車身控制模塊手剎信號丟失故障分析
2024-12-09 00:00:00姚金平
汽車電器 2024年11期



【摘 要】文章針對車輛拉手剎后熄火,再次發動時不顯示駐車制動燈的問題,對故障件進行深入測試,從理論分析和實際測試兩方面分析出組合儀表無法顯示駐車制動燈的主要原因,并為此問題提供軟件解決方案。最后經過大量實車測試驗證發現,更改手剎CAN信號處理方式能夠有效解決這一難題。
【關鍵詞】車身控制模塊;CAN信號;軟件更新
中圖分類號:U463.6 文獻標識碼:B 文章編號:1003-8639( 2024 )11-0105-03
Fault Analysis for the Loss of Handbrake Signal in the BCM
【Abstract】This article referring to the problem that the combined instrument can’t display the parking brake light,when pulling the handbrake before turning off then start again, we have conducted extensive tests to its fault. We summarized the main reasons from two aspects, which is theoretical analysis and practical tests. And we proposed a software programme to solve this problem. In the end, the real vehicle test proved that the change the handbrake CAN signal processing method can solve this problem.
【Key words】BCM;CAN signal;software update
車輛車身控制模塊BCM(Body Control Module)的內部電路控制復雜且市場索賠率比較高,大多數的車身控制模塊故障件返回之后故障很難再現,造成査找原因困難、分析過程耗時長等問題。本文針對此問題,對出現的BCM問題進行梳理總結,為后續分析判斷BCM故障問題提供便利。
1 車身控制模塊BCM功能
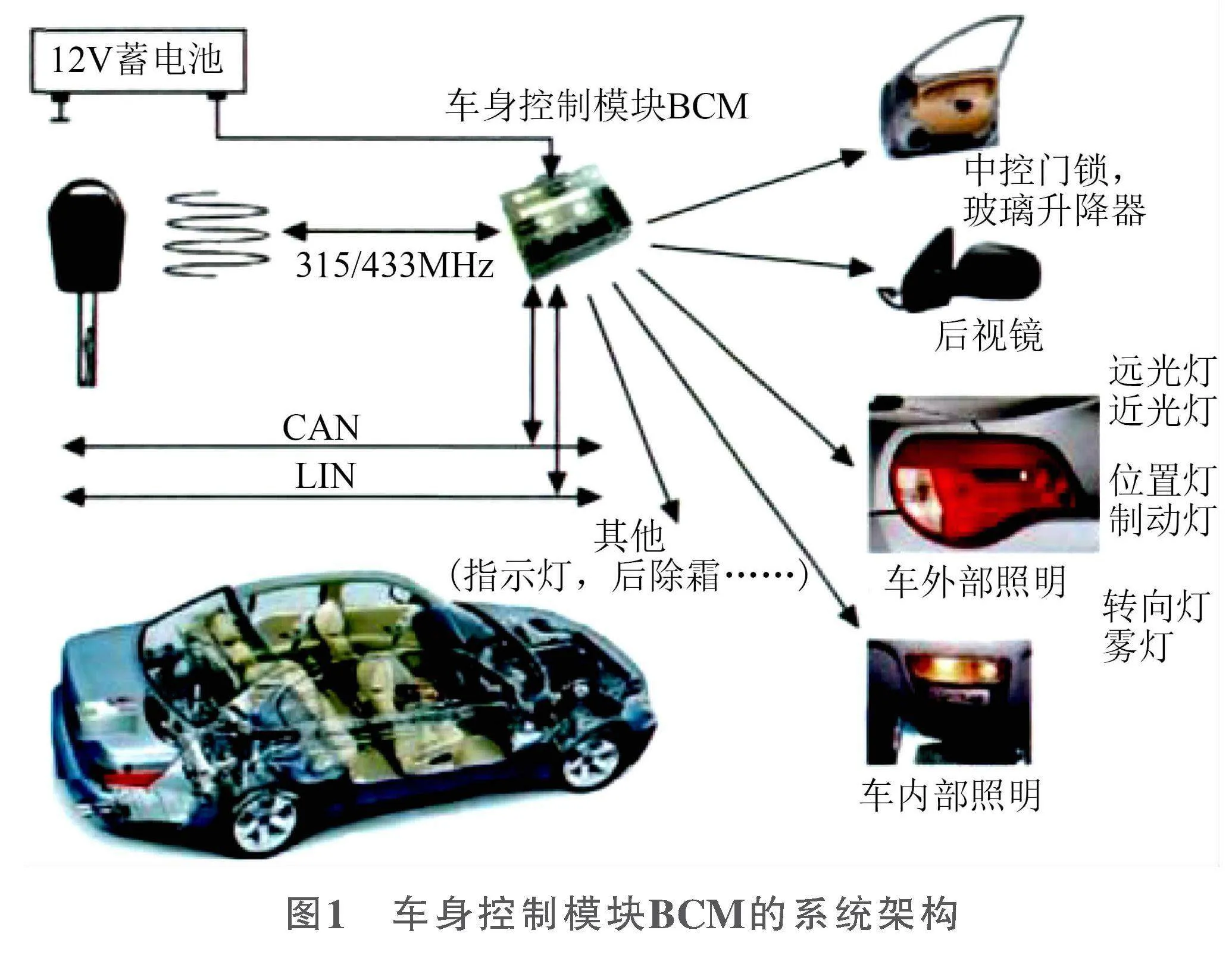
車身控制模塊BCM是一款具有高集成程度的芯片。該裝置的核心控制部件使用高頻的收發器,其功能包括電源分配、對后窗進行加熱、調節玻璃升降、電動后視鏡、中控門鎖、車燈和儀表的背光功能。BCM的內部安裝了繼電器和其他功率設備,這些設備能夠控制較高功率的工作負載[1]。執行負載驅動的部件包括電機、電磁閥和電磁開關,能夠直接處理較大的負載。在中國汽車領域,12V電配置中的車身控制部分使用了線性穩壓,而24V電配置的車身控制部分選擇了開關穩壓器。BCM輸入的電壓區間在 -0.5~32V,而其輸出電壓可以是3.3V或5V。BCM的靜態電流設計應該確保非常低,BCM應有過熱保護且安裝在遠離熱源的地方。車身控制模塊BCM的系統架構如圖1所示,車身上的部件功能可以通過車身控制模塊實現控制,如車燈、車窗、門鎖和室外溫度等相關信息都在車身控制模塊的系統網絡架構中。車輛的各個電子設備間的信息可以共享,且一組信息數據可以同時供給多個部件使用。
車身控制模塊不僅具備基礎功能,還集成了邏輯與用戶友好連接,例如,遙控鎖車將自動關閉窗戶,根據車輛速度和降雨情況自動調整雨刮速度,還有自動感應的前照燈和前照燈自動熄滅等特性。
2 車身控制模塊BCM控制原理
2.1 輸入控制
考慮到負載承受能力和抵抗干擾的實際需求,很多信號數值不適合直接接入微型控制器MCU處理。為了確保信號傳輸的安全與穩定,適當的輸入電路(Input Circuitry)是至關重要的,主要功能是實現信號的隔離和調節。下文以切換信號和脈沖信號為實例進行深入描述。
首先,針對開關信號的輸入,該信號主要通過測量檢測系統與電源正極(+B)或者是接地(GND)的連接狀況確定開關的響應狀況。開關的信號存在兩種狀況:高電平面連接和地線連接。比如,點火開關激活時,BCM接收到的是電源正極(+B)的電信號強度;點火開關不激活時,BCM接收到的信號是懸空的。當車門打開,車門的接觸開關會自動接通,隨后會向BCM發出接地指示;當車門關好后,BCM接收到的信號會呈現懸空的現象,此時的狀態也會改變。信號的這種狀態變化恰好是需要密切注意的信號電壓振幅的主要原因。
脈沖信號輸入屬于關鍵的信號類型,其核心在于具有周期性切換信號的特性。此類信號在解碼器的數據錄入、氣囊的狀態監測和車速信息探測等多個應用領域中有著廣泛的用途[2]。為了保證任何電子系統內部信號的高效傳遞和通信,電子部分的各種接口都需要進行嚴格的軟硬件匹配。車輛的車身控制模塊BCM內的處理電路系統保持了邏輯電平的穩定性。當外部的指令嘗試調整這些邏輯狀態時,這些信號將最終由BCM辨識并加以處理。為了確保信號識別的精準度,通常需要高電平的可靠性高于0.7V,而較低電平則需要低于0.2V。如果輸入電平為這兩種情況之間,MCU可能出現邏輯上的錯誤判斷。另外,過大的開關觸摸電阻有可能引起輸入信號的不同程度變化。
通信接口在車輛內部各電子控制單元以及車體控制組件的長程子模塊間的數據互換方面起到了決定性的作用。基于ISO 11898標準,高速CAN總線(其運行速度可高達1MB/s)采納了雙線容錯差動總線的方法,并展現出廣泛的共模范圍以及差動信號的先進技術,成為汽車內部電子模塊主要的互連總線方式。另一方面,LIN總線支持低速(20kB/s)的單一線路有線網絡,并且主要用來與信息娛樂系統的遠程功能進行通信。通過使用CAN總線以及診斷性插頭等不同接口,有能力實施對通信狀況的監測和檢測。在模擬信號的處理中,A/D轉換技術扮演著重要角色。無論是傳感器提供的降雨量、陽光強度,還是電流信息,如車窗電機的堵轉情況,這些都是用于電壓模擬測量的關鍵指標。在MCU無法直接檢測信號電壓微小的波動時,放大電路便被設計用以增加信號的幅度,以便準確地對信號進行處理。
在當代汽車系統中,射頻識別技術(RFID)同樣扮演著不可或缺的角色,尤其是在遙控式的解鎖系統以及發動機制中的防盜鎖定系統里。制造商會專門為點火開關鑰匙(發動機防盜鎖定系統)提供LFIC加密通信功能,同時也會為UHF(頻率低于1GHz)接收器提供遠程傳輸。這批機器擁有極低的能量消耗特點,能夠對車門和報警系統進行有效的自動鎖定和解鎖,確保車輛的安全和安全。
2.2 輸出控制
在汽車控制模塊BCM內,負載驅動器起到了決定性的作用,這些驅動器主要涵蓋了各種燈具和繼電器的類型[3]。電源的開關和驅動設備負責操控車輛的外部燈,這些部件大部分直接被安裝在控制系統上。繼電器主要用于為高功率負載或其他電子元件供電,確保電力的持續穩定和安全性。汽車整體電池的充電和放電調節以及與其他ECU之間的負荷分配,均是通過BCM系統的電流監控功能來完成的。但是,考慮到MCU的I/O端的承載能力有其局限性,導致許多負荷難以直接由MCU進行控制。為此,有必要選用合適的輸出接口電路作為連接,使得BCM能有效地控制外界負載。
3 CAN信號發送類型
CAN的信號傳輸類型可以主要被劃分為周期型、事件型、重復和混合性質等幾大類。前兩種策略被廣泛采納和應用。
3.1 周期型(Cyclic)信號
周期型信號被稱為信號發射,它是將固定的周期循環數據傳輸到總線上的行為。在下個周期的傳輸節點,將各個周期的更新數據傳送出去。如果數據在周期里有超過兩次更新,那么系統只會發送最新的更新內容。周期型的信號特別適用于數據的高變化頻率或者需要實時同步的信息,每一項參數的輸入都需在預定的時間周期內方可傳送,具體的發送模式如圖2所示。
3.2 事件型(On Change)信號
當信號類型為事件型時,這一信號即事件型發出的信號,并且只有當這些信號值發生改變時,該信號才會被發送至總線。如果數字保持不變,那么總線上不會顯示出這個信號。事件型信號主要針對那些信號變化頻繁的數據,而不需要對數據進行實時同步。僅當輸入參數發生變動時,報文才可能傳遞給CAN總線。如果數據有重復輸入,且參數保持不變,那么報文就不可能再被發送。需要注意,如果在報文生成的最短時間段中設置了多次數據變動,這些會被忽略;然而,如果報文最終被發送,就會發送最后一個接收到的數據數值,其發送模式如圖3所示。
4 BCM手剎信號丟失具體故障分析
4.1 故障現象
車輛拉手剎后熄火,再次點火啟動時組合儀表不顯示駐車制動燈。對故障件進行了大量測試,故障重現率為100%。
4.2 故障車輛數據分析
對該故障車輛進行數據采集[4],當機械手剎拉起,CAN 0x313發送的手剎信號報文為0x2:Locked。當休眠后再次上電,此時機械手剎處于拉起狀態,CAN 0x313發送的手剎信號報文變為0x1:Release。
4.3 原因分析
BCM休眠喚醒時,手剎狀態CAN信號初始化為Release狀態,之后軟件未檢測到手剎開關變化,不會更新手剎狀態值,故喚醒時手剎狀態值保持為Release,導致再次點火啟動時組合儀表不顯示駐車制動燈。
4.4 對策措施
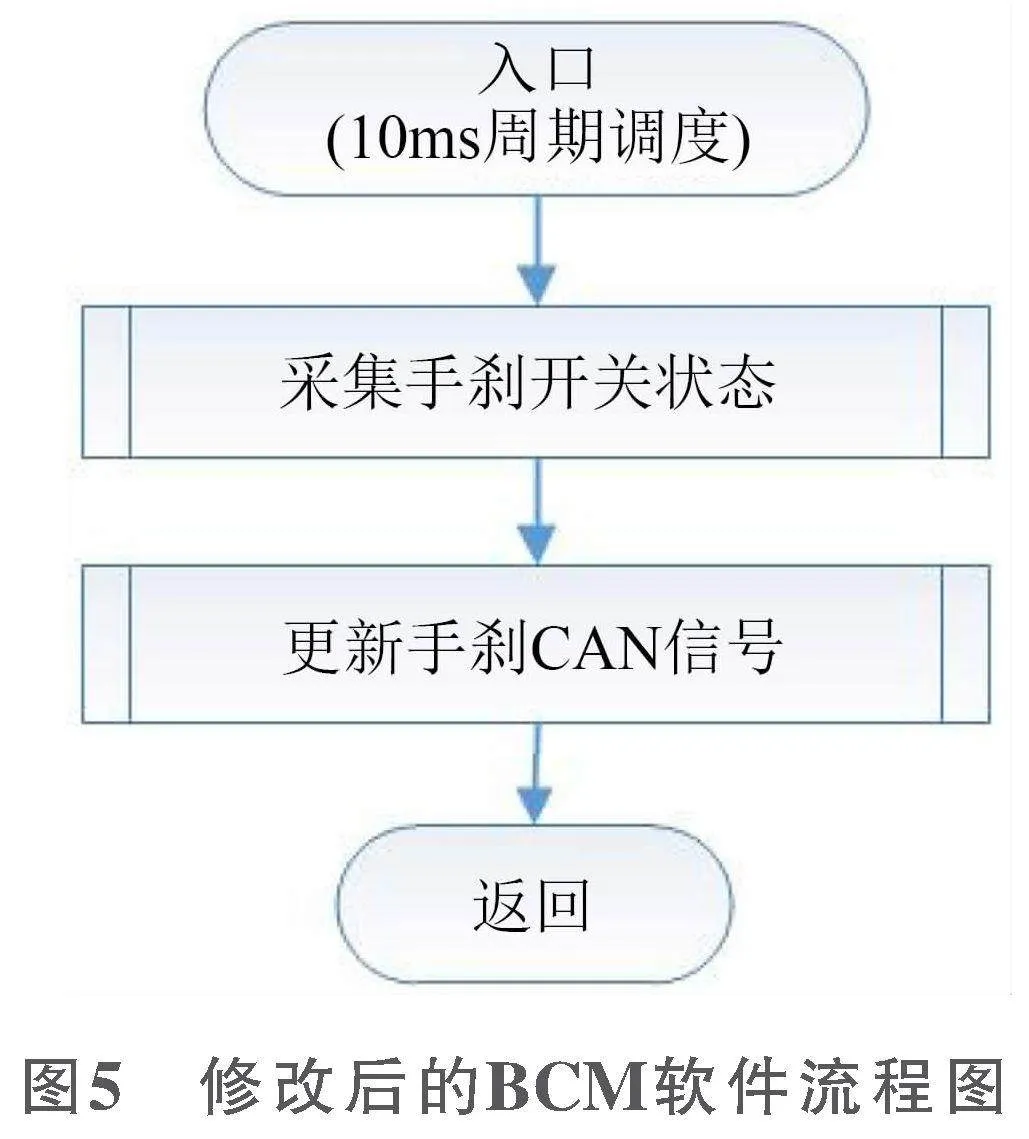
修改BCM軟件,軟件實時讀取手剎開關狀態,無論手剎開關狀態是否有變化,BCM均會更新手剎CAN信號。修改前,手剎CAN信號更新任務采用觸發式處理,修改后手剎CAN信號更新任務采用周期式處理。修改后的BCM軟件內容如圖4所示,修改后的BCM軟件流程圖如圖5所示。
4.5 任務處理方式對比
任務觸發式處理的優點是當開關未變化時,無需進行重復的任務處理,可以減少代碼運行時間,提升CPU運行速率。缺點則是在喚醒后需保持休眠前的狀態。而任務周期式處理的優點是任務周期掃描,不需要保持休眠前的狀態,缺點則是周期執行函數,相同任務會被重復執行,增加CPU運行時間。
5 總結
增加測試用例場景覆蓋,以便測試圍堵問題外流,對BCM觸發式處理會出現問題的輸入開關進行排查,總結出3個條件:①對應的開關類型為自鎖開關;②對應的輸入開關不是喚醒開關;③在喚醒狀態后,對應的輸入開關功能不需要其他前提條件。根據上述3個條件對BCM所有輸入開關進行排查,均更改為周期更新處理方式。對于不同信號發送類型與控制策略的對應分析,在今后的產品研發中可以運用到同類型功能的設計當中,可以更加合理地定義信號發送類型和優化、簡化出更加合理的控制策略。
參考文獻:
[1] 馬建輝,孫常青,郭坤. 汽車BCM的故障診斷設計及實現[J]. 電子產品世界,2017,24(6):43-45.
[2] 汪春華,張玉穩,胡繼康. 基于UDS的車身控制器故障診斷系統設計與實現[J]. 汽車電器,2017(8):41-45.
[3] 侯志成. 一種新型智能功率模塊(IPM)[J]. 現代電子技術,2011(3):171-175.
[4] 山東省科學院自動化研究所. 一種汽車車身控制模塊的故障診斷電路和方法:中國,201610972480.7[P].2016-10-27.