風電場風機葉片無人機自主巡檢系統(tǒng)分析設計與研究
2024-10-12 00:00:00李哲
機電信息 2024年19期



摘要:結(jié)合風電場巡檢風機葉片外觀巡檢現(xiàn)狀,對風機葉片無人機自主巡檢系統(tǒng)進行了研究。首先對無人機自主巡檢系統(tǒng)所需要實現(xiàn)的核心功能進行了闡述,接著分析和設計了自主巡檢系統(tǒng)的硬件設備組成和軟件功能模塊,并從風機停機姿態(tài)參數(shù)測算、自主巡檢路徑規(guī)劃和視覺伺服云臺追蹤等方面對實現(xiàn)無人機自主巡檢目標所需的關(guān)鍵技術(shù)進行了研究,最后對無人機采集葉片圖像的檢測內(nèi)容和實際應用進行了闡述。該系統(tǒng)對于實現(xiàn)風電場風機葉片的自主化和智能化巡檢具有重要的意義。
關(guān)鍵詞:無人機;風電場;自動巡檢;風力發(fā)電機
中圖分類號:TM315;TP391 文獻標志碼:A 文章編號:1671-0797(2024)19-0007-06
DOI:10.19514/j.cnki.cn32-1628/tm.2024.19.002
基金資助:中國長江三峽集團有限公司科研項目“無人機風電場自主巡檢導航方案設計及應用示范”資助(WWKY-2021-0023)
0 引言
目前,風電機組外觀巡檢主要以高倍望遠鏡觀察或“蜘蛛人”高空繞行下降的方式目測檢查。但以上人工巡檢方式耗費人力嚴重,效率低下,且工作質(zhì)量受人體疲勞、參差不齊的人員素質(zhì)等因素影響較大,“蜘蛛人”的方式還存在人身guVG7IO+OJutfck4tslDqw==安全風險高的問題,同時這種人工作業(yè)的模式缺乏對巡檢數(shù)據(jù)的規(guī)范化管理。尤其是海上風電,受風浪環(huán)境、離岸距離、交通工具等因素影響,人員出海進行日常巡檢存在難度大、風險高、效率低下等一系列問題。同時,相較于陸上風電,海上風電機組運行環(huán)境惡劣,風機缺陷風險更高。為此,相較于陸地風電場,海上風電場的日常維護及巡檢難度更大。
為了解決高空巡檢作業(yè)的問題,近年來多旋翼無人機逐漸被引入風電機組外觀巡檢工作中。但是由于風機巡檢內(nèi)容的復雜性,目前多旋翼無人機風機巡檢的模式主要為人員在風機機位下手動操控無人機巡檢,少數(shù)廠家可以通過預先設置固定風機停機位的方式實現(xiàn)半自動飛行巡檢。但是以上模式依舊需要人員到達每臺風機的機位下方,存在效率低下、自動化程度較低的問題,尤其是海上風電開船出海到達每臺機位的效率非常低下;并且手動飛行還存在人員操作不穩(wěn)定、不規(guī)范等問題,對后續(xù)數(shù)據(jù)集約化處理不利。
因此,面向風電場尤其是海上風電場提高風機外觀巡檢自動化水平、減少人工巡檢作業(yè)頻次、提高巡檢作業(yè)效率的需求,為適應風電場運維工作智能化的發(fā)展趨勢[1-7],本文研究設計以大疆多旋翼無人機為核心檢測設備的風機葉片自主巡檢系統(tǒng),以實現(xiàn)無人機對風電機組葉片外觀巡檢的自動化功能。
1 主要功能
無人機自主巡檢的全過程實施方案可以劃分為以下幾個主要步驟:①目標風機停機→②一鍵啟動巡檢任務,無人機起飛→③無人機抵近,獲取風機停機狀態(tài)關(guān)鍵參數(shù)→④計算巡檢關(guān)鍵點,自動規(guī)劃巡檢飛行路徑→⑤沿葉片定距飛行→⑥高分辨率攝像頭進行連續(xù)拍照→⑦巡檢任務結(jié)束,開始返航→⑧高精度降落到啟航點。
對應以上實施步驟,無人機自主巡檢系統(tǒng)需要實現(xiàn)的主要功能劃分如下。
1.1 巡檢前準備和巡檢任務啟動
將風電場的風機進行編號,和該風機的葉片長度、輪轂高度、輪轂半徑、塔筒基座GPS坐標等已知固定參數(shù)關(guān)聯(lián),形成風機數(shù)據(jù)表。巡檢任務啟動時,操作人員可在人機交互界面上輸入待檢風機編號,操作無人機系統(tǒng)啟動自主巡檢任務。
1.2 停機狀態(tài)參數(shù)獲取
風力發(fā)電機組主要停機狀態(tài)數(shù)據(jù)是風機風輪的偏航角、葉片的傾角等隨機停機參數(shù),停機姿態(tài)的確定為后續(xù)自主路徑規(guī)劃提供了基礎(chǔ)。
1.3 巡檢路徑點規(guī)劃
根據(jù)風機停機狀態(tài)參數(shù),結(jié)合飛行安全距離等配置參數(shù),風機葉片長度、輪轂高度、輪轂半徑等已知固定參數(shù),計算完成巡檢任務的關(guān)鍵路徑點,按照關(guān)鍵路徑點依次飛行,形成飛行路徑。
1.4 定距飛行功能
無人機在對風機進行外觀巡檢時保持恒定距離,以保證攝像有效性。
1.5 云臺追蹤調(diào)整及自動連拍
巡檢葉片過程中,云臺實時調(diào)整攝像頭位置,將風機葉片始終保持在視野中心位置,并連續(xù)拍攝照片。
1.6 高精度降落
無人機能夠安全返航,高精度降落至指定降落回收位置。
2 自主巡檢系統(tǒng)軟硬件
2.1 系統(tǒng)硬件構(gòu)成
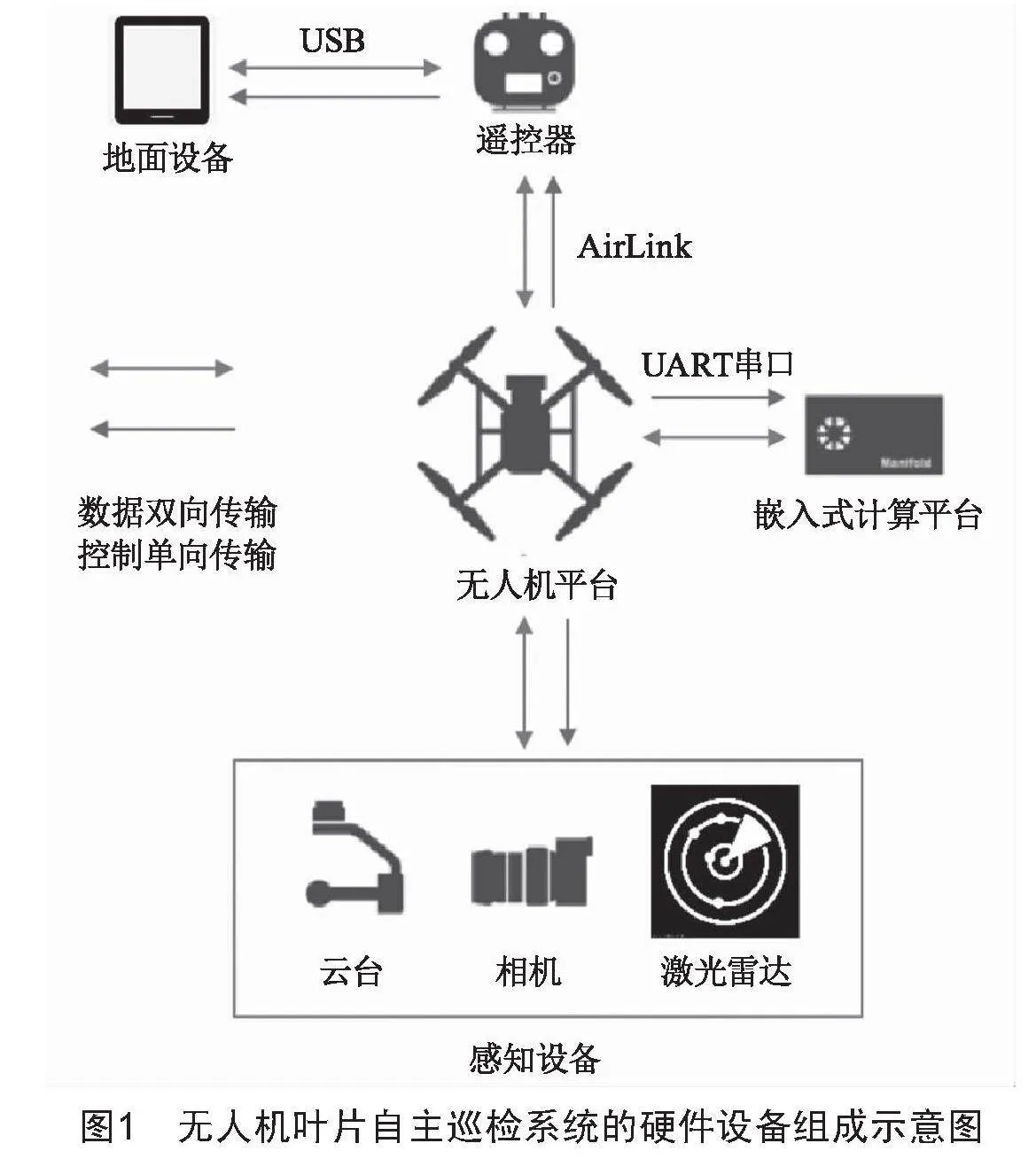
圖1所示是無人機葉片自主巡檢系統(tǒng)的硬件設備組成示意圖,包含無人機平臺、地面設備、遙控器、嵌入式計算平臺和傳感器等。
無人機平臺(圖2):無人機應具有可靠的飛行控制技術(shù),能夠廣泛兼容第三方開發(fā)平臺。搭載開發(fā)者所使用的負載設備和計算平臺,并向開發(fā)者開放應用接口,保證使用者能夠根據(jù)實際應用需求自行開發(fā)所需的應用程序。本文選用大疆M300 RTK型號作為無人機平臺,該無人機最長續(xù)航時間可達55 min,可抗7級風力,同時具有六向定位避障與15 km遠距離圖傳功能,保障了葉片自主飛行巡檢的要求。
地面設備:地面設備用于運行開發(fā)者的上位機程序。上位機程序采用交互式模式,以便巡檢人員輸入待檢風機編號,自定義的風機安全飛行距離參數(shù)、飛行速度等數(shù)據(jù),并含任務執(zhí)行啟動和重要傳感器數(shù)據(jù)實時顯示。為了便于巡檢人員攜帶,可選用Android或IoS平板電腦,上位機程序由Java等程序設計語言編寫。
遙控器:無人機與地面設備之間的數(shù)據(jù)鏈路包括控制鏈路、數(shù)傳鏈路和圖傳鏈路等,地面設備首先通過有線(USB)或無線(Wi-Fi)連接傳遞到大疆無人機的遙控器上,并最終通過Wi-Fi、LightBridge、OcuSync等鏈路傳遞到無人機上,因此需要以遙控器作為媒介來進行通信和數(shù)據(jù)傳輸。
嵌入式計算平臺:嵌入式計算平臺用于運行下位機程序,包含核心應用算法功能模塊,應與無人機適配并兼具較高的性能,具備圖像處理程序的良好運行效果。本文選用Manifold 2C/2G機載計算機。
感知設備:無人機平臺上需掛載高清相機或激光雷達等感知設備,用以滿足復雜多樣的圖像處理和分析任務,而云臺能夠?qū)崿F(xiàn)搭載相機俯仰角和偏航角的實時變化和調(diào)整,通過拍攝角度的調(diào)整從而達到所拍攝圖片具有良好效果的功能。本文選用的H20T攝像頭包含2 000萬像素變焦相機、1 200萬像素廣角相機、1 200 m激光測距儀與熱成像相機,具備強大的功能,如圖3所示。
2.2 系統(tǒng)軟件組成
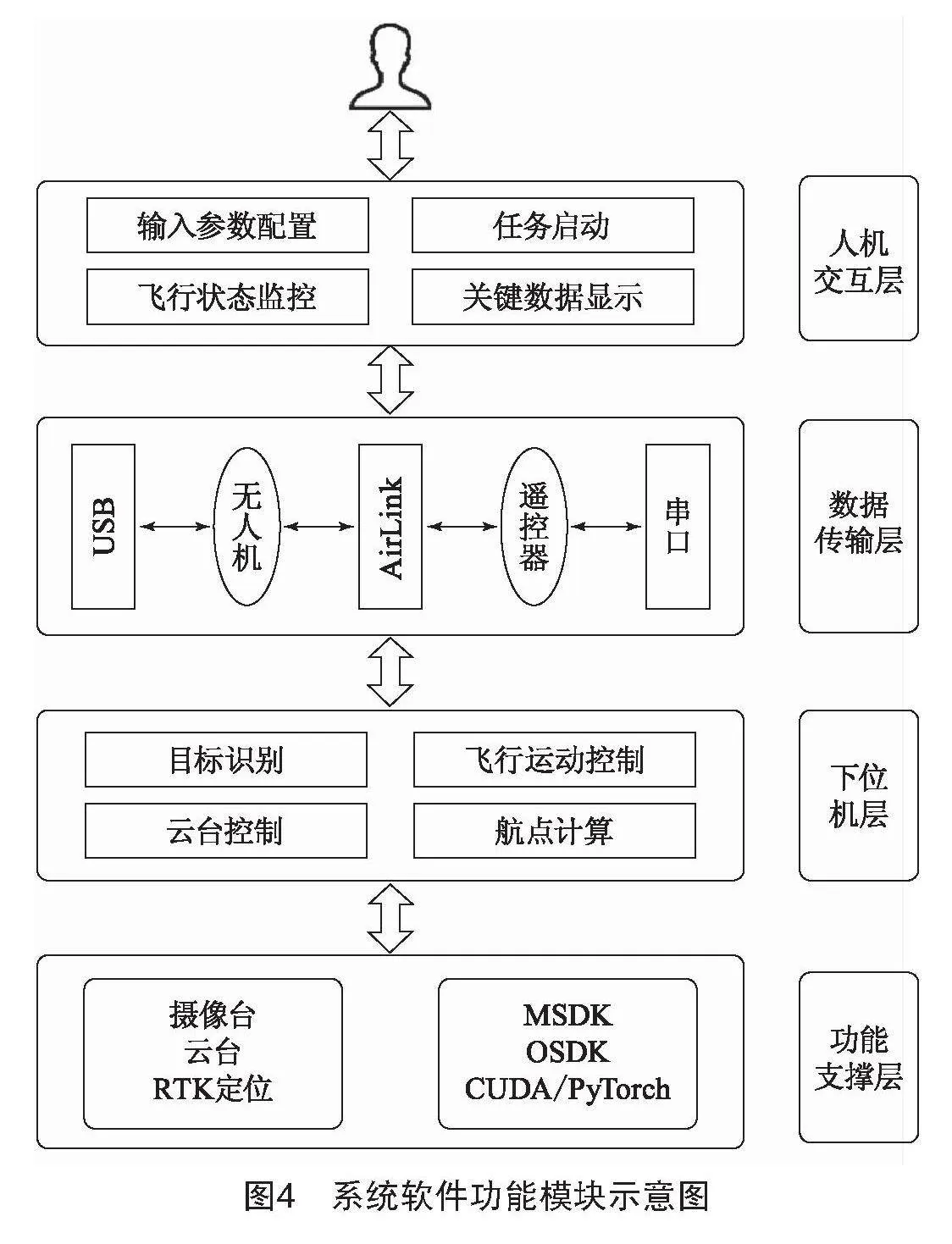
系統(tǒng)軟件包含應用算法和控制程序,是風機葉片自主巡檢系統(tǒng)的基礎(chǔ)部分,可分為人機交互層、數(shù)據(jù)傳輸層、下位機層和功能支撐層,其中人機交互層和下位機層分別運行著上位機系統(tǒng)程序和下位機系統(tǒng)程序,是軟件系統(tǒng)的核心。
上位機程序運行在地面設備上并與遙控器連接,本質(zhì)上為一個人機交互式程序。該上位機系統(tǒng)保留參數(shù)輸入位置,在巡檢前可輸入待巡檢風機的編號和巡檢時離風機的安全距離、巡檢飛行速度等自定義參數(shù),上位機程序可以實現(xiàn)一鍵點擊啟動,可以在無人機巡檢飛行時進行狀態(tài)監(jiān)控,包含相機實時拍攝畫面展示、坐標位置與飛行速度展示、剩余電量和百分號表示的巡檢完成程度顯示等功能。本文的上位機系統(tǒng)基于大疆MSDK開發(fā)套件進行開發(fā),是實現(xiàn)在移動端手持設備上操控無人機的重要組成部分。
下位機程序運行在嵌入式計算平臺上,包含為實現(xiàn)無人機自主巡檢任務而設計的各種核心應用算法與控制程序。在計算平臺上,巡檢任務開啟后,這些應用算法與控制程序可以實現(xiàn):粗定位到待巡檢風機塔柱上方附近位置處停留;控制攝像機與云臺,實現(xiàn)視頻流的拍攝與高分辨率圖像的獲取;檢測風機葉片和輪轂等目標,實現(xiàn)無人機風機偏航角、輪轂位置與風機葉片傾角等重要參數(shù)的求解;自動生成巡檢路徑的關(guān)鍵點,由航點任務規(guī)劃最終實現(xiàn)無人機自主飛行功能。本文的下位機系統(tǒng)基于大疆OSDK開發(fā)套件進行開發(fā),可通過調(diào)用指定的接口來獲取無人機上的各類數(shù)據(jù),執(zhí)行相應的計算和處理,生成對應的控制指令控制無人機執(zhí)行相應的動作。
系統(tǒng)軟件功能模塊示意圖如圖4所示。
3 自主巡檢關(guān)鍵技術(shù)
對于無人機風機葉片全自主巡檢而言,核心技術(shù)包含對于風機以任意姿態(tài)停機后相關(guān)參數(shù)的測算,結(jié)合已知和測算參數(shù)的巡檢路徑的自動規(guī)劃和攝像頭將風機葉片盡量保持在視野中央位置的云臺自動追蹤。
3.1 風機停機姿態(tài)參數(shù)測算
當風機以任意狀態(tài)停機時,風輪偏航角α和風機葉片傾角θ參數(shù)是隨機的,需要無人機上搭載的感知設備進行姿態(tài)參數(shù)的測算。
從感知設備處理圖像的維度,可以分為2D圖像數(shù)據(jù)與3D點云數(shù)據(jù)。
3.1.1 2D圖像數(shù)據(jù)設備
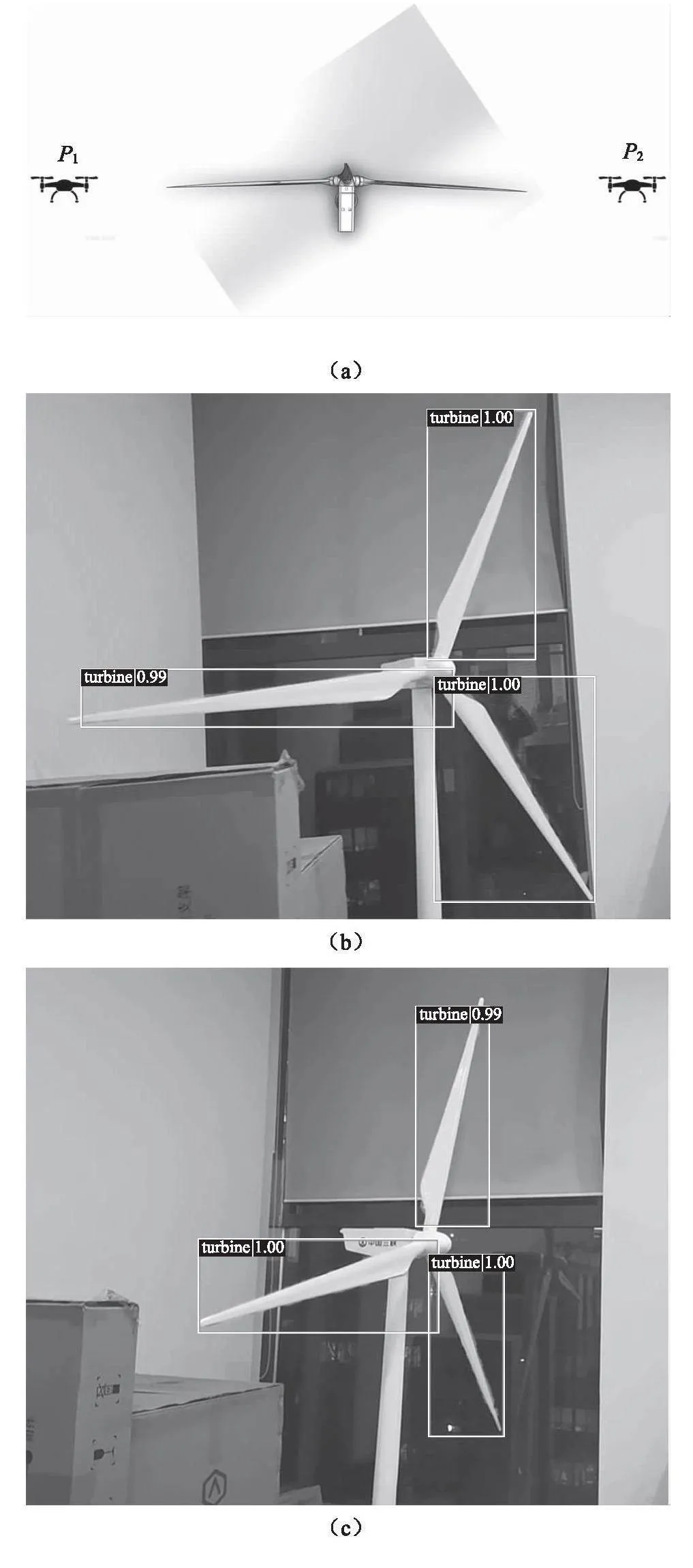
風機是由三扇兩兩互成120°角的葉片組成,具有特殊的外觀結(jié)構(gòu),三扇葉片基本在同一平面上。對于2D平面圖像,可選取風機葉片作為目標特征,并采用深度學習圖像識別算法識別出葉片(與導流罩),繪制葉片矩形識別框,計算其位置和大小。在與輪轂等高的位置上,環(huán)繞風機飛行一周,攝像頭實時采集風機外觀視頻流并檢測風機葉片,計算葉片矩形識別框的橫縱比(即矩形邊界框的寬度與高度比),將檢測出的矩形框橫縱比中的最小值作為此位置的矩形框度量值,在環(huán)繞飛行的過程中,找到矩形框度量值最小的兩個位置P1和P2,如圖5所示。
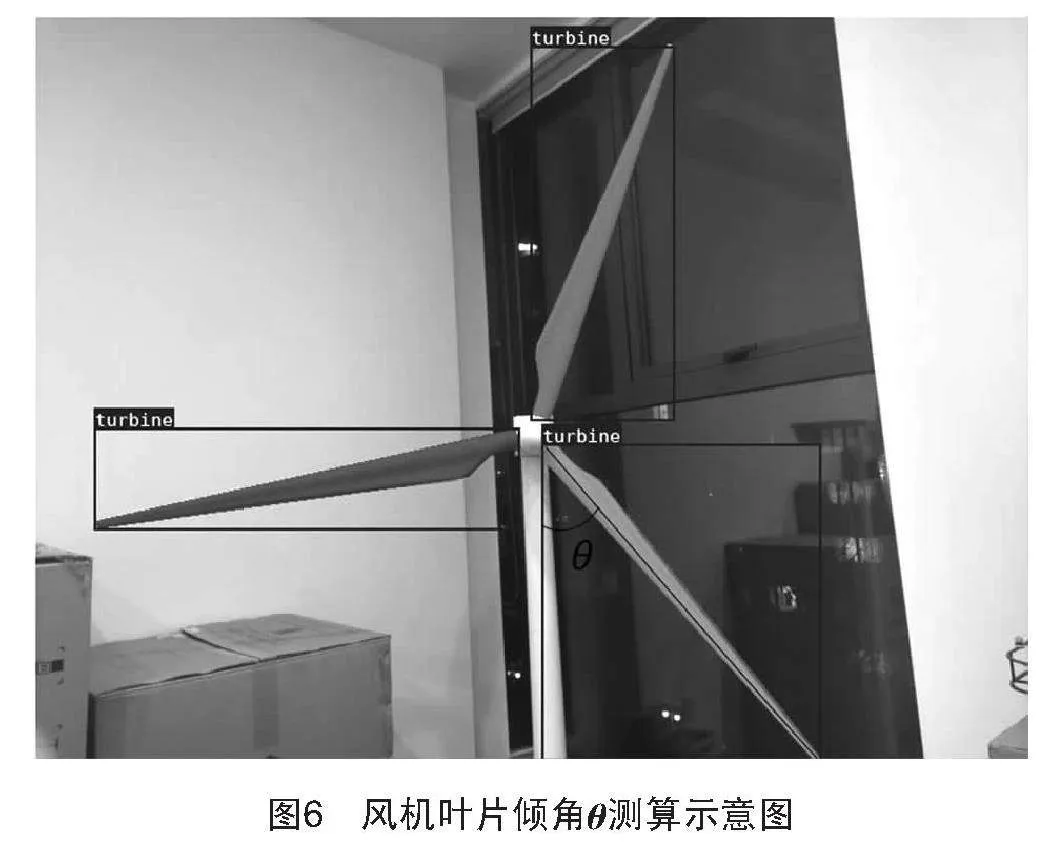
再結(jié)合塔柱GPS坐標和P1、P2位置的坐標,即可計算風輪平面所在位置,再根據(jù)環(huán)繞飛行過程中識別出導流罩的無人機相對位置,計算出風輪平面的朝向。最終,無人機結(jié)合輪轂高度和測算的風輪偏航角α,自行飛行至風輪平面正前方,根據(jù)逆時針方向下距離豎直塔柱最近的葉片矩形識別框的對角線與豎直方向的夾角,估算出風機葉片傾角θ,如圖6所示。
3.1.2 3D點云數(shù)據(jù)設備
對于3D點云數(shù)據(jù),當使用激光雷達、毫米波雷達等硬件設備或SFM與MVS等三維成像算法獲取風機外觀3D點云數(shù)據(jù)后,首先采用點云濾波去除風機點云的噪點和無關(guān)點云數(shù)據(jù),再使用點云模型分割等方法得到風電機組各部分模型,最后利用葉片點云的點云投影、空間擬合和骨架提取等算法計算獲取風輪偏航角α和風機葉片傾角θ。
3.2 自主巡檢路徑規(guī)劃
自主巡檢路徑規(guī)劃技術(shù)需要計算巡檢路徑上關(guān)鍵點在GPS模塊下的經(jīng)緯高坐標(LLA)數(shù)據(jù),使無人機依次飛行到這些關(guān)鍵點的位置上,從而形成對風機三扇葉片前緣、后緣和迎風面、背風面的表面巡檢。
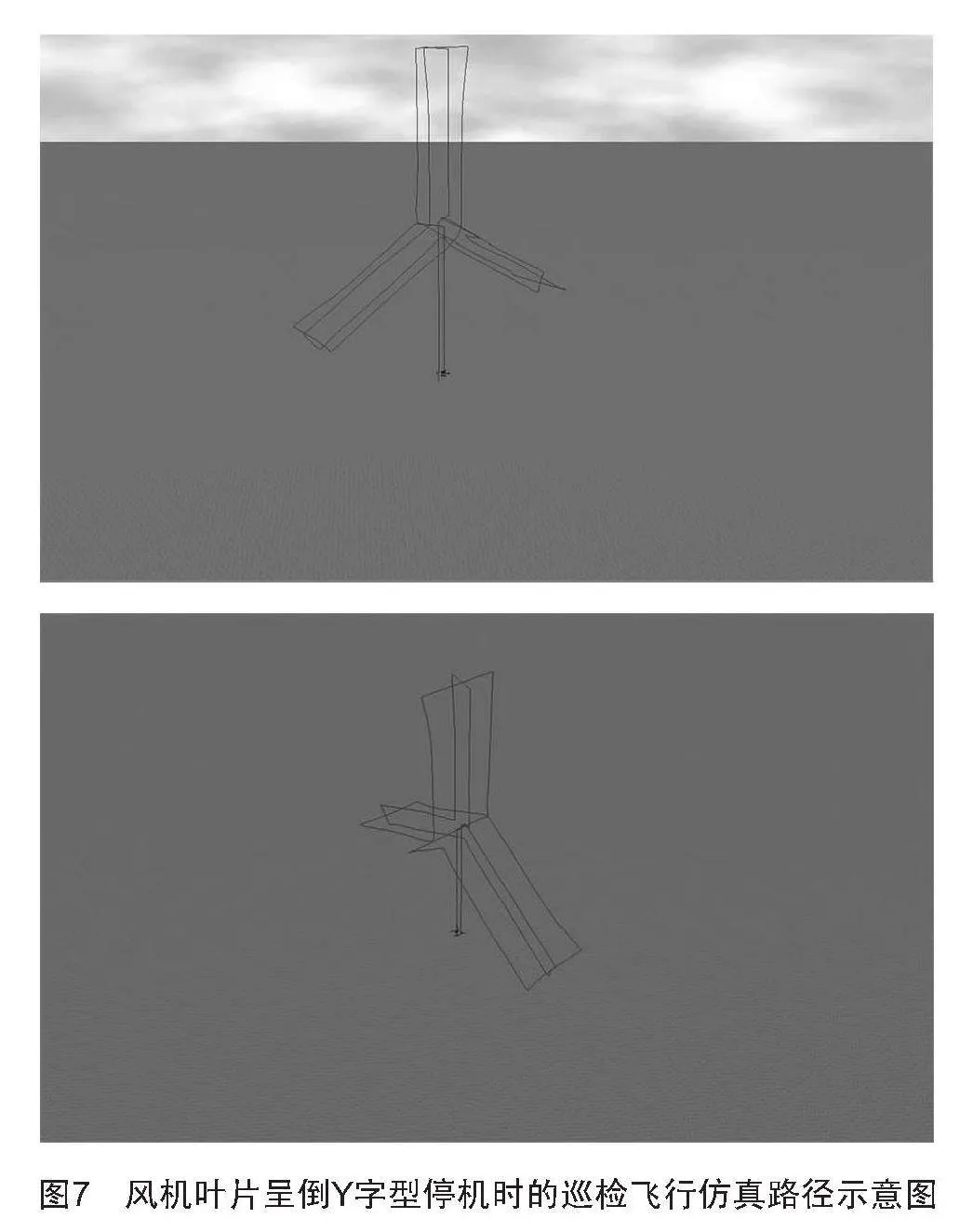
技術(shù)功能實現(xiàn)方面,首先是建立坐標系計算關(guān)鍵位置,分別以風機塔柱地面中心為原點建立起東北天坐標系(ENU)R1,以三扇葉片中心線的交匯點(在輪轂內(nèi)部)為原點,建立輪轂坐標系R2。在輪轂坐標系R2上,結(jié)合輪轂半徑r、葉片長度L、距離葉片的安全飛行距離w和測算的葉片傾角參數(shù)θ,計算出輪轂坐標系R2下各個關(guān)鍵點的空間坐標。之后結(jié)合輪轂高度h、風輪偏航角α和塔柱與葉片中心線交匯點之間的平移距離s參數(shù),生成東北天坐標系R1和輪轂坐標系R2之間的旋轉(zhuǎn)變換矩陣,將輪轂坐標系R2下的關(guān)鍵點坐標換算到東北天坐標系R1下。最后再將東北天坐標系R1下的關(guān)鍵點空間數(shù)據(jù)根據(jù)坐標系換算公式計算生成經(jīng)緯高坐標,輸入給無人機的飛行模塊,并根據(jù)飛行的位置調(diào)整變換無人機機頭朝向和云臺角度,保證相機始終正對葉片,拍攝出清晰的風機表面外觀圖像或視頻數(shù)據(jù)。圖7所示為當風機葉片呈倒Y字型停機時的巡檢飛行仿真路徑。
3.3 視覺伺服云臺追蹤
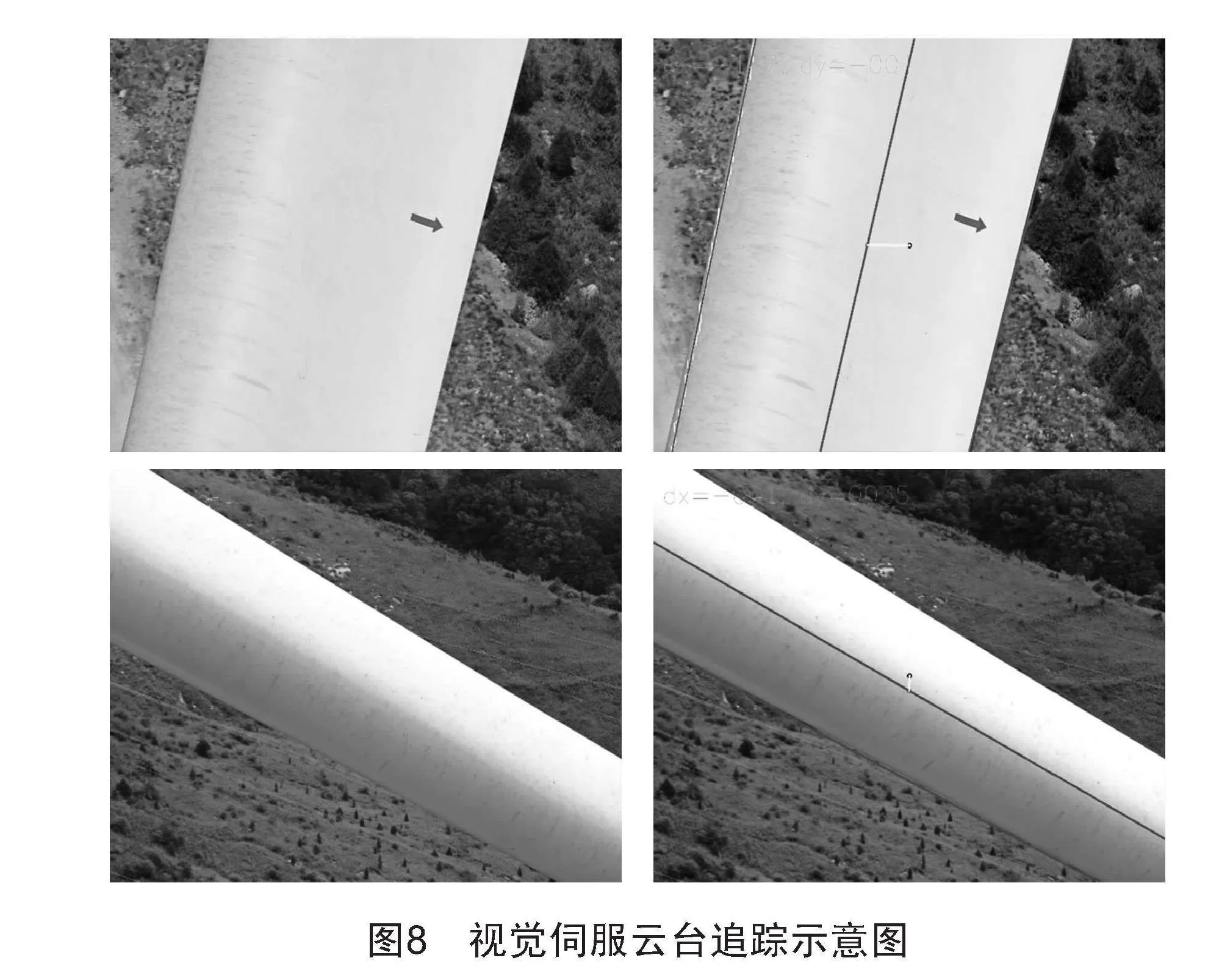
在沿著風機預設路徑點飛行時,可能會由若干因素的影響而導致相機在飛行到葉尖的過程中稍稍偏離葉片,所以在拍攝時,需要盡量保持風機葉片位于相機視野中央。本文采用先對視頻流圖像幀中的葉片進行分割,再對分割出的葉片區(qū)域進行邊緣檢測和直線擬合的方法,提取出最后的中軸線。根據(jù)中軸線的圖像位置,云臺控制相機,使拍攝的葉片圖像盡量位于相機視野中央,方便后續(xù)的葉片圖像拼接等工作。可采用基于HSV顏色模型的傳統(tǒng)圖像處理方法:HSV顏色模型是一種直觀的顏色模型,符合人眼的視覺感知特性,另一方面亮度分量與圖像的色彩信息無關(guān),對于光照的抗干擾能力強。針對含有特定顏色信息的目標圖像分割,顏色特征是區(qū)分前景和背景的一個重要特征信息。
對于初始目標幀選取兩個特征定位點,框選出一個矩形區(qū)域來提取顏色特征,求取該區(qū)域的HSV通道閾值范圍;顏色特征提取到的特征值構(gòu)成了對目標區(qū)域分割的先驗信息,通過該信息進行圖像分割;形態(tài)學處理得到連通區(qū)域,并選取其中的最大連通域作為檢測到的葉片區(qū)域來提取其邊界;根據(jù)邊緣信息計算左邊緣直線和右邊緣直線,并計算提取中軸線的位置;根據(jù)中軸線中點與圖像中間點之間的偏移來調(diào)整云臺姿態(tài),效果如圖8所示。
4 檢測內(nèi)容與應用
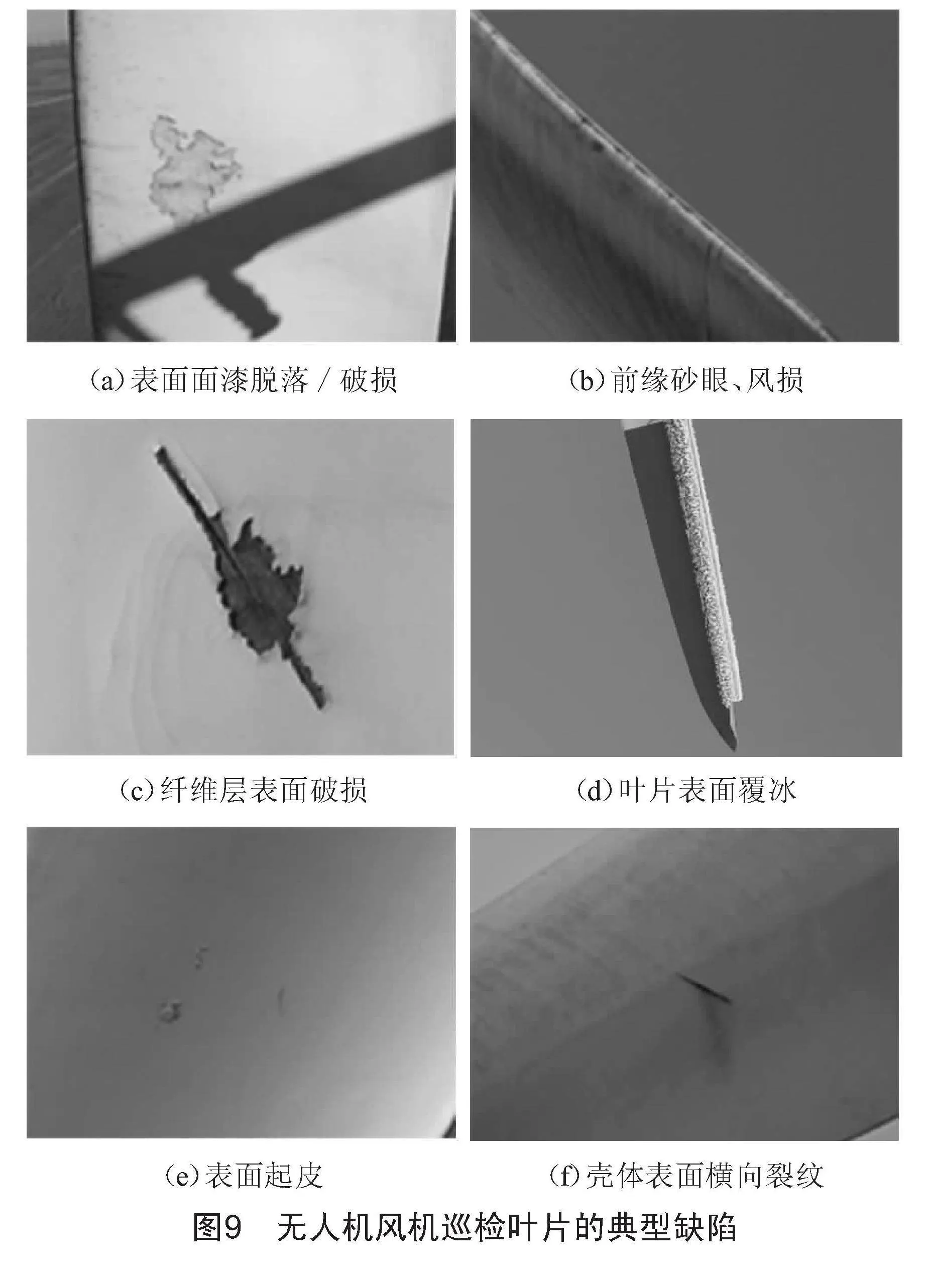
基于本文所研究的無人機風機葉片自主巡檢技術(shù),無人機能夠自動對風電場中風機葉片的前緣、后緣、迎風面和背風面等外觀關(guān)鍵部位進行巡檢,通過在關(guān)鍵路徑點位置拍攝高清相片或視頻,獲取海量的外觀巡檢數(shù)據(jù)。搭建智能識別系統(tǒng)和采用基于深度學習的缺陷檢測算法,對這些外觀數(shù)據(jù)進行學習和訓練,能夠自主識別出風機葉片外觀缺陷的種類和面積。通過后續(xù)巡檢數(shù)據(jù)的收集和積累,缺陷檢測模型也能夠不斷更新和完善。智能識別系統(tǒng)根據(jù)無人機傳輸?shù)膱D像,利用AI云計算、圖像處理技術(shù),實時識別缺陷,自動診斷設備故障。同時結(jié)合攝影測量技術(shù),對故障部位進行定位,自動完成初步診斷工作,協(xié)助檢修人員快速識別和分析問題,并提供實時預警。圖9所示為無人機風機巡檢葉片的幾種典型缺陷。
5 結(jié)束語
本文對風機葉片無人機自主巡檢系統(tǒng)的軟硬件平臺和關(guān)鍵技術(shù)核心算法實現(xiàn)等進行了研究設計和分析,通過使用無人機相關(guān)技術(shù)對風機葉片進行自主化智能巡檢,不僅有效降低了人力成本,簡化了巡檢流程,極大地提高了風機葉片的巡檢效率,而且還促進了風機運維巡檢工作由傳統(tǒng)方式向數(shù)字化、自動化、智能化轉(zhuǎn)型,對于新能源風電場場站風機葉片的巡檢工作開展具有較強的現(xiàn)實意義。
[參考文獻]
[1] 馬敏敏,劉昊,高毓欣,等.基于無人機與人工智能的風機葉片全自主巡檢[J].電氣時代,2023(增刊2):44-48.
[2] 卜勇濤,焦巖,王凝哲,等.基于無人機的風電智能巡檢系統(tǒng)分析[J].電子技術(shù),2023,52(7):370-371.
[3] 魏昂昂,姚中原,張宇,等.面向無人機自主巡檢的風電機組姿態(tài)計算和航跡規(guī)劃方法[J].風能,2023(1):68-77.
[4] 趙文璇,李明,周筑博.海上風電無人系統(tǒng)自主巡檢應用構(gòu)想[J].海洋技術(shù)學報,2022,41(2):110-118.
[5] 王馥華,顧沈驊,姚凱,等.基于無人機技術(shù)的風力發(fā)電機葉片自主巡檢系統(tǒng)[J].機械制造,2022,60(3):63-65.
[6] 湯翔,楊源.海上風電場智能無人巡檢方案研究[J].電工技術(shù),2021(20):12-14.
[7] 張晗,李存義,曹淑剛,等.無人機在海上風電機組葉片巡檢中的應用[J].能源科技,2020,18(5):67-70.
收稿日期:2024-05-27
作者簡介:李哲(1995—),男,河北石家莊人,碩士,助理工程師,三峽集團科學技術(shù)研究院專業(yè)師,研究方向:電站智能化運維。
