基于DCS的壓縮機余隙調節控制系統設計
2024-11-12 00:00:00李忠博
無線互聯科技 2024年19期


摘要:針對石油化工行業中往復式壓縮機無級氣量調節的需求,文章分析了壓縮機余隙調節系統的工作原理,介紹了基于DCS的余隙控制系統的硬件結構形式和軟件設計方法,利用DeltaV系統的AI卡件采集余隙活塞位移、油箱液位、油溫、油壓等信號,將位移信號換算后與流量設定值進行比較,并運用PID控制原理遠程控制液壓系統,調節余隙活塞位移,實現了壓縮機氣量無級調節。該控制系統結構形式簡單,運行穩定,達到了節能減耗的目的。
關鍵詞:DCS;壓縮機;余隙調節;液壓控制;節能
中圖分類號:TP273 文獻標志碼:A
0 引言
往復式壓縮機是一種通過壓縮氣體介質提高介質壓力的通用化工機械設備,屬于容積式壓縮機,具有排氣壓力高且穩定的特點,廣泛應用于石油化工行業[1]。在石油化工生產單元中,由工藝人員提出生產單元的滿負荷流量,依此得出壓縮機的排氣量大小,并且通常保留一定的空余量。然而在生產過程中,往復式壓縮機的排氣量可能會長期低于設計值,并且在生產過程中工藝條件(如入口壓力、溫度等)及原料成分等均會發生變化。因此,工藝人員須要根據實際工況調節壓縮機排氣量,保證壓縮機和生產裝置的平穩運行[2]。往復式壓縮機氣量調節方式一般分為3種,分別是旁路調節、HydroCOM無級氣量調節和可變余隙容積調節[3-5]。其中,旁路調節應用比較廣泛,但是這種方式是將壓縮后的氣體經旁路返回壓縮機進氣腔,造成了壓縮機功率的浪費并且增加了壓縮機的機械磨損。HydroCOM無級氣量調節方法是在壓縮機工作過程中,控制系統根據耗氣量的變化精確計算進氣閥開啟與關閉的時間,使進氣閥延遲一定時間關閉,這樣,氣缸中的一部分氣體不經過壓縮直接返回進氣管,壓縮機只壓縮設定流量的氣體。這種控制方案節能效果顯著,但是該方案的控制系統結構復雜,需要增加氣閥執行機構并且對氣閥等關鍵部件質量要求極高,投資較大。可變余隙容積調節方案是在壓縮機氣缸外側加裝與其直接連通的可變余隙腔,通過調節余隙腔的大小,壓縮機就能夠根據設定負荷吸入相應流量的氣體,然后全部壓縮。在這種控制方案中,壓縮機沒有將多余的氣體進行壓縮,控制系統也不必精確控制氣閥的開閉時間。在把壓縮機原有的缸蓋替換為帶有余隙腔、余隙活塞和液壓缸的執行機構之后,工藝人員通過DCS遠程控制液壓系統改變余隙活塞的位移,就可在一定范圍內實現無級氣量調節。從降低氣缸溫度等方面考慮,壓縮機一般在60%~100%負荷連續調節,因此,這種方案得到了廣泛應用[6]。
DeltaV系統是由Emerson公司開發的具備良好的人機交互、完備的通信和控制功能的工業自動化系統。它具有控制系統典型的三層網絡通信結構,并支持廣泛的通信協議標準,可以與各類現場儀表設備、控制系統進行實時通信。因此,DeltaV系統成為石化企業關鍵裝置控制系統的主要選擇[7-8]。
某石化公司氫氣回收項目的35000 Nm3/h制氫裝置,需要對其原料氣壓縮機K-701進行節能設計改造,以實現壓縮機無級氣量調節,達到降低裝置能耗,提升裝置運行可靠性的效果。為了實現此目的,本文提出了采用艾默生公司的DeltaV控制系統,實現遠程控制余隙液壓系統,利用AI卡件采集液壓系統液位、油溫、油壓、泄漏壓力以及余隙活塞位移信號,將換算后的位移信號與壓縮機流量設定值比較,運用PID控制原理控制液壓系統電磁換向閥的開啟和關閉,調節余隙活塞位移,實現壓縮機無級氣量調節。
1 余隙調節系統總體方案
系統機械部分采用九江大安公司的ASSV1.0余隙系統,該系統主要包括4個子系統,分別是壓縮機無級氣量調節余隙缸機械系統、動力油運行控制子系統、供電子系統和儀表控制子系統。其中,余隙缸的位移信號采用LVDT位移傳感器進行測量,控制執行單元為24 V驅動電磁閥電磁組,控制信號為24 V有源接點信號,調節機構為液壓油缸活塞,被控對象為壓縮機余隙缸。余隙調節裝置液壓結構如圖1所示。
壓縮機余隙調節系統組成部件包括余隙調節缸、液壓油缸、三位四通控制電磁閥、余隙活塞、油箱、油泵電機機組及位移傳感器等部分。系統的工作原理為:油箱存儲動力液壓油液位指標控制在80%~100%,為液壓系統提供動力介質;電機D驅動壓力油泵將油箱中動力油的常壓提高為工作壓力,工作壓力范圍控制在8~10 MPa,升壓后的動力油可以克服液壓缸活塞運動過程中的負載阻力和摩擦阻力,為系統工作提供液壓能源。動力油壓的控制方案為:當油壓低于下限設定值時,油泵啟動,直到高于上限設定值時停止;當出現液位低、過載、嚴重泄漏(泄漏壓力超過極限值)故障時,油泵停止;油泵啟動后開始計時,當時間超過上限,油壓仍未達到上限設定值或者單位時間內油壓上升速度未達到設置值,則判斷液壓系統或油泵可能有問題,DCS會產生報警提示并立即停泵。系統動力油受控制信號作用的電磁閥調節,改變流通方向,當儀表室遙控操作時,電磁閥兩端的電磁鐵根據控制信號的指令上電、斷電,高壓油進入導通的液壓缸一側,液壓缸另一側內的液壓油從腔內流回油箱,從而實現改變油液的流向,達到控制余隙活塞位移、改變余隙腔容積、無級調節氣量的效果。此外,液壓油路系統還配備了溢流裝置,溢流閥動作的設定值一般設為工作壓力范圍最大值的1.2倍,如果油路系統出現堵塞、油泵工作異常等故障導致油壓過高,高壓油會直接從溢流閥流回油箱,保護油路系統安全。該制氫裝置K701壓縮機氣量負荷調節范圍是60%~100%,壓縮機排氣量與余隙缸容積近似成正比,即傳感器位移與壓縮機排氣量基本呈線性關系,因此,位移傳感器的最小值和最大值分別對應負荷的60%和100%。另外,在控制過程中出現設定時間內控制信號與反饋信號出現偏差過大、位移傳感器出現故障導致反饋信號丟失、控制信號出現故障丟失等故障情況時,電磁換向閥組應失電,使油路立即截止,余隙活塞保持當前時刻位置。
2 余隙調節控制系統設計
2.1 硬件實現
DCS控制系統采用Emerson公司的DeltaV系統,系統具備友好的人機界面、完備的控制網絡結構和強大的數據通信能力,特別適合大中型石化企業的生產過程自動控制[9]。
某石化公司氫氣回收項目中35000 Nm3/h制氫裝置的DCS系統現狀為DCS控制器、卡件和現場儀表設備由同一組供電電源提供,未實現系統供電與現場供電互相獨立的供電原則,這種同一組電源供電方式容易導致電源共因失效故障,即現場側供電故障時DCS系統會發生供電失效。由于現場側供電故障發生概率較高,一旦發生這種故障,會影響整個裝置的正常運行,造成嚴重的經濟損失,甚至發生安全事故。因此,對供電模式的改造是十分必要的。本文方案將徹底改造原來的非獨立供電模式,在硬件設計安裝過程中,對系統供電與現場供電實現獨立冗余配置。即將電源模塊1和電源模塊2配置為系統供電模塊,為DCS控制器和I/O卡件進行供電,實現冗余配置;將電源模塊3和電源模塊4配置為現場儀表、隔離繼電器等設備供電,也配置為冗余供電模式。
系統供電部分配置完成后,進行I/O卡件及通道的配置。系統的I/O測點如下。
(1)模擬量輸入信號(AI):包括系統油壓信號、泄漏壓力信號、余隙活塞位移信號、油箱液位信號、油溫信號。
(2)開關量輸出信號(DO):包括位置控制電磁閥(雙頭)、油泵啟動信號、油泵停止信號。
根據系統的測點需求,壓縮機余隙調節控制系統需要配置AI卡件和DO卡件。為了保證裝置的可靠運行,將AI卡件和DO卡件均配置為冗余卡件。其中,現場的模擬量輸入信號分為2種,一種是兩線制4~20 mA無源標準電流信號輸入,例如系統油壓力變送器、油箱液位變送器;另一種是三線制4~20 mA現場有源標準電流信號輸入,例如LVDT余隙活塞位移傳感器。現場儀表測量信號進入控制室后,經過安全柵進行信號隔離后,進入DCS系統的AI卡件相應的通道,DCS的I/O處理單元經過A/D轉換將模擬信號進行數字轉換送至控制器,控制器經過控制邏輯分析計算后,將控制輸出信號經DO卡件輸出至現場執行機構。同時,控制器內的數據通過冗余交換機進行實時通信,將現場數據顯示在操作站上,供操作人員監視和控制生產過程。
本文系統采用的AI卡件是8通道冗余模擬量輸入模塊,DO卡件為32通道開關量輸出模塊。控制系統結構如圖2所示。
2.2 軟件實現
DeltaV系統軟件可分為系統組態軟件和實時監控軟件2部分,控制方案及硬件的組態須要在組態軟件中完成。系統硬件組態要與實際硬件配置相一致,否則會出現組態報錯。然后要進行通道的組態,通道組態需要與現場儀表的接線情況相一致。硬件組態完成后,須要完成控制邏輯的組態。為了實現壓縮機余隙調節自動控制,須要完成DCS系統操作權限的配置。本系統設置了3種操作權限,分別為普通操作員、班長、工程師,其中工程師具有修改控制參數的權限。
余隙調節控制系統可以選擇遠程或本地控制模式,當處于遠程模式時,該系統由DCS遠程控制,操作員可以在DCS畫面上設定壓縮機負荷,則控制系統根據設定值自動調節余隙活塞位移,從而改變壓縮機負荷;當處于本地模式時,DCS指令失效,即電磁換向閥的線圈均不帶電,由現場手動控制。
位移傳感器測量的是余隙活塞的位移,其與壓縮機負荷基本呈線性關系,裝置負荷調節范圍是60%~100%,位移傳感器的最小值和最大值分別對應負荷的60%和100%,須要在DCS中進行設定值的量程轉換。
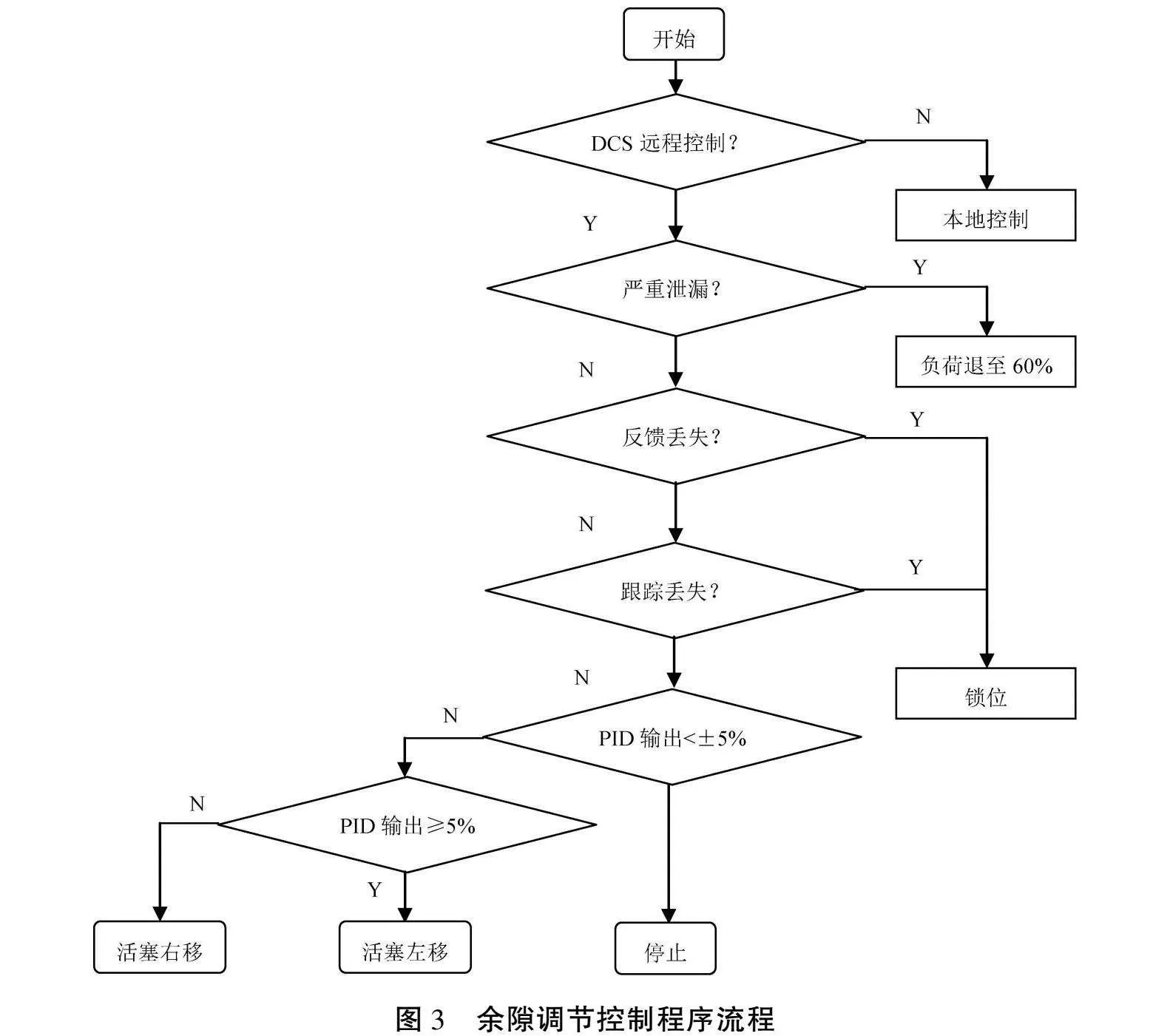
由于該控制系統的控制負載為電磁換向閥,控制信號是24 V有源接點信號,而不是類似于伺服閥等用4~20 mA模擬信號進行控制,因此,采取如下控制方案:將DeltaV系統的PID控制模塊輸出引腳out由默認的“0~100%”改為“-100%~+100%”,當控制器的輸出大于0時,令電磁換向閥的左側線圈上電,即相應的DO通道輸出“1”,則右側液壓缸的油壓增大,余隙活塞向左移動,壓縮機負荷增大;反之,當控制器的輸出小于0時,余隙活塞向右移動,壓縮機負荷減小。在系統調試過程中發現,由于系統存在滯后,余隙活塞運行不穩定,一直在設定值附近小幅震蕩,經反復調試后,采取了以下方法使余隙活塞快速并穩定地控制到設定位置:將DCS默認的掃描周期5 s改為1 s,以減小系統滯后時間;設置控制死區為PID輸出的±5%,即當PID的輸出在±5%以內時認為精度達到要求,此時電磁換向閥的2個線圈均不帶電;整定P、I參數,使余隙活塞快速、穩定地達到設定值。
為了避免儀表或液壓系統故障,當電磁換向閥的2個線圈均不帶電時,電磁換向閥的液壓油路均不導通,即可認為是鎖位狀態。當出現以下情況時,需要余隙調節系統鎖位:反饋丟失,即位移信號小于3.8 mA;跟蹤失調,即在大于一定誤差范圍(如1%)時,根據位移傳感器計算負荷速度(單位時間的位移量),當速度方向和目標方向相反時或速度為0時(靜止),判定為跟蹤失調;信號丟失,即DCS輸出到現場換向電磁閥的控制信號小于20 V時。
當液壓系統嚴重泄漏時,油泵停止,負荷退至最小值60%。
余隙調節控制程序流程如圖3所示。
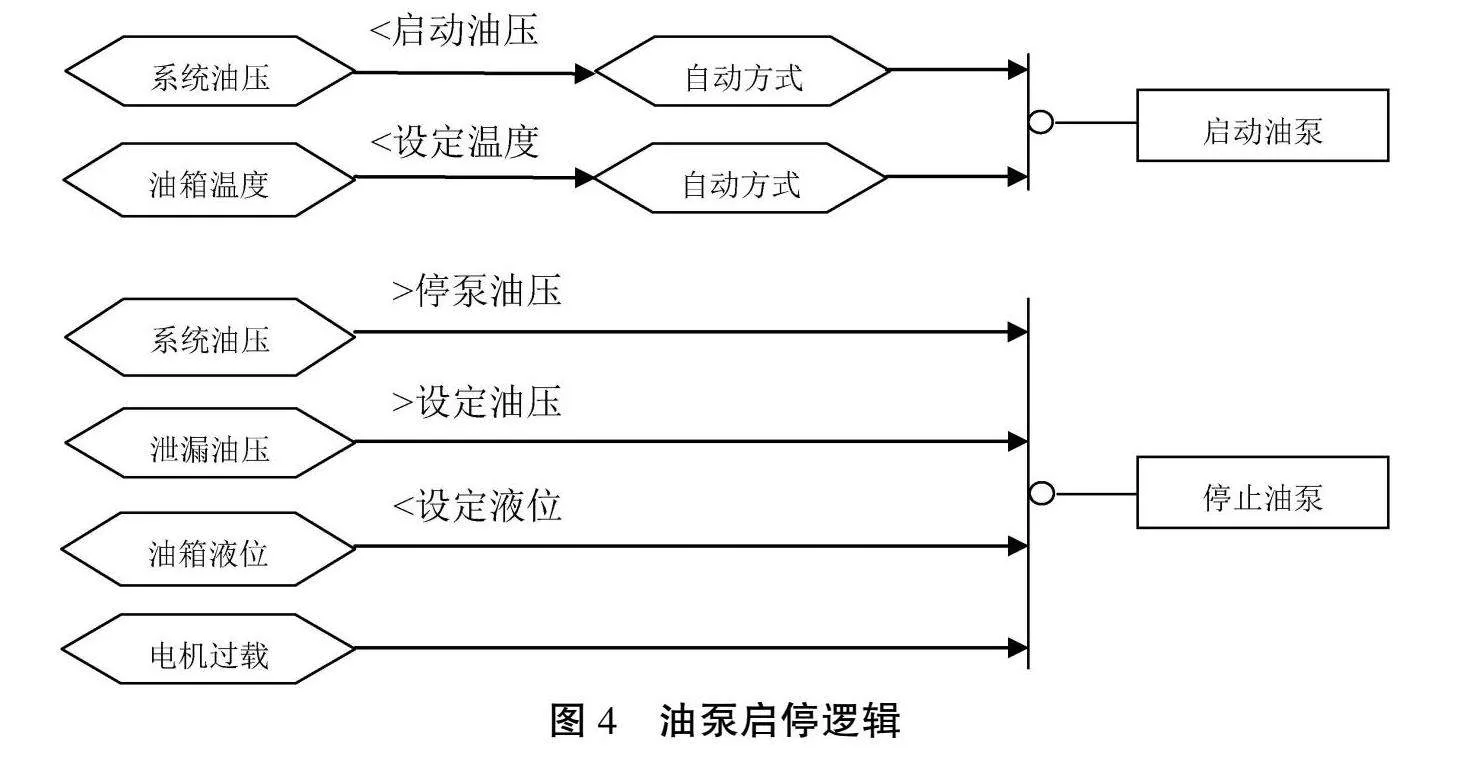
油泵控制方案:液壓油泵有手動和自動2種控制模式。當處于手動模式時,需要操作人員到現場電氣操作柱進行啟動和停止油泵。當處于自動模式時,滿足下列條件之一,啟動油泵:系統油壓低于啟動油壓,油箱溫度低于設定溫度。滿足下列條件之一,停止油泵:系統油壓高于停泵油壓,嚴重泄漏報警,油箱液位低,電機過載。油泵啟停邏輯如圖4所示。
過程報警設計方案:在DCS中對余隙調節控制系統可設置報警信息,以在系統出現故障時及時報警并進行檢查維修。在DCS中分別設定了油缸鎖位報警、液壓系統嚴重泄漏報警、油箱液位低報警、油箱溫度高報警、泄漏壓力變送器開路報警、油泵過載報警、油壓減壓時間過長報警、油箱溫度低報警。通過采集系統報警可以幫助技術人員及時發現生產操作中出現的問題并加以控制。DCS系統報警不僅包括生產過程報警,還包括系統自身報警,如硬件故障、信號開路等設備故障。報警信息會保存在DCS歷史數據庫中,同時還保存了各個數據點的實時和歷史趨勢,通過查看歷史趨勢曲線,可以分析裝置工藝設備參數運行情況。
監控畫面設計方案:本文設計的余隙調節控制系統監控程序能夠實現在線監控,包括DCS系統中各類信號的測量值和設定值、數據的實時趨勢和歷史趨勢、控制器內部和外部設定值、控制回路投用狀態等。在實時監控畫面中,可以實時顯示余隙腔位移、液壓系統壓力、系統泄漏壓力、油箱溫度、油箱液位、油泵運行狀態等物理量。通過點擊按鈕來完成監控畫面的轉換和邏輯方案的切換。
在監控畫面中可以通過按鈕勾選進行余隙調節系統和余隙電機的手/自動控制2種模式切換。當余隙調節系統處于手動模式時,操作人員需要根據裝置負荷手動控制換向電磁閥的上、下電;當余隙調節系統處于自動模式時,操作人員僅需輸入壓縮機負荷設定值,系統會根據壓縮機負荷設定值自動調整余隙腔位移,并顯示各監控變量報警信息。當余隙調節油泵處于手動狀態時,油泵的啟停只能由現場的操作柱進行控制,無法實現系統油壓的自動控制,需要耗費大量的人力成本;當余隙調節油泵處于自動狀態時,油泵的啟停會根據系統油壓自動進行,極大地減小了人力成本,提高了系統運行的可靠性和經濟效益。往復式壓縮機余隙調節控制系統可以根據裝置實際需求的氣量大小實現壓縮機排氣量的自動調節,從節能效果來看,減少了能源浪費。
3 結語
(1)系統采用Emerson公司的DeltaV DCS控制系統,利用冗余控制器、AI及DO卡件對余隙調節系統信號進行測量,對電磁換向閥和余隙油泵進行控制,
實現了往復式壓縮機氣量無級調節功能。系統硬件結構形式簡單、編程調試方便,運行可靠性高。
(2)設計方案成功應用在某石化公司氫氣回收裝置K701往復式原料氣壓縮機,實現了氣量60%~100%無級調節,改善了壓縮機的操作難度,壓縮機啟動、加減負荷、切機和停機過程平穩,系統工藝參數更加穩定,且能長期穩定運行,節能效果顯著。
參考文獻
[1]顧興坤,曲延鵬,劉燕.往復活塞式壓縮機余隙無級調節氣量節能技術的應用進展[J].壓縮機技術,2022(1):54-59.
[2]王建锃.基于往復式壓縮機節能操作的技術研究[J].石油和化工設備,2023(6):39-41.
[3]許勝軍,商寶光,宋德超,等.余隙無級調節氣量節能技術在循環氫壓縮機上的應用探討[J].石化技術,2022(6):222-224,235.
[4]盧江波,馮坤,李永清.往復式壓縮機氣量無級調節技術研究[J].石油化工自動化,2023(1):23-27,43.
[5]程熠詩.往復壓縮機增設余隙調節優化改造[J].設備管理與維修,2023(11):90-92.
[6]班輝,陳祥,李韶華,等.HydroCOM氣量無級調節系統在催化劑再生循環氣體節能增效中的應用[J].石油石化節能,2023(10):6-11.
[7]孫澤.火電廠(脫硫脫硝)DCS控制系統現場調試[J].無線互聯科技,2022(18):166-168.
[8]楊耿濤.火電廠電氣自動化控制系統設計[J].無線互聯科技,2023(17):35-38.
[9]王付軍,宋妮俐,楊長青.基于Modbus RTU協議的DeltaV系統與西門子S7-200 SMART PLC串行通信[J].工業控制計算機,2023(8):38-39.
(編輯 沈 強)
Design of compressor clearance adjustment control system based on DCS
LI Zhongbo
(Liaoning Petrochemical College, Jinzhou 121001, China)
Abstract: Aiming at the requirement of stepless capacity control of reciprocating compressor in petrochemical industry, the working principle of compressor clearance regulation system is analyzed. The hardware structure and software design method of clearance control system based on DCS are introduced. The displacement of clearance piston, oil tank level, oil temperature and oil pressure are collected by AI card of DeltaV system. The displacement signal is compared with the flow setting value after conversion. The PID control principle is used to remotely control the hydraulic system and adjust the displacement of clearance piston, so as to realize the stepless regulation of compressor gas volume. The control system has simple structure and stable operation, and achieves the purpose of energy saving and consumption reduction.
Key words: DCS; compressor; clearance adjustment; hydraulic control; energy conservation
