邏艇和執法無人機各自的優勢,這就需要考慮機、艇速度匹配,以及無人機著艇等問題。對于理想智能艇來說,由于實際上有人員參與,保持編隊航行、動態通信組網、工作艇布放回收及機艇協同等問題都可以比較容易解決。
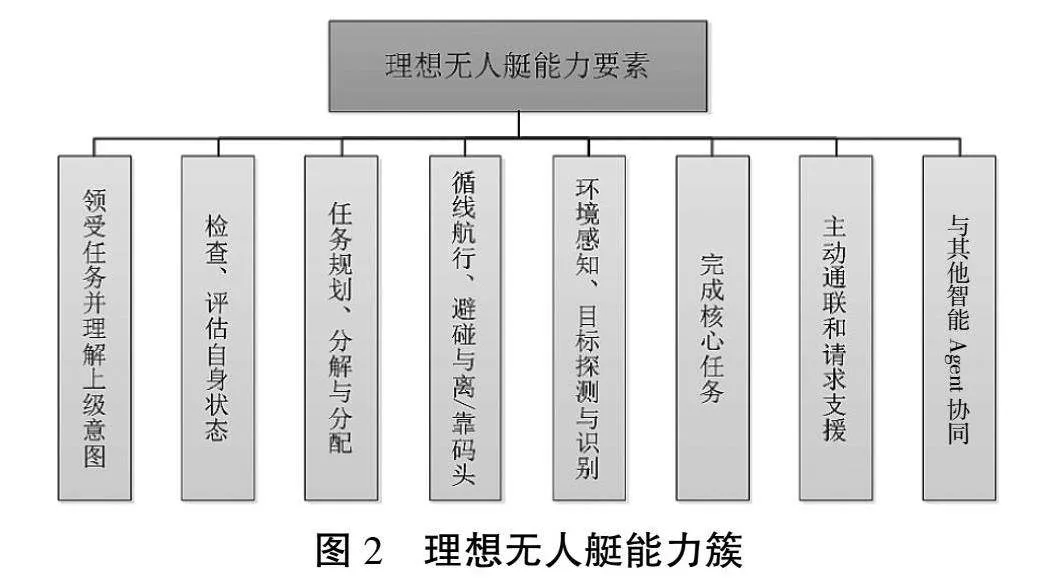
綜合言之,用于執法巡邏的理想智能艇需要具備8種能力要素,分別是:①領受任務并理解上級意圖的能力;②檢查、評估自身狀態的能力;③任務規劃、分解與分配能力;④循線航行、避碰與離/靠碼頭能力;⑤環境感知、目標探測與識別能力;⑥根據處置預案警告驅離目標船只的能力;⑦主動通聯和請求支援的能力;⑧與其他智能Agent協同的能力。上述能力要素中,第6個能力要素,即根據處置預案警告驅離目標船只的能力,是專門針對執法巡邏艇而言的,如推廣到一般的理想智能艇,該項能力要素則應表述為“完成核心任務的能力”,這種核心任務可以是海洋測繪、人員搜救、消防救援、抵近偵察、毀傷評估,乃至火力打擊,等等,根據實際任務要求而定。其余的7項能力要素則是理想智能艇的通用能力要素。智能化程度越高的無人艇,其能力也應該越接近上述理想智能艇,具有強人工智能特點的無人艇也應該具備上述8項能力。因此,對于理想狀態的無人艇,其能力簇的結構應如圖2所示。
3 理想無人艇關鍵技術需求分析
3.1 基于技術-能力映射的分析方法
為系統梳理智能無人艇的關鍵技術需求,這里提出一種基于技術-能力映射的關鍵技術需求分析方法。在有人參與的理想智能艇中,人的因素尤其是人的智能因素,在能力簇的各個能力要素中都發揮了重要作用。在無人艇中,之所以不需要人員參與,是因為具有語言處理能力和決策分析能力的人工智能替代了人的因素。由于人工智能本身也可以視作一種技術,可以認為,無人艇的各個能力要素本質上是由不同的技術構成決定的,因而在技術構成和能力要素之間存在著廣義的映射關系,簡稱為“技術-能力映射”。那么,既然存在理想無人艇的能力簇結構,就可以根據各能力要素反向推演其技術構成,從而分析并確定其中哪些技術是關鍵技術。
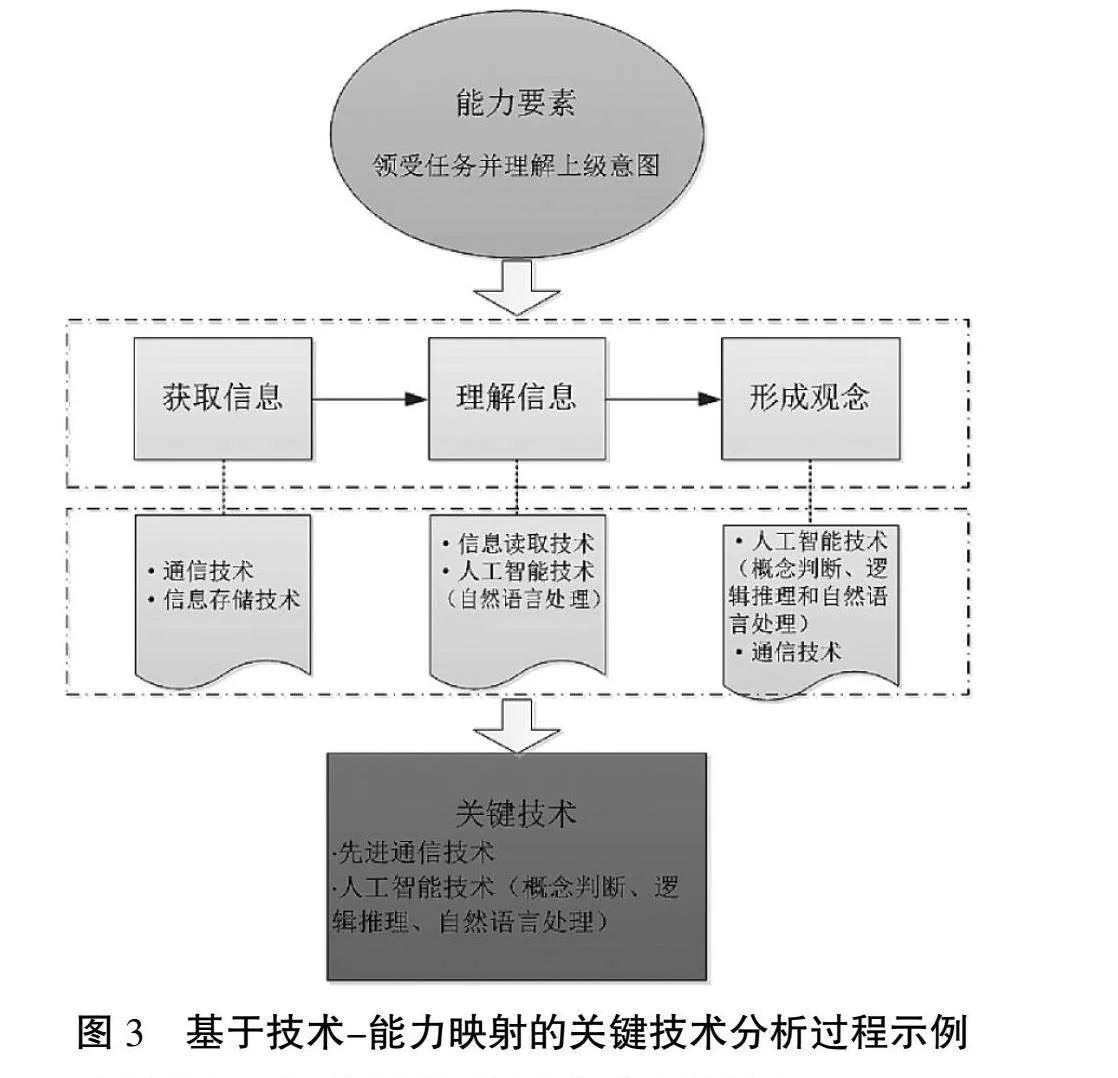
以“領受任務并理解上級意圖”能力要素為例,具體分析支撐該項能力要素的技術構成。在有人參與的理想智能艇中,上級以人類可理解的自然語言形式向指揮員下達出航任務,指揮員則從載有任務信息的自然語言中識別信息、理解信息,思考并形成關于“根據上級命令/指示,我們接下來要做什么”這一問題的答案。對于缺乏人員參與的無人艇,則上述過程可以被分解為獲取信息、理解信息、形成觀念3個步驟。
首先是獲取信息,對于無人艇來說,應該通過適當的技術手段,確保其與上級指揮點之間保持全時全天候通信暢通,并能夠將來自指揮點的任務信息及時、完整、準確地存儲起來。這里主要涉及通信技術和信息存儲技術。這2種技術目前都能實現,但遠距離、高可靠、低延遲的先進通信技術實現起來有較大難度,因此先進通信技術是關鍵技術。
接下來,無人艇需要對以自然語言為載體的任務信息進行解讀,也就是理解信息。這首先要訪問任務信息存儲地址,將任務信息提取到語言處理系統,然后根據自然語言與計算機語言之間的解譯規則,把自然語言轉化為計算機可理解的語言,并識別其中的有用信息。這里主要涉及信息讀取技術和基于人工智能的離線自然語言處理技術,后者是一項目前尚未突破的關鍵技術。
最后是形成觀念,在這一步驟中,無人艇根據對任務信息的解讀,形成“我們將做什么”的觀念,并將其基于任務信息解讀形成的觀念以自然語言的形式呈現出來,并反饋給上級。這里涉及的技術主要包括能夠進行概念判斷、邏輯推理和自然語言處理的人工智能技術,以及通信技術,而人工智能技術仍然是其中的重點和難點。
綜上所述,通過對能力要素與技術構成之間的映射分析,最終確定了無人艇為獲得“領受任務并理解上級意圖”這一能力所需要的2項關鍵技術,即先進通信技術和具有概念判斷、邏輯推理和自然語言處理功能的人工智能技術,如圖3所示。
3.2 理想無人艇關鍵技術需求分析結果
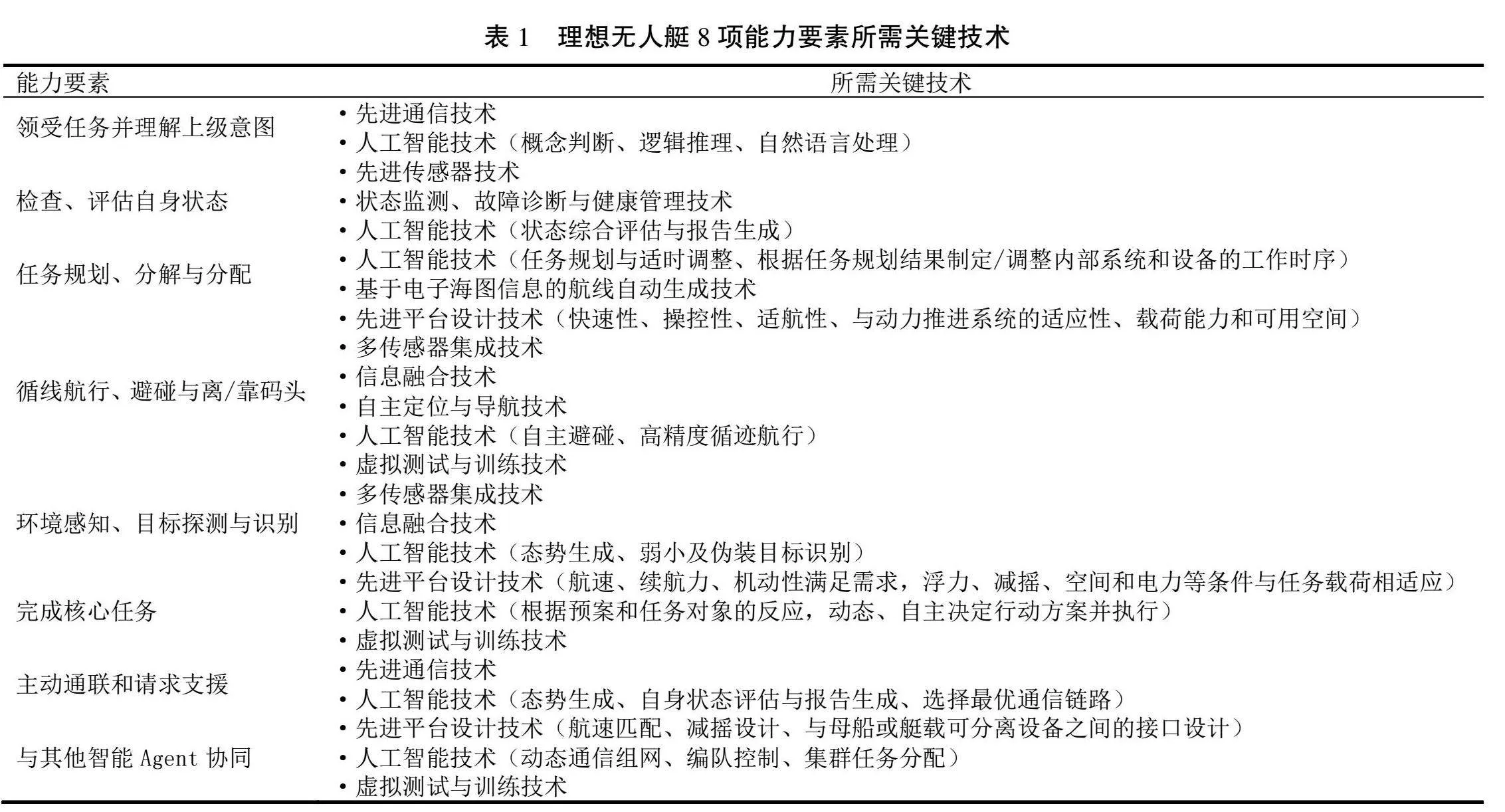
類似地,將上述基于技術-能力映射的分析方法應用于無人艇能力簇的其他7項能力要素,可以分別得到相應的關鍵技術。表1列出了理想無人艇8項能力要素所需關鍵技術分析的結果。
由以上分析可知,想要建造一艘能力要素全面且充分的理想無人艇,需要突破的關鍵技術主要包括:人工智能技術,先進平臺設計技術,先進通信技術,信息融合技術,多傳感器集成技術,狀態監測、故障診斷與健康管理技術,基于電子海圖信息的航線自動生成技術,以及自主定位與導航技術。其中,人工智能技術貫穿所有能力要素,其應用涉及概念判斷、邏輯推理、自然語言處理、狀態綜合評估與報告生成、任務規劃與適時調整、制定/調整工作時序、自主避碰、高精度循跡航行、弱小及偽裝目標識別、決定行動方案并執行、動態通信組網、編隊控制和集群任務分配等諸多方面,是當前制約無人艇走向強人工智能化的最大技術障礙。先進平臺設計技術和虛擬測試與訓練技術的重要程度僅次于人工智能技術,是打造理想無人艇需要持續攻克的兩大技術難題。通信技術、多傳感器集成技術和信息融合技術既是形成感知能力和任務能力的基礎,也是智能系統在使用中積累經驗,實現能力增長的關鍵,必須在現有技術基礎上不斷提高性能,改進設計方法。另外,狀態監測、故障診斷與健康管理技術能有效提高無人艇的在航率和任務可靠性;基于電子海圖信息的航線自動生成技術,以及自主定位與導航技術是保證無人艇則是實現無人艇自主航行所不可或缺的關鍵技術,都必須予以足夠的重視。
4 結束語
具有強人工智能特點的高性能無人艇是世界各國都在競相研發的先進海洋裝備,在民用和軍用領域都有著很高的應用價值和廣闊的應用前景。研發先進的智能無人艇是一項十分復雜的系統工程,需調動廣大科研和技術力量,持續發力,久久為功,方能在重大技術突破方面快人一步,走在國際前沿。本文在充分調研最新文獻關于無人艇關鍵技術需求分析的基礎上,針對現有研究存在的不足,從系統整體的視角出發,完整梳理了無人艇的8項能力要素。根據能力要素與技術支撐之間的廣義映射關系,本文提出了一種基于技術-能力映射的關鍵技術需求分析方法,并利用該方法系統地分析了理想無人艇所需的主要關鍵技術。本文的研究結果可為準備從事無人艇研究的學者和技術人員提供有價值的參考,使其能夠全面、快速、準確理解無人艇的能力要素和關鍵技術需求。
參考文獻:
[1] 桂士宏,鄒念洋,李楠.國外軍用領域人工智能發展規劃及艦船智能化技術運用[J].艦船科學技術,2020,42(13):174-177.
[2] 鮑凌志,杜家輝,胡辛明等.無人艇集群控制技術研究綜述[J].自然雜志,2023,45(3):207-216.
[3] 朱英富,熊治國,袁奕等.現代水面艦船技術發展思考[J].中國艦船研究,2022,17(5):1-8.
[4] 謝偉,陶浩,龔俊斌,等.海上無人系統集群發展現狀及關鍵技術研究進展[J].中國艦船研究,2021,16(1):7-17,31.
[5] 劉志強.基于模型預測控制的無人艇航跡跟蹤策略研究[D].武漢:江漢大學,2023.
[6] 張衛東,劉笑成,韓鵬.水上無人系統研究進展及其面臨的挑戰[J].自動化學報,2020,46(5):847-857.
[7] 平洋,劉文斌,繆正元,等.智能無人艇研究現狀及關鍵問題發展趨勢[J].船舶工程,2023,45(2):61-69.
[8] 邱志明,馬焱,孟祥堯,等.水下無人裝備前沿發展趨勢與關鍵技術分析[J].水下無人系統學報,2023,31(1):1-9.
[9] 李佳佳,王鵬靜,汪曉菲.海洋無人系統智能裝備關鍵技術分析[J].船舶工程,2021,43(3):110-116,145.
[10] 洪瓊,蒲進菁,周立,等.基于無人艇平臺的AUV回收技術發展趨勢[J].水下無人系統學報,2023,31(3):501-508.
[11] 李文戰.無人機無人艇協同跟蹤與著艇方法研究[D].蕪湖:安徽工程大學,2023.
[12] 吳偉.基于無人艇視覺的海上目標跟蹤研究[D].大連:大連海事大學,2023.
[13] 于雙雙.無人艇路徑跟蹤和避障策略的研究及實現[D].大連:大連海事大學,2023.
[14] 齊國慶.基于多傳感器融合SLAM的無人艇自主避障研究[D].鎮江:江蘇科技大學,2023.
[15] 曹想想.基于視覺SLAM的無人艇避障研究[D].鎮江:江蘇科技大學,2023.
[16] 金建海,周則興,張波,等.無人艇航行仿真關鍵技術研究[J].系統仿真學報,2021,33(12):2846-2853.
[17] 于光輝.復雜海區無人艇引導艦船航行問題研究[J].水上安全,2023(10):1-3.
[18] 孫盛智,盛碧琦,劉玉,等.艦載無人艇作戰運用模式及關鍵技術[J].艦船科學技術,2023,45(9):89-93.
[19] 羅榮,周作鵬,王亮,等.海上有人無人分布式協同作戰及關鍵技術分析[J].指揮與控制學報,2023,9(4):372-379.
[20] 趙新路,李兵,陳華,等.島礁無人作戰體系面臨的挑戰及關鍵技術分析[J].無人系統技術,2021,4(2):56-61.
