履帶車輛液壓懸架互聯模式及溫度變化研究
2024-10-12 00:00:00陳天宇劉剛張寶徠
機電信息 2024年19期
摘要:針對履帶車輛傳統獨立懸架減振性能較差的問題,提出將葉片式減振器互聯,在提高懸架系統減振性能的同時,降低了減振器內液壓油的溫度。首先,通過油管將懸架系統中的葉片式減振器互聯,并確定互聯模式;其次,依據多體動力學理論建立履帶車懸架系統半車力學模型和動力學方程;然后,基于RecurDyn和AMESim搭建履帶車整車動力學模型和液壓懸架模型,實現履帶車輛懸架系統的機-液-熱聯合仿真;最后,與獨立懸架進行行駛平順性和減振器溫度的對比分析。仿真結果表明,液壓互聯懸架同獨立懸架相比,可以有效提高懸架系統的減振性能,減振器互聯可以平均減振器內液壓油溫度。
關鍵詞:履帶車輛;溫度;互聯模式;液壓互聯懸架;平順性
中圖分類號:U461.4 文獻標志碼:A 文章編號:1671-0797(2024)19-0032-07
DOI:10.19514/j.cnki.cn32-1628/tm.2024.19.008
0 引言
現代履帶車輛,特別是高速履帶車輛對機動性的要求在不斷提高,懸架裝置的減振性能研究也在不斷深入。懸架系統的研究主要集中在被動懸架、主動懸架和半主動懸架三個方面。在被動懸架方面,滕緋虎[1]對扭桿懸架進行優化,設計了新型的懸架結構,并研究了新型懸架裝置對扭桿彈簧壽命的影響;嚴京璽等[2]研究了扭桿式履帶車輛懸架的非線性隨機最優控制。在主動懸架方面,汪若塵等[3]設計了饋能式機電主動懸架,但不宜應用在大噸位履帶車輛上;Wang等[4]提出了適用于高速履帶式車輛的千瓦級高功率密度機-電-液懸架系統;Meng等[5]提出了一種基于擴展高增益觀測器(EHGO)的新型車輛主動懸架控制方法。在半主動懸架方面,Wang等[6]采用改進的MSCTS算法針對半主動懸架履帶車輛,提出了一種新的智能最優控制策略;Han等[7]提出一種半主動自適應混合控制策略,提高了懸架系統對不同行駛工況的適應性;Amir Khajepour等[8]為了提高履帶車輛的平順性并降低武器振動,提出了一種履帶車輛半主動懸架系統的協調控制策略;W. G. Ata等[9]從理論上研究了一種磁流變履帶車輛懸架半主動控制方法。液壓互聯懸架(Hydraulically Interconnected Suspension,HIS)是一種被動油氣懸架,利用液壓油實現了各車輪的動力學互聯。Qin等[10]提出了一種新型多缸液壓氣動懸架系統用于公路軌道車輛的履帶式底盤,增強了車輛行駛性能。液壓互聯懸架相較于扭桿彈簧懸架,可以有效降低由路面不平所引起的車身及駕駛室振動,增強減振性能,并提高乘坐舒適性,同主動、半主動懸架相比,具有結構簡單、故障率低、功耗小、維修和維護成本低等優點,但國內外學者對于履帶車輛液壓互聯懸架的研究較少。鑒于此,本文提出將懸架系統中的葉片式減振器通過油管進行互聯,確定互聯模式,并闡述互聯懸架的工作原理及減振器互聯的降溫原理;搭建機械-液壓聯合仿真系統,對比獨立懸架進行行駛平順性及溫度仿真分析。
1 互聯懸架動力學模型
1.1 減振器互聯模式
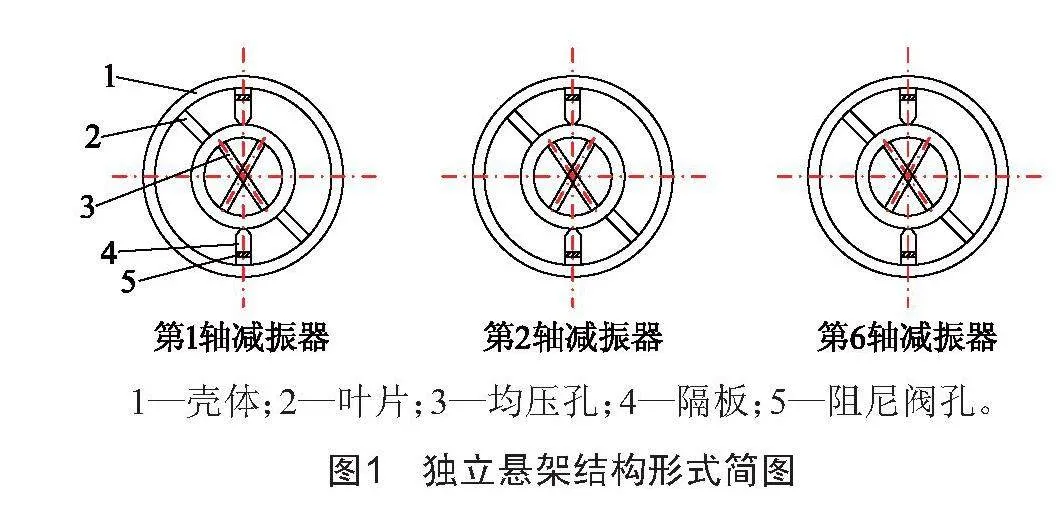
高速履帶車輛一般僅在車首、第二懸架以及車尾懸架上安裝減振器,以最大化車輛角阻尼,抑制車輛的俯仰振動。本文考慮到履帶車輛幾乎不發生側傾事故,因此只考慮俯仰工況,對同側葉片式減振器進行互聯。通過油管將車身不同位置的葉片式減振器的同相位工作腔互聯,同時在油管上安裝電磁閥,可根據工況進行開關以實現獨立或互聯工作。
當獨立懸架式履帶車輛發生振動時,減振器內的葉片會發生旋轉,若葉片順時針旋轉,Ⅱ腔由于受到葉片擠壓為高壓腔,而Ⅰ腔為低壓腔,兩腔存在壓力差,此時,Ⅱ腔中的液壓油經由阻尼閥孔流入Ⅰ腔。葉片逆時針旋轉時工作腔情況相反,但原理不變。液壓油與阻尼閥孔之間的節流作用和油液分子內部的摩擦形成了阻尼力矩,可抑制振動。獨立懸架結構形式簡圖如圖1所示。
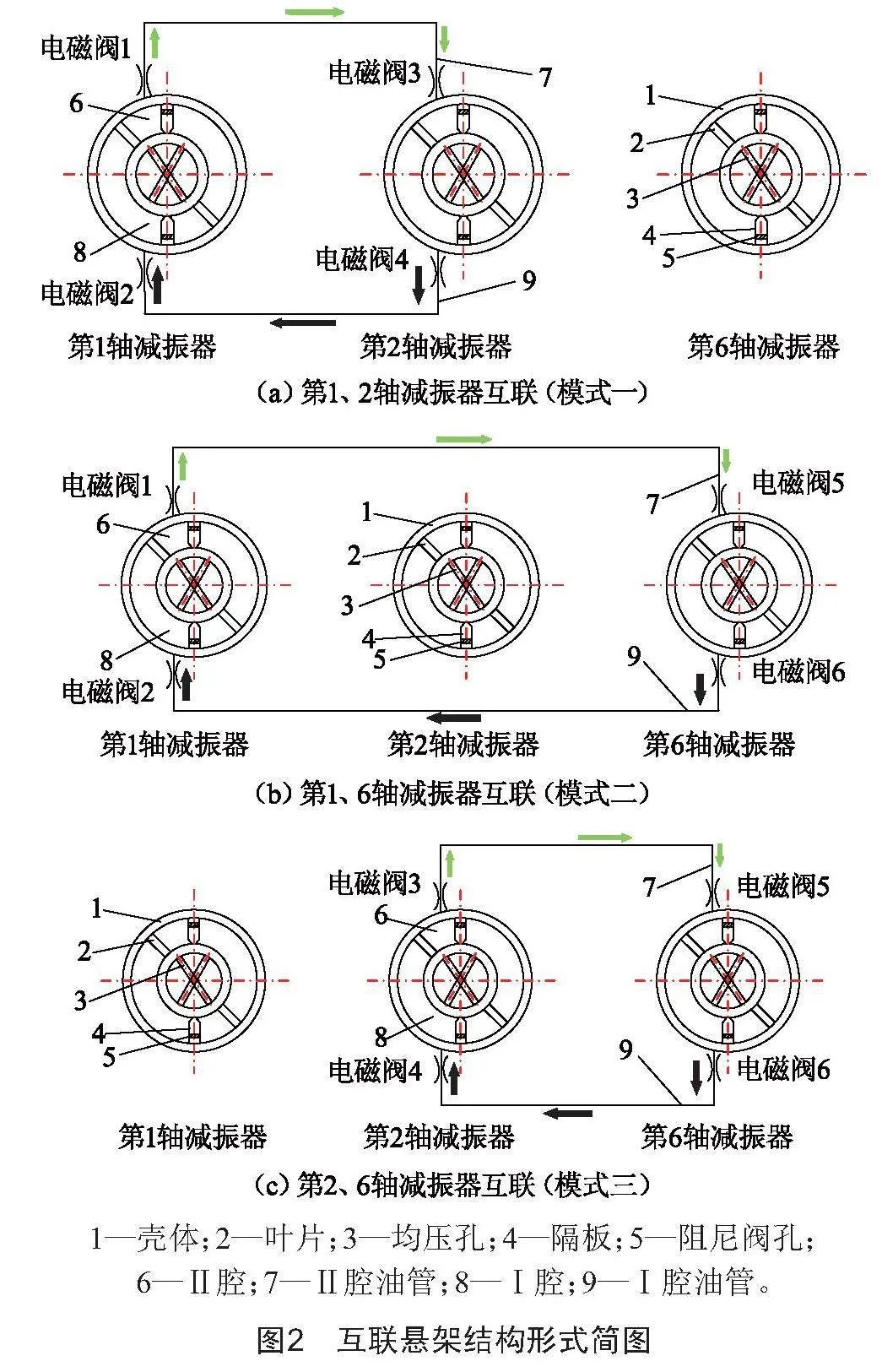
減振器互聯未改變減振器的內部結構,也未改變彈性元件的安裝方式及力學特性,結構簡單、安裝方便,三種互聯模式如圖2所示。
1.2 互聯懸架工作原理
當葉片2順時針旋轉時,兩個扇形區域較小的工作腔為高壓腔6,而兩個扇形區域較大的工作腔為低壓腔8。在此情況下,液壓油從高壓腔6經由阻尼閥孔5流入低壓腔8,同時,電磁閥2、4打開,液壓油通過Ⅰ腔的互聯油管返回至低壓腔8,液壓油流動情況如圖2黑色箭頭所示。當葉片2逆時針旋轉時,工作腔情況相反。兩個扇形區域較大的工作腔為高壓腔8,而兩個扇形區域較小的工作腔為低壓腔6。在此情況下,液壓油從高壓腔8通過阻尼閥孔5流入低壓腔6,同時,電磁閥1、3打開,液壓油通過Ⅱ腔的互聯油管返回到低壓腔6,液壓油流動情況如圖2灰色箭頭所示。
1.3 互聯懸架力學模型
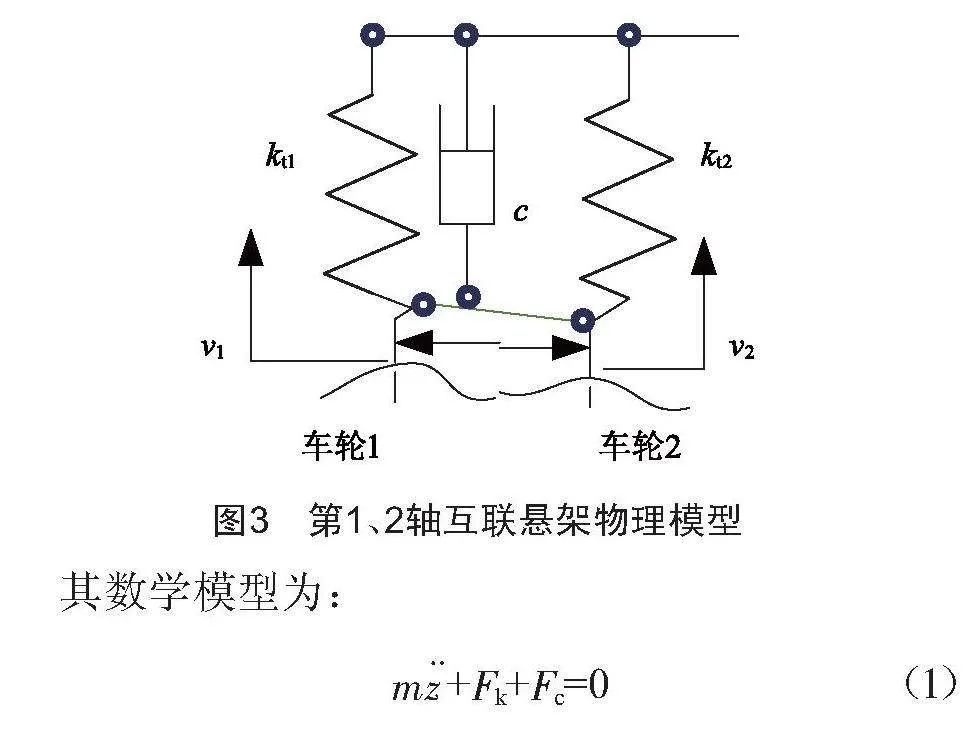
以半車為研究對象。彈性元件力學特性不變,而第1、2車輪上方的阻尼元件由于液壓連通,可等效為位于第1、2懸架之間的減振器,上端與車體固連,下端與第1、2車輪同時鉸接,其物理模型如圖3所示。
其數學模型為:
m+Fk+Fc=0 (1)
式中:m為第二懸架支承車體的等效質量;為車體振動加速度;Fk為彈性力;Fc為阻尼力,可表示為Fc=cv1+
cv2,其中,c為減振器等效線性阻尼系數,v1、v2為第1、2懸架垂向運動速度,當車輪隨著地面起伏時,其相對運動速度為第1、2懸架相對速度的平均值。
從物理模型上看,液壓油管充當平衡拉桿,懸架系統具有平衡懸架的特性,相當于降低了路面高程變化率。同時,由于減振器互聯不改變彈性元件的安裝方式及力學特性,避免了傳統懸架存在的行程小、結構復雜、笨重等問題。因此,與獨立懸架相比,減振器互聯具有其部分優點,但無其缺點。
1.4 減振器互聯降溫原理分析
當減振器互聯后,如果存在壓力差,部分液壓油將在兩減振器內流動,平衡兩減振器壓力,表現出減振器串聯工作特性。這種互聯有助于降低減振器的溫度,過濾路面不平造成的影響。
懸架之間的運動關系主要分以下兩類:
1)兩者同向運動:此時兩減振器均處于壓縮或拉伸行程。如果獨立工作,則兩個減振器合力為F=cv1+
cv2,共產生的熱量為Q=c(v12+v22)。如果互聯,由于壓力差,兩個減振器阻尼力及產生的熱量將重新分配,但減振器合力與產生的總熱量基本不變。
2)兩者反向運動:如果兩者獨立,則兩個減振器的合力F=cv1-cv2,產生的熱量仍為Q=c(v12+v22)。如果互聯,則因流量互相補償,兩個減振器合力變化不大,但產生的熱量大幅降低。以v1=v2這個特例為例,如果獨立,則兩個減振器產生的合力為0,而產生的熱量為Q=2cv12;如果互聯,由于流量恰好互相補償,兩個減振器均不輸出阻尼力,合力為0,產生的熱量也為0。在這種情況下,互聯產生的熱量減少了,但由于力的效果相同,因而平順性相同。除均衡熱量外,互聯懸架還具有降低減振器不當功耗的作用,即產生的總熱量減小了。
2 履帶車輛整車多體動力學模型
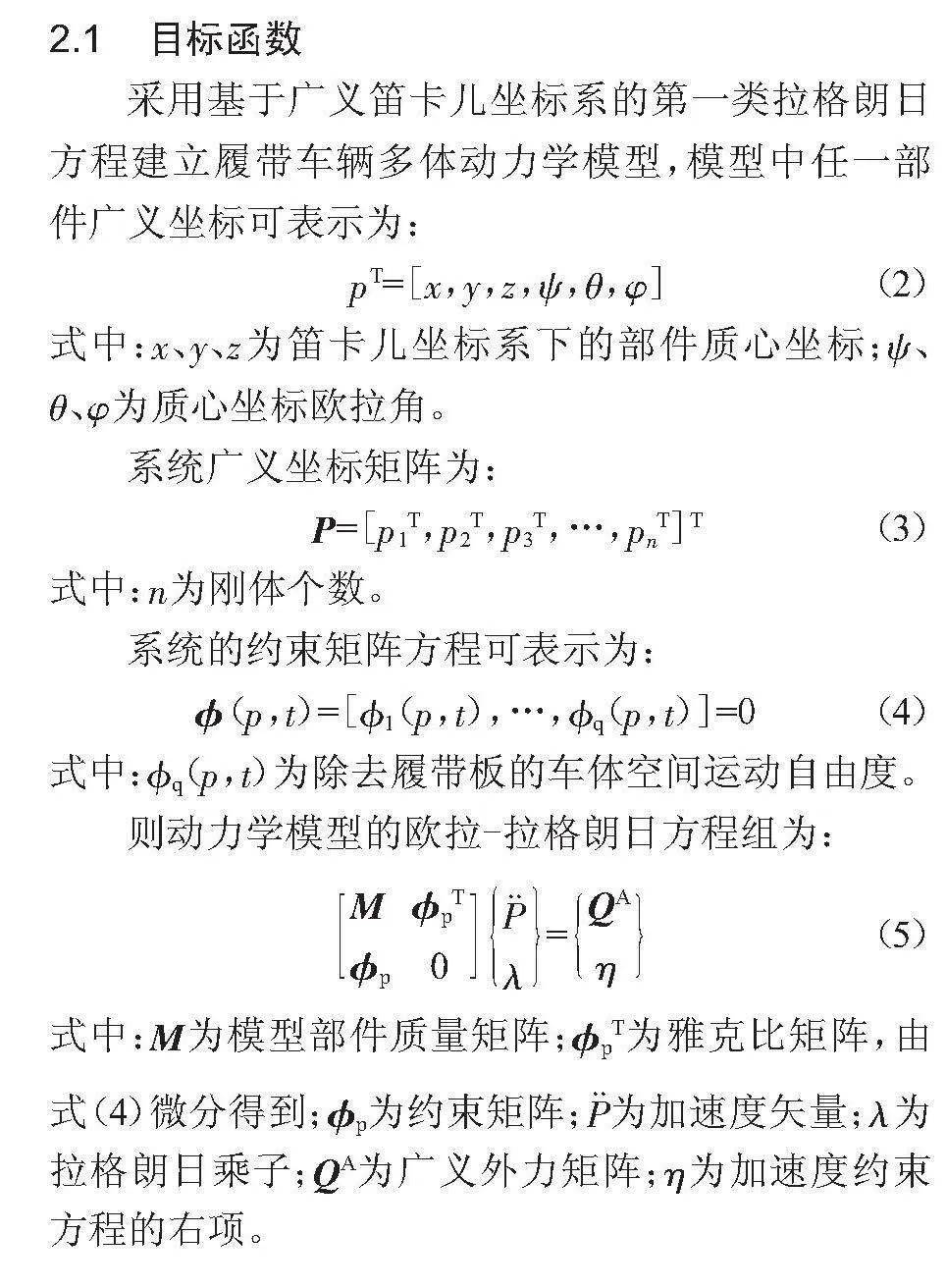
2.1 目標函數
采用基于廣義笛卡兒坐標系的第一類拉格朗日方程建立履帶車輛多體動力學模型,模型中任一部件廣義坐標可表示為:
pT=[x,y,z,ψ,θ,φ] (2)
式中:x、y、z為笛卡兒坐標系下的部件質心坐標;ψ、θ、φ為質心坐標歐拉角。
系統廣義坐標矩陣為:
P=[p1T,p2T,p3T,…,pnT]T (3)
式中:n為剛體個數。
系統的約束矩陣方程可表示為:
?(p,t)=[?1(p,t),…,?q(p,t)]=0 (4)
式中:?q(p,t)為除去履帶板的車體空間運動自由度。
則動力學模型的歐拉-拉格朗日方程組為:
M ?pT
?p 0
λ=QA
η (5)
式中:M為模型部件質量矩陣;?pT為雅克比矩陣,由式(4)微分得到;?p為約束矩陣;為加速度矢量;λ為拉格朗日乘子;QA為廣義外力矩陣;η為加速度約束方程的右項。
2.2 行動系統模型
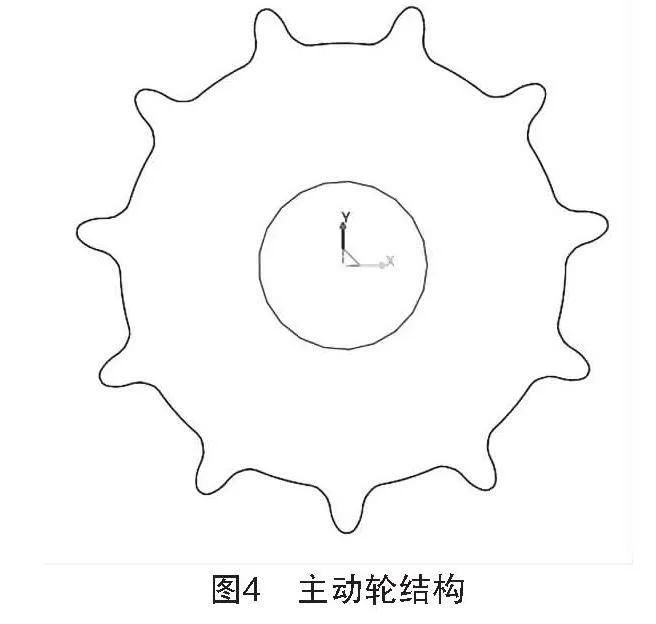
整車動力學模型的建立分為車輛行動系統以及車身,行動系統可通過RecurDyn中的Track/HM模塊建立模型。在保證質心位置等關鍵參數不變的條件下,對所選的某型履帶車模型進行簡化。簡化后的行動系統包括6對負重輪、3對托帶輪、1對主動輪、1對誘導輪和1對張緊裝置。履帶子系統采用雙銷式履帶和雙輪緣負重輪結構。主動輪采用后置方式,齒數為10。
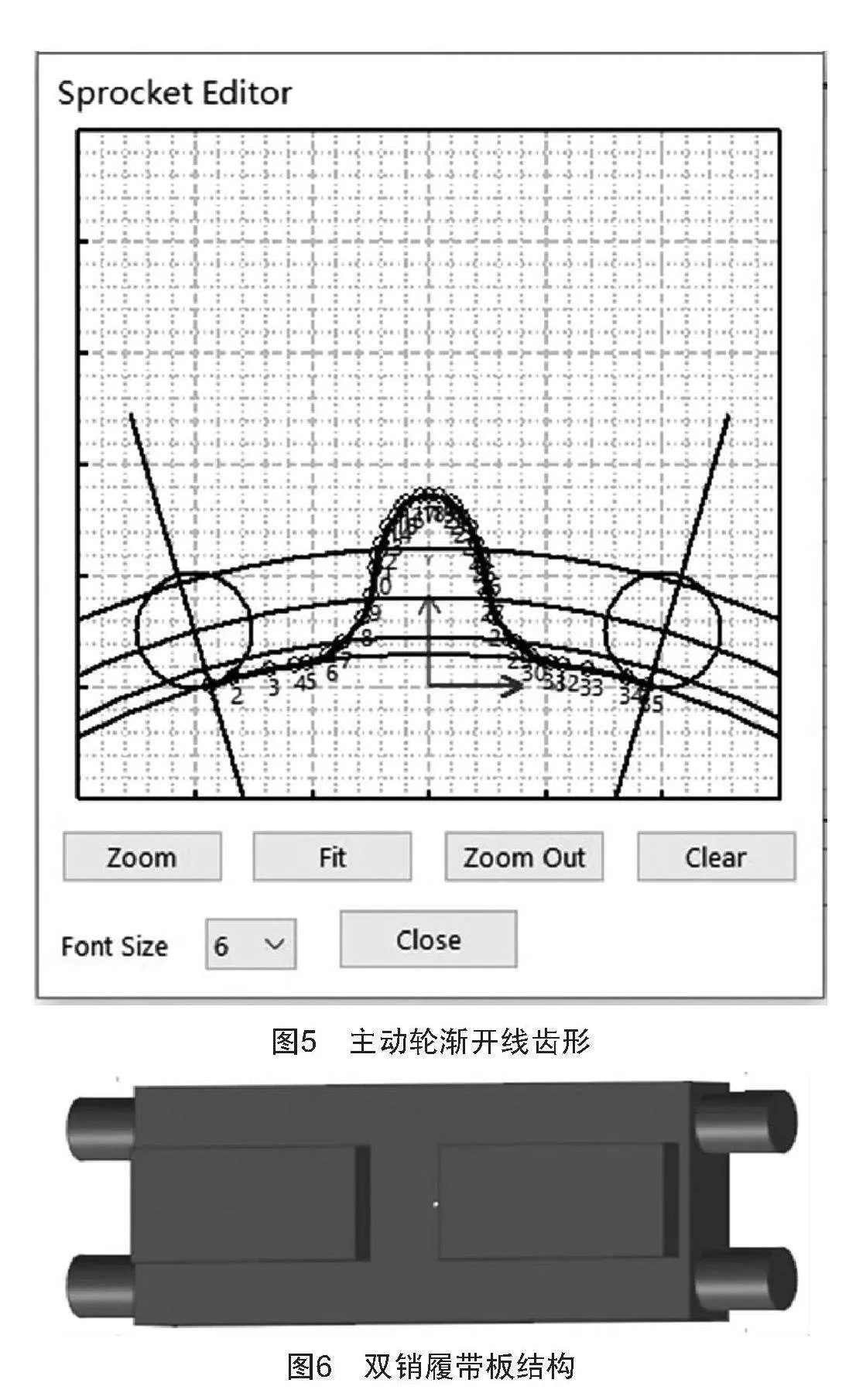
2.2.1 主動輪模型
在RecurDyn中,主動輪、負重輪與拖帶輪的建模方法相同,在此只對主動輪的建模進行介紹。主動輪的作用是在驅動工況下將由發動機通過傳動裝置傳遞到主動輪上的驅動轉矩轉換成履帶的驅動力,在制動工況下將制動器傳遞過來的制動轉矩轉變為履帶的制動力。主動輪的齒面形狀對履帶車輛仿真具有重要影響,齒面形狀的基本參數參考所選履帶車輛的真實數據,而精確的齒形則需要根據對實體模型進行分析得出的齒形剖面文件進行定義,主動輪結構及漸開線齒形如圖4、圖5所示。
2.2.2 履帶子系統
在仿真過程中需要考慮履帶的接觸碰撞、摩擦等多個因素。履帶環是由連接銷將履帶板連接在一起形成的,與各個輪共同組成履帶環系統。本文中使用的是雙銷掛膠履帶,每塊履帶板上有兩個掛膠履帶銷孔,相鄰的履帶板之間通過履帶銷和端聯器進行連接。雙銷履帶板的基本結構如圖6所示。
2.3 路面模型
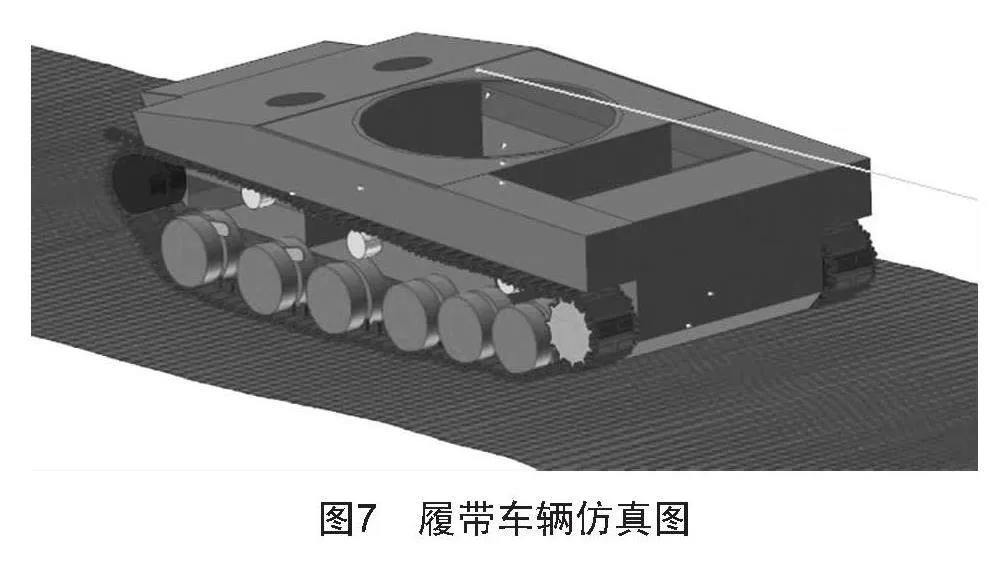
在RecurDyn中,有兩種方法可以生成三維路面模型。一種方法是利用樣條曲線在路面模塊中自動生成路面模型,另一種方法是通過讀取RDF(Road Data File)文件來直接生成路面模型。選擇通過讀取RDF文件生成仿真路面,該路面模型可以反映履帶與地面之間的接觸力,而且兩側履帶所經過的路面也可以具有獨立的不平度。RDF文件根據某試驗場所采集的路面不平度數據進行編譯。履帶車輛在試驗場跑道上的仿真效果圖如圖7所示。
3 聯合仿真分析
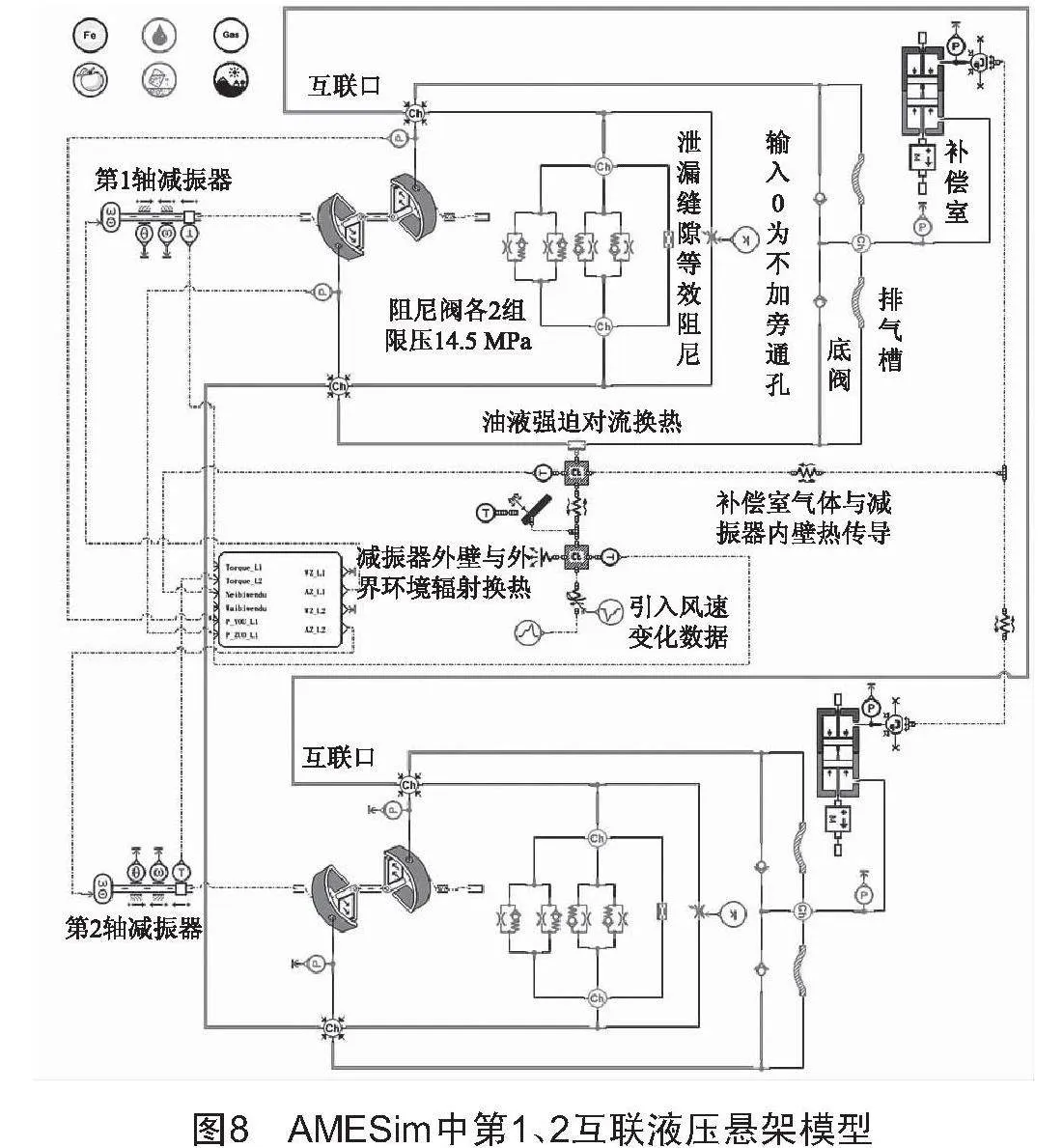
利用RecurDyn的Track/HM模塊以及整車參數建立了履帶車多體動力學模型;利用AMESim中的機械庫、熱庫、熱液壓庫等搭建液壓互聯懸架模型,如圖8所示。
為研究減振器不同互聯形式對行駛平順性和減振器溫升的影響,分別對采用獨立懸架以及模式一、二、三的液壓互聯懸架的某履帶車輛進行了整車平順性聯合仿真試驗研究。
3.1 平順性仿真分析
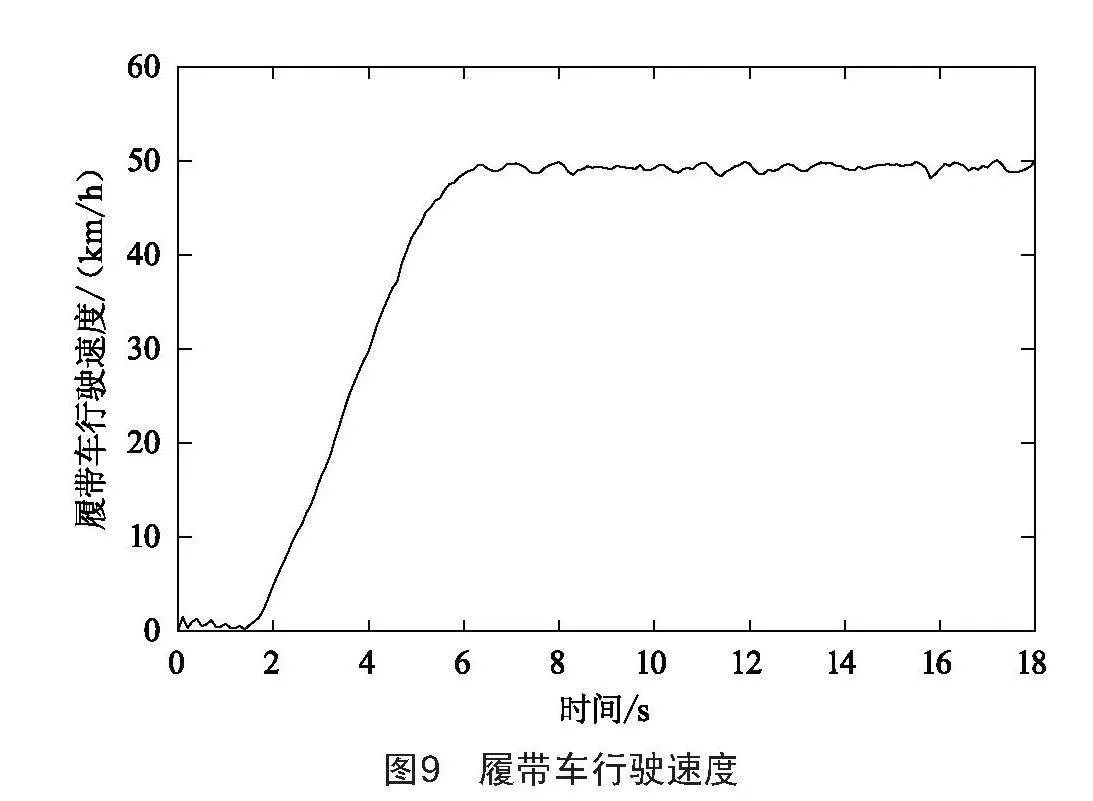
根據GJB 59.15—1988《裝甲車輛試驗規程 野外振動試驗》的評價方法和相關要求,對履帶車輛進行模擬試驗,通過試驗獲得車身質心垂向振動加速度和車身俯仰角的性能曲線。履帶車輛的行駛速度是在RecurDyn軟件的履帶子系統中利用STEP函數對主動輪施加STEP(TIME,1,0,6,(V_angle)*1d)的旋轉角速度,如圖9所示。
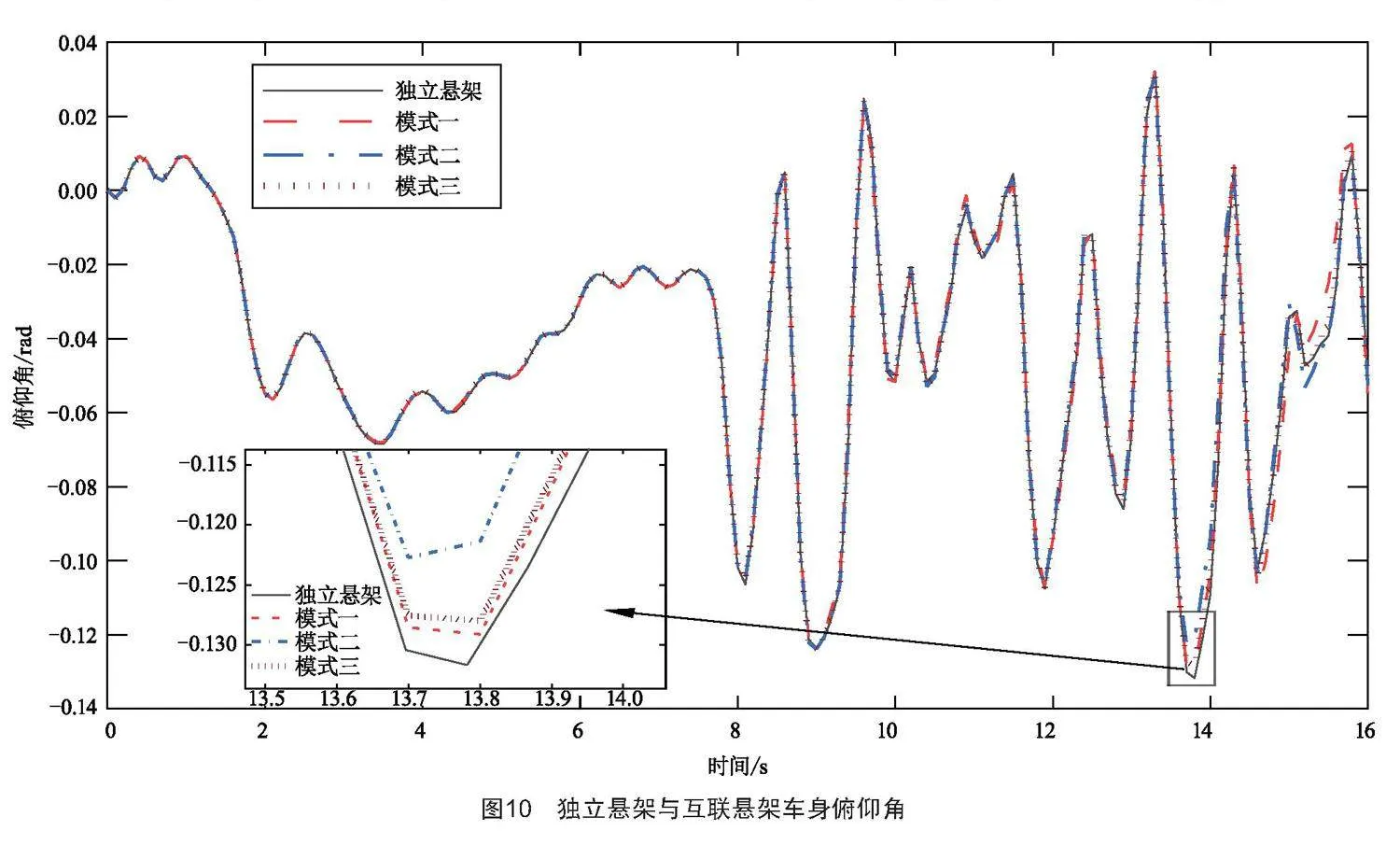
為了對比懸架結構形式對車輛性能的影響,兩個仿真采用相同的路面和行駛速度。在0~1 s內施加的旋轉角速度為0,在這個時間段內在液壓減振器初始壓力的作用下,車身會產生垂向振動并逐漸衰減;而后在1~6 s內旋轉角速度逐漸增大,到6 s時達到最大,并維持此速度不變。整個仿真過程歷時16 s,仿真結果如圖10所示。
基于圖10并計算車身俯仰角均方根值可得:
1)模式一:車身俯仰角最大值降低了1.97%,俯仰角均方根值降低了0.28%。
2)模式二:車身俯仰角最大值降低了6.83%,俯仰角均方根值降低了1.65%。
3)模式三:車身俯仰角最大值降低了2.81%,俯仰角均方根值降低了0.91%。
綜上所述,模式二減振性能最優。
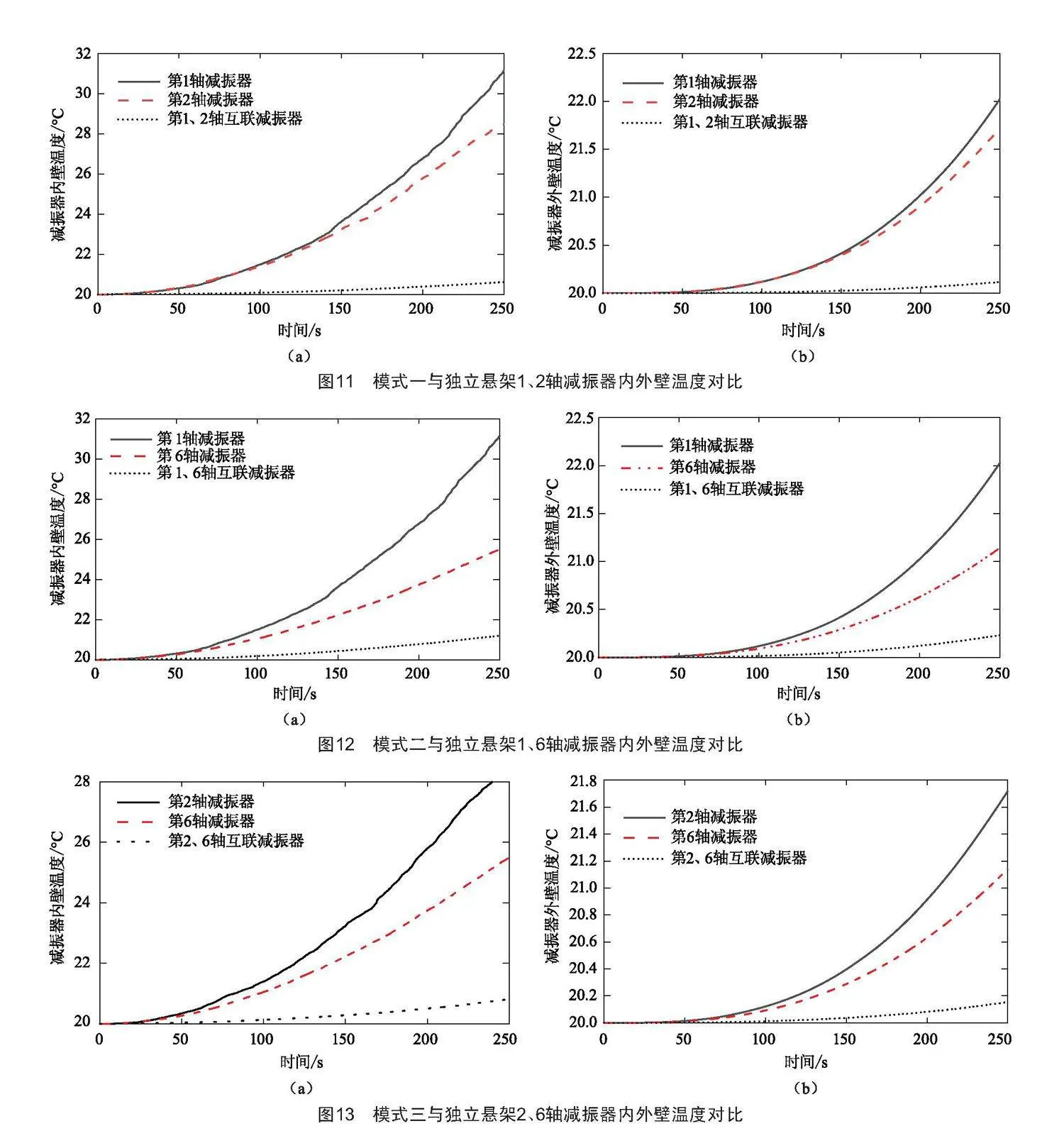
3.2 減振器溫度變化
仿真時間設為250 s,減振器獨立與互聯工作時,第1、2、6軸減振器內外壁溫度如圖11~13所示。當履帶車輛在非鋪裝路面上行駛時,第1軸減振器首先受到較大的振動沖擊,會導致減振器頻繁地進行調節和工作,而第2、6軸減振器相較于第1軸減振器所受沖擊較小,因此第1軸減振器液壓油溫度高于第2、6軸。減振器內外壁溫度差距較大的原因主要源于仿真過程考慮了風速對減振器外壁的影響,在行駛過程中減振器外壁受到風速影響散熱更快,導致外壁溫度較低。
仿真結果表明,減振器互聯可平均減振器內外壁溫度,未互聯的減振器溫度幾乎無變化。
1)模式一:第1軸減振器內外壁溫度降低10.53、1.91 ℃,降幅為33.81%、8.67%;第2軸減振器內外壁溫度降低7.87、1.60 ℃,降幅為27.63%、7.37%。
2)模式二:第1軸減振器內外壁溫度降低9.95、1.79 ℃,降幅為31.94%、8.14%;第6軸減振器內外壁溫度降低4.32、0.91 ℃,降幅為16.92%、4.30%。
3)模式三:第2軸減振器內外壁溫度降低7.67、1.56 ℃,降幅為26.93%、7.20%;第6軸減振器內外壁溫度降低4.70、0.99 ℃,降幅為18.42%、4.67%。
4 結論
本文以履帶車輛液壓互聯懸架為研究對象,建立了液壓互聯懸架的機-液-熱仿真模型和履帶車整車模型,與獨立懸架式履帶車輛在試驗場路面下進行平順性對比分析,得出以下結論:
1)三種模式的液壓互聯懸架降低了車身俯仰角最大值,降幅分別為1.97%、6.83%、2.81%,其中模式二減振性能最優。
2)減振器互聯可平均液壓油的溫度,隨著溫度降低液壓油粘度上升,懸架系統的減振性能提高。
[參考文獻]
[1] 滕緋虎.履帶式裝甲車懸掛優化及減振性能研究[D].太原:中北大學,2017.
[2] 嚴京璽,夏磊,宋慧新,等.扭桿式履帶車輛機電懸架的非線性隨機最優振動控制[J].力學與實踐,2020,42(6):717-725.
[3] 汪若塵,丁彥姝,孫東,等.基于路面激勵自適應的液電饋能懸架動力學性能協調控制[J].農業工程學報,2019,35(6):55-64.
[4] WANG C,ZHANG W J,WANG G S,et al.Research on a high power density mechanical-electrical-hydraulic
regenerative suspension system for high-speed tracked vehicles[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Auto-
mobile Engineering, 2022, 236(12):2711-2724.
[5] MENG Q H,LI B J,HU C.Nonlinear vehicle active suspension system control method based on the extended high gain observer[J].International Journal of Vehicle Design,2023,91(4):303-321.
[6] WANG F C,WANG D C,SUN J,et al.Intelligent optimal control for the crawler vehicle with semi-active suspension using modified staged continuous tabu search algorithm[J].Transactions of the Institute of Measurement and Control,2018,40(13).
[7] HAN S S,CHAO Z Q,LIU X B.A semiactive and adaptive hybrid control system for a tracked vehicle hydropneumatic suspension based on distur-
bance identification[J].Shock and Vibration, 2017:1-12.
[8] LI J F,KHAJEPOUR A,HUANG Y J,et al.A new coordinated control strategy for tracked vehicle ride comfort[J]. Proceedings of the Institution of Mechanical Engineers,Part K:Journal of Multi-
body Dynamics,2018,232(3):330-341.
[9] ATA W G,SALEM A M.Semi-active control of tracked vehicle suspension incorporating magnetorheologi-
cal dampers[J].Vehicle System Dynamics,2017,55(5).
[10] QIN B N,ZENG R Y,LI X M.Design and performance analysis of the hydropneumatic suspension system for a novel road-rail vehicle[J].Applied Sciences,2021,11(5):2221.
收稿日期:2024-05-28
作者簡介:陳天宇(1998—),男,遼寧錦州人,碩士研究生,研究方向:車輛懸架系統理論與控制。
