電動汽車高壓連接器互鎖電路及故障檢測方法
2024-12-09 00:00:00李瑋王晶
汽車電器 2024年11期




【摘 要】文章設計一種電動汽車高壓連接器互鎖狀態檢測電路,通過兩路低壓信號實現對高壓器件連接狀態的有效檢測。基于該電路,提出一種高壓互鎖故障檢測方法,設計高壓互鎖信號波動參數,通過該參數表征電磁干擾對高壓互鎖信號的影響程度,并利用該參數實現高壓互鎖故障閾值的自適應調節,以此避免由于車輛環境中非預期電磁干擾而導致高壓互鎖故障的誤報問題。
【關鍵詞】電動汽車;高壓連接器;互鎖電路;故障檢測
中圖分類號:U469.72 文獻標識碼:B 文章編號:1003-8639( 2024 )11-0102-03
Interlocking Circuit and Fault Detection Method for High Voltage Connectors of Electric Vehicles*
【Abstract】The article designs a high-voltage connector interlock state detection circuit for electric vehicles,which achieves effective detection of the high-voltage device connection state through two low-voltage signals. Based on this circuit,a method for detecting high-voltage interlock faults is proposed. The high-voltage interlock signal fluctuation parameters are designed,which represent the degree of electromagnetic interference on the high-voltage interlock signal. The high-voltage interlock fault threshold is adjusted adaptively based on these parameters to avoid the problem of false reporting of high-voltage interlock faults due to unexpected electromagnetic interference in the vehicle environment.
【Key words】electric vehicles;high voltage connectors;interlocking circuit;fault detection
0 引言
與傳統燃油車不同,電動汽車行駛過程中所有的能量來源于高壓動力電池,車輛中大量零部件采用高壓電池供電,如電機控制器、電動空調壓縮機、直流/直流電壓轉換器和電輔助加熱裝置等。隨著電動汽車技術的迅速發展,民眾對車輛動力性能的要求越來越高,如更好的加速性能、更高的最高速度等,在以上因素促使下,純電動汽車高壓動力電池輸出電壓呈現出逐步升高的趨勢,目前部分電動汽車動力電池輸出的直流電壓已經超過700V。相較于交流電,高壓直流電更具有危險性,當發生觸電事故時高壓直流電對人身具有更大的傷害。基于以上背景,電動汽車的高壓安全成為各車輛生產廠家及科研機構的研究熱點[1-3]。
車輛在設計之初考慮了絕緣問題,能夠防范正常狀態下觸電事故的發生,但在一些非常規狀態下會有絕緣失效情況的發生,如事故引起的高壓線束破損、維修人員違規插拔高壓插件、高壓接插件松脫等,此時由于內部高壓環境與外界環境相連通,失去絕緣隔離,將使車輛及車上人員暴露在危險的高壓環境中。電動汽車高壓連接器互鎖功能通過連接器反饋的低壓信號實現高壓器件連接狀態的檢測,針對高壓暴露風險,中國純電動汽車國家標準以及地方標準均要求針對高壓互鎖故障進行檢測。考慮到純電動汽車內部具有大量的高低壓零部件,其內部電磁干擾情況非常復雜,在一些極端及異常狀態下,如零部件故障、零部件異常工作狀態、零部件屏蔽層老化破損等,用于檢測高壓互鎖故障的信號會受到干擾,從而增大故障的誤報幾率。考慮到高壓互鎖故障屬于嚴重影響人身安全的故障,目前業內大多采用嚴苛的故障處理方法,如整車下高壓或切斷動力輸出等,因此需要避免由于電磁干擾這種非真實因素所造成的故障誤報。
關于電動汽車高壓互鎖技術業內已有較多的研究成果[4-8],但均未針對電動汽車所處的強電磁干擾工作環境進行深入探索。本文設計一種電動汽車高壓連接器互鎖狀態檢測電路,通過兩路低壓信號實現對高壓器件連接狀態的有效檢測,在此基礎上提出一種高壓互鎖故障檢測方法,滿足電動汽車在強電磁干擾工作環境下對高壓連接器互鎖故障的檢測需求。
1 高壓連接器互鎖檢測電路原理
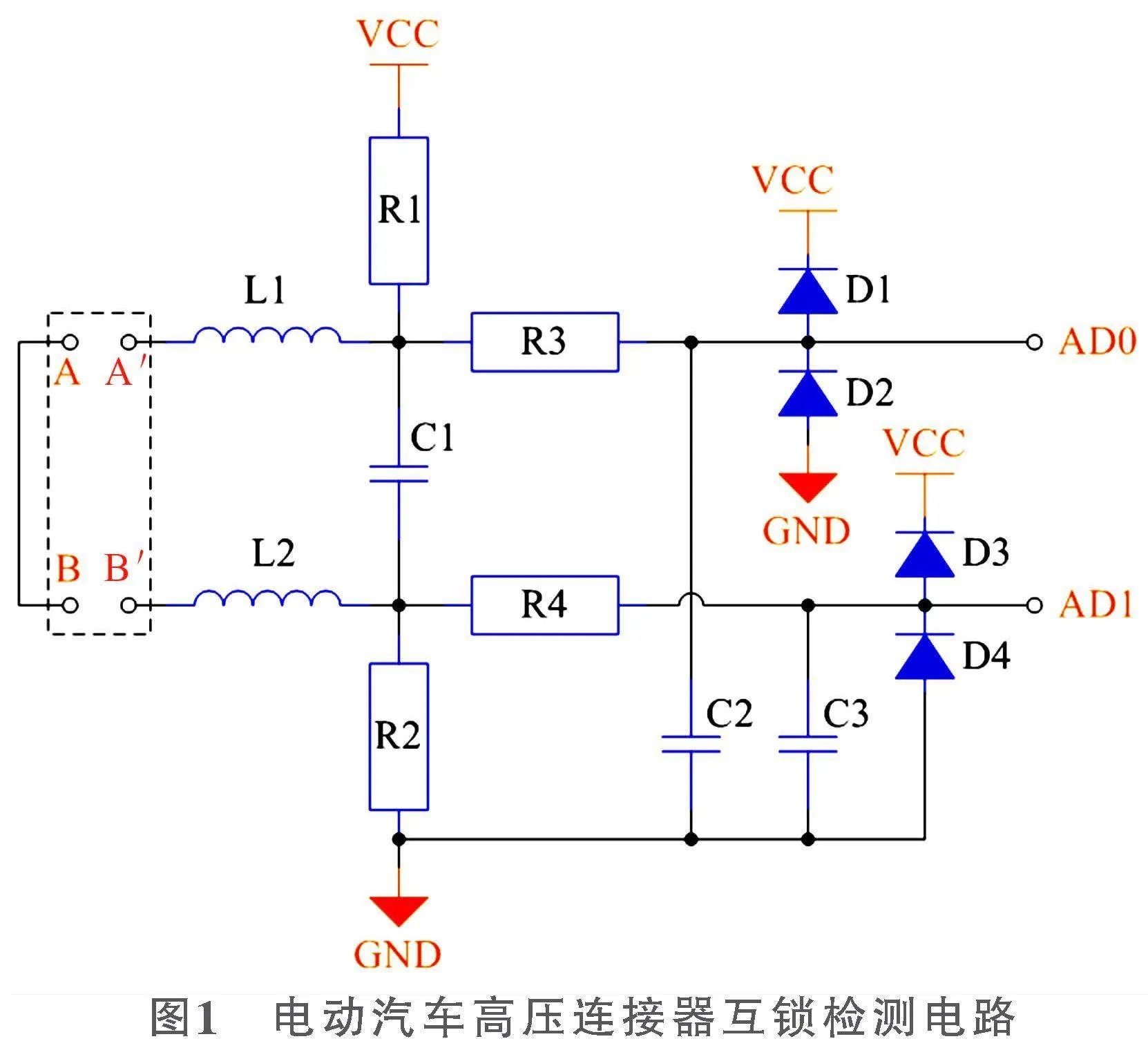
圖1虛線框內為高壓互鎖插件示意圖,其中A-B段為銅導線,該導線位于高壓互鎖接插件中,A′與B′右側的部分為本文所設計的電動汽車高壓連接器互鎖檢測電路。該電路中,電感L1、電阻R3與電容C2為A′通道RCL低通濾波電路,電感L2、電阻R4與電容C3為B′通道RCL低通濾波電路,以上電路實現了對A′與B′端口信號的硬件濾波處理,確保AD0與AD1采集端口的信號穩定。該電路中VCC為電路的低壓供電電源(VCC為5V),GND為電源地,電容C1起到隔離穩壓的作用,二極管D1、D2、D3、D4的作用為防止A′、B′端的非預期電壓對AD0與AD1這兩個A/D采集端口造成沖擊,其中AD0與AD1端口的電壓值由電動汽車內部控制器進行A/D采樣。
圖2為高壓連接器互鎖接插件剖面圖,對應圖1中虛線框內部分。圖2為接插件的斷開狀態,當接插件插緊后,插件中的高壓線纜1、2連接導通,同時低壓信號觸點A-A′、B-B′連接形成回路。根據該示意圖,高壓連接器由插緊狀態到斷開狀態變換過程中,在高壓接插件完全脫落前,低壓接插件能夠提前斷開并觸發故障,從而提高系統的安全性,即在高壓接插件未斷開前先檢測到高壓互鎖故障,并通過故障機制對車輛及人員安全提供保障。
當高壓連接器為連接狀態時,根據圖1所示電路電容C1處于短路狀態,這種狀態下AD0與AD1端口的電壓相等,均為VCC/2;當高壓連接器為斷開狀態,在R1上拉電阻的作用下,AD0端口的電壓為電源電壓VCC。同理,在下拉電阻R2的作用下,AD1端口的電壓為電源地。通過AD0與AD1兩路低壓信號便能夠實現對高壓連接器互鎖狀態的檢測。
2 高壓互鎖故障檢測實現架構
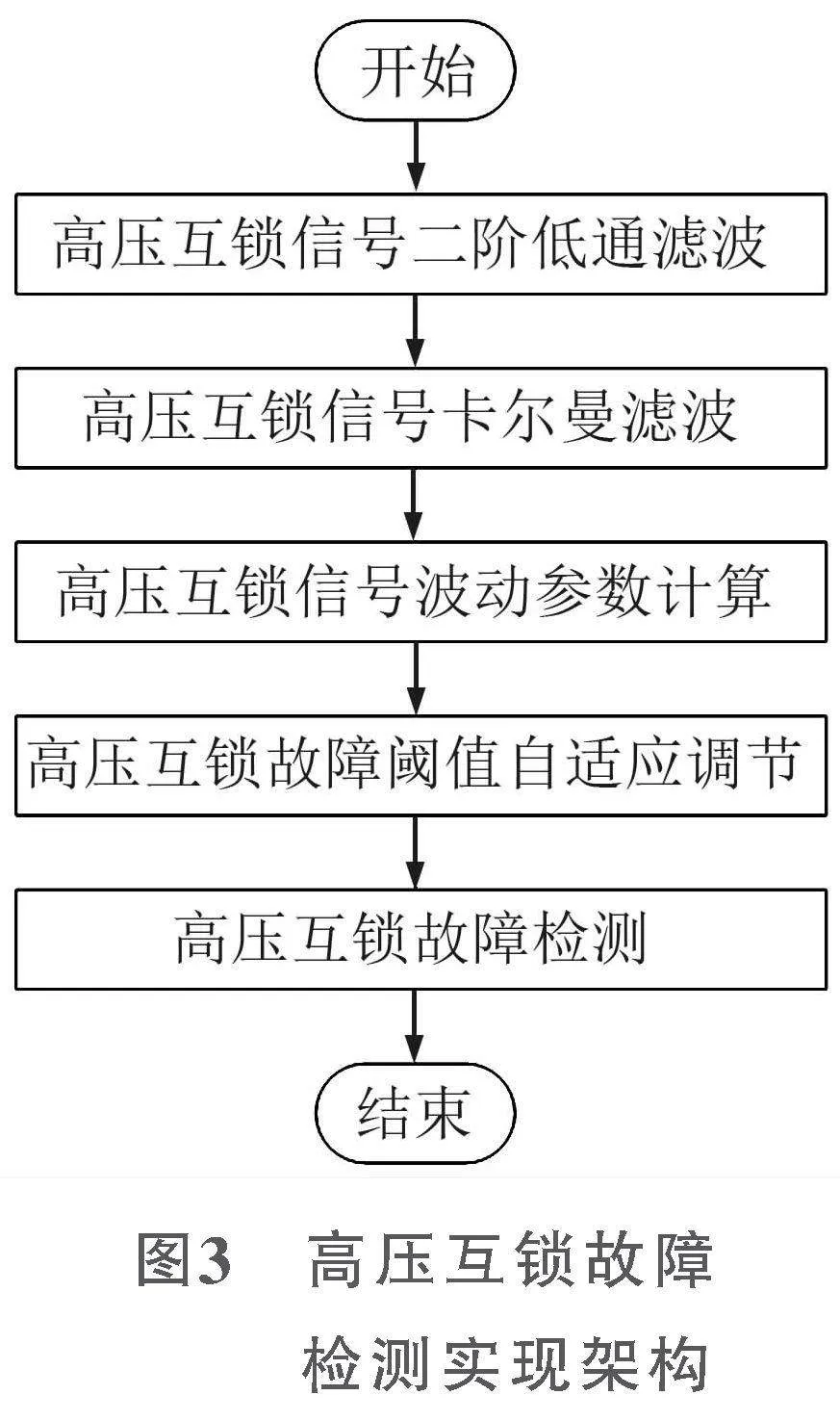
在圖1基礎上,提出一種高壓互鎖故障檢測方法,來滿足電動汽車在強電磁干擾工作環境下對高壓連接器互鎖故障的檢測需求。該方法的高壓互鎖故障檢測實現架構如圖3所示。
1)對利用高壓互鎖電路采集到的兩路高壓互鎖信號進行二階低通濾波處理。
2)在低通濾波基礎上采用卡爾曼濾波繼續對兩路高壓互鎖信號進行濾波,以此提高采集信號的可信度。
3)利用濾波后的兩路高壓互鎖信號進行高壓互鎖信號波動參數的計算。
4)根據高壓互鎖信號波動參數確定故障檢測的電壓閾值和持續時間閾值,實現故障閾值根據電磁干擾強度進行自適應調節,最終達到在高壓互鎖故障檢測中避免誤報的目的。
5)利用4)確定的故障電壓閾值和故障持續時間閾值進行高壓互鎖故障的判斷。
2.1 高壓互鎖信號二階低通濾波
根據圖2,首先對兩路低壓互鎖信號進行低通濾波處理,避免由于電磁干擾引起故障誤報。由于高壓接插件虛接或線路虛接所引起的互鎖信號波動屬于低頻擾動,其與車輛的振動頻率有關,但總而言之仍屬于低頻范疇,本文采用低通濾波方式能夠有效地將此頻段的有效信號予以保留,使由于高壓接插件或線路虛接所引起的真實故障能夠被有效地檢測出。
定義從圖1中AD0與AD1兩個采集端得到的原始高壓互鎖信號分別為UAD0與UAD1。以UAD0信號為例,對二階低通濾波處理方法進行說明。
式(1)為二階低通濾波離散型表達式。
ULow-0(n)=fAD(n)-fAD(n-2)(1)
式中:ULow-0(n)——當前控制周期低通濾波后AD0端口高壓互鎖電壓;fAD——中間變量,其表達式如下。
fAD(n)=KAUAD0(n)-KB fAD(n-1)-KC fAD(n-2)(2)
式中:UAD0(n)——本控制周期采集的AD0端口高壓互鎖原始電壓信號;KA、KB與KC——濾波系數,這3個系數用于調節低通濾波截止頻率等參數。
2.2 高壓互鎖信號卡爾曼濾波
考慮到由于圖1中基準電壓VCC、電容、電阻等元器件精度的影響,會導致采集到的高壓互鎖信號與真實值之間存在一定的誤差,為保證所獲得的高壓互鎖信號真實性,本文引入卡爾曼濾波。通過建立系統的狀態方程,對經低通濾波后得到的高壓互鎖信號再次進行濾波。
以AD0端口高壓互鎖信號為例,介紹卡爾曼濾波實現過程。針對經低通濾波后的AD0端口高壓互鎖信號ULow-0建立系統的狀態和觀測方程。式(3)為系統狀態方程,式(4)為系統觀測方程。
UK0(n)=UK0(n-1)+W(n-1)(3)
ULow-0(n)=UK0(n)+V(n)(4)
式中:UK0(n)——經卡爾曼濾波處理后得到的AD0端口高壓互鎖電壓信號;W——方差為Q的過程噪聲;V——觀測噪聲,其方差為R。
針對該系統,卡爾曼濾波利用第n-1個控制周期的高壓互鎖電壓信號預測第n個控制周期實際的高壓互鎖電壓信號。定義該系統的預計偏差為P(n|n-1),其表達式為:
P(n|n-1)=P(n-1)+Q(5)
式中:P(n|n-1)——第n-1個控制周期的偏差。
根據式(5)可以得到卡爾曼增益K,其表達式為:
根據式(6)得到關于高壓互鎖信號的卡爾曼濾波表達式:
UK0(n)=ULow-0(n-1)+K[ULow-0(n)-ULow-0(n-1)](7)
式中:UK0(n)——經卡爾曼濾波處理后得到的AD0端口高壓互鎖電壓信號。
在完成式(7)的計算后需要更新P,即計算本控制周期的偏差P(n),具體方法為:
P(n)=(1-K)P(n|n-1)(8)
式(8)計算完成后可以按照式(5)、式(6)、式(7)的形式開展下一周期的卡爾曼濾波,通過不斷迭代修正,來提高互鎖采集電壓信號的可信度。
2.3 高壓互鎖信號波動參數計算
本文針對高壓互鎖故障的檢測提出了高壓互鎖信號波動參數概念,利用該參數來表征電磁干擾對高壓互鎖信號的影響程度。以AD0端口高壓互鎖電壓信號為例,給出高壓互鎖信號波動參數的計算方法。
式中:KLock-0——根據AD0端口高壓互鎖電壓信號(卡爾曼濾波后得到的電壓信號)計算得到的高壓互鎖信號波動參數。該參數利用k個控制周期的采集數據計算得到,根據該式,在規定時間段內(k個控制周期)KLock-0值越大,則表明該路高壓互鎖信號的波動越劇烈,即此時的電磁干擾越強烈。本文正是利用該參數表征高壓互鎖信號波動程度的這一特點來確定后續的高壓互鎖故障閾值。
2.4 高壓互鎖故障閾值自適應調節
高壓互鎖信號波動參數確定的高壓互鎖故障閾值包括電壓閾值與時間閾值。以AD0端口對應的高壓互鎖信號波動參數為例,計算故障判斷閾值。
首先對計算得到的AD0端口高壓互鎖信號波動參數KLock-0進行限制,將其限制在區間[KMin-0,KMax-0]中,KMax-0>KMin-0>0。經過限制后,AD0端口高壓互鎖信號波動參數KLock-0不會低于KMin-0,同時也不會高于KMax-0。在此基礎上給出故障判斷閾值的確定方法。
式中:ΔV0——AD0端口高壓互鎖信號故障電壓閾值;T0——AD0端口高壓互鎖信號故障持續時間閾值。
可以看出,隨著KLock-0在區間[KMin-0,KMax-0]內的變化,故障電壓閾值ΔV0將在0.5~2V范圍內線性變化,故障持續時間閾值T0將在0.5~2.5s區間內線性變化。以上故障判斷閾值將用于最終的高壓互鎖故障判斷。
2.5 高壓互鎖故障檢測
在確定高壓互鎖故障的檢測閾值后進入到最后一個步驟——高壓互鎖故障檢測。本文基于AD0端口與AD1端口的互鎖信號進行高壓互鎖故障的檢測。
1)AD0端口高壓互鎖故障檢測:當互鎖電壓信號ULow-0不在2.5±ΔV0V的范圍并持續時間T0,則判斷發生AD0端口高壓互鎖故障。
2)AD1端口高壓互鎖故障檢測:故障檢測方法與AD0端口完全一致。
當AD0與AD1兩端口任意一個發生高壓互鎖故障,則判斷車輛發生高壓互鎖故障。
隨著電磁干擾的愈加強烈,高壓互鎖信號的電壓判斷范圍也相應增大,即從2.5±0.5V增大到2.5±2V,同時故障的持續判斷時間也由0.5s調整到2.5s,本文最終通過故障判斷閾值根據電磁干擾狀態進行自適應調節,最終實現避免強電磁干擾狀態下車輛高壓互鎖故障的誤報。
3 技術成果推廣應用
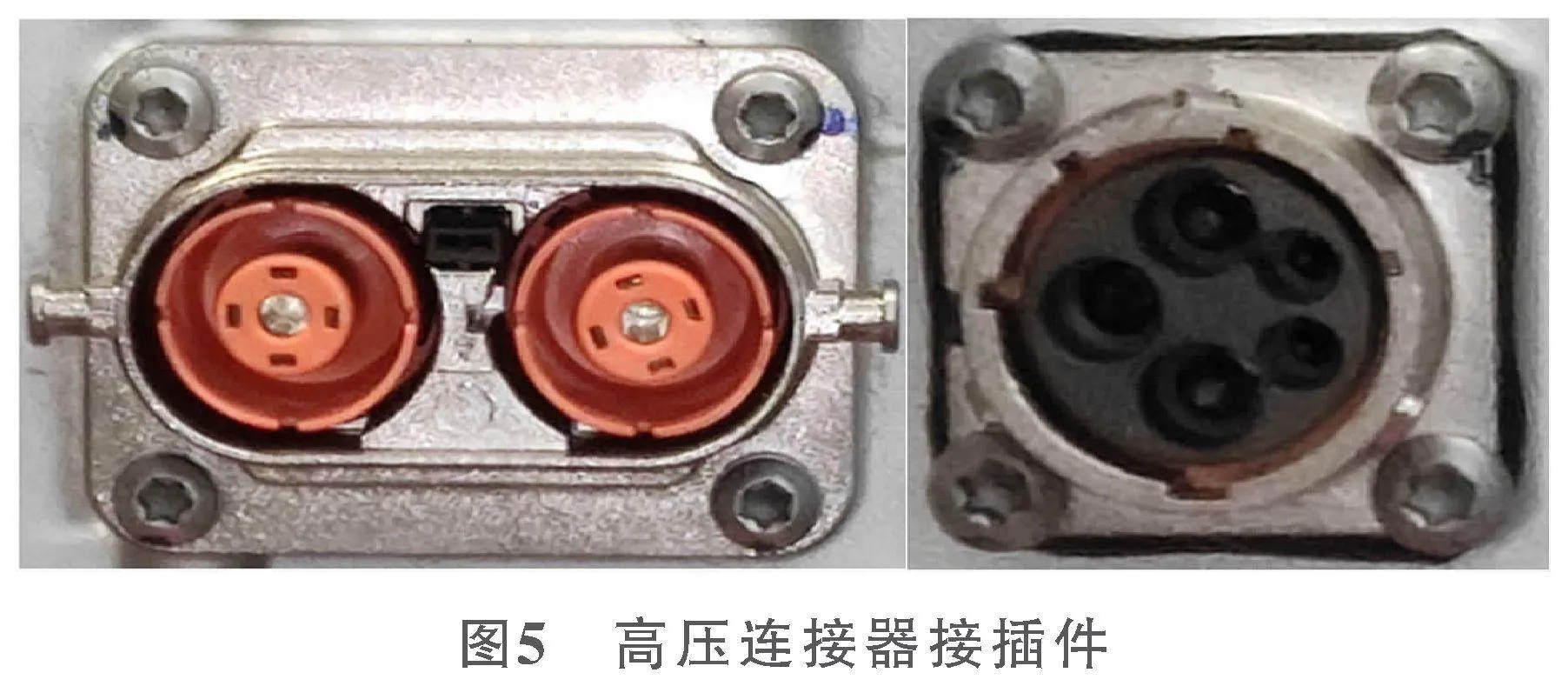
本文所涉及的技術成果已在電動汽車高壓連接器中推廣應用,圖4為某電動汽車電機控制器側視圖,中間橢圓形接口與左右兩側的圓形接口為電機控制器連接高壓電纜的接插口,其內部包含低壓互鎖檢測機構。圖5為高壓連接器的截面圖。目前本文所提出的電動汽車高壓連接器互鎖電路與故障檢測方法已經應用于多型號的電動汽車中。
4 結束語
本文設計的高壓互鎖故障檢測方法,對高壓互鎖接插件反饋的兩路低壓信號實施二階低通與卡爾曼相結合的濾波方式,以此保證所獲得信號的可信度,同時定義高壓互鎖信號波動參數概念,利用該參數來表征電磁干擾對高壓互鎖信號的影響程度,并通過該參數實現高壓互鎖故障閾值的自適應調節,以此解決由于車輛環境中非預期電磁干擾而導致高壓互鎖故障的誤報問題。高壓互鎖檢測電路與故障檢測方法已經在電動汽車中實際推廣應用,技術成果的可靠性與有效性通過了市場驗證。
參考文獻:
[1] 李東,沙文瀚,王飛,等. 基于分級模型的電動汽車高壓電氣策略研究[J]. 汽車電器,2022(2):16-18,21.
[2] 姜點雙,趙久志,秦李偉,等. 電動汽車高壓系統安全防護研究[J]. 汽車制造業,2020(11):38-40.
[3] 李春,張磊,閆肅軍. 電動汽車電安全標準分析及測試[J]. 汽車零部件,2019(9):79-83.
[4] 賈延林,趙璇,周達超. 新能源汽車高壓互鎖故障診斷分析[J]. 汽車實用技術,2024,49(2):55-58.
[5] 譚仕發. 新能源汽車高壓互鎖原理及故障診斷方法研究[J]. 汽車電器,2023(1):21-22,27.
[6] 李瑋,王晶. 純電動汽車高壓互鎖檢測電路及故障機制[J]. 北京汽車,2020(4):1-4,8.
[7] 左振龍,高京. 高壓互鎖回路原理及常見故障排查[J]. 上海汽車,2020(5):15-18.
[8] 周霖,成瀚. 基于某款新能源車的高壓互鎖研究及故障排除[J]. 汽車電器,2021(3):69-71.