基于衛(wèi)星圖像匹配的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法
2024-11-12 00:00:00宋夏楠宋慶敏王繼紅趙明舉鄧炬鑫
無線互聯(lián)科技 2024年19期
摘要:無人機(jī)降低飛行高度以節(jié)省時(shí)間或擴(kuò)展航程,會(huì)導(dǎo)致航片相幅減小、預(yù)測(cè)與真實(shí)位置重疊不足。為此,文章研究了基于衛(wèi)星圖像匹配的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法。首先獲取無人機(jī)相機(jī)姿態(tài)數(shù)據(jù),為后續(xù)處理提供基礎(chǔ);然后轉(zhuǎn)換三維目標(biāo)信息,提取三維目標(biāo)特征,深度分析無人機(jī)圖像;最后利用衛(wèi)星圖像匹配特征實(shí)現(xiàn)定位,精準(zhǔn)匹配無人機(jī)與衛(wèi)星圖像,實(shí)現(xiàn)自動(dòng)定位。實(shí)驗(yàn)證明,該方法定位性能優(yōu)于對(duì)比方法,具有較高的準(zhǔn)確性和穩(wěn)定性。
關(guān)鍵詞:衛(wèi)星圖像匹配;巡檢無人機(jī);地面三維目標(biāo);目標(biāo)定位;自動(dòng)定位
中圖分類號(hào):TP391.4 文獻(xiàn)標(biāo)志碼:A
0 引言
在復(fù)雜地形和廣闊區(qū)域的巡檢中,巡檢無人機(jī)的自主導(dǎo)航和精確定位至關(guān)重要。程擎等[1]利用卡爾曼濾波算法估計(jì)無人機(jī)狀態(tài),提高定位精度,但對(duì)模型準(zhǔn)確性要求高,偏差會(huì)導(dǎo)致軌跡偏差。徐卓君等[2]利用多無人機(jī)協(xié)同作戰(zhàn),快速搜尋和定位地面目標(biāo),但通信延遲或協(xié)同算法不優(yōu)可能導(dǎo)致軌跡偏差。本文研究了基于衛(wèi)星圖像匹配的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法,該技術(shù)精度高、覆蓋廣,彌補(bǔ)了GPS不足,通過匹配無人機(jī)捕獲與衛(wèi)星圖像,能實(shí)現(xiàn)精準(zhǔn)定位。本文的研究有望為無人機(jī)巡檢帶來革命性變革,推動(dòng)技術(shù)持續(xù)創(chuàng)新。
1 獲取無人機(jī)相機(jī)姿態(tài)數(shù)據(jù)
在巡檢無人機(jī)應(yīng)用中,獲取相機(jī)姿態(tài)數(shù)據(jù)是關(guān)鍵,能明確拍攝位置和朝向,進(jìn)而準(zhǔn)確分析處理圖像。
無人機(jī)與衛(wèi)星影像因成像原理、高度差異導(dǎo)致分辨率不同,影像信息更詳細(xì)豐富[3],衛(wèi)星影像能提供大尺度地理信息和全局視野。處理時(shí)須匹配校準(zhǔn),明確地面分辨率計(jì)算公式及尺度縮放系數(shù)方法[4]。無人機(jī)航拍圖像的地面分辨率通常與飛行高度h、像元尺寸a和鏡頭焦距f有關(guān)。其計(jì)算公式如(1)所示。
v0=h×af(1)
無人機(jī)航拍圖像通過圖像重采樣或插值算法可以表示為:
I^=I×v02zd(2)
其中,v0為無人機(jī)航拍圖像的地面分辨率,單位是m/pixel。對(duì)于特定的衛(wèi)星地圖服務(wù),其計(jì)算公式可能是基于2的冪次關(guān)系。Z為衛(wèi)星圖像的地面分辨率,通常與衛(wèi)星地圖的級(jí)別相關(guān);d為地球赤道周長。經(jīng)尺度縮放后,無人機(jī)航拍圖像通過圖像重采樣或插值算法得到[5],為后續(xù)巡檢任務(wù)提供準(zhǔn)確可靠的地理信息支持。
2 轉(zhuǎn)換地面三維目標(biāo)數(shù)據(jù)
因各無人機(jī)攝像機(jī)角度不同,目標(biāo)坐標(biāo)在各像元坐標(biāo)系中各異。每架無人機(jī)從同一起飛點(diǎn)出發(fā),建立統(tǒng)一的世界坐標(biāo)系統(tǒng),不受無人機(jī)視角影響。
坐標(biāo)在像素坐標(biāo)系與圖像坐標(biāo)系之間的轉(zhuǎn)換過程為:用齊次坐標(biāo)(Wx,Wy,Wz,W)來表達(dá)三維空間(x,y,z)的坐標(biāo)。轉(zhuǎn)換公式如(3)所示。
x=WxW,y=WyW,z=WzW(3)
因此,無人機(jī)坐標(biāo)系中的目標(biāo)位置點(diǎn)的直角坐標(biāo)如(4)所示。
A=[Ax,Ay,Az,1]T(4)
其中,Ax、Ay、Az為目標(biāo)在無人機(jī)坐標(biāo)系的位置。在不存在三向位姿的情況下,無人機(jī)坐標(biāo)系與無人機(jī)航跡坐標(biāo)系重合。在此基礎(chǔ)上,綜合考慮機(jī)身3個(gè)方向的姿態(tài)(偏航M1、俯仰M2、橫滾M3),在無人飛行器坐標(biāo)系中,目標(biāo)的位置坐標(biāo)為:
B=M1·M2·M3·A(5)
從公式(5)可以得到物體的世界坐標(biāo)。最終,地面平臺(tái)將目標(biāo)的全局坐標(biāo)、目標(biāo)類別以及目標(biāo)特性等信息與其他無人機(jī)共享。
3 提取巡檢無人機(jī)地面三維目標(biāo)特征
首先須確定參考區(qū)域:
r=R(x,βUh+a,βUw+b)(6)
式中,R為參照衛(wèi)星影像;x為基準(zhǔn)衛(wèi)星圖像中攝像機(jī)在計(jì)算之后的像素位置;β為比例系數(shù);Uh為空中影像的高度;Uw為空中影像的寬度;a、b是閾值。針對(duì)特定的二值圖,利用它來表達(dá)目標(biāo)物體的分布特性信息,即:
E=β[q11′,q22′,…,qnn′]T(7)
特征提取主要由對(duì)目標(biāo)物體的分布特性信息上的關(guān)鍵點(diǎn)進(jìn)行檢測(cè)。計(jì)算公式如下:
H(x,β)=E·Yxx(x,β)Yxy(x,β)
Yxy(x,β)Yyy(x,β)(8)
其中,Yxx(x,β)為這一點(diǎn)的二次高斯卷積微分。在此基礎(chǔ)上,對(duì)關(guān)鍵點(diǎn)附近的哈爾波小波響應(yīng)進(jìn)行分析,得到關(guān)鍵點(diǎn)的主要方位,并構(gòu)建相應(yīng)的特征矢量完成提取。
在巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位中,該算法的應(yīng)用將有助于提高目標(biāo)識(shí)別的準(zhǔn)確性和定位的實(shí)時(shí)性,為巡檢任務(wù)的順利完成提供有力支持。
4 利用衛(wèi)星圖像匹配特征實(shí)現(xiàn)定位
利用衛(wèi)星圖像匹配特征實(shí)現(xiàn)定位,結(jié)合無人機(jī)與衛(wèi)星平臺(tái)優(yōu)勢(shì),實(shí)現(xiàn)高精度自主定位。衛(wèi)星圖像匹配技術(shù)起關(guān)鍵作用,對(duì)噪點(diǎn)和圖像變換具魯棒性。每個(gè)提取的特征點(diǎn),通過比較周圍像素亮度差異生成二進(jìn)制字符串。對(duì)于特征點(diǎn)p,在其周圍選取n對(duì)像素點(diǎn)(xi,yi)和(xj,yj),計(jì)算這些像素點(diǎn)對(duì)的亮度差異并進(jìn)行二值化處理:
τ(p;xi,yi;xj,yj)=1ifI(xi,yi)>I(xj,yj)
0其他(9)
其中,I(xi,yi)和I(xj,yj)分別為像素點(diǎn)(xi,yi)和(xj,yj)的亮度。二值化處理后,針對(duì)某一特定的無人機(jī)航拍影像,尋找與該特征點(diǎn)之間的最接近點(diǎn),通過對(duì)特征點(diǎn)間的距離進(jìn)行對(duì)比,找出最優(yōu)匹配點(diǎn)。
5 實(shí)驗(yàn)
5.1 實(shí)驗(yàn)準(zhǔn)備
本文依托EOSAT平臺(tái),獲取某市公園衛(wèi)星圖像資料作為無人機(jī)航拍基礎(chǔ)數(shù)據(jù)。為增強(qiáng)數(shù)據(jù)集多樣性,采用加噪聲、調(diào)對(duì)比度、水平翻轉(zhuǎn)等手段,每類樣本增至500張,構(gòu)建含672000張圖片、1344類區(qū)域的數(shù)據(jù)集。按8∶1∶1劃分訓(xùn)練、驗(yàn)證、測(cè)試集,確保訓(xùn)練有效、評(píng)估公正。
為了進(jìn)一步驗(yàn)證文中匹配方法的有效性,使用交并比RIoU作為客觀評(píng)價(jià)指標(biāo),對(duì)匹配結(jié)果進(jìn)行評(píng)價(jià)。
RIoU=Be∩BtBe∪Bt(10)
式中,Be為預(yù)測(cè)的矩形框面積;Bt為地面真實(shí)的矩形框面積。其值越大,表明真實(shí)值與測(cè)試值越接近,從而得到的圖像匹配效果也更好。
5.2 試驗(yàn)結(jié)果與分析
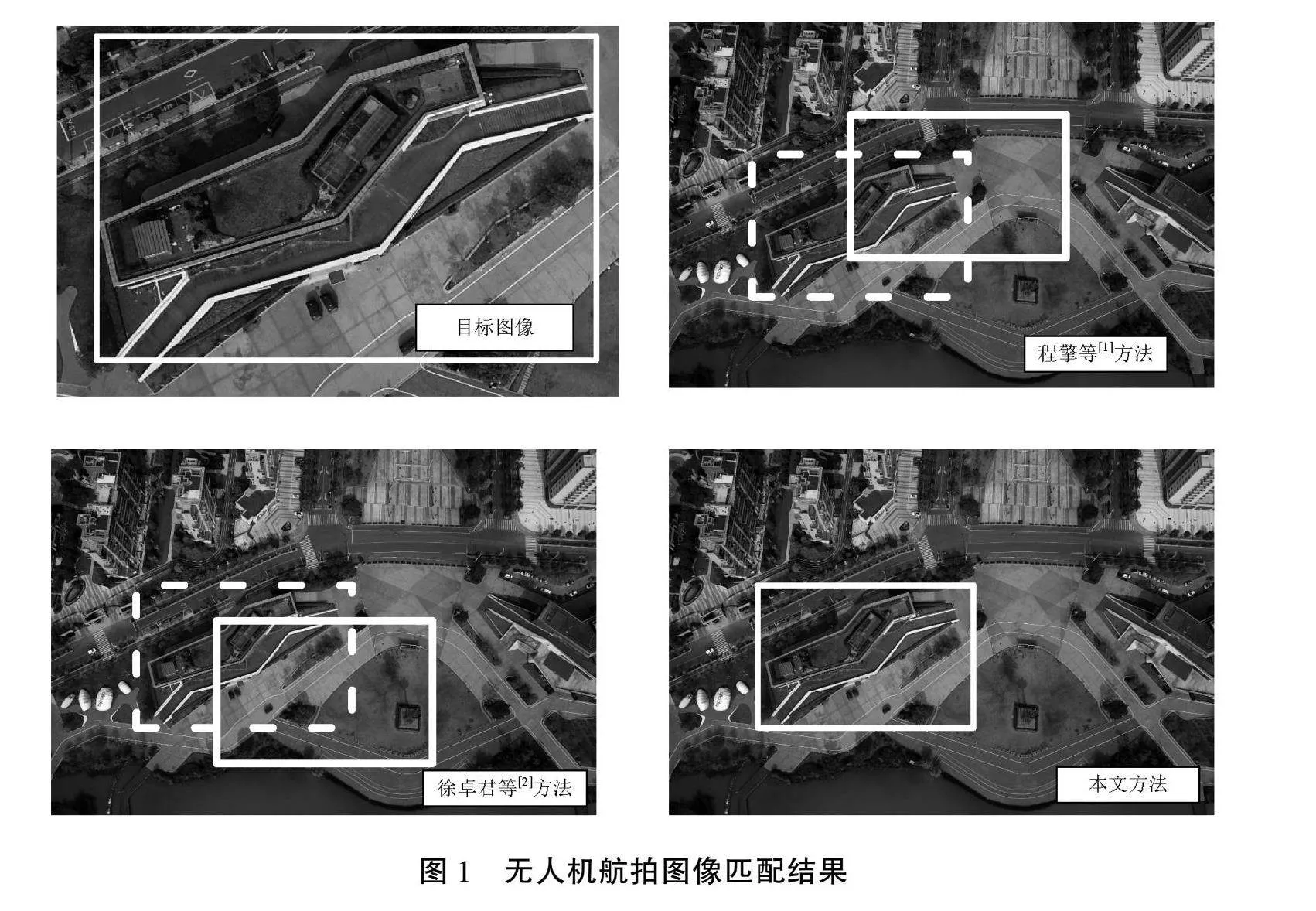
基于圖像的地面真實(shí)位置和預(yù)測(cè)位置之間的重疊率作為試驗(yàn)評(píng)估指標(biāo),對(duì)本文提出的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法、程擎等[1]方法以及徐卓君等[2]方法進(jìn)行試驗(yàn)分析。
圖1中,程擎等[1]和徐卓君等[2]方法圖的實(shí)線矩形為每個(gè)方法的預(yù)測(cè)位置,虛線矩形為地面真實(shí)位置。可以看出,本文方法的匹配結(jié)果與地面真實(shí)位置最接近,明顯要優(yōu)于其他2種方法。統(tǒng)計(jì)所有圖像的定位重疊率,可知:本文方法、程擎等[1]方法、徐卓君等[2]方法的平均重疊率分別為92.3%、85.7%、80.1%;3種方法的標(biāo)準(zhǔn)差分別為2.1%、3.2%、3.8%。這表明本文方法在定位性能上更優(yōu),且標(biāo)準(zhǔn)差低,證明了其穩(wěn)定性和可靠性。綜上所述,本文提出的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法重疊率高,定位準(zhǔn)確且穩(wěn)定,為實(shí)際應(yīng)用提供了有力支持。
6 結(jié)語
本文研究的基于衛(wèi)星圖像匹配的巡檢無人機(jī)地面三維目標(biāo)自動(dòng)定位方法,能精準(zhǔn)匹配衛(wèi)星圖像,迅速識(shí)別并定位地面目標(biāo),降低人工干預(yù)需求,提高巡檢自動(dòng)化水平。然而,該方法受天氣、云層等自然因素影響,圖像質(zhì)量下降會(huì)影響匹配準(zhǔn)確性,但其發(fā)展?jié)摿薮蟆kS著遙感技術(shù)的進(jìn)步和衛(wèi)星圖像分辨率的提高,期待更精準(zhǔn)高效的定位方法出現(xiàn)。綜上,本文方法雖有不足,但效果和潛力令人矚目,期待未來能得到更完善的發(fā)展,為無人機(jī)巡檢領(lǐng)域帶來創(chuàng)新與突破。
參考文獻(xiàn)
[1]程擎,李怡恒,魯合德.基于擴(kuò)展卡爾曼濾波的無人機(jī)輔助定位研究[J].電光與控制,2023(12):93-97,103.
[2]徐卓君,王耀祥,黃興,等.多無人機(jī)地面移動(dòng)目標(biāo)搜尋和定位[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2023(3):832-840.
[3]王騫仟,熊源,姜涵,等.支持場景表觀差異的無人機(jī)圖像視覺定位方法[J].空間控制技術(shù)與應(yīng)用,2024(1):56-67.
[4]任艷,劉勝男,陳新禹,等.不同季節(jié)下無人機(jī)航拍圖像與衛(wèi)星圖像匹配方法研究[J].彈箭與制導(dǎo)學(xué)報(bào),2023(5):16-24.
[5]曹子龍,童小華,許雄,等.基于空地影像多層級(jí)匹配的火星巡視器定位與地面驗(yàn)證[J].測(cè)繪學(xué)報(bào),2023(4):579-587.
(編輯 沈 強(qiáng))
Automatic positioning method of UAV ground based on satellite image matching
SONG Xianan, SONG Qingmin, WANG Jihong*, ZHAO Mingju, DENG Juxin
(College of Electronic and Electrical Engineering,Zhengzhou University of Science and Technology, Zhengzhou 450064, China)
Abstract: The UAV reduces the flight altitude to save time or expand the range, resulting in the decrease of the aerial phase amplitude and insufficient predicted overlap with the real position. To this end, this paper studies the automatic 3 d target positioning method of inspection UAV based on satellite image matching. Firstly, UAV camera attitude data is acquired to provide the basis for subsequent processing; then convert 3 D target information, extract 3D target features and deeply analyze UAV images; finally, use satellite images to match the UAV and satellite images to achieve automatic positioning. The experiments show that the localization method is better than the comparison method and has high accuracy and stability.
Key words: satellite image matching; UAV inspection; ground 3D target; target positioning; automatic positioning

- 無線互聯(lián)科技的其它文章
- “金課”視域下指向深度學(xué)習(xí)的智慧課堂教學(xué)模式設(shè)計(jì)
- 物聯(lián)網(wǎng)技術(shù)協(xié)議應(yīng)用展望
- 基于區(qū)塊鏈的云存儲(chǔ)數(shù)據(jù)安全訪問控制方法
- 基于區(qū)塊鏈技術(shù)的卷煙廠生產(chǎn)大數(shù)據(jù)網(wǎng)絡(luò)入侵檢測(cè)方法
- 公共圖書館網(wǎng)絡(luò)安防現(xiàn)狀與優(yōu)化策略分析
- 基于區(qū)塊鏈技術(shù)的工業(yè)物聯(lián)網(wǎng)數(shù)據(jù)安全架構(gòu)研究