輸電鐵塔高空作業安全防護裝置的設計
2024-10-25 00:00:00李星濤李宗和張福永黃小虎王偉
機械制造與自動化 2024年5期

摘 要:現階段高壓線路檢修人員在攀爬高壓電塔時存在安全隱患問題,在詳細分析整個作業流程的基礎上,針對無人機應用需求設計一種輸電鐵塔高空作業安全防護裝置。創新設計安全防護裝置的自動固定機構和釋放機構,通過有限元方法分析自動固定機構支架的受力狀況。利用ADAMS軟件搭建虛擬樣機,對整個安全防護裝置的工作過程進行仿真驗證。結果表明:該安全防護裝置整體設計方案合理可行,為提高高空作業人員的安全防護提供了有效解決方案。
關鍵詞:高空作業;安全防護裝置;無人機技術;自動固定機構;虛擬樣機仿真
中圖分類號:TH136" 文獻標志碼:B" 文章編號:1671-5276(2024)05-0268-05
Design of Safety Protection Device for Overhead Operation of Transmission Tower
Abstract:To prevent the potential safety hazard of high-voltage line maintenance personnel climbing high-voltage tower and based on the detailed analysis of the whole operation process, a safety protection device for overhead operation of transmission tower is designed according to the application requirements of UAV. The automatic fixing mechanism and release mechanism of safety protection device are designed innovatively, and the stress state of the bracket of automatic fixing mechanism is analyzed by finite element method. ADAMS software is applied to build a virtual prototype, and the working process of the whole safety protection device is simulated and verified. The results show that the overall design scheme of the device is reasonable and feasible, which provides an effective solution to the improvemen of safety protection for aerial workers.
Keywords:aerial work;safety protection device;UAV technology;automatic fixing mechanism;virtual prototype simulation
0 引言
電能作為一種經濟適用、易于傳輸和控制的清潔能源被廣泛應用于動力、照明等各個領域[1-2]。近年來,隨著我國在高壓輸電技術領域的大量投入和深入研究,使得我國在此領域處于世界領先水平。“西電東輸”工程的建設,進一步推進了我國在電力建設方面的發展[3]。
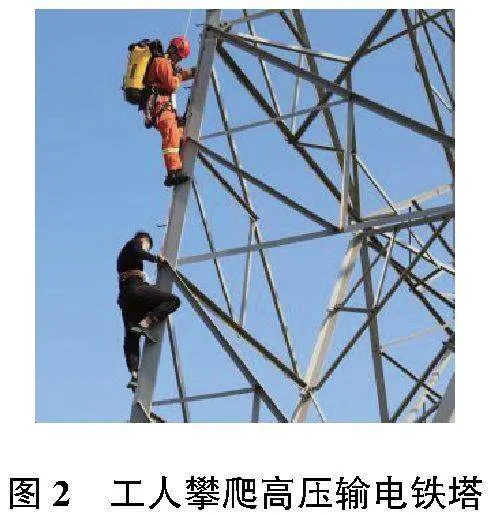
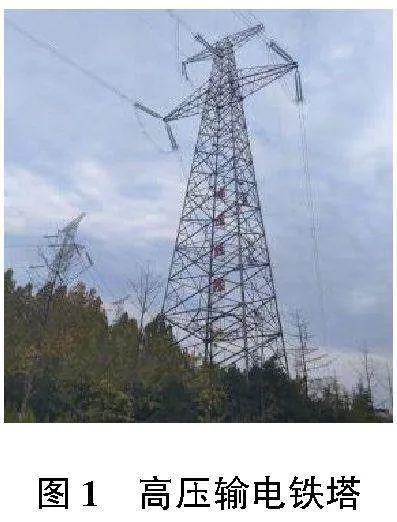
電力建設的高速發展,導致高壓電塔的數量急劇增加,高空帶電作業成為保障電力系統正常運行的重要環節。高壓電塔為鐵制框架結構,高度可達數十米,其結構如圖1所示。現階段,對電路的檢修需要檢修人員徒手攀爬至高壓電塔頂端完成,過程如圖2所示。在工人攀爬電力鐵塔過程中會受環境溫度、鐵塔高度、人員身體狀況等諸多因素影響,同時還需攜帶大量工具、工件等物品進行塔上作業,給作業人員帶來較大負擔。因此,亟需一種集安全防護、部署靈活、便捷高效等特點于一身的安全防護裝置以解決上述問題。
1 問題分析及方案確定
1.1 問題分析
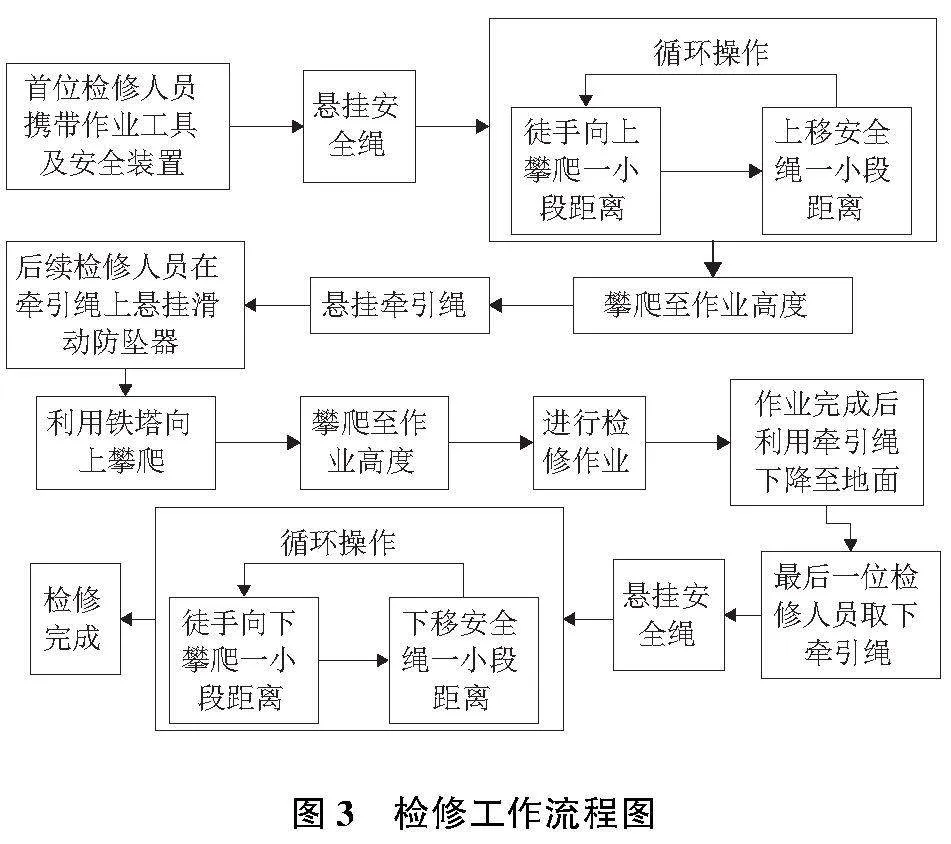
檢修人員通過徒手攀爬至鐵塔頂端的檢修方式是現階段的必要手段,短期內難以利用其他技術手段來有效替換。現有檢修人員的工作流程如圖3所示。首先需要首位檢修人員攜帶作業工具和安全裝置,在攀爬電塔之前利用塔身懸掛安全繩,由于人體手臂長度有限,安全繩懸掛點只能位于頭部高度。因此,在向上攀爬過程中需頻繁移動安全繩懸掛點,經過多次交替移動安全繩懸掛點逐步攀爬至作業高度。在塔身橫梁處將牽引繩懸掛后,牽引繩下垂至地面,后續檢修人員利用牽引繩懸掛滑動防墜器,攀爬鐵塔至作業高度進行作業。完成檢修作業后利用牽引繩下降至地面,最后一位檢修人員取下牽引繩裝置,再通過交替向下移動安全繩的方式逐步下降至地面。
分析整個檢修過程,最大安全隱患主要集中在首位檢修人員向上攀爬和最后一位檢修人員向下攀爬的過程中。在此過程中為最大程度保護攀爬人員,需選擇交替移動安全繩的方式實現。但此方式不僅會大量消耗檢修人員的體力,而且此種懸掛安全繩的方式難以有效保護檢修人員,并且在移動安全繩過程中也是極其危險的。其他檢修人員在向上或向下攀爬過程中利用牽引繩和滑動防墜器代替安全繩的作用,可有效避免交替移動安全繩的問題,極大提高了檢修人員的安全。
經過上述分析,在檢修過程中如何減輕首位檢修人員的體力消耗,提高其攀爬過程的安全性已成為解決此問題的首要目標。
1.2 方案確定
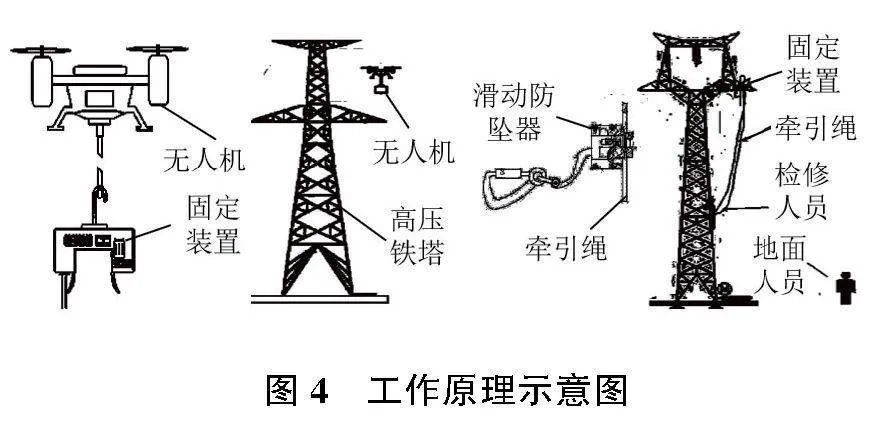
在整個作業過程中,若能提前將牽引繩懸掛完成,使得首位檢修人員和后續人員一樣,可利用牽引繩和滑動防墜器配合保證其攀爬過程的安全,則可有效解決上述問題。因此,本文利用無人機技術配合所設計的安全防護裝置實現此過程,其工作過程如圖4所示。
首先利用遠程遙控技術操控無人機攜帶安全防護裝置及牽引繩釋放裝置飛至鐵塔適當高度。利用攝像頭傳輸畫面尋找合理固定點,當安全防護裝置順利落在鐵塔橫梁上之后,通過遠程遙控系統控制固定機構進行導向、固定和鎖緊。牽引繩釋放裝置將牽引繩放下后,作業人員利用滑動防墜器做好相關防護工作后進行攀爬。當塔上檢修作業結束,工作人員安全返回地面后,通過遙控系統釋放塔上固定機構,并由無人機攜帶安全防護裝置返回地面。該方案通過無人機技術實現牽引繩的懸掛,能最大程度保護爬塔人員的安全,可有效提高作業人員的安全防護和爬塔效率。
2 安全防護裝置的設計
2.1 整體設計
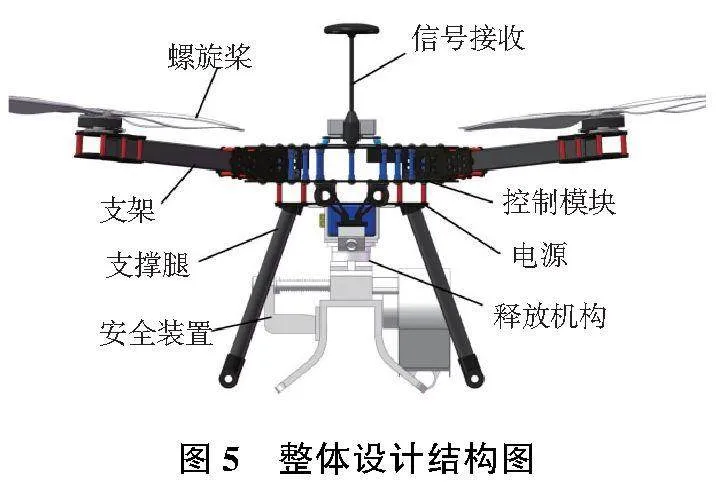
根據上述分析設計的整體結構如圖5所示。整體結構主要由無人機和下端的安全防護裝置組成。無人機選用四軸設計,通過十字形支架固定無刷電機, 利用無刷電機驅動4片槳葉旋轉產生向上的推力。由于4個電機軸距幾何中心的距離相等, 可保證對角2個軸產生的升力相同,使得力矩平衡, 確保四軸航向的穩定。四軸無人機具有可以垂直起降、空中懸停、結構簡單、操作靈活等優點[4]。無人機下端的安全防護裝置主要由自動釋放機構、自動固定機構和牽引繩釋放機構組成。在無人機下端固定失電型電磁鐵作為自動釋放機構。失電型電磁鐵可在失電狀態下產生強大的吸附力,而在通電狀態下不產生吸附力[5]。僅僅通過控制電源的通、斷即可實現無人機對安全防護裝置的自動釋放功能。安全防護裝置在被無人機放置在橫梁上后,可通過遠程遙控固定機構實現導向固定和鎖緊功能。固定機構固定完成后牽引繩釋放機構釋放牽引繩,檢修人員利用牽引繩可安全高效地完成爬塔作業。
2.2 安全防護裝置設計
常見高壓電塔均采用鍍鋅角鐵搭建而成,如何確保安全防護裝置與鍍鋅角鐵橫梁可靠連接是保證牽引繩懸掛安全可靠的關鍵。本文設計的安全防護裝置如圖6所示。整體主要由牽引繩釋放器、自動釋放機構和自動固定機構組成。整個安全防護裝置上方為失電型電磁鐵,可通過控制通、斷電路實現自動釋放功能。固定機構由支架和上方設置的驅動電機、滑桿和絲杠組成,鎖扣與滑桿和絲杠配合處分別設置有直線軸承和螺母。當安全防護裝置放置在橫梁上后,固定機構運行,通過電機驅動絲杠轉動可帶動鎖扣沿滑桿移動,從而鎖緊鐵塔橫梁,達到可靠固定的效果。采用具有自鎖特性的絲杠螺母機構,可保證在驅動電機斷電情況下鎖扣不會自行移動,提高了其安全性。在支架下端設置有導向桿,便于無人機將安全防護裝置放置在橫梁之上。支架側面固定有牽引繩釋放器,可自主釋放和回收牽引繩。整個安全防護裝置可實現牽引繩的可靠懸掛,大大提高了作業效率和安全性。
2.3 控制系統
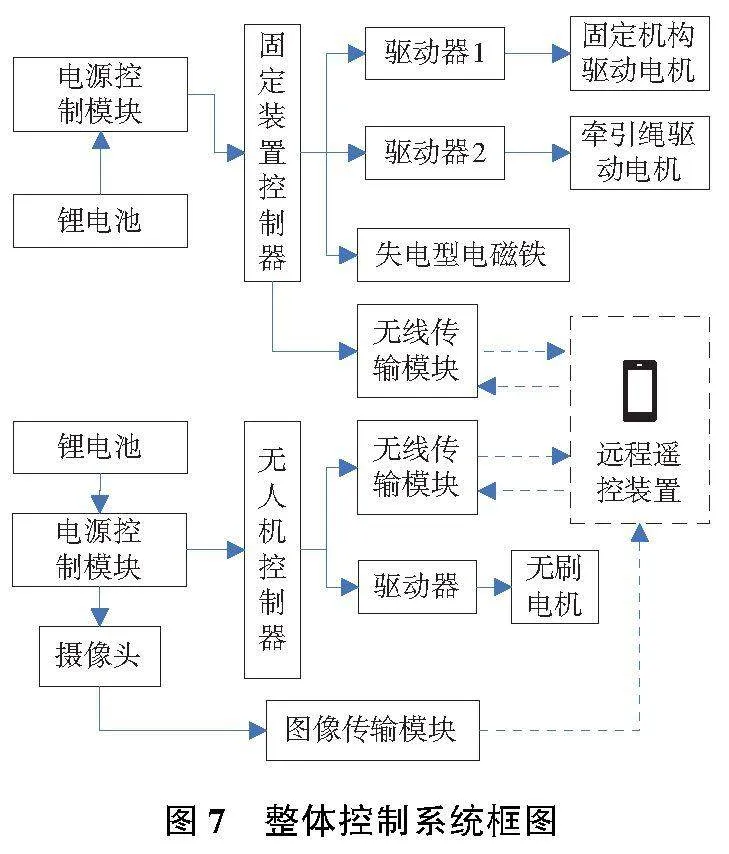
整個控制系統框圖如圖7所示,包括無人機飛行控制系統和安全防護裝置控制系統。無人機控制系統主要用于控制4個無刷電機轉速,從而實現自身飛行狀態的調整。無人機上安裝的攝像頭通過圖像傳輸模塊將實時畫面傳輸至遠程控制裝置[6],便于操控人員對無人機飛行姿態的調整和安全防護裝置的放置。安全防護裝置控制系統用于控制自動固定機構的鎖緊和牽引繩的釋放。當無人機將安全防護裝置運送至懸掛點附近后,利用實時回傳的圖像調整無人機姿態[7],將安全防護裝置準確放置在高壓鐵塔橫梁上后,發送鎖緊信號,自動固定機構電機啟動,通過絲杠螺母機構驅動鎖扣鎖緊。通過攝像頭畫面判斷可靠鎖緊后給失電型電磁鐵供電,使安全防護裝置與無人機脫離,操控無人機返回地面。發送信號控制啟動牽引繩電機啟動將牽引繩釋放,完成整個牽引繩懸掛作業。
在檢修人員完成作業全部返回地面后,發送信號使牽引繩釋放電機啟動收回牽引繩,操控無人機至安全防護裝置附近,通過實時回傳畫面調整無人機接近安全防護裝置,失電型電磁鐵吸附在無人機下端支架后,遙控啟動自動固定機構的驅動電機,使固定機構脫離橫梁,由無人機攜帶安全防護裝置返回地面。
3 分析與計算
3.1 自動固定機構支架的有限元分析
支架作為自動固定機構的關鍵部件,在人員發生跌落危險時起到主要受力作用,其設計的合理性和受力的安全性極其關鍵。因此對固定支架結構進行受力分析,以此驗證固定支架的可靠性,為后續的進一步優化提供方向。
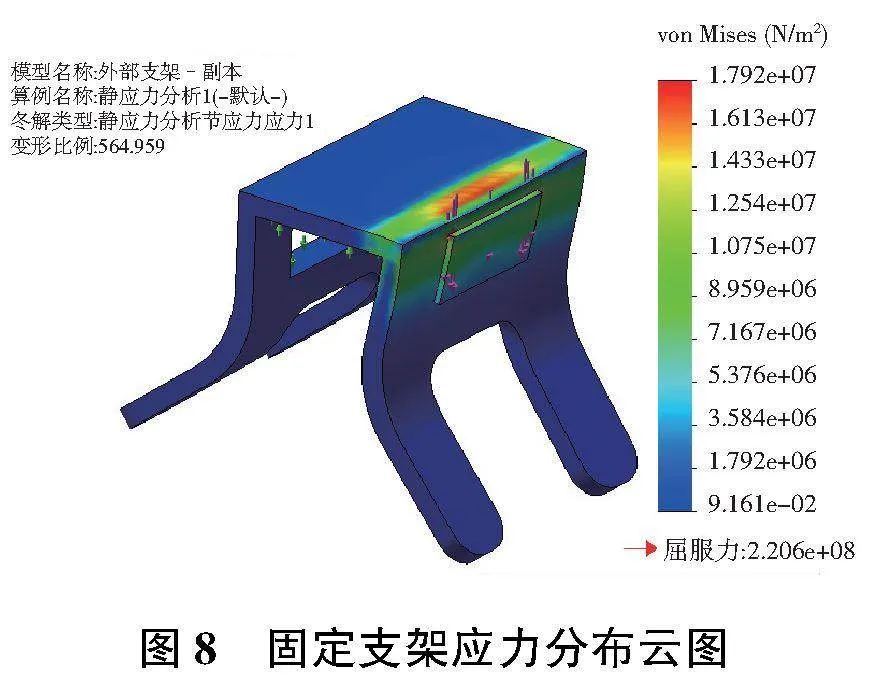
固定支架選取普通碳素結構鋼(Q235),其彈性模量為2.1×1011N/m2,泊松比為0.3,抗拉強度為5×108N/m2,屈服強度為2.35×103N/m2。為確保安全,選取靜載荷為實際工況的3倍。檢修工人的身體質量設為80kg,g取10N/kg,則設定載荷為2 400N。在固定支架與鎖扣和橫梁接觸處設置夾具為滾柱接觸,可發生一定的相對滑動。利用高品質網格進行分析計算,得出的有限元應力分析云圖如圖8所示。
由圖8可以看出,其應力最大點位于牽引繩懸掛一側的折彎處,最大應力為1.8×103N/m2,小于屈服強度,整個固定支架安全可靠。但從安全角度分析,在牽引繩懸掛一側的折彎處有較為明顯的應力集中,可能會導致安全隱患,若后續要增加安全系數,則可在折彎處加厚,加工時注意過渡結構為圓弧,防止應力集中產生的危害。
3.2 失電型電磁鐵的選型
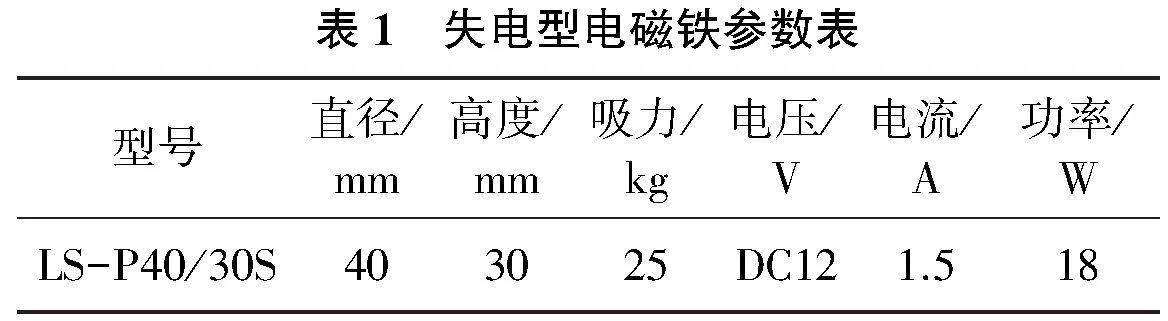
自動釋放機構作為無人機攜帶安全防護裝置的關鍵部件,其吸附力大小需根據安全防護裝置質量合理選型。利用建模軟件設定各部件材料,分析其質量屬性得出整個安全防護裝置總質量為14.2kg。根據需攜帶質量選擇失電型電磁鐵型號為LS-P40/30S,該型號的各項參數如表1所示。
4 虛擬樣機搭建仿真與實驗
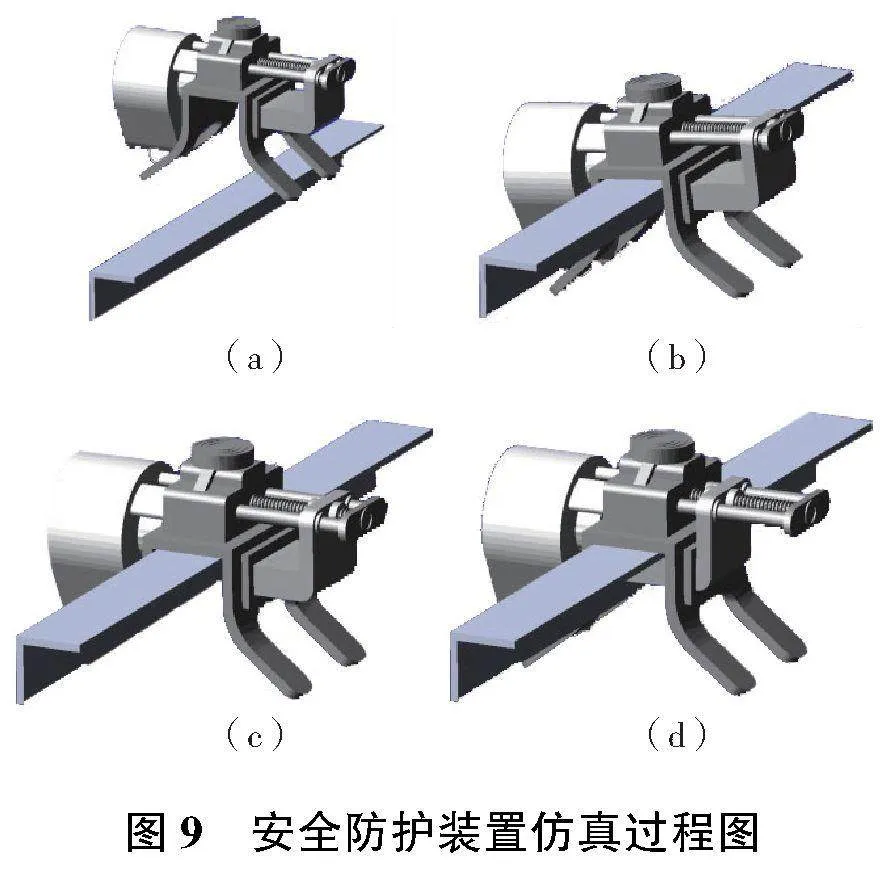
ADAMS作為現階段常用的多體動力學分析軟件,可對虛擬樣機進行準確仿真,快速評估各種載荷和作用力對運動的影響[8]。安全防護裝置在橫梁上方的一定高度釋放,可否穩定固定在橫梁之上,與安全防護裝置的結構設計和穩定性直接相關。因此使用虛擬樣機對此過程進行仿真,便于后續進一步改進。使用SolidWorks完成建模后導入ADAMS中,根據實際工況設定相關參數,設定釋放高度15cm,仿真時長6s,步長600步。整個仿真過程如圖9所示。
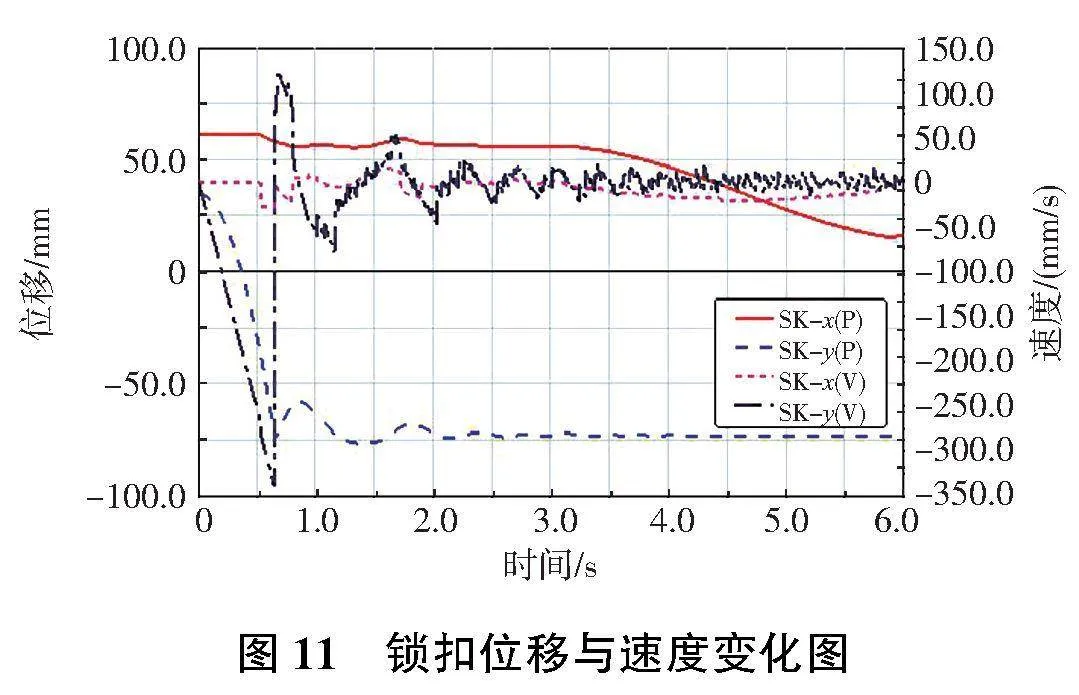
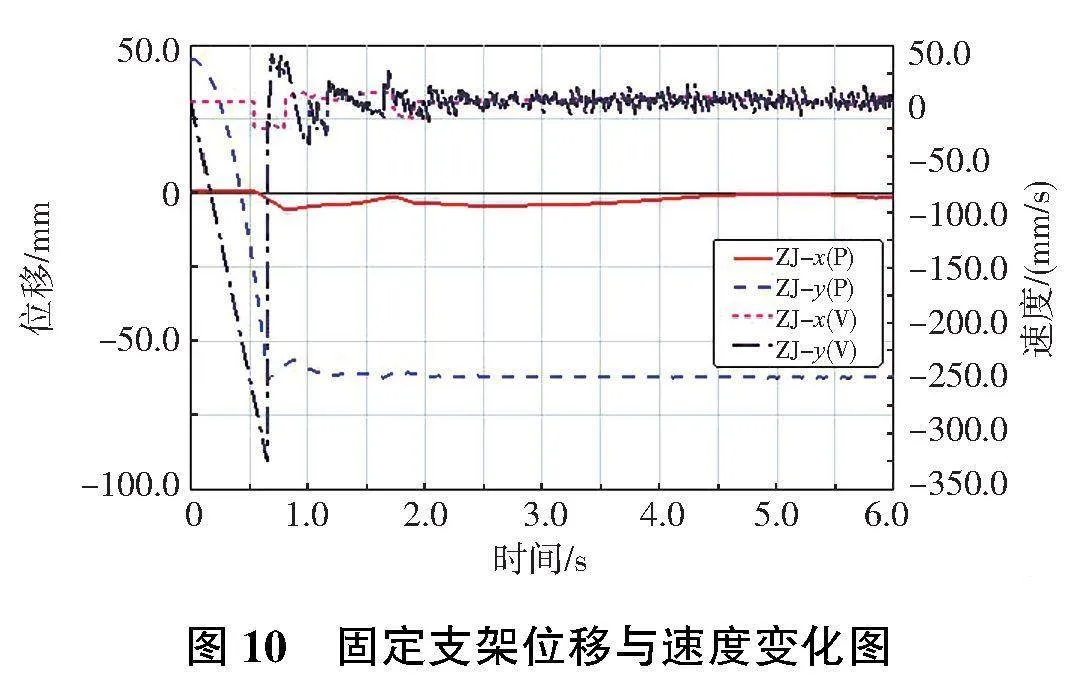
設定橫梁方向為z軸,豎直和水平方向為x軸和y軸,安全防護裝置的不穩定擺動主要體現在x軸和y軸。因此,整個仿真過程應重點關注安全防護裝置在下落至橫梁上后x軸和y軸方向的擺動位移和速度。經過仿真,得到自動固定機構支架和鎖扣在整個運行過程中x軸和y軸的位移與速度變化圖,如圖10和圖11所示。從圖中可以看出,在0.8s安全防護裝置下落至橫梁上,經過短暫的擺動后基本處于穩定,在3.5s鎖扣工作后整個安全防護裝置不再擺動。經過仿真表明,整個安全防護裝置結構設計合理,工作運行穩定可靠。
5 結語
在充分分析和調研現有檢修工人攀爬鐵塔檢修作業的現狀和詳細流程之后,明確了現有流程存在的主要安全隱患為牽引繩的懸掛。針對牽引繩的自主懸掛問題,結合無人機技術設計了一款輸電鐵塔高空作業安全防護裝置。重點對安全防護裝置的自動固定機構和釋放機構進行了詳細的結構設計,并對整體控制系統做了介紹。在考慮實際工況的情況下,對固定機構支架的可靠性進行了有限元分析,分析結果表明固定機構支架安全可靠,可承受3倍以上負載,并提出固定支架的優化方向。對釋放機構的失電型電磁鐵進行了選型,其負載大于安全防護裝置質量,結構大小適中,選型合理。最后利用ADAMS軟件搭建了安全防護裝置的虛擬樣機,并對其工作過程進行了仿真。結果表明:該安全防護裝置設計合理,運行可靠,為提高檢修人員的爬塔作業提供了可靠的安全防護,對進一步推動電力行業的發展具有積極意義。
參考文獻:
[1] 楊博,陳義軍,姚偉,等. 基于新一代人工智能技術的電力系統穩定評估與決策綜述[J]. 電力系統自動化,2022,46(22):200-223.
[2] 沈玉玲,呂燕,陳瑞峰. 基于大數據技術的電力用戶行為分析及應用現狀[J]. 電氣自動化,2016,38(3):50-52.
[3] 楊先明,袁欣悅. 西電東送的區域經濟增長效應[J]. 財經科學,2022(5):77-89.
[4] 崔粲. 無人機航拍在鐵路事故救援中應用思考[J]. 鐵路通信信號工程技術,2016,13(1):48-51.
[5] 李華鋒,趙康康. 多耦合失電型電磁制動器的設計[J]. 電子制作,2022,30(16):67-69,54.
[6] 葛男男,孫偉,曹界宇. 無人機實時圖像傳輸系統設計[J]. 中國新通信,2021,23(2):61-62.
[7] 賈文濤,李春濤. 無人機航跡優化與跟蹤技術研究[J]. 機械制造與自動化,2020,49(6):156-161.
[8] 李昀軒,魏雅君,倪博宇,等. 基于ANSYS與ADAMS的六軸機器人整機分析[J]. 機械設計,2020,37(12):13-17.