基于質控系統的無人攤碾施工技術及管理行為研究
2024-10-30 00:00:00李春宏
交通科技與管理 2024年19期

摘要 智能化施工是未來道路工程機械化發展的一個重要方向,該文結合2022年通啟高速G15段集中養護工程,對無人攤碾和信息化質控技術進行了系統研究。結果表明:無人攤碾施工技術能夠有效規避傳統人工作業及過程監管的局限性,攤碾過程采用的質控系統能夠快速將施工問題反饋至前后場,根據作業情況及時調整參數,能夠使施工過程更加穩定。攤鋪后鋪面檢測結果發現,無人化碾壓效果更優,滲水合格率達到100%,根據碾壓云圖可以看出,無人碾壓鋪面效果更加均勻。后續展望需進一步加強施工過程中的起步和結束階段無人化控制程度。
關鍵詞 道路工程;智能化施工;無人攤碾技術;質控系統;一體化管理
中圖分類號 U414 文獻標識碼 A 文章編號 2096-8949(2024)19-0090-03
0 引言
機械設備廣泛應用于瀝青路面攤鋪和碾壓施工中,在復雜工況下,人工使用機械設備很難實現協同調度一致,同時攤鋪速度、碾壓遍數由于人工作業誤差很難達到事先設置好的施工參數,作業質量和作業效率難以保障[1-3]。無人攤碾加質控系統技術是近年來高速公路施工作業向智能化、系統化、無人化發展的重要趨勢[4]。通過無人駕駛、協同調度、群控安全等關鍵技術,實現路面施工的智能作業與數字化管理,利用北斗定位系統、高速通信系統、避障感知系統等智能技術,讓無人機群能夠按照事先設置好的攤鋪速度、運行軌跡、碾壓速度與遍數協同作業[5-6],系統根據現場情況實時調整施工參數,在減少作業人員的同時,保證安全且高質量的路面攤鋪和碾壓作業,是公路工程建設安全、優質、高效的新突破[7-8]。
通啟高速公路是江蘇省規劃的“四縱四橫四聯”路網中“橫三”線和江北交通主骨架的重要組成部分,于2004年10月建成通車,始于寧通高速公路的九華互通立交,沿途經過通州區、港閘區、南通經濟技術開發區、海門市、啟東市五個市(區),止于啟東市匯龍鎮,全長107.63 km。該道路已通車18年,超過設計使用年限,路面情況復雜,且地理位置特殊,車流量巨大,在車輛荷載及環境因素的長期作用下,路面使用性能持續衰減。2022年7月,通啟高速公路G15段開始進行全面養護工作,該道路養護作業量大、養護質量要求高,且屬于主干線亟須盡快恢復通車,智能化養護施工改造需求迫切。基于此,該研究結合通啟高速公路路面大修養護工程,對無人攤碾結合質控系統動態把控攤碾質量技術進行了系統的研究與分析,以期為無人攤碾技術的進一步推廣應用奠定基礎。
1 無人攤碾施工的關鍵技術
1.1 基本原理及實施方法
無人化集群系統通過多種智能傳感方式實施監控并反饋路面的狀態,中央決策系統會根據路面攤鋪、壓實的情況實時調整無人化設備的工作方式和工作區域,從而實現施工過程監管和質量的把控。無人攤碾主要由三大部分組成,成套的無人化設備、無人化施工系統以及專業化的無人施工團隊。施工單位根據業主需求和設計圖紙制定前場施工方案,無人施工團隊對應調整施工參數并輸入無人機群控制系統,通過搭載的車載控制系統、集群交互算法以及北斗定位技術,實現無人化施工[9-11]。
1.2 施工設備
攤鋪機采用搭載質控數據采集系統的超大型攤鋪機,一次鋪筑半幅寬,避免出現傳統施工的縱向接縫問題且確保整幅橫坡一致。邊緣處設置0.75 m伸縮帶便于寬度調整,從機械結構上解決傳統雙機并鋪帶來的接縫質量問題。施工過程中,由于半幅攤鋪機螺旋布料器寬度以及料斗寬度較大,混合料與空氣接觸面大,導致攤鋪過程中溫度散失較為明顯,鋪面經常出現溫度離析現象,因此攤鋪需重點考慮保溫措施,確保攤鋪和壓實溫度。碾壓采用搭載質控數據采集系統的雙鋼輪壓路機,與市場常規產品對比,具有自重大、高頻的特點,能夠合理避開公路橋梁的共振頻率區間。同時采用壓路機研究所最新控制技術[12],對加速度曲線以及軟啟軟停技術進行優化,使瀝青路面的平整度參數得到了有效提高。
1.3 施工準備
為保證無人集群攤鋪施工順利進行,對各環節機械設備進行了檢查、檢修,具體措施如下:
(1)對石子、瀝青、纖維等原材料進行抽樣檢測,檢查結果合格;
(2)對拌和樓生產設備進行檢查、檢修,更換部分配件,抽調生產經驗豐富的人員負責混合料生產;
(3)對現場施工機械進行檢查,保證機械性能處于優良狀態;
(4)對混合料運輸車的保溫設施及車況進行檢查,對不符合要求的車輛進行專項整改;
(5)準備充足的配件,安排機務修理人員現場待命。
1.4 施工過程
全幅攤鋪機作為攤鋪第一梯隊首先進行踩點引導,攤鋪速度保持在2~3 m/min。在攤鋪機的熨平板兩邊裝有的衛星定位傳感器用于測定路面寬度中心位置點,為后續攤鋪確定和劃分碾壓寬度提供中心點參考,同時攤鋪機后面預留3~5 m的安全距離防止追尾。然后進行初壓,根據中心參考點和預設的攤鋪距離,以中線為界劃分為左右兩個碾壓區域。當區域人工施工間距達到35 m時,由兩臺雙鋼輪壓路機組成的第一碾壓梯隊開始對攤鋪過的瀝青路面進行從左往右(或者從右往左)碾壓。此外,首次碾壓時,雙鋼輪碾壓機需前進至攤鋪機后面5 m處,后退時需退回至壓實區的起始點。后續碾壓過程中,雙鋼輪碾壓機每次碾壓都需推進到攤鋪機后5 m處,并后退實現階梯式碾壓作業。
在碾壓過程中,第一碾壓梯隊的兩臺雙鋼輪壓路機在各自的區域需完成碾壓次數達到三次,且保證被碾壓過的區域長度達到預設距離。然后初壓梯隊進入下一個碾壓區域,同時第一區域由兩臺復壓雙鋼輪壓路機組成的第二碾壓梯隊開始從第一碾壓梯隊的初始位置進行碾壓,碾壓方式與第一梯隊相同,最后由一臺雙鋼輪壓路機組成的第三碾壓梯隊進行最終壓實。當復壓梯隊碾壓完兩個區域,進入第四區域時,終壓開始啟動,各梯隊碾壓過后軌跡示意圖如圖1所示。以同一區域為例初壓梯隊碾壓完成后,該區域由復壓梯隊繼續進行二次復壓,復壓過后該區域則由終壓梯隊進行第三輪終壓,同時確保復壓軌跡最后被終壓軌跡覆蓋。
2 基于質控系統的關鍵管控行為
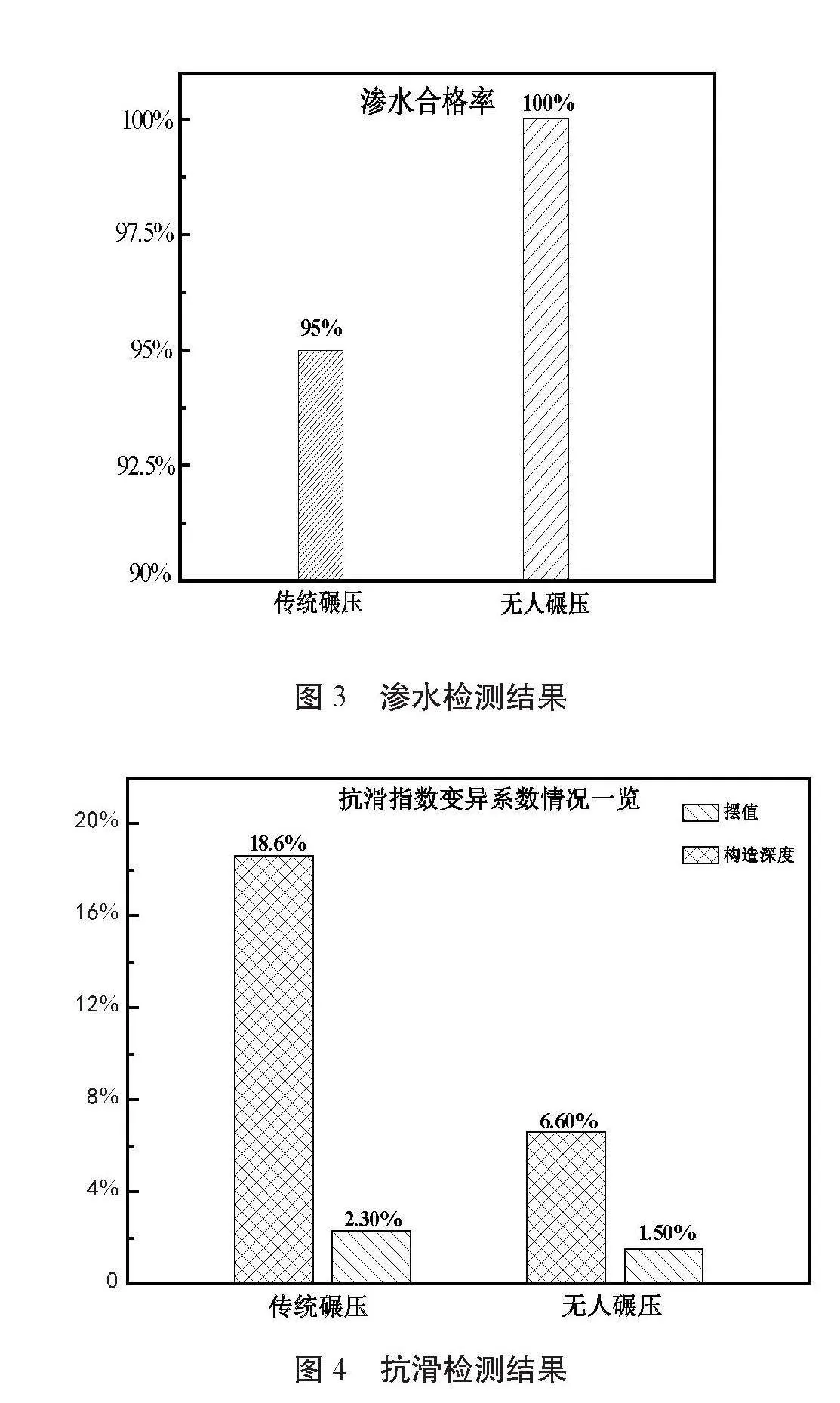
采用國內首創的“無人攤碾+質控系統”深度融合,通過質控系統一站式實時動態監管,如圖2所示。現場人員可通過現場問題及質控數據及時糾正前后場生產參數,針對后場拌和周期、集料級配、油石比、出場溫度以及前場攤鋪速度、攤鋪溫度、壓實速度、壓實溫度等全程采集,便于進行數據分析。傳統人工評價較為局限且僅能作為參考,無法全盤評價,而通過雙系統融合,能夠全過程實時了解施工動態,精準評價無人施工成效。
2.1 后場生產管控
針對后場拌和周期、集料級配、油石比、出場溫度進行實時監控,通過提前預警與現場工作人員聯動,及時調整生產參數。采用人工檢測+信息化監管手段進行數據統計,每臺拌和樓安排1名專人跟蹤生產情況。
2.2 前場施工管控
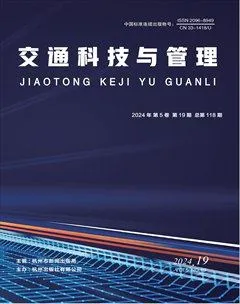
由于全幅攤鋪機溫度散失較快,因此無人碾壓將攤碾間距縮短至2 m,確保初壓快速跟進。通過搭載無人化控制系統,使碾壓更加均勻,大幅減少了相鄰作業面漏碾、重復碾壓以及超壓的現象,鋪面壓實效果大幅提升。通過碾壓云圖尋找碾壓薄弱位置,進行路面滲水、構造深度及擺值檢測,檢測結果如圖3、圖4所示。
根據圖3、圖4可得,傳統碾壓滲水檢測合格率平均為95%,無人化碾壓效果更優,合格率達到100%。無人碾壓鋪面效果也更加均勻,但仍需要加強起步、結束的無人化控制程度。
3 結語
結合通啟高速公路路面大修養護工程,對無人攤碾施工關鍵技術以及基于質控系統的關鍵管控行為進行了系統的研究與分析,得出相關結論如下:
(1)基于國內外無人化智能施工相關研究及實際應用,無人攤鋪和碾壓發展前景廣闊,通過無人攤碾技術的不斷推廣,使得傳統的集中養護變得更加便捷,由當前的勞動密集型、經驗型施工方式變成技術型、數據型作業模式。
(2)無人攤碾施工技術的推廣有利于實現集中養護從被動到主動,從粗放到精細,從單元到系統,從傳統到現代的技術升級改造。
(3)通過質控系統的過程管控發現了當前無人施工技術存在的不足,并對無人系統進行了優化,針對加強起步和結束的無人化程度控制,提出了真正適用于養護工程的智能化動態控制攤壓方案。
參考文獻
[1]董剛,劉義彬,鄭南翔.瀝青路面施工過程質量信息實時監控系統研究[J].公路交通科技,2015(11):28-40.
[2]司偉,茆緯杰,李寧,等.寒區瀝青路面智慧化施工混合料溫度預估機器學習模型[J].中國公路學報,2023(3):81-97.
[3]張靜曉,劉洋,楊琦.面向重大線性工程的施工道路沿線生態環境影響因素與綠化措施研究[J].中國公路學報,2023(5):231-243.
[4]雷彬.公路施工機械的合理組合及科學管理分析[J].交通科技與管理,2024(5):150-152.
[5]周南杰,顏俊鍵,李偉雄,等.基于三維探地雷達和數字圖像分析的瀝青路面施工質量評價研究[J].公路,2022(12):100-106.
[6]馬超.公路橋梁建設的質量問題及試驗檢測研究[J].交通科技與管理,2024(5):162-164.
[7]鄧俁粲.淺談柬埔寨3號公路升級與改造項目級配碎石施工及質量控制[J].交通科技與管理,2024(5):66-68.
[8]高新民,姜睿,邊慶華,等.溫拌瀝青混合料低溫環境施工溫度研究[J].公路,2021(12):17-22.
[9]司偉,王銳,張博文,等.瀝青路面施工工藝數字化信息特征[J].長安大學學報(自然科學版),2023(1):18-29.
[10]容毅,薛子濤,周國光.基于FCPA的智能精細化高精度地圖生成與車道級路網構建[J].長安大學學報(自然科學版),2023(3):105-115.
[11]金辰,曾孟源,吳荻非.基于振動傳遞的水泥混凝土路面接縫損傷感知[J].吉林大學學報(工學版),2023(6):1736-1745.
[12]馮太坤,楊光明,徐磊,等.基于3D機械控制瀝青路面智能攤鋪施工技術應用研究[J].運輸經理世界,2024(1):25-27.
收稿日期:2024-04-02
作者簡介:李春宏(1977—),男,本科,研究方向:路基路面建設與養護技術研究和應用。