基于灰狼優化PID控制的充電樁誤差計量系統設計
2024-10-09 00:00:00劉藝專
市場監管與質量技術研究 2024年4期

摘要:隨著現代社會的發展,傳統PID控制在數量龐大、非線性、強耦合、多參數等問題面前難以達到滿意的目標控制。通過PID控制器結合灰狼優化算法的方式,提出一種基于灰狼優化PID控制的充電樁誤差計量系統,設計系統框圖,通過模擬自然界中灰狼群體社會等級制度和社會行為進行分級,尋求PID控制算法參數的最優解,進一步提高充電樁計量誤差精度。
關鍵詞:充電樁;誤差計量;灰狼算法;PID控制
Design of a Charging Pile Error Measurement System Based on Gray Wolf Optimization PID Control
LIU Yizhuan
( Zhangzhou Metrology Institute, Zhangzhou 363000, Fujian, China )
Abstract: With the development of modern society, the traditional PID control is difficult to achieve the satisfactory objective control in the face of the problems of large number, non-linearity, strong coupling and multi-parameters. By using PID controller and gray wolf optimization algorithm, a charging pile error measurement system based on gray wolf optimization PID control is proposed, and the system block diagram is designed, by simulating the social hierarchy and social behavior of Gray Wolf Group in nature, the optimal solution of PID control algorithm parameters is sought to further improve the accuracy of charging pile measurement error.
Key Words: Charging pile; Error measurement; Gray wolf algorithm; PID control
0引言
隨著全球能源結構的轉型和環境保護意識的提升,新能源汽車逐漸成為汽車市場的重要力量[1]。作為支撐新能源汽車發展的關鍵基礎設施,充電樁的建設和完善直接關系到電動汽車的普及率和用戶的充電體驗。近年來,中國、美國以及歐洲等國家和地區紛紛出臺政策推動新能源汽車產業的發展,充電樁建設迎來爆發式增長。但充電樁的計量準確性問題逐漸顯現,它不僅影響著電動汽車用戶的經濟利益,也關系到能源管理效率和公平性[2]。
目前,充電樁計量通常采用脈沖法和累積電能法進行現場計量,選擇恒壓或者恒流充電模式,選取任意計量點位進行測試兩次,取平均誤差。在長時間運行和復雜的環境下可能會出現一定程度的誤差累積。此外,隨著充電需求的增加,充電樁的使用頻率顯著提高,這對計量系統的穩定性和準確性提出了更高要求。現有充電樁在計量過程中可能受到電流波動、電壓不穩定、設備老化等因素的影響,導致計量數據出現偏差。
為提高充電樁計量的準確性,需要對現有的計量系統進行改進。一方面,需要采用更為先進的測量技術和控制策略[3]。另一方面,需要建立動態的監測計量機制,確保充電樁在各種工作條件下均能提供準確的計量數據。此外,隨著智能化技術的發展,充電樁的計量系統也需要與智能電網、物聯網等技術相結合,實現在線計量。通過設計云平臺實現虛擬化的智能監測。PID控制可以根據實際的電流電壓輸入量,通過比例、積分、微分計算后控制標準器的電參數變化,從而實現誤差精準控制目的[4]。灰狼算法(GWO)作為一種新型啟發式算法,源于對灰狼群體追蹤、圍捕、攻擊獵物捕食行為的模擬[5]。GWO算法實現簡單且具有較強的尋優性能,廣泛運用于各個領域。因此,為彌補傳統PID控制的局限性,文中提出了一種基于灰狼優化PID控制的充電樁誤差計量系統設計,對充電樁計量進行評估,以提高充電樁計量的精度與穩定性[6]。
1系統總體設計及模型構建
該系統的設計目標是實現對充電樁計量過程的高精度監控,及時校正誤差,確保計量的準確性和可靠性。系統設計包括硬件架構和軟件算法兩個部分,其中硬件部分負責數據的采集和執行控制命令,軟件部分則負責數據處理和智能控制。
硬件架構由數據采集模塊、通信模塊、執行機構組成。其中,數據采集模塊負責收集充電樁在充電過程中的關鍵參數,包括電壓、電流、溫度等。通信模塊可將采集到的數據傳輸到控制中心,同時接收控制中心的指令。執行機構根據控制中心的指令,執行相應的動作。軟件算法包括數據預處理、灰狼優化算法、PID控制算法、誤差補償校正算法[7]。
1.1系統總體結構框圖
文中設計的充電樁誤差計量系統主要由上述硬件與軟件組成,如圖1所示。
圖1 系統總體設計框圖
1.2工作原理
充電樁作業時,采集系統動態充電樁運行時的相關參數。將控制器用作該系統中的二次控制器來執行負載頻率控制,在不可預見的負載條件下,系統的相關電參數可能會偏離正常值。通過模擬灰狼群體社會的制度等方式不斷迭代尋找最優解的方式獲取增益參數優化PID控制器,達到控制和穩定振蕩的目的。
1.3計量系統模型
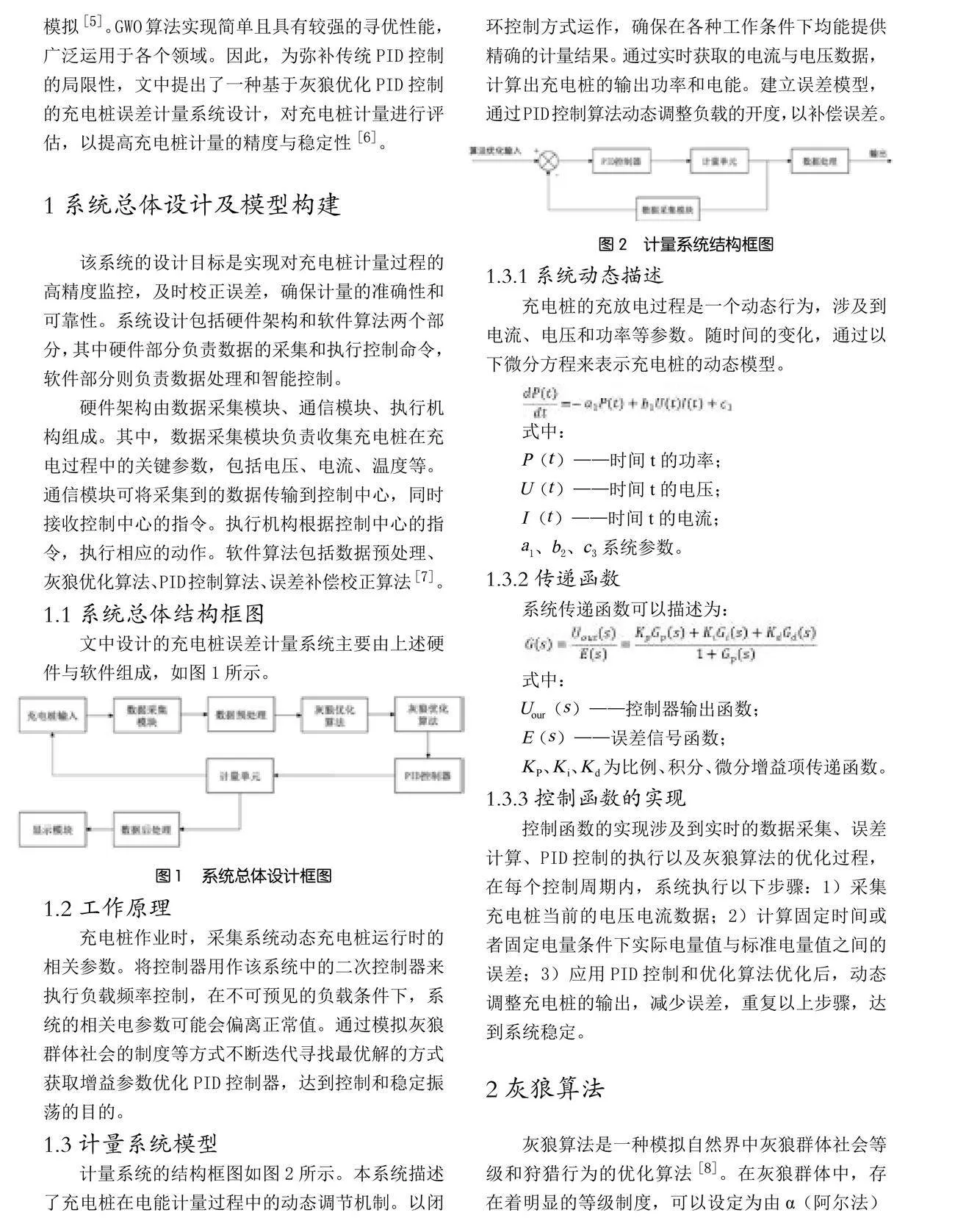
計量系統的結構框圖如圖2所示。本系統描述了充電樁在電能計量過程中的動態調節機制。以閉環控制方式運作,確保在各種工作條件下均能提供精確的計量結果。通過實時獲取的電流與電壓數據,計算出充電樁的輸出功率和電能。建立誤差模型,通過PID控制算法動態調整負載的開度,以補償誤差。
圖2 計量系統結構框圖
1.3.1系統動態描述
充電樁的充放電過程是一個動態行為,涉及到電流、電壓和功率等參數。隨時間的變化,通過以下微分方程來表示充電樁的動態模型。
式中:
()——時間t的功率;
()——時間t的電壓;
()——時間t的電流;
1、2、3系統參數。
1.3.2傳遞函數
系統傳遞函數可以描述為:
式中:
our()——控制器輸出函數;
()——誤差信號函數;
P、i、d為比例、積分、微分增益項傳遞函數。
1.3.3控制函數的實現
控制函數的實現涉及到實時的數據采集、誤差計算、PID控制的執行以及灰狼算法的優化過程,在每個控制周期內,系統執行以下步驟:1)采集充電樁當前的電壓電流數據;2)計算固定時間或者固定電量條件下VYkHRErkcZi5uLW9q1bxWA==實際電量值與標準電量值之間的誤差;3)應用PID控制和優化算法優化后,動態調整充電樁的輸出,減少誤差,重復以上步驟,達到系統穩定。
2灰狼算法
灰狼算法是一種模擬自然界中灰狼群體社會等級和狩獵行為的優化算法[8]。在灰狼群體中,存在著明顯的等級制度,可以設定為由α(阿爾法)狼領導,其次為β(貝塔)狼和γ(伽馬)狼,其余的為普通狼群成員δ。在狩獵過程中,狼群通過包圍、逼近和攻擊獵物的策略來捕食。灰狼算法就是將這一自然行為抽象為數學模型,用于解決優化問題。算法開始時隨機初始化一群狼代表解的集合,通過迭代過程模擬狼群的捕食行為,直到捕捉獵物,即尋找到問題的最優解。
步長和距離的計算:
(1)
(2)
(3)
(4)
式中:代表灰狼在經過第次選代后計算出的獵物當前所在位置向量;代表灰狼個體經過次迭代后所處的位置向量,即算法的局部最優解位置;代表灰狼個體最終位置,即算法最終解,A和C為包圍獵物過程中所產生的隨機系數。a為距離控制參數,一般a的值在[0,2]之間且隨著算法的迭代次數增加而遞減,1,2為[0,1]之間的隨機數[9]。
在狼群逼近獵物的過程中,為更好地描述獵物的最優位置,利用式(1)來更科學地模擬狼α、β和γ的潛在位置以保存前三個最佳方案,并讓其他狼根據新的策略來替代現有的位置,計算表達式如下:
(5)
(6)
(7)
式中:、和分別表示狼α、β和γ與其他灰狼個體之間的距離;、和分別代表第次選代后狼α、β和γ當前位置;代表當前灰狼個體位置。
那么,可通過(2)式計算出狼α、β和γ的位置進而得到灰狼個體最終位置:
(8)
(9)
(10)
(11)
式中:、、分別表示狼α、β和γ的步長和方向。
3灰狼優化PID控制
PID控制是先將輸入量經過比例積分微分運算后,再輸出控制量作用于執行機構,原理簡單且實用,廣泛應用于各類工程之中。將灰狼算法與PID控制器進行結合,具有自適應調整的能力,使得系統控制能夠陷入局部最優的困境,并且提高系統控制的性能,減少超調量,加快響應速度。優化后的PID控制系統對于模型不確定性和外部擾動具有更好的魯棒性[10]。灰狼優化PID控制(GWO-PID)算法流程圖如圖3所示。
圖3 灰狼優化PID控制(GWO-PID)算法流程圖
適應度函數通常是為了最小化系統誤差,在考慮系統的響應速度和穩定性的情況下,盡可能輸出滿意的數值。在設定完成系統狼群大小、最大迭代次數、PID系統控制增益閥值后,將單位階躍信號作為系統輸入,最終得到系統的響應曲線。通過仿真實驗模擬充電樁充電過程中的誤差數據,再將設計的控制系統搭載至充電樁樣機上進行測試驗證仿真結果。
4結論
新能源充電樁目前建設體量大且在近年被列入國家強制檢定計量器具,其計量準確性是群眾關心、社會關注的重點方向。傳統PID控制雖然有著控制便捷的優點,但是在精密測量測試以及復雜多變的應用場景時,存在局限性。文中提出一種基于灰狼優化PID控制的充電樁計量誤差優化方法,旨在提高充電樁計量的準確性。通過灰狼算法優化后的充電樁計量可以有效調節電參數的波動,減少因系統響應慢、系統穩定性差而導致的誤差累積,進而通過調節負載,調整電壓電流值,減少誤差。
參考文獻
[1]張洪寶,彭潞,許鵬飛,等.電動汽車充電樁計量檢定
的研究[J].計量與測試技術,2019,46(03):29-31.
[2]劉建,徐晴,孫應軍,等.用于電動汽車直流充電
樁的能效計量方案研究[J]. 電測與儀表,2017,54(23):
47-53.
[3]朱江淼,張森.電動汽車充電站實時網絡電能計量系
統的研制[J].國外電子測量技術,2015,34(12):53-56.
[4]馬志強.電動汽車直流充電計量研究及計量模塊設計[D].
重慶大學,2017.
[5]張曉鳳,王秀英.灰狼優化算法研究綜述[J].計算機
科學,2019,46(03):30-38.
[6]馮嚴冰.基于灰狼優化算法的PID控制器設計[J].
傳感器世界,2022,28(08):17-21.
[7]王新東,徐艷蕾,張奇,等.基于灰狼優化PID控制
的變量噴藥系統研究[J].農機化研究,2020,42(05):
114-119.
[8]李師.基于改進灰狼算法的溫室溫濕度預測與控制[D].
河北農業大學,2021.
[9]陳平,周娟,吳名功.基于改進GWO-GM(1,1)模型的
直流充電樁在線計量誤差預測方法研究[J].現代電
子技術,2024,47(05):112-117.
[10]胡澤洲,于仲安,張軍令.改進的灰狼算法在電動
汽車充電調度中的應用[J].科學技術與工程,2022,
22(30):13355-13362.
