無人機運動軌跡跟蹤系統的設計研究
2024-10-09 00:00:00李丁丁
電子產品世界 2024年9期

關鍵詞:無人機;軌跡跟蹤系統;北斗通信
中圖分類號:TP273;TN99;V249.1 文獻標識碼:A
0 引言
無人機在大多數場合都需要沿期望軌跡連續、準確地飛行,但傳統的控制方法很難達到這種效果,因此自動準確地跟蹤和管理飛行軌跡的能力是無人機的必備技能。由于無人機具有非線性、前驅動、強耦合等特性,傳統的控制方法難以實現動態性能指標[1]。北斗通信系統由空間段、陸地段和用戶段組成,為全球用戶提供定位和導航服務,具有高精度傳輸和通信能力。為了有效應對外部環境擾動和自參數不確定性對無人機的影響,本文設計了基于北斗的新型無人機運動軌跡跟蹤系統。
1 基于北斗通信技術的協議格式定義
1.1 業務數據報文
業務數據報文即無人機軌跡數據協調報告。在北斗通信中,由于相鄰節點距離小,數據包的收集面臨一定的挑戰。在實際應用場景中,為確保系統運行順暢與準確,北斗短報文設備與軌跡控制主機的配置數量需保持一致。無人機路線數據傳輸單一,僅由數據庫主機對這些數據進行存儲,因此存儲過程必須遵循業務數據報文規范。
1.2 運維報文
在無人機軌跡跟蹤控制系統的構建與運作過程中,運維報文作為該系統的核心要素,對保障系統通信數據的傳輸能力具有至關重要的作用。在明確既定數據消息傳輸起始點與終止點的前提下,運維報告中的數據參數數量與其對實時傳輸通信信息能力的強化效果,呈現顯著的正相關關系。初始通信位置決定了操作參數和維護報告的最低規范條件[2]。在北斗通信技術的支持下,每架無人機運行軌跡的起始點均被嚴格設定為傳輸運維報告的首要基準坐標。此外,關于傳輸終止位置的確定,信息報文的最終傳輸點成為劃定運維報文數據參量最大限定條件的關鍵參照點。這得益于北斗通信技術的精準應用,工作人員能夠精確識別并標記無人機軌跡中每日的關鍵節點,進而將其設定為運維報文傳輸的終止位置。
1.3 通知協商報文
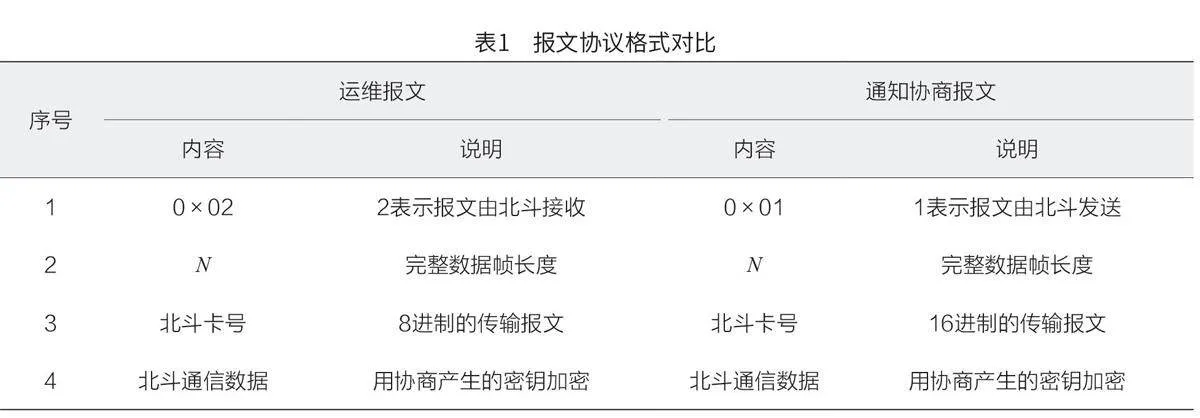
通知協商報文是明確闡述無人機控制系統與運動終端之間所采用的身份協商通信協議。經過對比與分析,相較于運維報文,通知協商報文在集成北斗通信能力方面展現出更為卓越的性能。通知協商報文利用加密技術處理飛行軌跡數據,恢復主機中控關鍵節點,并基于北斗通信節點,實時確定飛行路徑數據傳輸位置。表1 為報文協議格式對比。
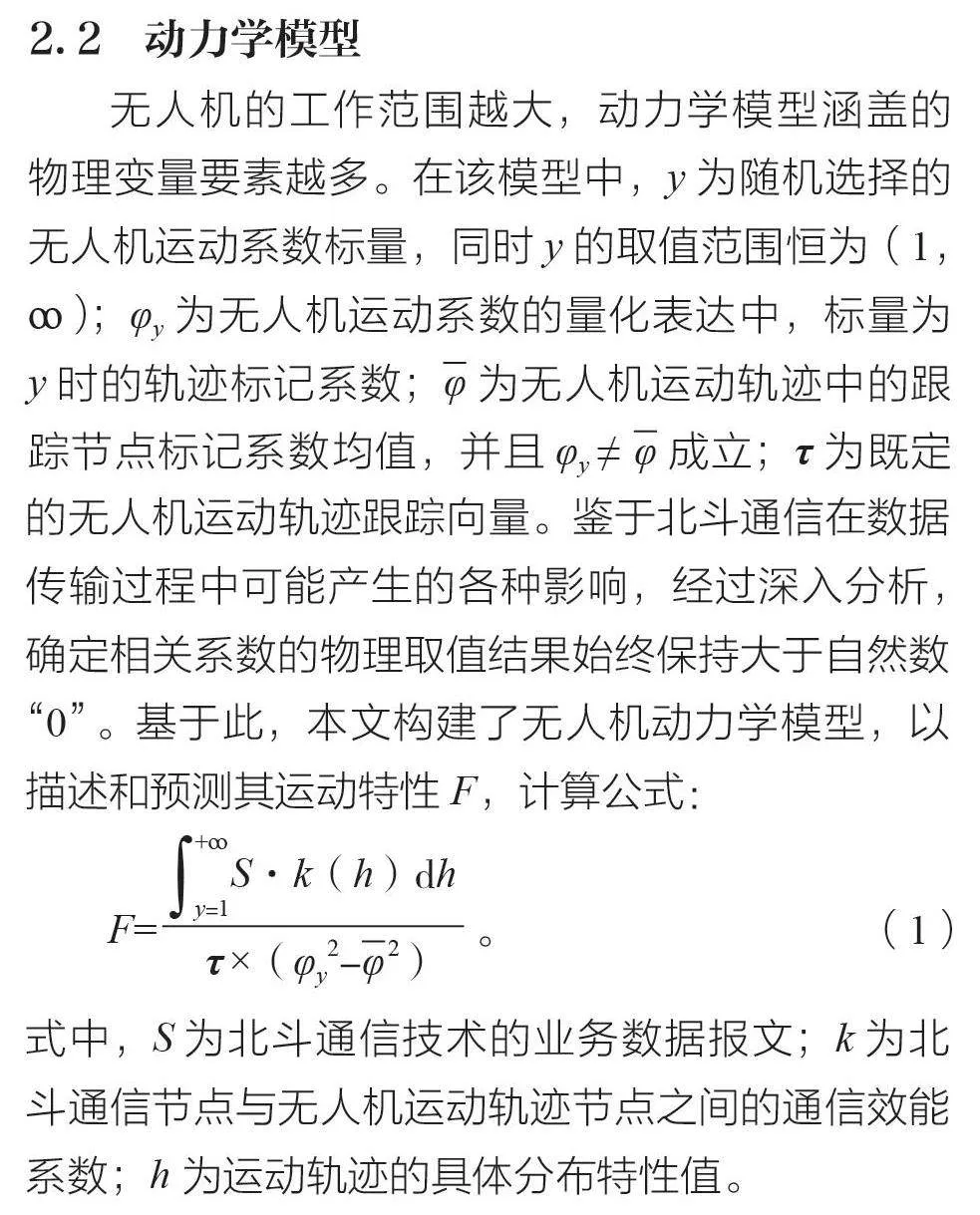
2 無人機運動軌跡跟蹤系統模型設計
2.1 無人機系統結構
本文設計的無人機系統結構中,電機為螺旋槳提供驅動力,確保其高速旋轉。電源被激活后,狀態指示燈持續亮燈,相機記錄無人機運動軌跡,并通過北斗通信將軌跡信息實時傳輸至控制系統。當電機供電效能減弱時,螺旋槳自動調節適配電池剩余能量。天線接收并識別北斗通信數據,并且傳遞至Micro 主機。槳葉保護罩負責保護螺旋槳且提供支撐。開源控制器用于確立無人機運動擴展模塊與控制系統的通信機制。北斗通信節點布局影響無人機系統結構間的連接與交互。
3 系統主控結構
無人機運動軌跡跟蹤控制系統架構如圖1 所示。
3.1 全驅運動結構
在無人機運動軌跡跟蹤系統中,動力信號控制器是關鍵。全驅運動結構可以根據節點模式實時調整軌跡并預測路徑,將數據文件安全傳送至控制中心,制定操作指令并監控飛行路徑[3]。采用LANC2與SGF65C 芯片負責實時調試,PG863J 芯片則主要負責調節系統控制主機與無人機運動軌跡節點之間的跟蹤匹配關系。RL611 與Pr4 ~ Pr7 設備確保穩定連接,動態確定節點狀態,保障安全飛行。
3.2 自適應控制器
自適應控制器以控制芯片為主要應用結構,其可以錄入無人機速度、軌跡節點坐標、通信數據參數等數據,對這些數據進行精確處理并生成可執行命令文件。關鍵數據參數將直接存儲于系統數據庫主機[4]。如圖2 所示,主供應電路負責生成信號并傳輸至控制芯片,經由變換器生成穩定電流通信信號。核心信號參數集成至控制芯片,創建了標準化輸出文件,實現了北斗通信主機穩定操作和功能恢復。關鍵參數需嚴格滿足北斗通信技術要求,確保無人機運動軌跡的精準跟蹤控制。
3.3 姿態調節器
姿態調節器已全面融入無人機運動軌跡監測系統的重要子模塊中。這些子模塊肩負精確記錄無人機運動行為的重任,并通過核心控制主機的深入分析,詳細考察飛行路徑上通信節點的布局。為確保通信的穩定性和可靠性,構建控制系統組件與控制主機之間的通信機制,必須嚴格遵循北斗通信技術的核心準則。此外,在無人機飛行軌跡監測系統中,姿態調節器結構的切換行為始終受到輸入電路核心部件精準、嚴密的監控與控制,以確保無人機飛行的穩定性和安全性。
無人機通信節點的早期存儲工作也需遵循相關規范,確保系統的穩定運行和數據準確性,使控制主機可以充分利用運動柜機。目前,該控制系統制定的運動軌跡跟蹤指令能夠較好地滿足實際應用的要求。
3.4 軌跡追蹤器
軌跡追蹤器負責記錄無人機運動,實現通信節點重排。基于北斗通信技術,系統主機能夠直接記錄追蹤器數據,確保軌跡節點數據準確[5]。通過調整軟硬件條件,實現無人機運動軌跡跟蹤控制系統的順利運行。
4 系統仿真分析
在無人機的飛行軌跡中,滾轉角、俯仰角和偏航角是3 個不同的觀測角度。如果通過控制主機獲得的3 個觀測角度的監測結果與無人機的實際軌跡一致,則能夠判定控制主機可以對無人機的運動軌跡進行準確的監測和控制;如果從任何一個觀測角度觀察到的結果與無人機的軌跡之間存在顯著差異,則判定控制主機無法準確跟蹤和控制無人機的整個行進軌跡。通過運用基于北斗通信技術的無人機運動軌跡追蹤控制系統,對中控主機實施干預,作為實驗組;采用基于自適應積分反步法的應用系統,對中控主機實施干預,作為對照組。
4.1 滾轉角跟蹤結果分析
滾轉角跟蹤結果的初始坐標設定為(0,554),在實驗過程中,實驗組無人機的運動軌跡與實際飛行軌跡保持了高度的一致性;對照組無人機的運動軌跡在橫縱坐標上顯示出持續的波動,其整體變化趨勢與實際飛行軌跡不符,且兩種軌跡之間存在顯著差異。
4.2 俯仰角跟蹤結果分析
俯仰角跟蹤從(0,0)開始。實驗組無人機運動軌跡與實際軌跡吻合,追蹤性能良好;對照組無人機運動軌跡波動顯著,與實際軌跡的差異較為明顯。
4.3 偏航角跟蹤結果分析
偏航角跟蹤結果的初始坐標設定為(0,263),在實驗過程中,實驗組無人機的運動軌跡與實際運動軌跡保持了良好的一致性;當橫坐標數值為100 ~ 300 時,對照組無人機的實際運動軌跡與預期軌跡相吻合,但是從整體視角來看,相較于實驗組,對照組與實際軌跡的吻合程度較差。
5 結論
綜上,本文研究了無人機運動軌跡控制系統的設計,針對無人機非線性、強耦合等特點,提出了一種基于北斗通信技術的無人機運動軌跡跟蹤控制方法,定義了協議文件連接形式,構建了無人機動力學模型。實驗結果表明,該控制系統運行良好,控制主機具有很強的實用性,支持通過主機組件對無人機的整條行進軌跡進行準確追蹤與控制。