基于語音控制的智能垃圾桶設計與實現
2024-09-30 00:00:00李慧瑩曾凡歐黃宏泰呂一諾黃婧怡任相花
科技創新與應用 2024年28期
摘 要:該文基于STM32F103C8T6設計一款語音控制的智能垃圾桶系統,主要由數據處理模塊、超聲波測距模塊、舵機驅動模塊和語音識別模塊構成。系統以單片機為核心,運用語音識別傳感器采集聲音信息,通過邏輯處理,單片機能夠智能地下達指令,實現對垃圾桶蓋子的差異化控制。通過實驗操作,驗證系統在語音識別、傳感器準確度以及音量控制方面具有良好的性能。該設計系統結構簡單、易于操作且性能穩定,為垃圾管理提供一種便捷的方式,使用戶可以輕松進行垃圾分類和處理。此外,語音控制技術還減少用戶需要觸摸垃圾桶的機會,從而降低交叉感染的風險。
關鍵詞:單片機;智能垃圾桶;語音識別模塊;舵機驅動;方案設計
中圖分類號:TN912.34 文獻標志碼:A 文章編號:2095-2945(2024)28-0135-04
Abstract: This paper designs a voice-controlled smart trash bin system based on STM32F103C8T6, which mainly consists of a data processing module, an ultrasonic ranging module, a steering gear driving module and a voice recognition module. The system takes a Microcontroller Unit (MCU) as the core and uses a voice recognition sensor to collect sound information. Through logical processing, the MCU can intelligently issue instructions to achieve differentiated control of the lid of the trash can. Experimental operations verify that the system has good performance in voice recognition, sensor accuracy and volume control. The design system has a simple structure, easy to operate and stable performance, providing a convenient way for garbage management, allowing users to easily classify and process garbage. In addition, the voice control technology also reduces the chance that users need to touch the trash can, thereby reducing the risk of cross-infection.
Keywords: MCU; smart trash bin; voice recognition module; steering gear driver; conceptual design
隨著全球城市人口的不斷增加,垃圾產生量也在迅速上升。而傳統的垃圾處理方式已經難以應對日益增長的需求,因此垃圾管理已經成為一個亟待解決的問題。為了減少垃圾對環境的污染和資源的浪費,垃圾分類和回收已成為國際社會的共識。為順應這一趨勢,垃圾桶生產廠家的產品朝著“多樣化”與“智能化”的方向發展。垃圾桶控制系統種類不斷增加,功能也更加豐富,因此智能化垃圾桶也有望成為消費者的消費首選。
對于智能垃圾桶的相關研究,國外在2006年開始實施廢電池和廢玻璃等物品的回收利用,2007年開始嘗試在垃圾桶上使用射頻技術,20SVV4dyF+IcAyyLTOZSU1Xg==14年開始研究智能回收算法,2016年開始深入研究單片機與物聯網。相較之下,我國在2000年時開始研究垃圾桶智能化系統,2009年初步研究全自動智能垃圾分類機,2015年開始探索智能分類垃圾箱,國外學者在解決這些問題時,也嘗試通過行為來改變垃圾投放者的意識[1-2]。
國內在單片機發展方面,周慧珺等[3]提出采用紅外探測和無線接收的方式,實現垃圾桶的自動開合。在智能垃圾桶設計方面,何侃等[4]采用了一種可語音識別的算法,然而驗證結果顯示其成功率較低,仍需進一步改進。傅曉蕓借鑒了國外公共垃圾桶的設計方法,結合產品語義層級、投放引導語義以及參與操作語義3個方面的研究,為垃圾桶的發展提供新的設計思路。
1 系統整體方案設計
本研究在于設計一款基于語音識別的智能垃圾桶系統,幫助用戶輕松辨識垃圾類別,并自動打開相應的垃圾桶蓋。當垃圾桶即將裝滿時,系統自動發出報警提示,提醒用戶處理。使用語音識別模塊接收用戶識別指令,實現對各類垃圾的辨識,主動播報對應的回收類型,并根據垃圾種類的識別結果自動打開相應的垃圾桶蓋。用戶也可通過按鍵開關手動操作,實現對垃圾的智能分類。此外,垃圾桶還能自動監測桶內的狀況,當垃圾桶即將裝滿時,系統通過語音報警提示用戶,并向管理員發送信息,使管理員了解垃圾桶的實時狀況,從而及時進行清理。這一設計旨在減少垃圾桶爆滿的情況發生,避免垃圾外溢,有助于美化環境,更好地促進垃圾分類。
本文的研究主要針對不同種類的垃圾,語音命令識別垃圾,播報提示垃圾所對應的回收類型并打開對應的垃圾桶,也可通過按鍵打開垃圾桶。通過紅外傳感器來監測垃圾桶是否填滿,未滿顯示為綠燈,否則顯示紅燈。在垃圾裝滿后,通過藍牙與揚聲器來提示用戶進行清理。主要研究內容如下。
1)分析用單片機來控制傳統的舵機的原理,對傳統的控制系統進行學習,實現對舵機的控制。
2)通過分析識別聲音的原理建立對應訓練模型,研究語音控制模塊對聲音的識別。
3)根據語音命令不同,自動控制打開對應的垃圾桶蓋。
4)分析使用單片機如何應用紅外傳感器,達成自動監測以及預警的預期功能。
5)研究揚聲器的控制與使用,實現語音播報以及異常狀態提示等信息。
6)對于供電設備的安裝與設計。
7)對于垃圾桶承載狀態的正確運轉狀態顯示與異常狀態的提示。
1.1 控制系統設計
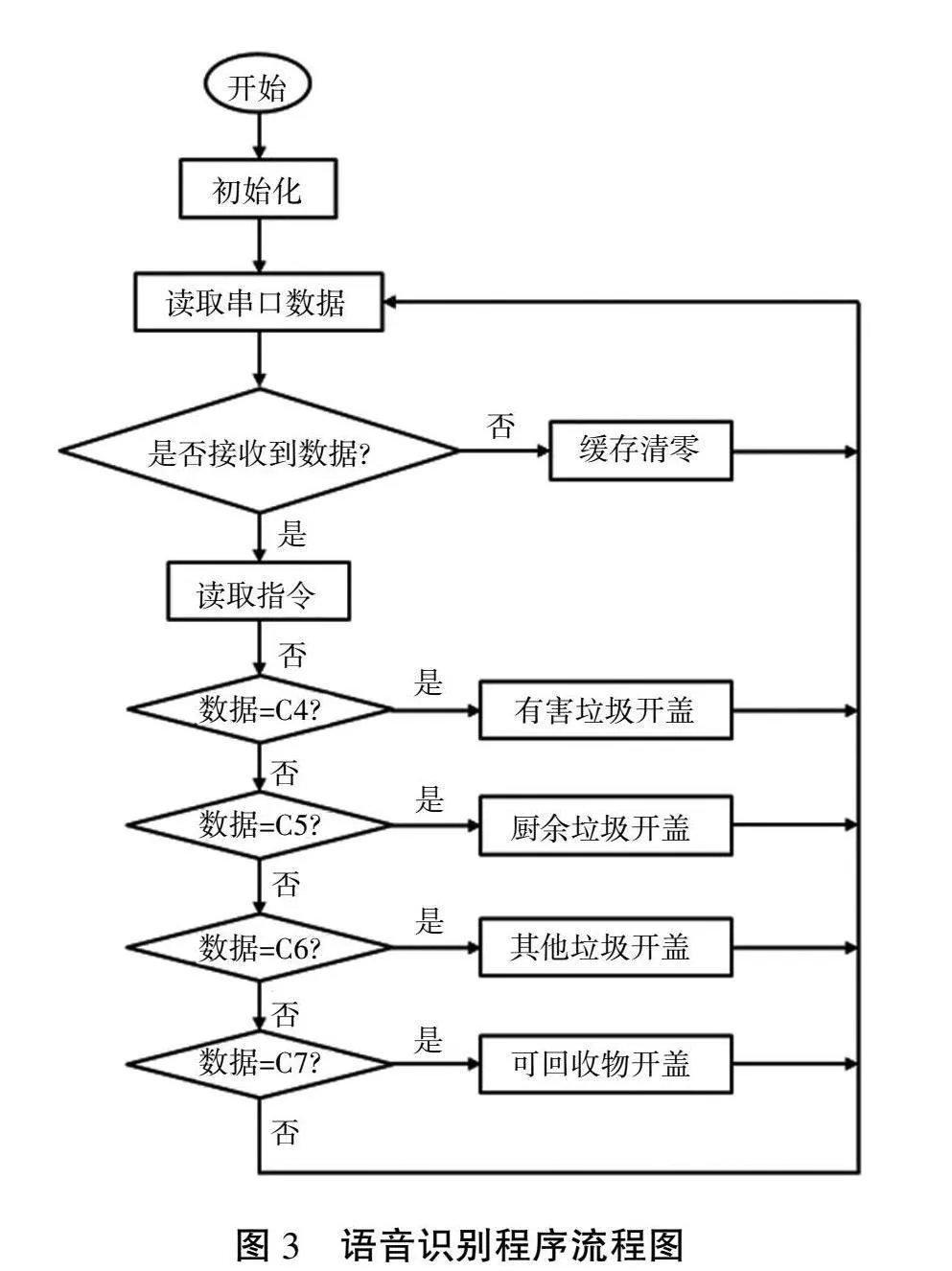
基于語音控制的智能垃圾桶系統需要實現的主要功能有語音命令識別、語音播報、垃圾桶自動開關蓋和狀態指示等,目的是為用戶提供便捷的垃圾投放體驗,并初步隔離垃圾,防止細菌的滋生。該系統的核心元件為STM32F103C8T6單片機,整體框圖如圖1所示。
1.2 系統硬件設計
1.2.1 數據處理模塊
數據處理模塊采用了STM32F103C8T6,通過超聲距離模組及聲音辨識模組生成資料,STM32啟動超音波距離模組,使其在100 ms內完成行程。當輸入端口收到來自超聲波的高電平信號時,判定并算出垃圾箱與前面的障礙物之間的距離。當5個距離的平均值都低于規定的數值時,由STM32進行語音辨識,由STM32進行采集,并以總定時器設定的脈沖寬度為輸入,實現對舵機的旋轉,打開垃圾箱。大約10 s后,重新啟動轉向器,關閉桶蓋。
1.2.2 超聲波測距模塊
該設備采用HC-SR04芯片,共有4根管腳:引腳1為5 V供電,引腳2用于接收MCU所發的啟動信號,引腳3則向STM32輸出對應的高電平,引腳4則與地面相連。當設備工作時, Trig將單片機發出的一個10 ms長的高電平信號作為啟動信號,將超聲發射出去。然后,記錄從傳送到接收所花費的時間,使Echo的等級從低到高,并且根據測量到的距離保持對應的一段對應的時間,當結束時,將該信號降到低水平,執行下一個測量[5-6]。
1.2.3 舵機驅動模塊
舵機是一種位置伺服驅動器,通過控制系統實現精確的角度控制[7]。本文設計采用了SG90舵機,利用支撐臂和齒輪的傳動裝置,將垃圾箱罩與轉向器相連,實現90°旋轉。在從單片機那里收到20 ms的循環信號和0.5 ms(占空比2.5%)高電平的情況下,舵機轉動到0°,這時桶帽是臥式的,完成了垃圾箱的關閉。在從微控制器收到20 ms的周期信號和1.5 ms(占空比7.5%)高電平的情況下,驅動筒蓋旋轉90°,完成打開。
1.2.4 語音識別模塊
本裝置使用了HLV-V20語音識別模塊,該模塊被廣泛應用于各種智能設備上,價格親民且識別率較高。利用SPI通信協議將所辨識的訊號進行初步的處理,并將其通過串行通信方式傳送到MCU,以便對相應的垃圾箱進行控制;并與揚聲器相連以提供語音幫助。本模塊的語音識別語句可隨時進行錄入與刪改,并且語句標識與國家對垃圾分類變化的新標準相適應,使裝置的使用壽命得到提升。同時,考慮到垃圾桶的擺放環境有較多干擾信息,容易造成識別錯誤,所以為了增加識別準確性,在語音系統中附加了一級口令保護[8-9]。
2 系統軟件設計
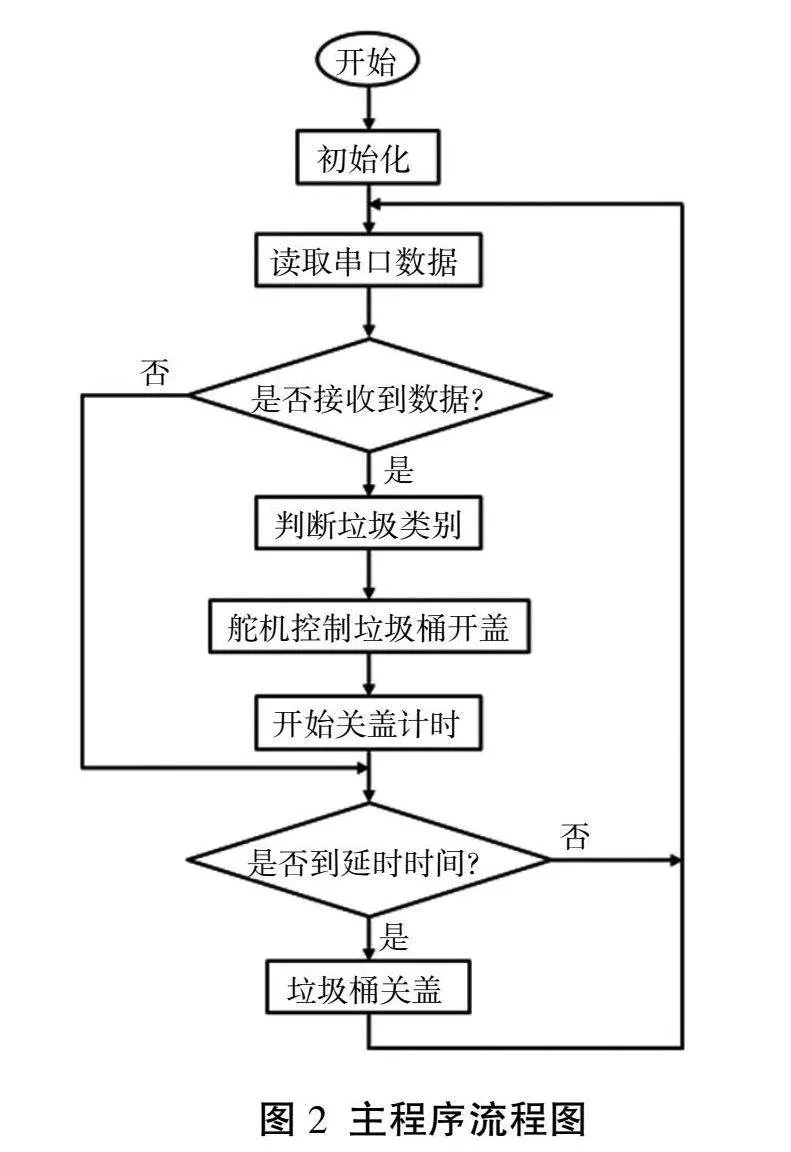
本系統軟件設計采用了模塊化結構,包括語音識別模塊與提示模塊、開關控制模塊以及報警提示模塊。程序由主程序和子程序組成,主程序的主要功能是通過單片機對輸出電路進行控制,以達到智能分類的效果,其流程圖如圖2所示。子程序主要包括舵機子程序設計和語音識別子程序設計。
2.1 舵機子程序設計
舵機的控制信號為PWM信號,通過占空比來改變舵機的位置。為了不影響中斷程序的運行,并且確保軟件在定時中斷期間采集其他的信號,信號采集函數被放置在較長的定時中斷中執行。
智能垃圾桶在開蓋時需要將舵機旋轉到0°,因此將輸出占空比設置為1.5 ms的控制脈沖,關蓋時將舵機旋轉到-90°,輸出占空比為0.5 ms的控制脈沖。要使舵機轉動到左側最邊緣,需要設定2 ms的正脈沖,18 ms的負脈沖。在起始條件下,該控制端口發出高電平信號,設定計時器在2 ms之后出現一個中斷,在該中斷出現之后把控制器的接口設置成了一個較小的電平,并把其中斷時間設置成18 ms。在經過18 ms之后,切換到新的時序中斷,把控制端口設置成高電平,把計時器的初值設置成2 ms,然后等待下一次的中斷,通過循環,實現PWM信號到舵機的輸出過程。
2.2 語音識別子程序設計
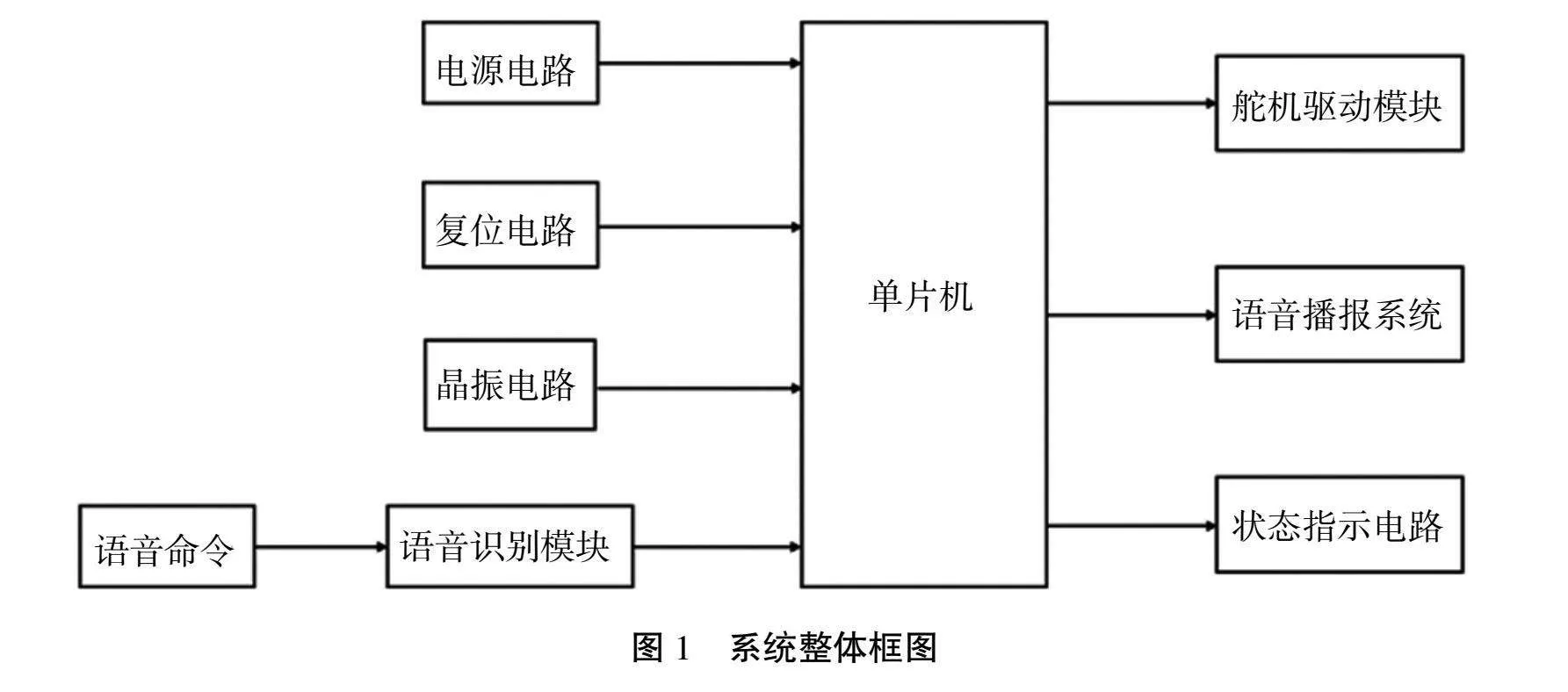
HLK-V20模塊在32位RSIC結構中引入了DSP芯片,實現了對數字信號的分析、聲音的辨識、浮點計算的FPU操作、FFT加速等功能。在此基礎上,提出了一種基于人工神經網絡的語音識別方法。模塊的系統外設包括UART/I2C/SPI/PWM/I2S/DAC/GPIO/DMic/AMic,用于實現語音識別/聲控/人機對話功能。語音識別程序流程如圖3所示。
3 實驗結論
經過實驗驗證,本裝置對于不同種類的垃圾,能做出不同的反應,語音命令識別垃圾,語音信息通過語音識別模塊進入STM32里。STM32首先對語音信息進行分類分析,能進行播報提示垃圾所對應的回收類型,與此同時相應的垃圾桶打開,在液晶顯示模塊檢測所得數據直觀地顯示出來,也可以通過按鍵自行打開垃圾桶。垃圾桶通過紅外傳感器監測是否填滿,用紅燈綠燈、藍牙和揚聲器來提示用戶垃圾桶是否填滿的信息,從而進行及時的清理。經過實驗驗證,系統在語音識別、傳感器準確度以及音量控制等對垃圾桶控制方面具有良好的性能。
4 總結與展望
基于語音控制的智能垃圾桶設計代表了現代科技在環境保護和生活便捷性方面的創新應用,旨在提高垃圾分類和管理的效率,減少資源浪費,促進環境可持續性。本文介紹了該系統的核心組成部分和工作原理,包括數據處理模塊、超聲波測距模塊、舵機驅動模塊和語音識別模塊。通過實驗操作,驗證了系統在語音識別、傳感器準確度以及音量控制方面具有良好的性能。其創新之處主要體現在以下3個方面。
首先是將語音識別技術的有機結合,利用語音識別技術來與智能垃圾桶進行交互,用戶只需通過語音告訴垃圾桶要丟棄的垃圾類型,而不需要手動打開垃圾桶或觸摸傳感器,無須觸碰或按壓按鈕。
其次是語音識別的準確與智能化創新,需要高度準確的語音識別算法。先進的自然語言處理技術和智能分類算法確保垃圾被正確分類,減少錯誤投放。語音識別技術也可以與其他智能家居或智能城市系統進行整合,進一步提高其擴展性和適應性。
最后則是對于用戶體驗的收集反饋再使用,語音識別技術的應用還可以用于收集用戶口頭指令的數據,這些數據可以用于分析用戶的投放習慣、垃圾種類的頻率分布等信息。
總之,基于語音控制的智能垃圾桶設計為垃圾管理領域帶來了創新,提高了效率和便捷性。未來,隨著技術的不斷發展和改進,我們可以期待這一領域的進一步突破和應用,為環境保護和城市管理提供更多的解決方案。
參考文獻:
[1] 戴蒙.英國試驗太陽能壓縮式垃圾桶[J].環衛科技網,2011(3):6-7.
[2] 虢莉娟.云計算在遠程教學信息系統中的應用研究[J].信息記錄材料,2021,22(11):179-181.
[3] 周慧珺,許錦標.新型智能垃圾桶的設計方案[J].廣東工業大學學報,2006(3):85-88,94.
[4] 何侃,田亞清,李強,等.基于LD3320的語音識別智能垃圾桶設計[J].國外電子測量技術,2015,34(6):85-88.
[5] FELIP G, JORDI L. Emilio Gil Performance of an Ultrasonic Ranging Sensor in Apple Tree Canopies[J].Sensors,2011(3):2460-2477.
[6] QUEIROS R, ALEGRIA F C, GIRAO P S, et al. Cross-correlation and sine-fitting techniques for high-resolution ultrasonic ranging[J]. IEEE Transactions on Instrumentation and Measurement,2010,59(12):3227-3236.
[7] 鄭振杰,江衍煊,游德智.單片機結合ULN2003驅動步進電機[J].電機技術,2010(6):44-46.
[8] 孔明,侯蕊,趙軍.基于FPGA的語音識別系統[J].儀表技術與傳感器,2013(6):78-83.
[9] 王春武,劉春玲,秦政坤,等.基于WT588D模塊的語音播報系統設計[J].電子技術應用,2012,38(1):115-117,121.
