基于蟻群算法的機器人全局路徑規(guī)劃算法改進
2024-12-09 00:00:00姜炳輝
中國新技術(shù)新產(chǎn)品 2024年17期






摘 要:為了解決在復(fù)雜環(huán)境中果園噴霧機器人全局路徑規(guī)劃效率不高的問題,本文提出一種新的路徑規(guī)劃算法。本算法利用蟻群算法的基本原理進行優(yōu)化,引入高度矩陣對啟發(fā)函數(shù)進行優(yōu)化。利用角度數(shù)評價函數(shù)、物數(shù)量評價函數(shù)等參數(shù)對信息素增量進行優(yōu)化,在尋徑過程中更高效地躲避障礙物,避免進入死循環(huán),同時減少迭代次數(shù);設(shè)定信息素濃度值的最大值和最小值,可以避免算法早熟和停滯。本文進行對比測試,測試結(jié)果表明,與基本蟻群算法相比,使用本文算法,最優(yōu)路徑減少7.896 m,迭代次數(shù)降低23次,運行時間減少18.195 s,環(huán)境越復(fù)雜,本文算法的優(yōu)勢越明顯。
關(guān)鍵詞:復(fù)雜環(huán)境;果園機器人;路徑規(guī)劃;信息素增量
中圖分類號:TP 242" " " " " " " 文獻標(biāo)志碼:A
水果產(chǎn)業(yè)在農(nóng)業(yè)生產(chǎn)中的地位越來越重要[1]。為了減少果園生產(chǎn)管理的負(fù)擔(dān),降低生產(chǎn)作業(yè)成本,使用果園噴霧機器人噴灑農(nóng)藥可以降低人力成本[2]。國內(nèi)外學(xué)者對路徑規(guī)劃領(lǐng)域研究越來越多,應(yīng)用比較廣泛的路徑規(guī)劃方法有A*算法、DWA以及蟻群算法等。采用A*算法在一定程度上可以得到較好的路徑規(guī)劃,但是該算法存在拐點大、平滑性不足和運算時間長的問題。DWA算法可以對局部路徑進行規(guī)劃,避障效果很好,但是該算法存在局部最優(yōu)死循環(huán),會導(dǎo)致整個路徑規(guī)劃失敗。蟻群算法的基本原理是模擬螞蟻覓食的行為,對起點至終點進行路徑規(guī)劃[3]。蟻群算法的優(yōu)點包括正反饋高、魯棒性強等,但是該算法的缺點是初期搜索效率不高,算法整體收斂速度慢,還存在局部最優(yōu)解。因此,本文提出一種新的路徑規(guī)劃算法,對傳統(tǒng)的蟻群算法進行改進,在啟發(fā)函數(shù)中引入1個重要的參數(shù),這個參數(shù)是高度信息,同時對信息素模型進行優(yōu)化,利用動態(tài)揮發(fā)系數(shù)得到最佳的路徑規(guī)劃。
1 環(huán)境建立
路徑規(guī)劃是在特定的環(huán)境中找到起點至終點的最佳路線,如公式(1)所示。
min f(e),e∈λ(es,eo)" " " " " " " "(1)
式中:f(e)為路徑的目標(biāo)函數(shù);es為起點;eo為終點;
λ(es,eo)為2個點之間的路徑點集合。
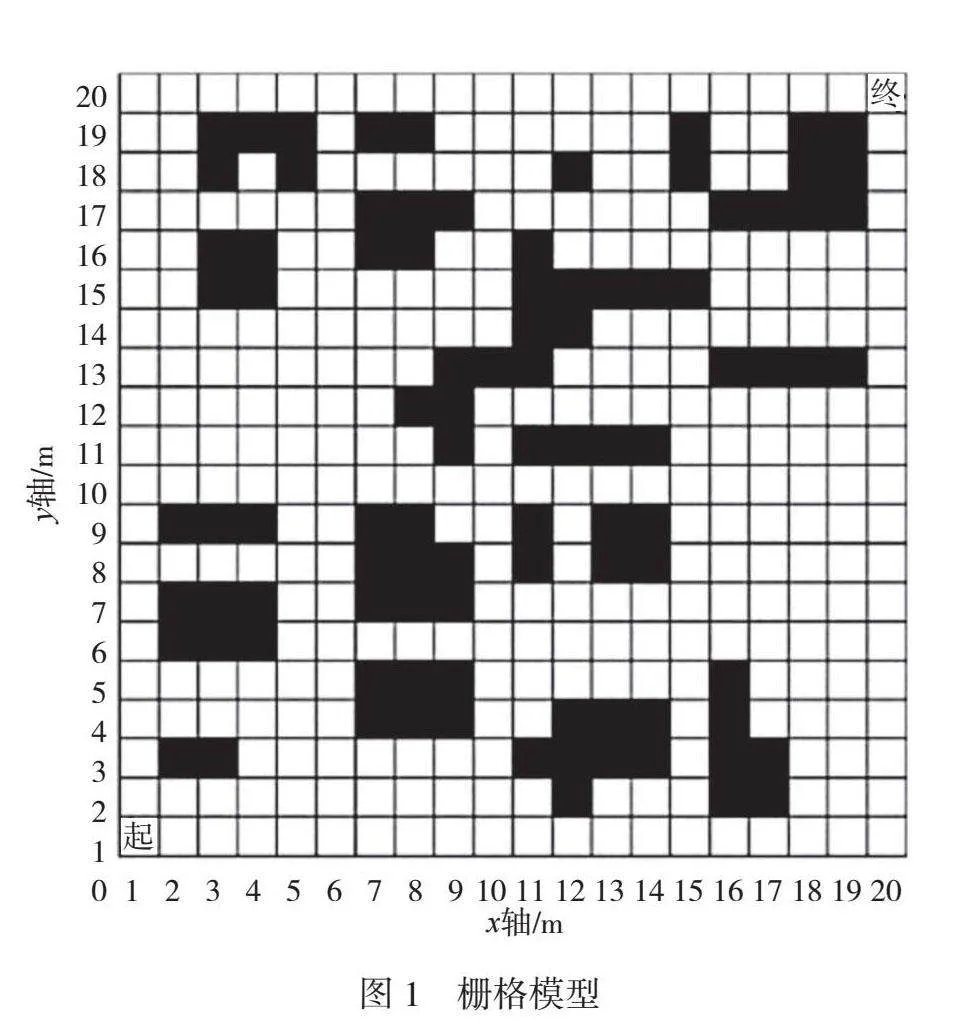
常用的路徑規(guī)劃工具主要有柵格地圖、三維仿真地圖等,三維仿真地圖不易構(gòu)建且維護較難,柵格地圖便于構(gòu)建,精度高,維護簡單,因此本文使用柵格地圖作為果園噴霧機器人的工作環(huán)境空間,柵格模型如圖1所示。
柵格的粒徑大小是由機器人的規(guī)格和型號決定的,需要保證移動機器人可以自由移動,同時,還必須保證兩者之間有安全距離。在尋跡過程中,設(shè)定機器人不可以沿著障礙物邊緣以及頂點移動。當(dāng)柵格中的障礙物填不滿1個柵格時,將這個柵格認(rèn)定為1個柵格。在圖1中,白色柵格是自由柵格,路徑規(guī)劃可以自由使用,黑色柵格是障礙物,在果園噴霧機器人路徑規(guī)劃的過程中可以利用白色柵格避開黑色柵格,在柵格中,X方向的柵格號的順序為從左到右,Y方向的柵格號的順序為從下到上,左下角為起點,右上角為終點[4]。
每個柵格與其中心左邊的關(guān)系如公式(2)、公式(3)所示。
(2)
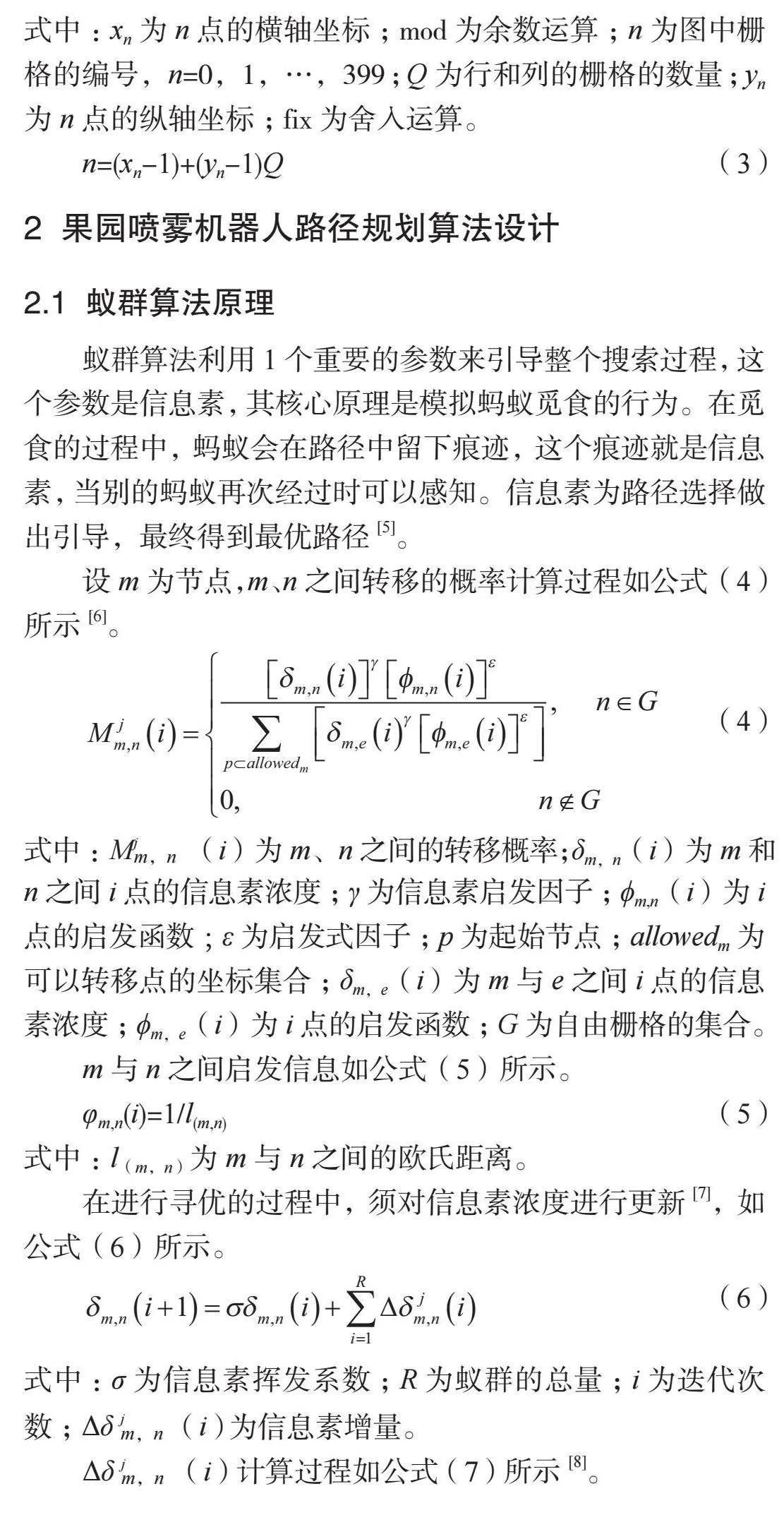
式中:xn為n點的橫軸坐標(biāo);mod為余數(shù)運算;n為圖中柵格的編號,n=0,1,…,399;Q為行和列的柵格的數(shù)量;yn為n點的縱軸坐標(biāo);fix為舍入運算。
n=(xn-1)+(yn-1)Q " " " " " " (3)
2 果園噴霧機器人路徑規(guī)劃算法設(shè)計
2.1 蟻群算法原理
蟻群算法利用1個重要的參數(shù)來引導(dǎo)整個搜索過程,這個參數(shù)是信息素,其核心原理是模擬螞蟻覓食的行為。在覓食的過程中,螞蟻會在路徑中留下痕跡,這個痕跡就是信息素,當(dāng)別的螞蟻再次經(jīng)過時可以感知。信息素為路徑選擇做出引導(dǎo),最終得到最優(yōu)路徑[5]。
設(shè)m為節(jié)點,m、n之間轉(zhuǎn)移的概率計算過程如公式(4)所示[6]。
(4)
式中:Mj (i)為m、n之間的轉(zhuǎn)移概率;δm,n(i)為m和n之間i點的信息素濃度;γ為信息素啟發(fā)因子;?m,n(i)為i點的啟發(fā)函數(shù);ε為啟發(fā)式因子;p為起始節(jié)點;allowedm為可以轉(zhuǎn)移點的坐標(biāo)集合;δm,e(i)為m與e之間i點的信息素濃度;?m,e(i)為i點的啟發(fā)函數(shù);G為自由柵格的集合。
m與n之間啟發(fā)信息如公式(5)所示。
φm,n(i)=1/l(m,n) " " " " " " " " "(5)
式中:l(m,n)為m與n之間的歐氏距離。
在進行尋優(yōu)的過程中,須對信息素濃度進行更新[7],如公式(6)所示。
(6)
式中:σ為信息素?fù)]發(fā)系數(shù);R為蟻群的總量;i為迭代次數(shù);Δδj (i)為信息素增量。
Δδj (i)計算過程如公式(7)所示[8]。
(7)
式中:D為信息素強度;Lj為路徑總長度;W為尋優(yōu)過程中路過的總柵格的集合;otherwise為其他情況。
2.2 改進啟發(fā)函數(shù)
在傳統(tǒng)的算法中,啟發(fā)函數(shù)只考慮了路徑長度這個參數(shù),在運行過程中只能解決環(huán)境中的距離問題。但是,在實際工作中,果園噴霧機器人須考慮環(huán)境高度問題,傳統(tǒng)的啟發(fā)函數(shù)并沒有涉及這個問題,機器人在進行路徑規(guī)劃的過程中就會出現(xiàn)無法適應(yīng)真實工作環(huán)境中高度不定的情況,因此需要進一步改進,如公式(8)所示。
φ(m,n)=l(m,n)-1+μ(i,j) " " " " " " " " (8)
式中:φ(m,n)為m點至n點的啟發(fā)函數(shù);l(m,n)為m點至n點的距離信息;μ為高度,μ(i,j)為高度函數(shù)。同時可以表示其多元函數(shù),如公式(9)所示[9]。
(9)
式中:gmax為相鄰2個柵格的最大差值;g(m)為m點的高度信息;g(n)為n點的高度信息;η、β為可以進行高度調(diào)節(jié)的常數(shù);gmin為2個柵格的最小差值;C為常量,C的值在通常情況下為0.001。
2.3 信息素增量更新規(guī)則改進
在通常情況下,果園的環(huán)境是非常復(fù)雜的,當(dāng)尋徑時需要考慮拐角的因素,這樣才能減少機器人的功耗,因此引入拐角度數(shù)評價函數(shù)f (θ),如公式(10)所示。
(10)
式中:θ為拐角度數(shù)。
在機器人尋徑的過程中,如果障礙物數(shù)量比較多,就容易陷入死局。因此,引入障礙物數(shù)量評價函數(shù)f(t),這樣能夠提升搜索效率[10],如公式(11)所示。
(11)
式中:t為障礙物數(shù)量,其值設(shè)定在7以下。
在尋徑過程中,這個函數(shù)越小,確定這個節(jié)點的概率越高。
改進后的信息素增量如公式(12)所示。
(12)
式中:α為拐角平衡系數(shù);ψ為障礙物數(shù)量平衡系數(shù)。
2.4 信息素更新規(guī)則改進
在傳統(tǒng)的蟻群算法中,信息素?fù)]發(fā)系數(shù)σ是固定不變的,不但會影響全局搜索能力,而且會影響快速收斂能力。因此,需要使用信息素自適應(yīng)揮發(fā)因子,前期增加σ的值來增加收斂速度,后期降低σ的值使全局搜索能力更強,改進后如公式(13)所示。
(13)
式中:σ(i)為i點的信息素?fù)]發(fā)系數(shù);a、b都為常數(shù),a為信息素持久度常數(shù)的整數(shù)部分,b為信息素持久度常數(shù)的小數(shù)部分。
由公式(13)可知,改進后設(shè)定了信息素濃度值的最大值和最小值,避免出現(xiàn)算法的早熟和停滯,提升了算法的尋優(yōu)效率,因此能夠在[δmin,δmax]表示改進后的信息素濃度,如公式(14)所示。
(14)
2.5 算法實現(xiàn)
改進后的算法主要包括以下5個步驟。第一步,建立柵格地圖,將主要參數(shù)初始化。第二步,設(shè)置螞蟻搜索的起點和終點,清空禁忌表, 設(shè)置開始路徑點集合為空,同時將起點加入禁忌表,螞蟻開始搜索。第三步,利用公式(4)計算轉(zhuǎn)移概率,根據(jù)公式(9)和公式(12)得到下個節(jié)點的坐標(biāo),更新路徑長度。繼續(xù)這個循環(huán),直至螞蟻到達終點。第四步,根據(jù)公式(13)、公式(14)更新信息素濃度,同時設(shè)置信息素濃度的最大值和最小值。第五步,判斷迭代次數(shù)的數(shù)量,如果迭代次數(shù)小于最大值,那么迭代次數(shù)加1,繼續(xù)從第二步執(zhí)行,如果迭代次數(shù)大于最大值,那么輸出最優(yōu)路徑。
3 測試結(jié)果
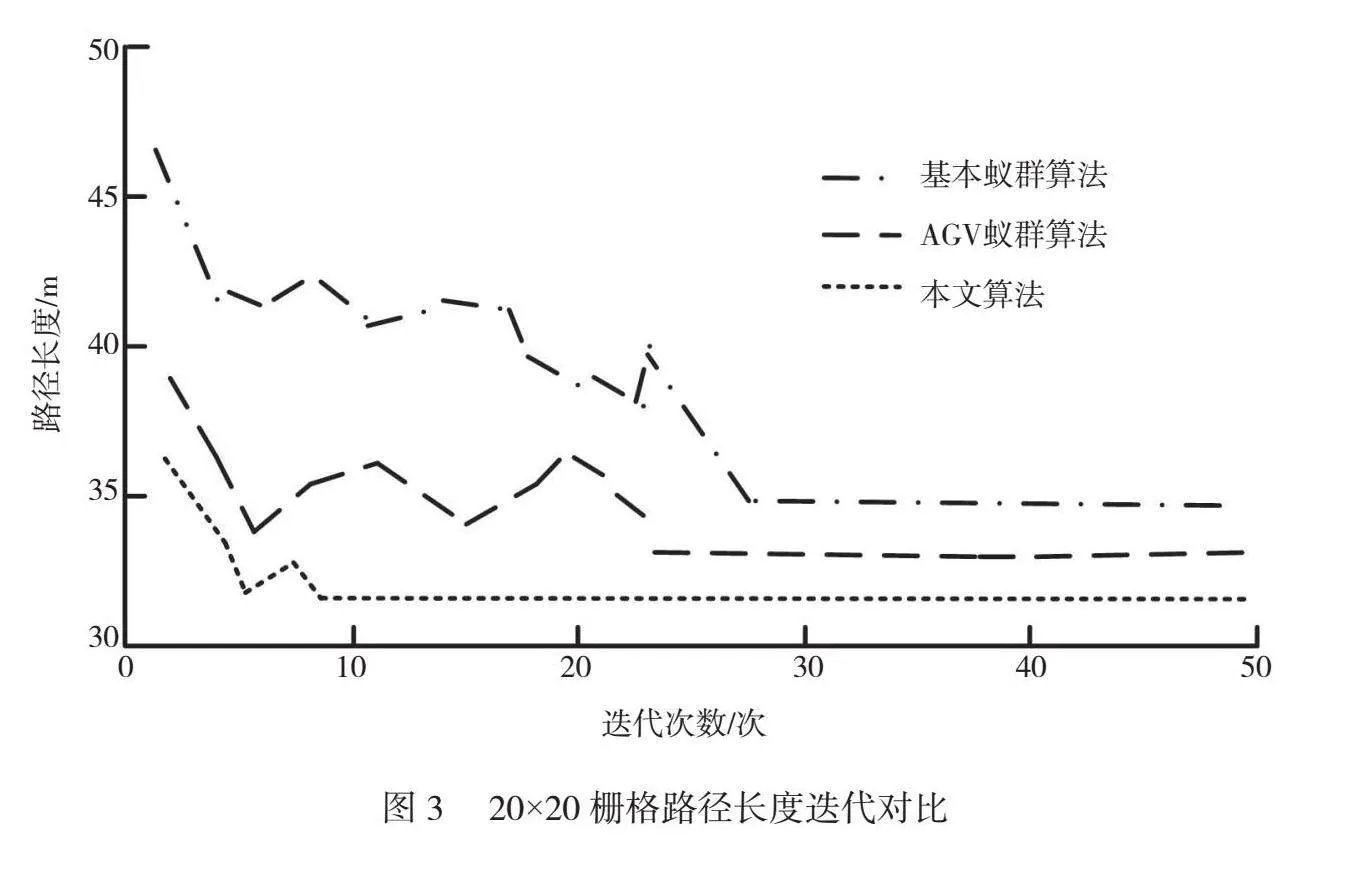
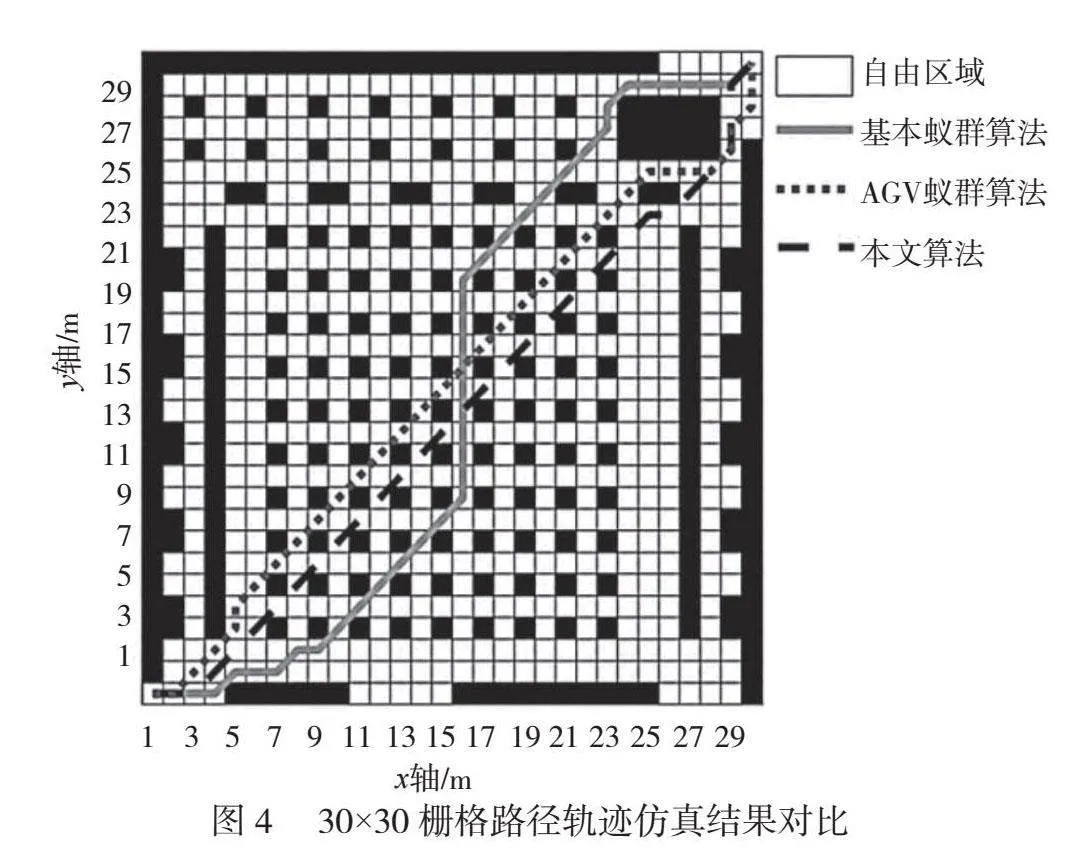
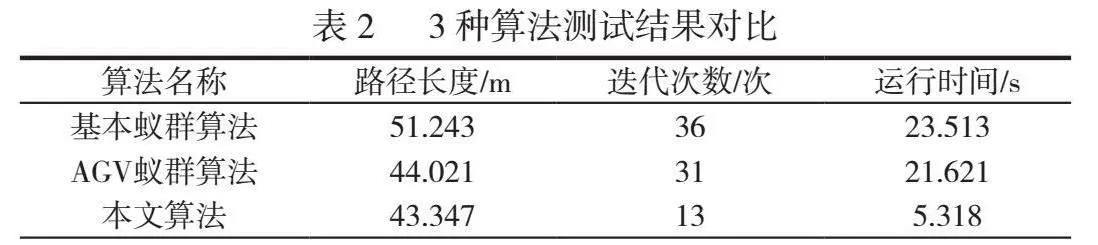
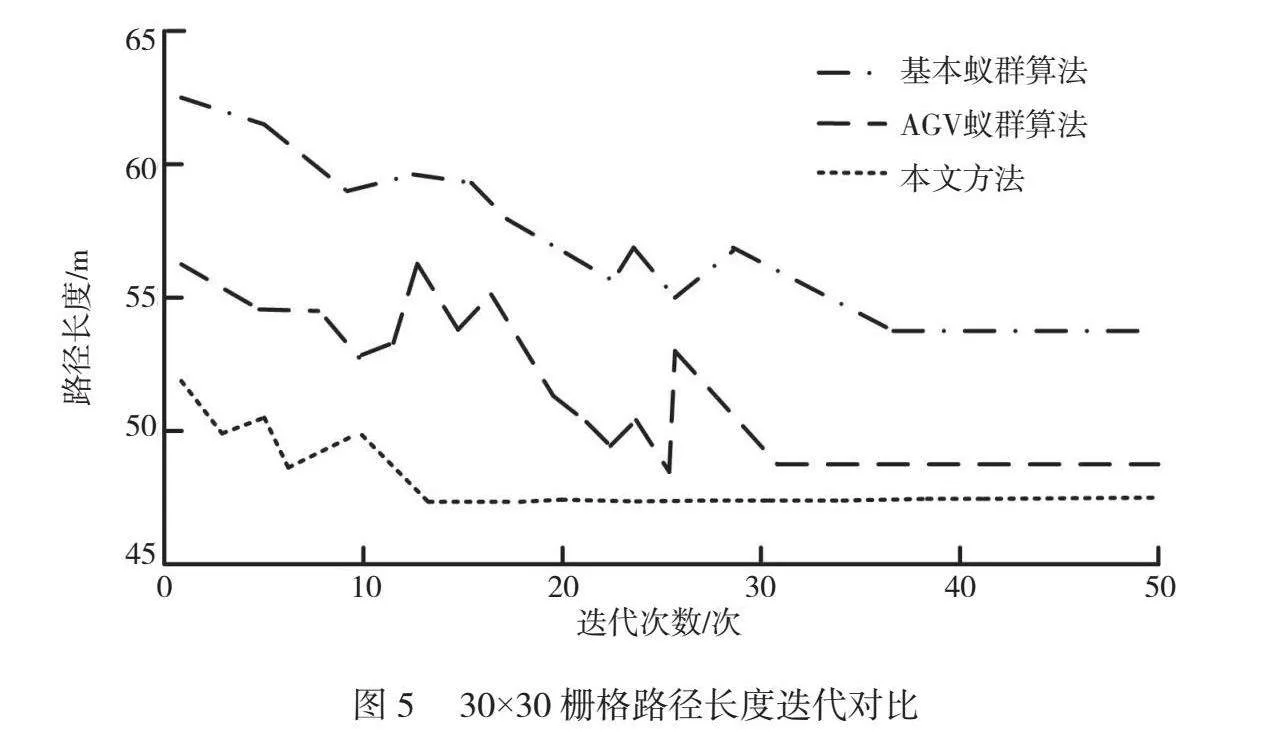
為了驗證本文算法的正確性,本文利用Matlab進行一系列對比測試,不僅對20×20柵格進行測試,還對更復(fù)雜的30×30柵格進行測試,20×20柵格路徑軌跡仿真結(jié)果對比如圖2所示,20×20 柵格路徑長度迭代對比如圖3所示,30×30柵格路徑軌跡仿真結(jié)果如圖4所示,30×30柵格路徑長度迭代對比如圖5所示,3種算法測試結(jié)果對比見表1、表2。
由圖2~圖5、表1和表2可知,采用3種算法都可以順利到達終點,基本蟻群算法迭代次數(shù)最多,路徑也最長。雖然AGV蟻群算法的路徑有所縮短,但是沒有考慮果園環(huán)境的復(fù)雜程度,在尋找最優(yōu)路徑的過程中需要更多的迭代次數(shù),容易陷入死循環(huán)。由于地面高低不平,因此本文算法引入高度矩陣、角度數(shù)評價函數(shù)以及物數(shù)量評價函數(shù)等參數(shù),不僅最優(yōu)路徑最短,而且迭代次數(shù)減少,避免死循環(huán),在30×30柵格環(huán)境中,本文的優(yōu)勢更加明顯。
為了進一步驗證本文算法的優(yōu)勢,對更復(fù)雜的30×30柵格環(huán)境使用所尋路徑對環(huán)境的覆蓋這個參數(shù)進行量化分析,如公式(15)所示。
(15)
式中:ζ為所尋路經(jīng)對環(huán)境的覆蓋率;QP為尋徑過程中檢測到的方格數(shù)量;Qf為自由方格數(shù)。
使用公式(15)對3種算法的所尋路徑對環(huán)境的覆蓋進行計算,基本蟻群算法的計算結(jié)果為57.69%,AGV蟻群算法計算結(jié)果為71.25%,而本文算法可達到79.36%,計算結(jié)果越大就證明在進行最優(yōu)路徑搜索的范圍越廣,進一步證明的本文算法的優(yōu)勢。
4 結(jié)論
本文研究復(fù)雜環(huán)境中果園噴霧機器人全局路徑規(guī)劃方法,該算法對傳統(tǒng)的蟻群算法進行改進,引入高度矩陣、拐角平衡系數(shù)和障礙物數(shù)量平衡系數(shù)等參數(shù)對啟發(fā)函數(shù)、信息素增量更新規(guī)則和信息素濃度更新規(guī)則進行優(yōu)化。由測試結(jié)果可知,不僅最優(yōu)路徑最短,而且減少迭代次數(shù),縮短算法運行時間,避免死循環(huán)。在30×30柵格環(huán)境中,與傳統(tǒng)的蟻群算法相比,尋優(yōu)路徑對環(huán)境的覆蓋率可以提高21.67%。
參考文獻
[1]王超,王銀花.一種改進Dijkstra算法的UAV路徑規(guī)劃[J].信息技術(shù)與信化,2021(10):217-219.
[2]卞強,孫齊,童余德.一種新的改進A算法無人機三維路徑規(guī)劃[J].武漢理工大學(xué)學(xué)報,2022,44(7):80-88.
[3]王洪斌,郝策,張平,等.基于A~*算法和人工勢場法的移動機器人路徑規(guī)劃[J].中國機械工程,2019,30(20):2489-2496.
[4]張麗珍,何龍,吳迪,等.改進型蟻群算法在路徑規(guī)劃中的研究[J].制造業(yè)自動化,2020,42(2):55-59.
[5]楊嘉,劉虎,楊新坤,等.基于遺傳算法的移動機器人路徑規(guī)劃[J].機電工程技術(shù),2020,49(12):97-98,117.
[6]劉志海,薛媛,周晨,等.基于遺傳算法的機器人路徑規(guī)劃的種群初始化改進[J].機床與液壓,2019,47(21):5-8.
[7]徐國生,徐祖永,周俊杰,等.基于遺傳算法的巡檢機器人路徑規(guī)劃算法的研究[J].機械設(shè)計與制造工程,2021,50(6):93-98.
[8]宋啟松,李少波,柘龍炫,等.基于改進遺傳算法的自動導(dǎo)引小車路徑規(guī)劃[J].組合機床與自動化加工技術(shù),2020(7):88-92.
[9]YANG K,YOU X M,LIU S,et al.A novel ant colony optimization
based on game for traveling salesman problem[J].Applied Intelligence,2020,50(12):4529-4542.
[10]SANGEETHA V,KRISHANKUMAKR R,RAVICH AND
R ,et al.Energy- efficient green ant colony optimization for path planning in dynamic 3D environments[J].Soft computing,2021,25(6):4749-4769.