基于緩解交通擁堵路況的信號燈配時及道路導向優化研究
2024-10-06 00:00:00張天宇趙玉婷梁辰連蘭蘭
物流科技 2024年18期


摘 要:隨著城市化進程的不斷推進,交通擁堵問題成為影響城市居民生活和企業運營的主要挑戰之一。文章旨在通過優化城市交叉口紅綠燈時序,改善城市交通擁堵狀況,提高交通流暢性和安全性。紅綠燈作為交通控制的關鍵因素,其時序規劃的合理性直接關系到城市交通系統的運行效率。為了應對城市交通的復雜性和多樣性,文章構建了一個綜合考慮機動車、行人和非機動車等多種交通參與者的微觀交通仿真模型,通過數學公式和遺傳算法進行優化,旨在找到最佳的紅綠燈時序配置,以實現交通系統的最優化。文章的仿真實驗選取了城市實際交叉口為案例,通過調整紅綠燈時序觀察交通流的變化,驗證了模型和算法的有效性。通過研究發現,優化紅綠燈時序不僅能夠改善交通擁堵問題,提高交通流暢性,還能保障行人及非機動車的交通安全,這為未來城市的可持續發展和居民的出行提供了有益的參考和指導。
關鍵詞:紅綠燈時序;交通系統;運行效率;仿真實驗;可持續發展
中圖分類號:F49;U491 文獻標志碼:A DOI:10.13714/j.cnki.1002-3100.2024.18.023
Abstract: With the continuous advancement of urbanization, traffic congestion has become one of the main challenges affecting the lives of urban residents and business operations. The aim of this study is to improve urban traffic congestion, traffic smoothness, and safety by optimizing the timing of traffic lights at urban intersections. As a key factor in traffic control, the rationality of the timing planning of traffic lights directly affects the operational efficiency of urban transportation systems. In order to address the complexity and diversity of urban traffic, this paper constructs a micro traffic simulation model that comprehensively considers various traffic participants such as motor vehicles, pedestrians, and non motor vehicles. Through mathematical formulas and genetic algorithms, the model is optimized to find the optimal timing configuration of traffic lights and achieve the optimization of the transportation system. The simulation experiment in this article selected an actual urban intersection as a case study, and verified the effectiveness of the model and algorithm by adjusting the timing of traffic lights to observe changes in traffic flow. Through research, it has been found that optimizing the timing of traffic lights can not only improve traffic congestion and smoothness, but also ensure the safety of pedestrians and non motorized vehicles. This provides useful reference and guidance for the sustainable development of cities and the travel of residents in the future.
Key words: traffic light timing; transportation system; operating efficiency; simulation experiments; sustainable development
0 引 言
隨著城市化進程的不斷推進,城市交通問題逐漸嚴峻。交通擁堵、交通事故和環境污染等問題不僅嚴重影響著居民的出行體驗,還對城市的可持續發展提出了挑戰。根據中國社會科學院和其他相關機構的研究,交通擁堵對城市經濟和社會造成的成本因多種因素而異。這些因素包括城市的規模、交通擁堵的程度、交通管理措施的效果等。具體成本會根據這些因素而有所不同。一般來說,交通擁堵會產生時間浪費、燃料消耗增加、環境污染加劇、交通事故風險增加等,從而對城市的經濟和生活質量產生負面影響。這些影響會導致直接和間接的成本。其中直接成本包括交通時間損失、燃料費用增加、運輸成本增加等。而間接成本包括環境污染治理費用、醫療費用、交通事故處理費用等。紅綠燈作為交通控制的城市道路“指揮官”,對交通的流暢性和安全性起著關鍵作用。其中包含通過指示紅綠燈狀態,控制道路上車輛的流動,協調不同方向的交通流量,以防止交通擁堵和事故發生,幫助車輛和行人有序通行,避免交通混亂;它們提供清晰的信號,確保車輛和行人在適當的時候停車和通行,減少了交通沖突和碰撞的機會;它們提供行人過馬路的安全時機,可以優化交通流動,減少交通擁堵,提高道路通行效率,這有助于節省時間和燃料成本;同時,也可以降低車輛的怠速時間,從而減少尾氣排放和環境污染。因此,尋求一種智能、綠色和低碳的城市交通管理理念變得至關重要。
1 相關研究回顧
1.1 交通信號燈控制系統相關研究
城市交通擁堵已經成為國內外交通管理者和學者的研究焦點,在現有的研究上面,主要分為兩個方面,一是交通信號燈控制系統研究方面,張健提出了基于ZigBee在交通信號燈上的應用,在固定配時的基礎上,對信號燈配時及機動車道路選擇提供方案,可以改善道路的擁堵情況,但該方法適用于宏觀調控,不適用于單條或幾條道路的調控[1];趙曉華等將混雜系統理論應用在交通信號燈系統控制上,通過仿真尋找最佳燈色切換時刻和最佳次序,但該算法只局限探究平均排隊時長,并沒有綜合考慮每相位車道不同方向的燈色時間[2];張迪提出交通信號燈控制的智能算法,即車流量越大,綠燈時間越長的算法以保證交通暢通,但該觀點只適用于城市非主干路,對輻射交通網絡沒有影響[3];陳漢祿等研究干線協調下行人固定請求的信號燈控制應用,為保證行人安全過街,且對機動車影響較小而設計了請求控制算法并進行仿真,該研究對象主要為行人,并對緩解交通擁堵起顯著作用[4]。
1.2 交通信號燈配時相關研究
二是交通信號燈配時研究方面,Wei等通過大量實地調研和仿真實驗,采用傳統調度方法嘗試優化交通,但面對城市交通的復雜性,效果不是十分顯著[5];Loder等提出TRRL配時法,重點考慮車輛延誤時間,對紅綠燈進行固定配時,但不適用于擁堵路段[6];李巖等基于NSGA算法研究過飽和狀態下的交通信號燈配時,但并未考慮行人及非機動車的安全通行情況[7];陶超等以降低車輛延誤為目標,采用模糊控制理論對交通信號燈的順序和燈色進行配時調整,并設計算法以彌補模糊控制理論的缺陷,但不能兼顧更多的交通參數[8];吳妮提出一種車輛擁堵路口自適應信號燈配時的框架,以二氧化碳排放量最低為目標進行優化求解,運用遺傳算法,對不同交通情況的路口設計相應的交通信號燈配時方案,但該方法需要多次迭代實驗進行動態調整,并不適用于目前城市道路的實際情況[9]。
綜上所述,目前國內外學者對交通信號燈的研究對象多為系統控制及配時,鮮有綜合考慮四相車道并且每相車道具有不同方向交通信號燈配時的問題,故本文旨在研究考慮多個車道方向,且兼顧行人和非機動車通行問題,合理分配各信號燈配時及次序,以降低交通擁堵,改善城市交通。
2 問題描述
隨著城市化進程的不斷推進,城市交通擁堵問題逐漸凸顯,因此,尋找有效的交通管理手段成為當前城市規劃和發展的迫切需求之一。紅綠燈作為城市交通控制系統的重要組成部分,直接影響車輛、行人和非機動車在路口的通行效率。合理優化紅綠燈時間,不僅可以有效提高交通流暢性,減少擁堵,還有助于增加交通安全性和改善城市交通效率。因此,本研究旨在通過優化紅綠燈時間,探索一種可行的方法來改善城市交通擁堵情況。
首先,本文考慮了城市交通系統的復雜性,包括機動車、行人和非機動車等多種交通參與者。在這個多元化的背景下,本文重點關注紅綠燈時序規劃對不同交通參與者的影響,以及如何通過調整時序來實現交通流暢和交通安全的平衡。然后,綜合考慮車輛流量、車道數、行人數量、非機動車數量以及機動車數量等多個因素,構建微觀交通仿真模型,并考慮不同車輛的通行速度、流量等動態因素。最后進行算法設計及仿真實驗。
因此,本文的問題可描述為:針對某個車流量較大的交通路口,在一個紅綠燈時間周期之內(從某一個方向的紅燈剛熄滅,綠燈剛亮起的瞬間開始計時,期間所有紅綠燈均經歷綠燈亮起、紅燈亮起的過程,直到計時的第一個綠燈再次亮起時為一個交通周期),已知該路口在整個交通周期的機動車數量、非機動車數量及行人數量、車輛及行人行駛最低速度和平均速度、車道數量及方向等相關信息,以單個交通周期內保證絕大多數的車輛及行人均能通過路口的前提下,交通時間周期最短、各路口紅綠燈時間安排合理為目標函數,建立微觀交通仿真模型,最終給出為保證各個路口的車輛通過率,各個方向指示綠燈時間安排及道路指向的規劃。
3 數學模型
3.1 模型假設
本文在主干路交通信號燈調控優化的過程中,由于單個路口的交通情況所產生的影響會輻射一片區域,甚至整個交通網絡,故本文作出如下假設。
第一,模型所優化的交通信號燈只對該路口的交通情況產生主要影響,因控制整個交通周期總長波動較小,所以不考慮對周邊輻射區域的影響;
第二,模型中機動車輛、非機動車輛、行人反應及速度基本保持一致;
第三,模型中不考慮特殊情況,例如肇事、車輛拋錨等影響交通的情況;
第四,所有車輛、行人均遵守交通信號燈指揮通行。
3.2 符號參數
3.3 模型構建
3.3.1 目標函數
其中,目標函數是最小化車輛、行人和非機動車的通行時間,同時確保絕大多數車輛可以在保證安全的前提下通過路口;代表機動車輛的通行時間;代表行人的通行時間;代表非機動車的通行時間。
3.3.2 約束條件
其中,式(2)表示交通周期約束,即所有車道的周期時間之和不應超過交通周期;式(3)表示綠燈時間足夠長的約束:確保每個車道的綠燈時間足夠長,以滿足機動車的通行時間,同時不浪費時間,確保行人和非機動車有足夠的時間通行,緩解交通壓力。其中,是每個車道的最小綠燈時間,以確保行人和非機動車有足夠的時間來通行;式(4)為交通流量平衡:確保每個車道上的車輛流量在合理范圍內;式(5)為交通安全約束:考慮交通安全,確保通行時間不會導致交通事故。添加約束,限制車道上的通行速度。是每個車道上的最大允許速度,以確保安全通行;式(6)為通行時間差異約束:考慮不同車道上車輛通行時間的差異,約束以限制通行時間差異。和分別表示車道上通行時間的最大值和最小值,是允許的通行時間差異;式(7)為紅綠燈協調約束:確保機動車、行人和非機動車的綠燈時間協調,以避免通行沖突;式(8)為行人和非機動車綠燈時間約束:當紅燈亮起時,行人和機動車綠燈時間應足夠長,以確保行人通行。
4 算法設計
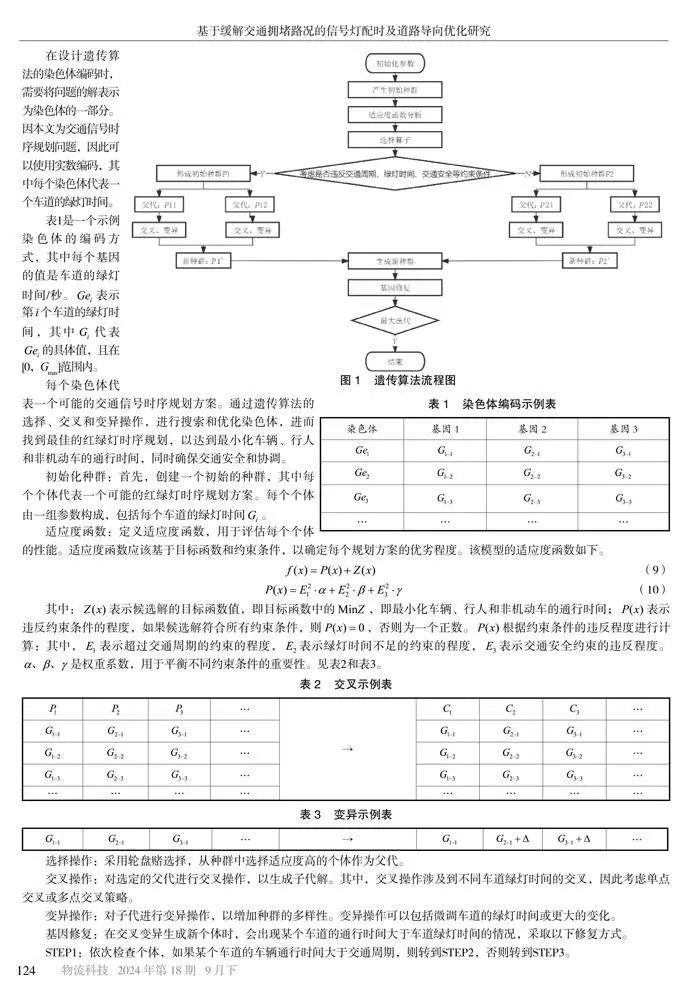
本文的數學模型為混合整數線性規劃模型,考慮到本文計算量較大,依據模型的特點,設計了改進遺傳算法,通過考慮違反交通周期、綠燈通行時間、交通安全等約束條件的程度形成新種群,再進行交叉變異,最后得出結果,具體流程見圖1。
在設計遺傳算法的染色體編碼時,需要將問題的解表示為染色體的一部分。因本文為交通信號時序規劃問題,因此可以使用實數編碼,其中每個染色體代表一個車道的綠燈時間。
表1是一個示例染色體的編碼方式,其中每個基因的值是車道的綠燈時間/秒。表示第個車道的綠燈時間,其中代表的具體值,且在[0,Gmax]范圍內。
每個染色體代表一個可能的交通信號時序規劃方案。通過遺傳算法的選擇、交叉和變異操作,進行搜索和優化染色體,進而找到最佳的紅綠燈時序規劃,以達到最小化車輛、行人和非機動車的通行時間,同時確保交通安全和協調。
初始化種群:首先,創建一個初始的種群,其中每個個體代表一個可能的紅綠燈時序規劃方案。每個個體由一組參數構成,包括每個車道的綠燈時間。
適應度函數:定義適應度函數,用于評估每個個體的性能。適應度函數應該基于目標函數和約束條件,以確定每個規劃方案的優劣程度。該模型的適應度函數如下。
其中:表示候選解的目標函數值,即目標函數中的,即最小化車輛、行人和非機動車的通行時間;表示違反約束條件的程度,如果候選解符合所有約束條件,則,否則為一個正數。根據約束條件的違反程度進行計算:其中,表示超過交通周期的約束的程度,表示綠燈時間不足的約束的程度,表示交通安全約束的違反程度。是權重系數,用于平衡不同約束條件的重要性。見表2和表3。
在實施這個改進的遺傳算法時,應設置合適的參數,以確保算法能夠有效地搜索解空間,進而找到最佳的紅綠燈時序規劃方案,以實現交通流的優化和緩解城市交通壓力。
5 仿真模型
5.1 微觀交通仿真模型設計
依據模型及算法的特點,本文采用微觀交通仿真模型[11],微觀交通仿真模型是一種用于模擬城市道路交通中各種交通參與者(如車輛、行人、自行車等)的行為和互動的復雜計算模型。它模擬交通系統中每個個體的行動,以便更好地了解交通流量、擁堵、事故等情況,用于優化交通控制策略和基礎設施規劃。微觀交通仿真模型通常使用計算機程序來實現[12],以模擬大規模的交通網絡并分析不同情景下的交通表現。這些模型對于城市規劃師、交通工程師和交通管理部門來說是強大的工具,可以幫助他們制定更有效的交通控制策略,提高道路安全性,減少擁堵,提高交通效率,以滿足不斷增長的城市交通需求。
以下是一些微觀交通仿真模型所使用的關鍵元素和原理[13]。
車輛模型:微觀交通仿真模型通常包括車輛模型,模擬車輛的運動和駕駛行為。這些模型考慮了車輛的加速、減速、換道、速度限制等因素,以模擬車輛在道路上的行駛。
行人模型:如果仿真模型考慮了行人的影響,它還會包括行人模型,模擬行人的行走行為和交叉路口的穿越。行人模型通常涉及行人的速度、密度、目標位置和行走路徑選擇等因素。
信號控制模型:微觀交通仿真模型通常還包括信號控制模型,模擬紅綠燈和交通信號的運作。這些模型決定交通信號何時變化,以及每個方向的綠燈和紅燈的時間。
道路網絡模型:道路網絡模型用于表示城市道路網絡的拓撲結構和連接關系。這有助于確定車輛和行人的路徑選擇以及模擬道路容量和擁堵情況。
交互行為:微觀交通仿真模型考慮了交通參與者之間的相互作用。這包括車輛之間的交互、車輛與行人之間的交互,以及交通信號與交通參與者之間的交互。這有助于模擬復雜的交通場景,如擁堵、事故等。
數據輸入:仿真模型需要大量的輸入數據,如道路屬性、交通流量、速度限制、事故數據等。這些數據用于初始化模型和進行仿真實驗。
輸出和評估:模型輸出包括模擬交通流量、擁堵情況、行程時間、事故概率等信息。這些輸出用于評估不同策略的效果,優化交通控制和基礎設施規劃。
5.2 仿真流程
STEP1:數據收集和預處理。仿真的第一步是收集所需的數據,包括道路網絡信息、交通流量數據、速度限制、信號控制信息等。這些數據通常來自交通監測設備、地理信息系統(GIS)、歷史交通數據等。數據預處理包括清理和格式化數據以供仿真使用。
STEP2:模型構建。根據收集到的數據,構建微觀交通仿真模型,包括道路網絡、車輛模型、行人模型、信號控制模型等。這些模型用于模擬交通參與者的行為和道路網絡的拓撲結構。
STEP3:仿真實驗設計。在仿真實驗之前,需要明確研究的目標和問題。確定實驗的輸入參數,如交通流量、信號時序、道路容量等,以及模擬的時間段和區域。
STEP4:仿真運行。利用仿真工具運行模型,模擬交通參與者的行為和道路交通的演變。模擬運行的時間可以是分鐘、小時,甚至是一天的交通情景,具體取決于研究的范圍和問題。
STEP5:數據分析。在仿真運行完成后,收集和分析輸出數據。這包括交通流量、擁堵情況、行程時間、事故率等信息。分析結果用于評估不同策略和情景的效果。
STEP6:策略優化。基于仿真結果,可以進行策略優化,如調整信號時序、道路規劃、交通管理策略等,以改善交通效率、安全性和流暢性。
STEP7:報告和決策支持。最終的仿真結果和優化策略可以用于報告編制和決策支持。城市規劃師、交通工程師和交通管理部門可以根據仿真結果來制定政策和規劃基礎設施。
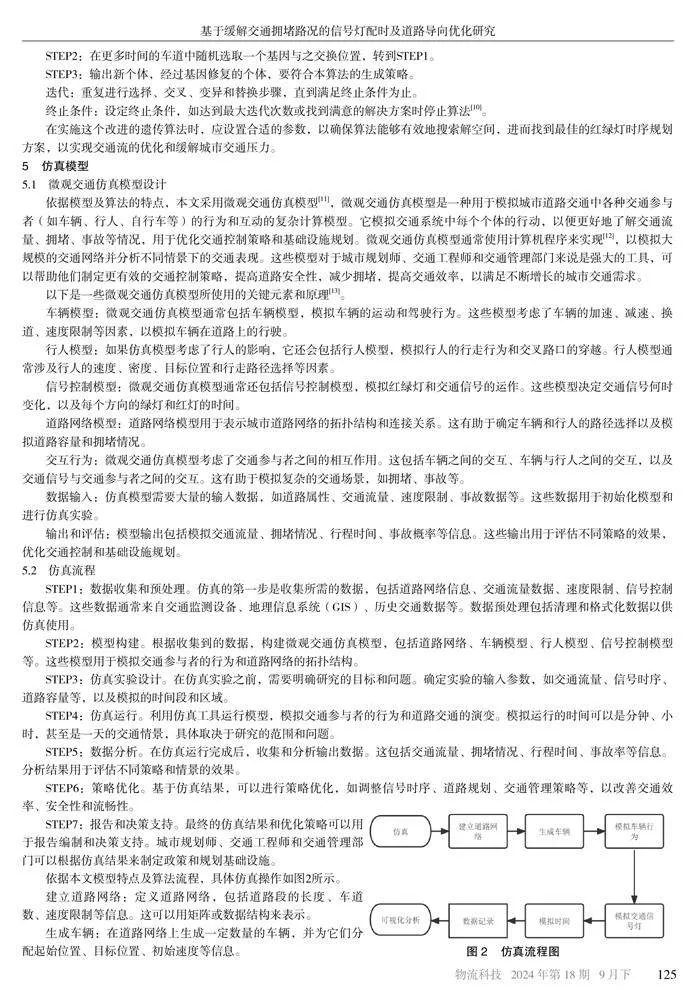
依據本文模型特點及算法流程,具體仿真操作如圖2所示。
建立道路網絡:定義道路網絡,包括道路段的長度、車道數、速度限制等信息。這可以用矩陣或數據結構來表示。
生成車輛:在道路網絡上生成一定數量的車輛,并為它們分配起始位置、目標位置、初始速度等信息。
模擬車輛行為:對每輛車輛進行模擬,包括車輛的加速、減速、換道等行為。可以使用車輛動力學模型(如加速度-速度模型)來描述車輛的行為。
模擬交通信號:如果有交通信號控制,需要模擬信號的變化,以決定交叉路口的車輛通行權。
時間步進:模擬運行的時間步進,逐步更新車輛的位置和速度,同時考慮交通信號的變化。
數據記錄:記錄仿真期間的各種數據,如車輛位置、速度、行程時間等。
可視化和分析:利用MATLAB的可視化工具和數據分析功能,繪制交通流量、擁堵情況等圖表,以分析仿真結果。
其中,設置車道數為4條,分別代表十字路口四個方向的車道,種群大小為50,迭代最大次數為100次,交通周期時間為120秒,機動車數量為100輛,車輛最大速度為60千米/小時,允許通行時間差異為10秒,行人數量和通行速度分別為100人、3千米/小時,非機動車數量和通行速度分別為50輛、6千米/小時,根據以上參數進行MATLAB仿真。最優解如表4所示。遺傳算法收斂見圖3。
6 算例實驗
以某城市主干路其中一個交叉口車流量為例,該交叉路口交通周期共12排車道,四個方向車道共3排,其中每個方向的車道分別有左轉、直行、直行及右轉三條車道(右轉通行不受紅綠燈限制),如圖4所示。
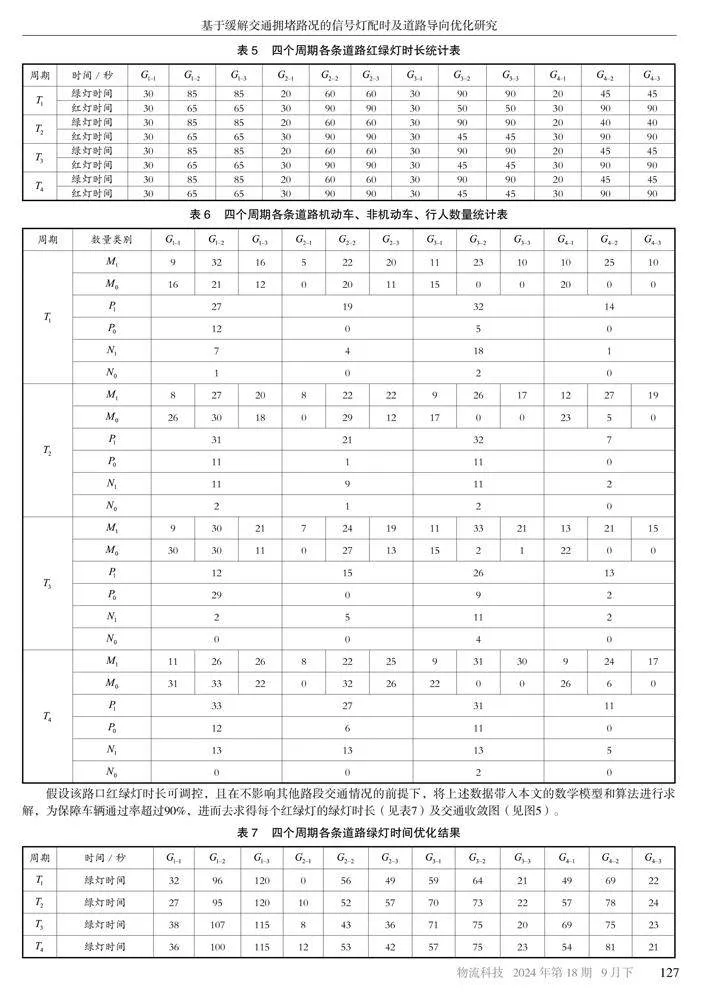
通過對該十字路口交通信號燈的紅綠燈時間觀察,記錄每個路口的紅綠燈時長,見表5。
自紅燈剛開啟至下個紅燈亮起為單個周期,統計出四個周期各個車道內綠燈期間通過的機動車數量、行人數量、非機動車數量,以及單個周期內未通過的機動車數量、行人數量和非機動車數量,如表6所示。
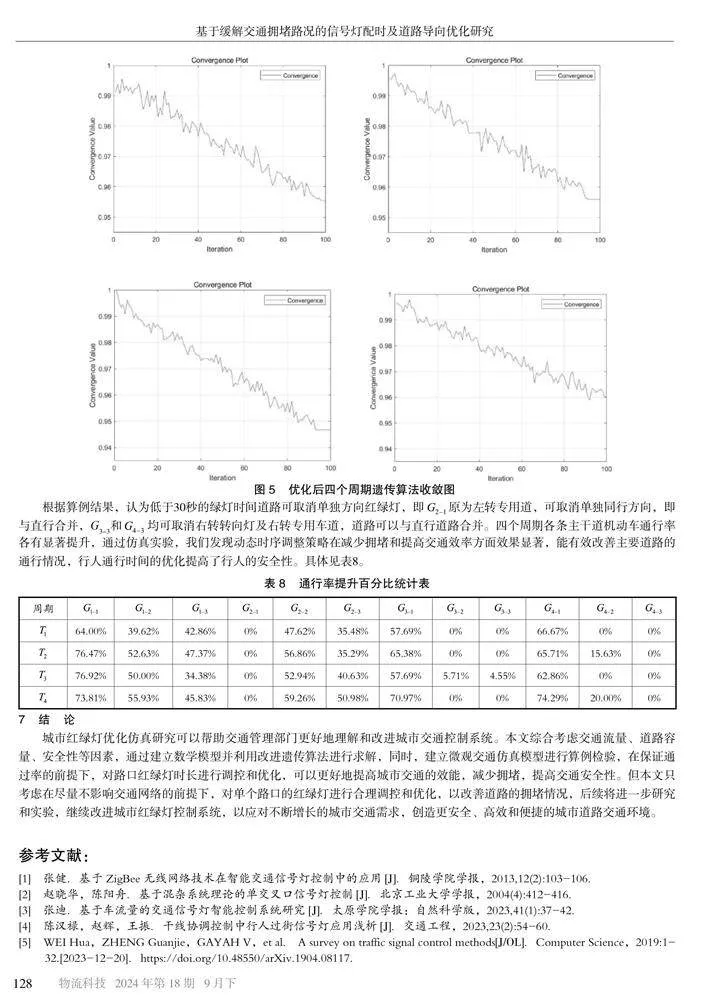
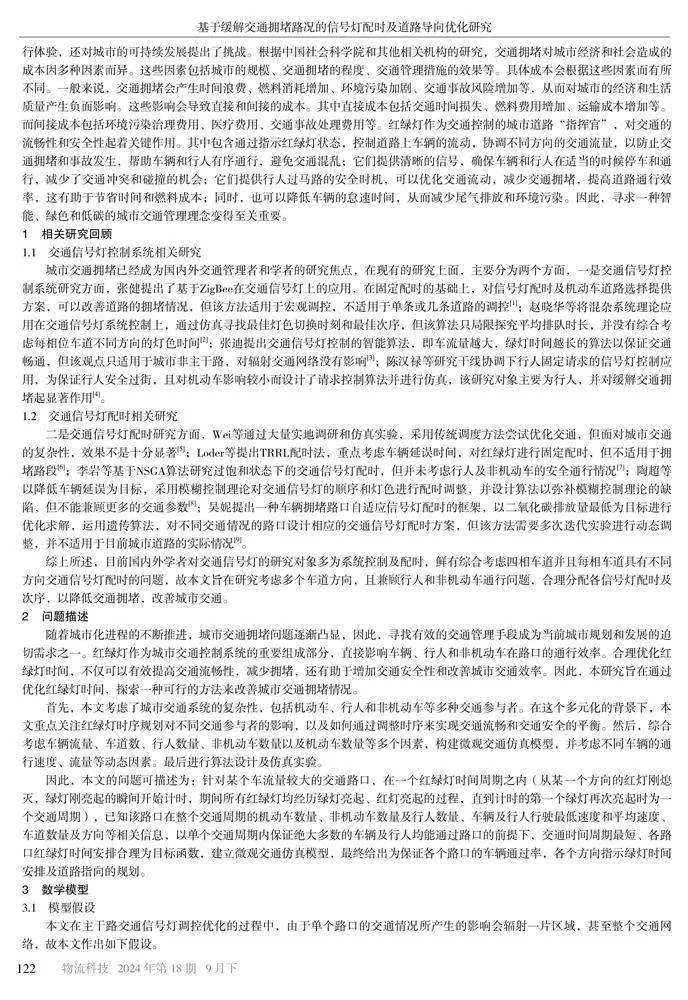
假設該路口紅綠燈時長可調控,且在不影響其他路段交通情況的前提下,將上述數據帶入本文的數學模型和算法進行求解,為保障車輛通過率超過90%,進而去求得每個紅綠燈的綠燈時長(見表7)及交通收斂圖(見圖5)。
根據算例結果,認為低于30秒的綠燈時間道路可取消單獨方向紅綠燈,即原為左轉專用道,可取消單獨同行方向,即與直行合并,G3-3和均可取消右轉轉向燈及右轉專用車道,道路可以與直行道路合并。四個周期各條主干道機動車通行率各有顯著提升,通過仿真實驗,我們發現動態時序調整策略在減少擁堵和提高交通效率方面效果顯著,能有效改善主要道路的通行情況,行人通行時間的優化提高了行人的安全性。具體見表8。
7 結 論
城市紅綠燈優化仿真研究可以幫助交通管理部門更好地理解和改進城市交通控制系統。本文綜合考慮交通流量、道路容量、安全性等因素,通過建立數學模型并利用改進遺傳算法進行求解,同時,建立微觀交通仿真模型進行算例檢驗,在保證通過率的前提下,對路口紅綠燈時長進行調控和優化,可以更好地提高城市交通的效能,減少擁堵,提高交通安全性。但本文只考慮在盡量不影響交通網絡的前提下,對單個路口的紅綠燈進行合理調控和優化,以改善道路的擁堵情況,后續將進一步研究和實驗,繼續改進城市紅綠燈控制系統,以應對不斷增長的城市交通需求,創造更安全、高效和便捷的城市道路交通環境。
參考文獻:
[1] 張健.基于ZigBee無線網絡技術在智能交通信號燈控制中的應用[J].銅陵學院學報,2013,12(2):103-106.
[2] 趙曉華,陳陽舟.基于混雜系統理論的單交叉口信號燈控制[J].北京工業大學學報,2004(4):412-416.
[3] 張迪.基于車流量的交通信號燈智能控制系統研究[J].太原學院學報:自然科學版,2023,41(1):37-42.
[4] 陳漢祿,趙輝,王振.干線協調控制中行人過街信號燈應用淺析[J].交通工程,2023,23(2):54-60.
[5] WEI Hua,ZHENG Guanjie,GAYAH V,et al. A survey on traffic signal control methods[J/OL].Computer Science,2019:1-32.[2023-12-20].https://doi.org/10.48550/arXiv.1904.08117.
[6] LODER A,AMBüHL L,MENENDEZ M,et al.Understanding traffic capacity of urban networks[J/OL].Scientific reports,2019,9(1):16283.[2023-11-25].https://doi.org/10.1038/s41598-019-51539-5.
[7] 李巖,過秀成,陶思然,等.基于NSGA-Ⅱ算法的過飽和狀態交叉口群交通信號配時優化[J].東南大學學報(英文版),2013,29(2):211-216.
[8] 陶超,李超,趙騫,等.基于模糊控制的城市單交叉口信號燈配時優化[J].湖州師范學院學報,2016,38(2):19-23.
[9] 吳妮.城市過飽和路口信號配時方法研究[D].武漢:華中師范大學,2018.
[10] 任年魯,袁逸萍,戴毅,等.基于改進遺傳算法的環形RGV系統調度優化[J].機械設計與制造,2023(4):1-5.
[11] ABK K,FUJII H,YOSHIMURA S.Efficient origin-destination estimation using microscopictraffic simulation with restrictedrerouting[J]. Computer Modeling in Engineering & Sciences,2023,135(2):1091-1109.
[12] CAPEK K,KOSONEN I,LUTTINEN R T.Sink&source – An approach for real-time corrections of an online microcopictraffic simulation[C]//13th World Congress and Exhibition on Intelligent Transport Systems(ITS) and Services.London,UK,8-12 October,2006.
[13] BARCELO J,CASAS J.Heuristic dynamic assignment based on microscopic traffic simulation[J/OL].Computer Science,Engineering,1964(1):1-12.[2024-11-25].https://api.semanticscholar.org/CorpusID:199409591.