變電站機(jī)器人巡檢路徑控制系統(tǒng)的設(shè)計(jì)
2024-12-06 00:00:00王進(jìn)財(cái)張義虎伏學(xué)段旗城馮小龍
中國(guó)新技術(shù)新產(chǎn)品 2024年21期


摘 要:本文針對(duì)傳統(tǒng)人工巡檢效率低、耗時(shí)長(zhǎng)的問(wèn)題,提出基于多目標(biāo)任務(wù)的巡檢路徑規(guī)劃方法,利用融合蟻群算法和JPS算法提升路徑規(guī)劃效率和質(zhì)量。對(duì)JPS算法進(jìn)行改進(jìn),優(yōu)化路徑轉(zhuǎn)折角度,降低碰撞風(fēng)險(xiǎn)。仿真試驗(yàn)結(jié)果表明,改進(jìn)后的JPS算法在縮短巡檢路徑、減少耗時(shí)和轉(zhuǎn)彎次數(shù)方面表現(xiàn)優(yōu)秀,顯著提高巡檢效率,保障巡檢安全。本文為變電站智能巡檢提供技術(shù)支持,提升智能電網(wǎng)運(yùn)行的可靠性。
關(guān)鍵詞:變電站巡檢;路徑控制;蟻群算法;JPS算法
中圖分類號(hào):TP 242" " " " " " " 文獻(xiàn)標(biāo)志碼:A
隨著智能電網(wǎng)的快速發(fā)展,變電站成為電力系統(tǒng)的關(guān)鍵設(shè)施。傳統(tǒng)的人工巡檢方式耗時(shí)耗力,不能全面、及時(shí)地發(fā)現(xiàn)潛在的安全隱患。因此,使用機(jī)器人的智能巡檢模式成為研究熱點(diǎn)[1]。智能巡檢機(jī)器人對(duì)變電站設(shè)備進(jìn)行自主、高效巡檢,機(jī)器人巡檢的核心是路徑規(guī)劃,即巡檢機(jī)器人根據(jù)變電站的復(fù)雜環(huán)境,結(jié)合當(dāng)前位置和巡檢目標(biāo)位置規(guī)劃1條最優(yōu)的巡檢路徑,不僅需要保證巡檢的全面性和準(zhǔn)確性,還需要考慮路徑的安全性、長(zhǎng)度、光滑度以及轉(zhuǎn)變數(shù)等因素,以提高巡檢效率并降低能耗[2]。
本文從變電站巡檢機(jī)器人路徑控制的需求出發(fā),分析巡檢任務(wù)的特點(diǎn),并提出基于多目標(biāo)任務(wù)的巡檢路徑規(guī)劃方法,融合蟻群算法[3]和跳躍點(diǎn)尋路(Jump Point Search,JPS)算法[4]探討其在巡檢路徑規(guī)劃方面的優(yōu)化效果和性能提升。同時(shí),本文對(duì)JPS算法進(jìn)行改進(jìn),以適應(yīng)變電站巡檢的復(fù)雜環(huán)境,并利用仿真試驗(yàn)驗(yàn)證所提方法的有效性和可行性,優(yōu)化巡檢路徑,降低巡檢過(guò)程中的風(fēng)險(xiǎn),提高巡檢的可靠性和安全性。
1 變電站巡檢路徑控制需求
由于變電站內(nèi)部設(shè)備設(shè)施布局復(fù)雜,變電站機(jī)器人巡檢與一般的巡檢要求不同,因此,本文針對(duì)變電站巡檢特征分析了變電站巡檢路徑控制的關(guān)鍵需求。1)提高路徑搜索效率,以保證巡檢機(jī)器人能夠迅速定位并遍歷所有巡檢點(diǎn)。2)優(yōu)化巡檢路徑距離,規(guī)劃最短路徑來(lái)減少巡檢的總路程,降低能耗。3)減少巡檢過(guò)程中的轉(zhuǎn)彎次數(shù),并盡可能縮短巡檢耗時(shí),以提升巡檢的整體效率。以上需求構(gòu)成了路徑控制系統(tǒng)設(shè)計(jì)的核心目標(biāo),利用智能化手段解決傳統(tǒng)人工巡檢方式中存在的效率低、耗時(shí)長(zhǎng)等問(wèn)題。
2 多目標(biāo)任務(wù)巡檢路徑規(guī)劃
2.1 蟻群算法
蟻群算法(Ant Colony Optimization,ACO)是一種模擬自然界中螞蟻覓食行為的啟發(fā)式優(yōu)化算法,其原理來(lái)自螞蟻在尋找食物源過(guò)程中釋放并感知信息素的現(xiàn)象,螞蟻會(huì)根據(jù)路徑中信息素的濃度選擇行走方向,并留下新的信息素以影響后續(xù)螞蟻的決策,信息素濃度高的路徑會(huì)逐漸被更多螞蟻選擇,形成1條最優(yōu)路徑。
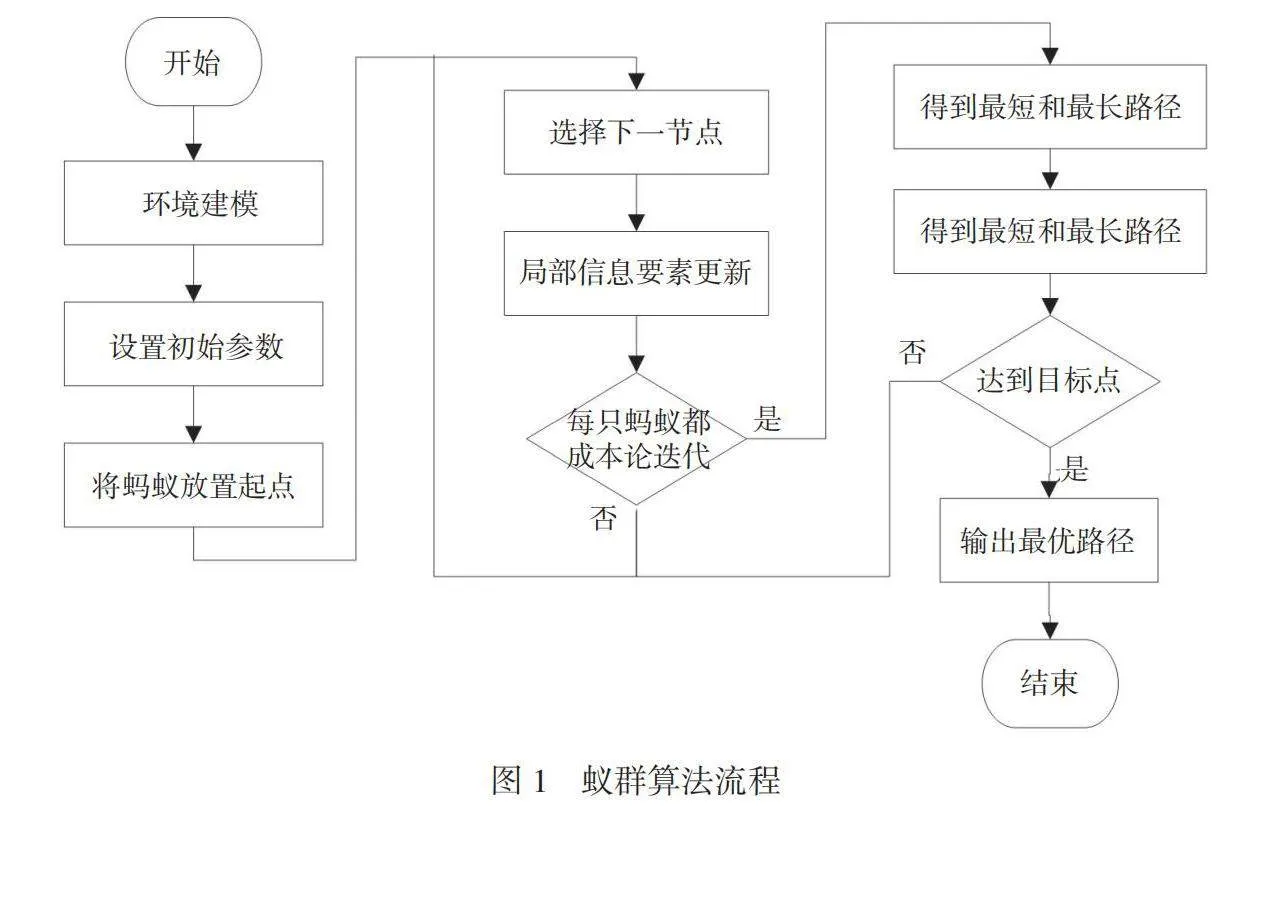
在巡檢路徑規(guī)劃中,構(gòu)建一系列候選路徑,確定每條路徑的信息素濃度。當(dāng)算法開(kāi)始時(shí),所有路徑的信息素濃度相同。隨后,算法模擬螞蟻的覓食過(guò)程,在每次迭代過(guò)程中,螞蟻根據(jù)各條路徑的信息素濃度,參考啟發(fā)式信息,例如路徑長(zhǎng)度、安全性等,選擇1條路徑進(jìn)行遍歷,并在遍歷過(guò)的路徑中釋放新的信息素,算法也會(huì)根據(jù)一定的蒸發(fā)規(guī)則減少路徑中的信息素濃度,以模擬信息素的消散過(guò)程。蟻群算法流程如圖1所示。
蟻群算法在巡檢機(jī)器人路徑規(guī)劃中的優(yōu)勢(shì)是其能夠進(jìn)行分布式計(jì)算、具有正反饋機(jī)制以及魯棒性強(qiáng)等,經(jīng)過(guò)多次迭代,算法能夠逐漸收斂至1條相對(duì)較好的巡檢路徑。
2.2 JPS算法
由上文了解蟻群算法在變電站智能巡檢路徑控制系統(tǒng)中的應(yīng)用,蟻群算法具有計(jì)算量大、收斂速度慢等局限性,在復(fù)雜的變電站巡檢環(huán)境中需要較長(zhǎng)的計(jì)算時(shí)間才能找到滿意的解,因此將蟻群算法與其他算法相結(jié)合,以提高路徑規(guī)劃的效率和質(zhì)量。變電站巡檢具有復(fù)雜性和多樣性,因此需要將不同算法的優(yōu)勢(shì)相結(jié)合。JPS算法是一種高效的路徑搜索算法,其減少不必要的搜索節(jié)點(diǎn),顯著提升路徑規(guī)劃的效率,在變電站智能巡檢路徑控制系統(tǒng)中,JPS算法廣泛應(yīng)用于優(yōu)化巡檢路徑。JPS算法的基本原理是識(shí)別路徑中的“跳躍點(diǎn)”(Jump Points),需要對(duì)地圖或環(huán)境進(jìn)行預(yù)處理,以識(shí)別那些允許直接跳躍的特定位置,即跳躍點(diǎn)。這些跳躍點(diǎn)通常是路徑中的關(guān)鍵點(diǎn),其與周圍環(huán)境存在特定關(guān)系,因此從該點(diǎn)出發(fā)可以跳過(guò)一定范圍內(nèi)的檢查,直接跳轉(zhuǎn)至下1個(gè)可能的點(diǎn)。例如,在直線路徑中,除了起點(diǎn)和終點(diǎn),中間的點(diǎn)可以視為跳躍點(diǎn),因?yàn)檠矙z機(jī)器人無(wú)須逐個(gè)檢查這些點(diǎn),所以只需沿直線前進(jìn)。在搜索過(guò)程中,JPS算法利用預(yù)處理得到跳躍點(diǎn)信息,從起始點(diǎn)開(kāi)始逐步向目標(biāo)點(diǎn)逼近。當(dāng)?shù)竭_(dá)一個(gè)節(jié)點(diǎn)時(shí),會(huì)檢查該節(jié)點(diǎn)是否為跳躍點(diǎn),并且決定是直接跳轉(zhuǎn)到下一個(gè)跳躍點(diǎn),還是按照傳統(tǒng)方式繼續(xù)搜索周圍的節(jié)點(diǎn)。采用這種方式可以減少搜索空間,提高搜索效率。
2.3 蟻群-JPS算法的融合
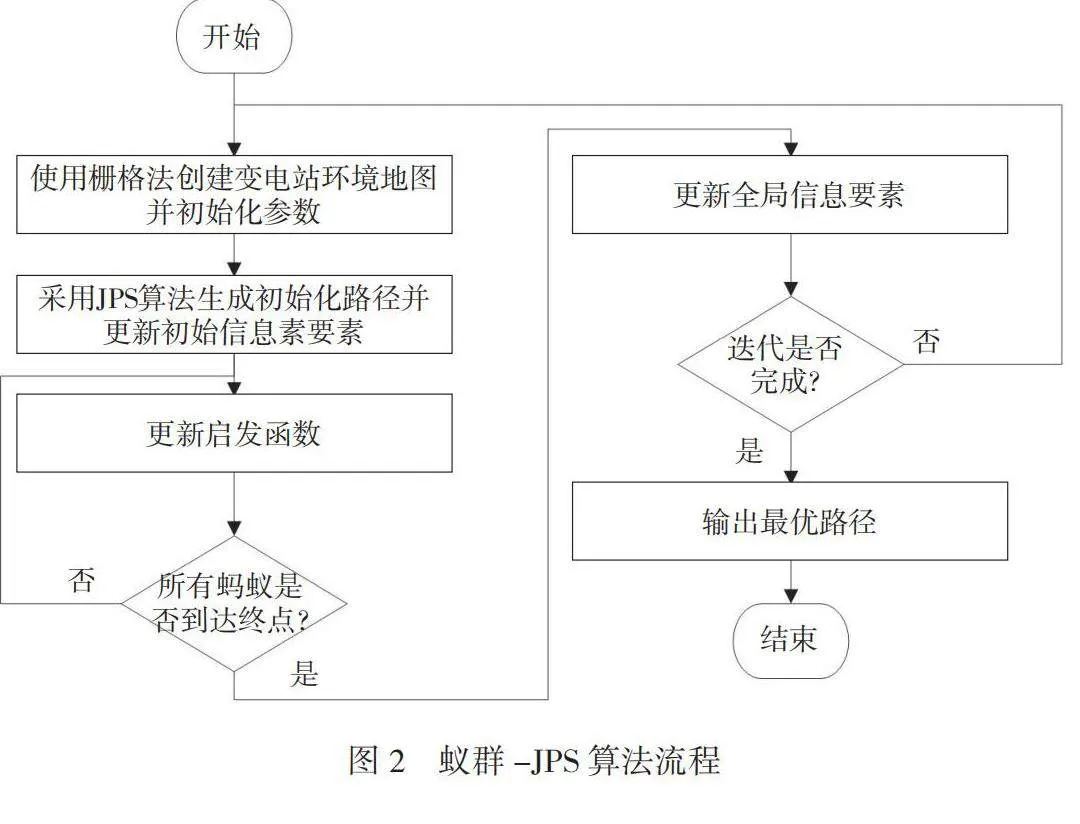
為了提高機(jī)器人巡檢路徑規(guī)劃的效率,本文融合蟻群算法與JPS算法,融合算法結(jié)合了蟻群算法的全局搜索能力與JPS算法的高效搜索特點(diǎn),在復(fù)雜環(huán)境中進(jìn)行最優(yōu)巡檢路徑規(guī)劃。具體流程如圖2所示。
2.3.1 步驟一:使用柵格法創(chuàng)建變電站環(huán)境地圖并初始化參數(shù)
利用柵格法將變電站的環(huán)境劃分為若干個(gè)小格子,每個(gè)格子代表環(huán)境中的1個(gè)區(qū)域。初始化蟻群算法和JPS算法所需的各項(xiàng)參數(shù),包括信息素濃度、蒸發(fā)率、螞蟻數(shù)量和迭代次數(shù)等。
2.3.2 步驟二:采用JPS算法生成初始化路徑并更新初始信息素要素
利用JPS算法的高效搜索機(jī)制快速生成1條從起點(diǎn)至終點(diǎn)的初步巡檢路徑。該路徑是蟻群算法的初始化路徑,并在此基礎(chǔ)上初始化信息素要素。為JPS算法生成的路徑中的節(jié)點(diǎn)賦予較高的信息素濃度,引導(dǎo)蟻群算法在后續(xù)的迭代過(guò)程中優(yōu)先探索這些區(qū)域。
2.3.3 步驟三:更新啟發(fā)函數(shù)
在蟻群算法中,當(dāng)選擇路徑時(shí),啟發(fā)函數(shù)生成螞蟻的考慮因子。為了發(fā)揮JPS算法的優(yōu)勢(shì),對(duì)啟發(fā)函數(shù)進(jìn)行相應(yīng)調(diào)整,使其不僅考慮路徑的長(zhǎng)度,還考慮路徑的安全性、光滑度以及是否包括跳躍點(diǎn)等因素。這樣,螞蟻在搜索過(guò)程中會(huì)傾向于選擇那些既能夠縮短路徑長(zhǎng)度,又能夠滿足安全性和其他要求的路徑。
2.3.4 步驟四:螞蟻移動(dòng)與全局信息素更新
模擬螞蟻的覓食行為,每只螞蟻根據(jù)當(dāng)前位置的信息素濃度和啟發(fā)函數(shù)選擇下一步的移動(dòng)方向。當(dāng)螞蟻完成一次遍歷后,根據(jù)路徑的質(zhì)量和長(zhǎng)度更新路徑中的信息素濃度。同時(shí),根據(jù)JPS算法的結(jié)果對(duì)初始信息素濃度進(jìn)行調(diào)整,以加快算法的收斂速度。
2.3.5 步驟五:迭代過(guò)程與最優(yōu)路徑輸出
重復(fù)上述步驟,直至所有螞蟻都到達(dá)終點(diǎn)或達(dá)到預(yù)設(shè)的最大迭代次數(shù)。在每次迭代結(jié)束后,根據(jù)所有螞蟻的遍歷結(jié)果更新全局信息素要素。當(dāng)達(dá)到最大迭代次數(shù)時(shí),以當(dāng)前信息素濃度的最長(zhǎng)路徑作為最優(yōu)巡檢路徑輸出。融合算法能夠充分發(fā)揮蟻群算法的全局搜索能力,并利用JPS算法的高效搜索特點(diǎn)在變電站的復(fù)雜環(huán)境中快速找到1條既能夠滿足巡檢要求,又能夠降低能耗、提升安全性的最優(yōu)巡檢路徑。融合算法不僅提高了巡檢效率,還降低了巡檢過(guò)程中的安全風(fēng)險(xiǎn),為變電站智能巡檢提供了有力的技術(shù)支持。
3 改進(jìn)JPS算法的應(yīng)用
由于變電站內(nèi)部設(shè)備布局緊湊,因此在路徑規(guī)劃的過(guò)程中,特別是當(dāng)繞過(guò)設(shè)備或轉(zhuǎn)角處時(shí),如果路徑轉(zhuǎn)折角度過(guò)小,那么將增加巡檢機(jī)器人與設(shè)備發(fā)生碰撞的風(fēng)險(xiǎn),影響巡檢任務(wù)順利執(zhí)行。因此,需要解決蟻群-JPS算法在變電站巡檢路徑規(guī)劃中可能遇到的轉(zhuǎn)折角度過(guò)小的問(wèn)題,保證機(jī)器人能夠安全通過(guò),并減少不必要的碰撞風(fēng)險(xiǎn)。
3.1 轉(zhuǎn)折角度優(yōu)化
在JPS算法中,當(dāng)確定1個(gè)跳躍點(diǎn)時(shí),不僅考慮直線段的跳躍,還引入角度約束條件。當(dāng)計(jì)算跳躍點(diǎn)時(shí),評(píng)估從這個(gè)點(diǎn)到下一個(gè)可能的跳躍位置或目標(biāo)位置所在的直線和當(dāng)前路徑之間的角度,如果夾角小于預(yù)設(shè)的安全角度閾值,那么調(diào)整跳躍策略,選擇更安全的路徑方向,保證轉(zhuǎn)折角度足夠大,避免與設(shè)備發(fā)生碰撞。
3.2 跳點(diǎn)處理優(yōu)化
對(duì)JPS算法中的跳點(diǎn)進(jìn)行精細(xì)化處理,不僅基于直線或直角關(guān)系確定跳點(diǎn),還引入更復(fù)雜的幾何計(jì)算,例如圓弧擬合等,使路徑在轉(zhuǎn)折處更加平滑,減少尖銳轉(zhuǎn)角。
3.3 融合蟻群算法
將改進(jìn)后的JPS算法與蟻群算法相結(jié)合,利用蟻群算法的全局搜索能力和正反饋機(jī)制,在JPS算法提供的高效搜索框架內(nèi)進(jìn)一步優(yōu)化路徑選擇。在每次迭代中,蟻群算法根據(jù)路徑中的信息素濃度和啟發(fā)式信息,例如路徑長(zhǎng)度、安全性等,對(duì)JPS算法生成的候選路徑進(jìn)行評(píng)估和調(diào)整,逐步逼近最優(yōu)解。在保持蟻群-JPS算法原有優(yōu)勢(shì)的基礎(chǔ)上進(jìn)一步提升巡檢路徑的安全性,減少碰撞風(fēng)險(xiǎn),并優(yōu)化路徑的轉(zhuǎn)折角度,使巡檢機(jī)器人能夠更加順暢、安全地完成巡檢任務(wù)。
在優(yōu)化路徑的過(guò)程中,并行狀態(tài)是所有的設(shè)備所在點(diǎn)排列有用信息存在的狀態(tài)。設(shè)螞蟻k在巡檢點(diǎn)的位置為Qk lm(t),表示螞蟻當(dāng)前在巡檢點(diǎn)L選擇行動(dòng)至巡檢點(diǎn)M的概率,如公式(1)所示。
(1)
式中:τα lm(t)為t時(shí)刻巡檢點(diǎn)m和巡檢點(diǎn)l路徑中的信息素濃度;α為的相對(duì)重要程度;ηβ lm(t)為啟發(fā)式因子;β為η的相對(duì)重要程度;s為求和公式中的變量;allowedk為螞蟻k所能選擇的下一個(gè)巡檢點(diǎn)的集合。
全部巡查點(diǎn)的序列合集是螞蟻對(duì)所有的巡查點(diǎn)都按照一定順序檢查一遍以后,螞蟻在這個(gè)檢查過(guò)程中所經(jīng)過(guò)的路段。螞蟻更新信息素公式如公式(2)、公式(3)所示。
τlm(t+1)=(1-ρ)τlm(t)+Δτlm(t) " " " "(2)
Δτlm(t)=∑k lm(t) " " " " " " " " " " " " " " " " " " " " " " " " "(3)
式中: τlm(t+1)為在t+1時(shí)刻巡檢點(diǎn)m至l的信息素濃度;ρ為信息素的不同揮發(fā)程度,螞蟻更新信息素在[0,1];τlm(t)為在t時(shí)刻巡檢點(diǎn)m至l的信息素濃度;Δτlm(t)為螞蟻k在t時(shí)刻的這個(gè)階段在路徑區(qū)間中釋放的信息素的量,[l,m]為螞蟻?zhàn)哌^(guò)的巡檢路徑,如果螞蟻選擇的巡查路徑在走過(guò)以后信息素濃度變大了,那么增加量為Δτlm;Δτk lm(t)為在t時(shí)刻巡檢點(diǎn)m至l的信息素濃度的所有增量的和。
本文中信息素?fù)]發(fā)方式的更新模型如公式(4)所示。
(4)
式中:Q為信息素含量;Lk為螞蟻在巡檢過(guò)程中所途經(jīng)的路程距離總和;ank k passes thouth[l,m]為當(dāng)螞蟻k走過(guò)的巡檢路徑為[l,m]時(shí);otherwise為其他情況。
在螞蟻巡檢的過(guò)程中,信息素不斷發(fā)生變化,直至達(dá)到提前設(shè)置好的指標(biāo)值后算法收斂停止,在使用所有的算法得到結(jié)果后發(fā)現(xiàn)采用蟻群算法得到的路徑是最終解的最優(yōu)路徑。
4 仿真試驗(yàn)
4.1 試驗(yàn)方案
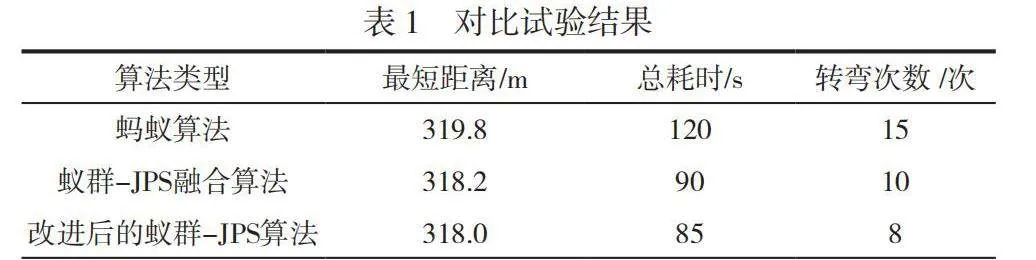
采用地圖化方式對(duì)變電站環(huán)境進(jìn)行處理,用柵格圖表示變電站中需要巡檢設(shè)備的布局。設(shè)置多組試驗(yàn),分別采用螞蟻算法、蟻群-JPS融合算法以及改進(jìn)后的JPS算法進(jìn)行巡檢路徑規(guī)劃。試驗(yàn)的主要評(píng)價(jià)指標(biāo)包括最短距離、總耗時(shí)以及轉(zhuǎn)彎次數(shù)。每組試驗(yàn)重復(fù)多次,取平均值以保證結(jié)果的準(zhǔn)確性。對(duì)比不同算法在相同環(huán)境中的性能表現(xiàn),驗(yàn)證所提蟻群-JPS融合算法和改進(jìn)JPS算法在巡檢路徑規(guī)劃中的優(yōu)化效果和可行性。
4.2 試驗(yàn)結(jié)果
根據(jù)試驗(yàn)方案,對(duì)螞蟻算法、蟻群-JPS融合算法以及改進(jìn)后的JPS算法在最短距離、總耗時(shí)和轉(zhuǎn)彎次數(shù)3個(gè)指標(biāo)方面的表現(xiàn)進(jìn)行對(duì)比,試驗(yàn)結(jié)果見(jiàn)表1。
改進(jìn)后的JPS算法在各項(xiàng)評(píng)價(jià)指標(biāo)方面均表現(xiàn)出色,在縮短巡檢路徑長(zhǎng)度、減少總耗時(shí)和轉(zhuǎn)彎次數(shù)方面具有明顯優(yōu)勢(shì),與傳統(tǒng)的螞蟻算法相比,蟻群-JPS融合算法的性能更好,試驗(yàn)結(jié)果驗(yàn)證了改進(jìn)后的蟻群-JPS算法在變電站智能巡檢路徑規(guī)劃中的效果和可行性。
5 結(jié)語(yǔ)
本文針對(duì)變電站機(jī)器人巡檢路徑控制系統(tǒng)進(jìn)行研究,采用智能化手段解決傳統(tǒng)人工巡檢方式存在的效率低、耗時(shí)長(zhǎng)等問(wèn)題,從變電站巡檢機(jī)器人路徑控制的需求出發(fā),明確了路徑控制系統(tǒng)設(shè)計(jì)的核心目標(biāo)。本文提出基于多目標(biāo)任務(wù)的巡檢路徑規(guī)劃方法,采用融合蟻群算法和JPS算法研究其在巡檢路徑規(guī)劃中的優(yōu)化效果和性能提升。由于蟻群算法存在計(jì)算量大、收斂速度慢等局限性,在變電站復(fù)雜環(huán)境中表現(xiàn)不佳,因此本文融合蟻群算法與JPS算法,利用JPS算法的高效搜索特點(diǎn)對(duì)復(fù)雜環(huán)境中的最優(yōu)巡檢路徑進(jìn)行規(guī)劃。本文還對(duì)JPS算法進(jìn)行改進(jìn),以適應(yīng)變電站巡檢的復(fù)雜環(huán)境。引入角度約束條件和跳點(diǎn)精細(xì)化處理,保障路徑在轉(zhuǎn)折處更加安全、平滑,降低了與設(shè)備發(fā)生碰撞的風(fēng)險(xiǎn),結(jié)合蟻群算法的全局搜索能力對(duì)改進(jìn)后的JPS算法生成的候選路徑進(jìn)行評(píng)估和調(diào)整,逐步逼近最優(yōu)解。試驗(yàn)結(jié)果表明,改進(jìn)后的JPS算法在縮短巡檢路徑長(zhǎng)度、減少總耗時(shí)和轉(zhuǎn)彎次數(shù)方面表現(xiàn)出色,顯著提高了巡檢效率和安全性,為變電站智能巡檢提供了有力的技術(shù)支持,推動(dòng)了智能電網(wǎng)技術(shù)的發(fā)展。
參考文獻(xiàn)
[1]朱道華,郭雅娟,韋磊,等.基于5G軟件定義網(wǎng)絡(luò)的變電站巡檢智能控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化技術(shù)與應(yīng)用,2024,43(7):111-116.
[2]金涌濤,張?zhí)癫ǎ居詈溃?變電站機(jī)器人巡檢中設(shè)備目標(biāo)動(dòng)態(tài)捕捉識(shí)別技術(shù)研究[J].機(jī)械設(shè)計(jì),2024,41(增刊1):159-164.
[3]趙思文,朱津欣.基于改進(jìn)蟻群算法的電力電纜敷設(shè)路徑規(guī)劃方法[J].電氣技術(shù)與經(jīng)濟(jì),2024(6):322-323.
[4]方霞,俞宏圖,熊齊.求解并行JSP作業(yè)車間調(diào)度問(wèn)題的一種混合遺傳算法[J].機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新,2021,34(1):78-79.
