紅外圖像邊緣檢測(cè)中自適應(yīng)閾值法應(yīng)用研究
2024-12-06 00:00:00張紅河
中國(guó)新技術(shù)新產(chǎn)品 2024年15期

摘 要:為了解決紅外圖像邊緣檢測(cè)固定閾值法存在的邊緣細(xì)節(jié)缺失、降噪效果差的問(wèn)題,本文提出了一種自適應(yīng)閾值算法。采用中值濾波算法得到紅外圖像的灰度值,計(jì)算梯度值和梯度方向,同時(shí)對(duì)非極大值進(jìn)行抑制,采用自適應(yīng)閾值算法確定高低閾值,得到紅外圖像的邊緣信息。為了驗(yàn)證本文算法正確性,本文進(jìn)行一系列對(duì)比測(cè)試,使用MSE、PSNR和MSSIM 3個(gè)參數(shù)對(duì)定量進(jìn)行分析和計(jì)算。測(cè)試結(jié)果表明,本文算法能夠清晰、完整地提取紅外圖像的邊緣信息,MSE降低,MSSIM更接近1,適用性很好。
關(guān)鍵詞:自適應(yīng)閾值法;紅外圖像;邊緣檢測(cè);Canny算法
中圖分類號(hào):TN 919" " " " " 文獻(xiàn)標(biāo)志碼:A
紅外成像技術(shù)發(fā)展非常迅速,其廣泛應(yīng)用于工業(yè)、農(nóng)業(yè)、醫(yī)學(xué)和軍事等領(lǐng)域。紅外圖像可以顯示目標(biāo)和背景的溫度差異,一般情況下,背景區(qū)域的灰度值比目標(biāo)區(qū)域的灰度值小。由于紅外探測(cè)器件的限制,因此紅外圖像的效果還存在一些缺陷,例如噪聲大、清晰度不高和邊緣模糊等[1]。邊緣是經(jīng)過(guò)處理得到的灰度發(fā)生急劇變化的區(qū)域像素集合,邊緣信息是紅外圖像的重要特征,邊緣檢測(cè)技術(shù)不僅為圖像分割和特征提取提供基礎(chǔ)數(shù)據(jù),還為目標(biāo)識(shí)別提供重要數(shù)據(jù),因此邊緣檢測(cè)技術(shù)十分重要。邊緣檢測(cè)技術(shù)是紅外圖像處理領(lǐng)域的難題之一[2]。目前,常用的邊緣檢測(cè)算法有LoG算子、Prewitt算子和Sobel算子等算法,這些算子算法具有算法簡(jiǎn)單、速度快等優(yōu)點(diǎn),但是在灰度變化不大的紅外圖像邊緣檢測(cè)方面其效果不好,受噪聲、溫度影響很大[3]。有學(xué)者提出Canny算子固定閾值算法,該算法能夠改進(jìn)非極大值抑制,與其他算子算法相比,檢測(cè)的邊緣細(xì)節(jié)質(zhì)量明顯提升。但是,其每次進(jìn)行紅外圖像邊緣檢測(cè)之前都需要設(shè)置閾值,如果閾值設(shè)置不合適,邊緣細(xì)節(jié)就容易丟失,準(zhǔn)確度也會(huì)不同程度地降低[4]。為提高紅外圖像的邊緣檢測(cè)效果,本文提出自適應(yīng)閾值算法,該算法能夠自動(dòng)選擇閾值,充分利用最小二乘原理,提高了紅外圖像邊緣檢測(cè)的效果。
1 傳統(tǒng)邊緣檢測(cè)算法
傳統(tǒng)Canny算子算法紅外圖像邊緣檢測(cè)過(guò)程如圖1所示。
設(shè)二維高斯噪聲為G(x,y),如公式(1)所示。
(1)
式中:σ為標(biāo)準(zhǔn)差;x、y為橫向、縱向2個(gè)隨機(jī)變量。
設(shè)待檢測(cè)紅外圖像為I(x,y),去噪圖像為L(zhǎng)(x,y),如公式(2)所示。
L(x,y)=G(x,y)·I (x,y) " " " " (2)
式中:*為卷積。
在計(jì)算過(guò)程中,σ為需要設(shè)定的1個(gè)定值,如果設(shè)定得太小,就可以很好地保留紅外圖像的細(xì)節(jié),但是去噪效果比較差;如果設(shè)定得太大,那么去噪效果很好,但是紅外圖像的很多細(xì)節(jié)會(huì)丟失,因此σ值設(shè)定非常重要,需要平衡去噪效果,并保留紅外圖像細(xì)節(jié)之間的關(guān)系[5]。即使設(shè)定了2個(gè)合適的高低閾值,其只能用于灰度分布變化不明顯的紅外圖像,如果紅外圖像的灰度分布變化明顯,就需要再次設(shè)置高低2個(gè)閾值[6]。
2 自適應(yīng)閾值算法
2.1 中值濾波算法原理
設(shè)A×B為待檢測(cè)紅外圖像,H(x,y)為灰度值,d為濾波半徑,D為最大濾波半徑,R1為目前濾波半徑紅外圖像灰度的最小值,R2為目前濾波半徑紅外圖像灰度的中間值,R3為目前濾波半徑紅外圖像灰度的最大值。算法包括以下5個(gè)步驟。第一步,設(shè)初始d的值為1。第二步,計(jì)算R1、R2和R3的值。第三步,如果R1、R2和R3這3個(gè)值之間的關(guān)系為R1lt;R2lt;R3,那么繼續(xù)執(zhí)行第五步;如果出現(xiàn)其他情況,那么d=d+1。第四步,如果1lt;dlt;D,那么執(zhí)行第二步,直到d=D為止。第五步,如果R1lt; H(x,y)lt; R3,那么輸出當(dāng)前的灰度值;如果出現(xiàn)其他情況,那么輸出R2。
2.2 梯度計(jì)算非極大值抑制
函數(shù)J(x,y)為中值濾波后的紅外圖像,其在x方向的梯度分量Jx(x,y)如公式(3)所示。
Jx(x,y)=J(x,y+1)- J(x,y) " " " "(3)
式中:J(x,y+1)為中值濾波前紅外圖像。
在y方向的梯度Jy(x,y)分量如公式(4)所示。
Jy(x,y)=J(x+1,y)- J(x,y) " " " " " (4)
式中:J(x+1,y)為中值濾波前紅外圖像y方向分量。
梯度幅值H(x,y)如公式(5)所示。
(5)
梯度方向θ(x,y)如公式(6)所示。
(6)
使用3×3的鄰域矩陣,計(jì)算中值濾波后紅外圖像中的全部像素點(diǎn),在計(jì)算過(guò)程中如果梯度方向上相鄰2個(gè)點(diǎn)的幅度比去噪圖像L(x,y)小,就可以將這個(gè)像素點(diǎn)作為邊緣點(diǎn);如果出現(xiàn)其他情況,就不能作為邊緣點(diǎn),其值記成0[7]。
2.3 自適應(yīng)閾值算法
使用Otsu算法將處理后的紅外圖像進(jìn)行區(qū)域劃分,劃分為1個(gè)前景區(qū)域,1個(gè)背景區(qū)域,這2個(gè)區(qū)域之間的方差最大,得到立項(xiàng)的區(qū)域分割閾值。
mt為紅外圖像的灰度,其范圍為[0,255],M為紅外圖像的像素?cái)?shù),灰度概率計(jì)算過(guò)程如公式(7)所示。
(7)
式中:Qt為灰度概率。
Y為閾值,利用Y將紅外圖像的像素分為2類,如公式(8)所示。
(8)
式中:E1為前景區(qū)域的像素;E2為后景區(qū)域的像素。
E1的產(chǎn)生概率Q1如公式(9)所示。
(9)
式中:t為像素個(gè)數(shù);qt為像素出現(xiàn)的概率。
E2的產(chǎn)生概率Q2如公式(10)所示。
(10)
式中:q1為前景區(qū)域像素出現(xiàn)的概率。
相應(yīng)的平均灰度δ1、δ2如公式(11)、公式(12)所示。
(11)
(12)
紅外圖像的總平均灰度δ如公式(13)所示。
(13)
紅外圖像前景區(qū)域和背景區(qū)域的總方差φ2如公式(14)所示。
φ2=Q1(δ1-δ)2+Q2(δ2-δ)2=Q1Q2(δ1-δ2)2 (14)
當(dāng)紅外圖像的灰度為[0,255]時(shí),當(dāng)φ2最大時(shí),對(duì)應(yīng)的Y值為最高閾值,如果設(shè)定最低閾值是最高閾值的一半,就可以采用高低閾值算法檢測(cè)關(guān)聯(lián)邊緣,得到待檢測(cè)紅外圖像的邊緣信息。
3 測(cè)試結(jié)果
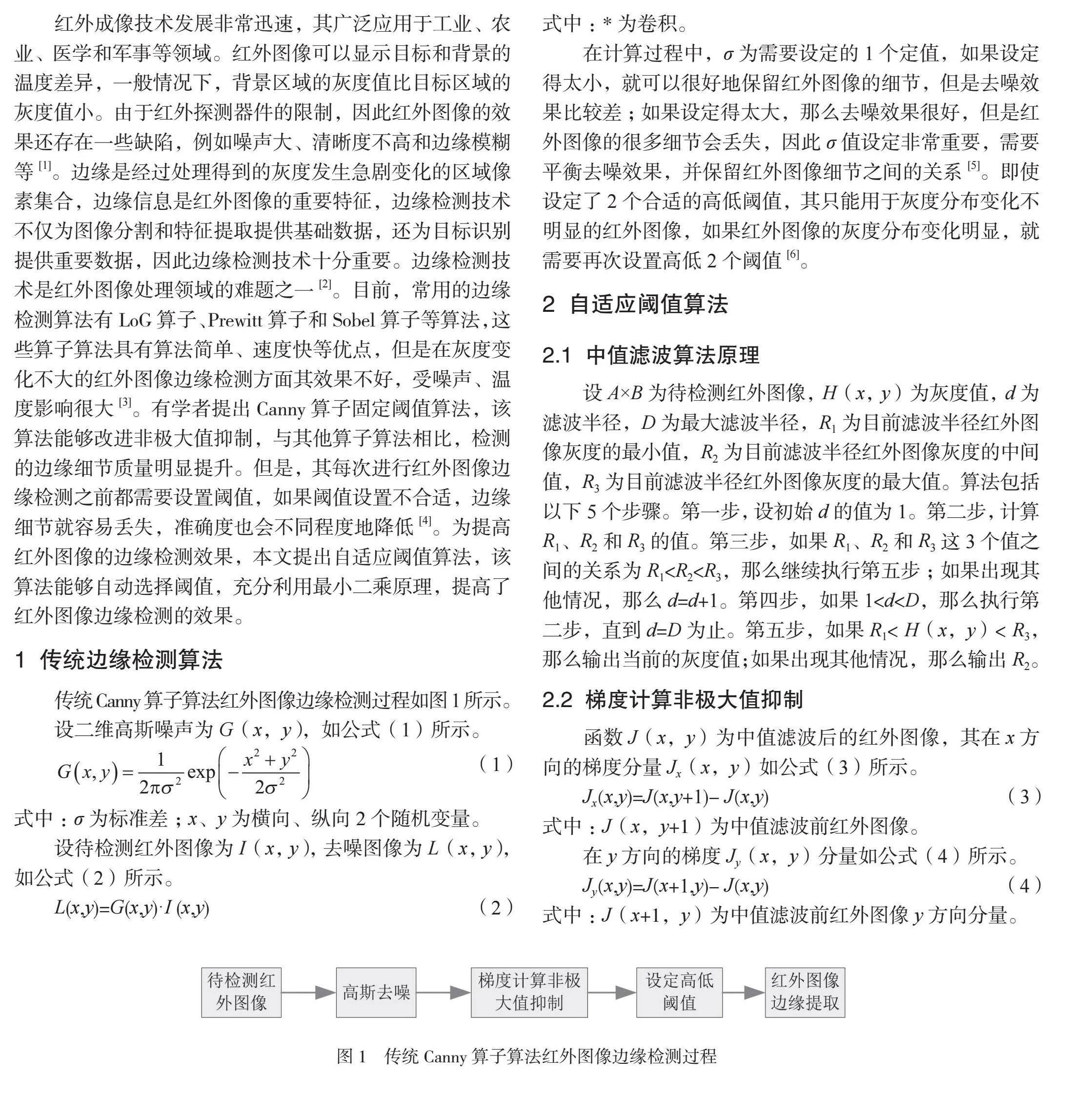
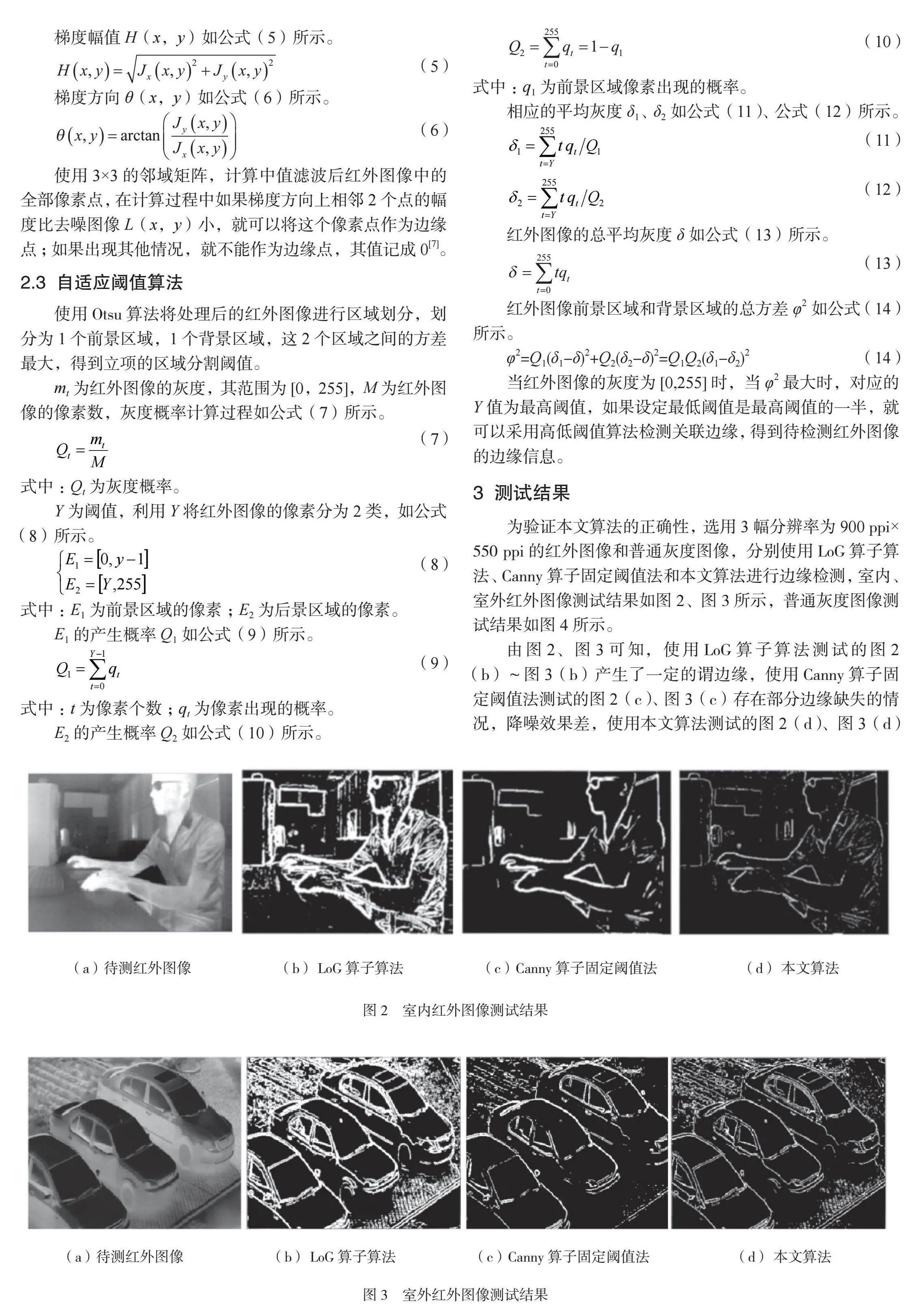
為驗(yàn)證本文算法的正確性,選用3幅分辨率為900 ppi×
550 ppi的紅外圖像和普通灰度圖像,分別使用LoG算子算法、Canny算子固定閾值法和本文算法進(jìn)行邊緣檢測(cè),室內(nèi)、室外紅外圖像測(cè)試結(jié)果如圖2、圖3所示,普通灰度圖像測(cè)試結(jié)果如圖4所示。
由圖2、圖3可知,使用LoG算子算法測(cè)試的圖2(b)~圖3(b)產(chǎn)生了一定的謂邊緣,使用Canny算子固定閾值法測(cè)試的圖2(c)、圖3(c)存在部分邊緣缺失的情況,降噪效果差,使用本文算法測(cè)試的圖2(d)、圖3(d)邊緣檢測(cè)完整,沒(méi)有假邊緣,降噪效果好。由圖4可知,本文算法能夠用于普通灰度圖像邊緣檢測(cè)中,適用性很強(qiáng)。
為了進(jìn)一步驗(yàn)證本文算法的正確性,使用圖像質(zhì)量評(píng)估指標(biāo)均方誤差(Mean-Square Error,MSE)進(jìn)行定量分析,如公式(15)所示。
(15)
式中:AB為圖像大小;A-1為長(zhǎng)度,;B-1為縱向高度;I(x,y)為原始圖像;Io(x,y)為經(jīng)過(guò)處理的輸出圖像。
使用3種方法得到的MSE計(jì)算結(jié)果見(jiàn)表1。由表1可知,與LoG算子算法相比,使用Canny算子固定閾值法,MSE有所降低,但是不明顯;使用本文算法,MSE明顯降低,說(shuō)明本算法的紅外圖像邊緣檢測(cè)效果更好。
峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)也是衡量圖像效果的重要指標(biāo),計(jì)算過(guò)程如公式(16)所示。
(16)
使用3種方法得到的PSNR計(jì)算結(jié)果見(jiàn)表2。
由表2可知,與其他2種算法相比,使用本文算法得到的PSNR明顯提高,其也適用于普通灰度圖像。
為了綜合證明本文算法對(duì)紅外圖像的邊緣檢測(cè)的優(yōu)勢(shì),使用結(jié)構(gòu)相似度(Structural Similarity,SSIM)進(jìn)行定量分析。
設(shè)使用Canny算子固定閾值法和使用本文算法得到的圖像分別為M和N,兩者之間的相似度如公式(17)所示。
(17)
式中:δM和δN為灰度平均值;γMN為協(xié)方差;γM和γN為方差;τ1、τ2為接近于0的正常數(shù)。
在實(shí)際應(yīng)用中,通常劃分為若干個(gè)子模塊,本文分為K個(gè)子模塊,利用一定大小的窗口逐個(gè)滑動(dòng)圖像中的像素點(diǎn),按順序計(jì)算所有子塊圖像的SSIM,得到平均結(jié)構(gòu)相似度(Mean Structural Similarity Index Measure,MSSIM),如公式(18)所示。
(18)
式中:mi為圖像M的第i個(gè)子模塊;ni為圖像N的第i個(gè)子模塊。
使用3種方法處理的圖像MSSIM計(jì)算結(jié)果見(jiàn)表3。
MSSIM越接近1,與原圖像越接近,由表3可知,本文算法得到的MSSIM更接近1,說(shuō)明使用本文算法得到的圖像與原圖更接近。
4 結(jié)論
本文論述了自適應(yīng)閾值法在紅外圖像邊緣檢測(cè)中的應(yīng)用,利用Canny算子固定閾值算法的基本原理采用中值濾波算法得到紅外圖像的灰度值,計(jì)算梯度值和梯度方向,同時(shí)對(duì)非極大值進(jìn)行抑制,采用自適應(yīng)閾值算法確定高低閾值。為了驗(yàn)證本文算法的正確性,本文測(cè)試了室內(nèi)、外紅外圖像和普通灰度圖像,使用MSE、PSNR和MSSIM這3個(gè)參數(shù)進(jìn)行定量分析。測(cè)試結(jié)果表明,使用本文算法進(jìn)行邊緣檢測(cè),效果更好,適用性更強(qiáng)。
參考文獻(xiàn)
[1]谷雨,劉俊,沈宏海,等.基于改進(jìn)多尺度分形特征的紅外圖像弱小目標(biāo)檢測(cè)[J].光學(xué)精密工程,2020,28(6):1375-1386.
[2]王園園,趙耀宏,羅海波,等.海面紅外圖像的動(dòng)態(tài)范圍壓縮及細(xì)節(jié)增強(qiáng)[J]. 紅外與激光工程,2019,48(1):307-315.
[3]馮鑫.Tetrolet框架下紅外與可見(jiàn)光圖像融合[J].光子學(xué)報(bào),2019,48(2): 76-84.
[4]周晨旭,黃福珍.基于BLMD 和NSDFB 算法的紅外與可見(jiàn)光圖像融合方法[J]. 紅外技術(shù),2019,41(2):176-182.
[5]楊飛凡,李暉,吳云韜.基于極平面圖的高精度光場(chǎng)深度估計(jì)[J].光電子技術(shù),2019,39(4):238-243.
[6]張加朋,于鳳芹.基于Canny 算子改進(jìn)型的影像測(cè)量邊緣檢測(cè)[J].激光與光電子學(xué)進(jìn)展,2020,57(24):258-265.
[7]李永倩,王健健.布里淵散射譜圖像的邊緣特征提取方法[J].光通信技術(shù),2021,45(3):37-41.
