改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)導(dǎo)航在無人機(jī)巡線中的應(yīng)用
2024-12-10 00:00:00李耀魏帥齊王文
中國新技術(shù)新產(chǎn)品 2024年19期




摘 要:為了消除無人機(jī)導(dǎo)航系統(tǒng)的誤差,本文設(shè)計(jì)了改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng),基于Kalman算法對GNSS和SINS這2種導(dǎo)航數(shù)據(jù)進(jìn)行融合。在GNSS信號缺失的情況下,改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)來預(yù)測缺失部分的數(shù)據(jù),再結(jié)合SINS的數(shù)據(jù)對無人機(jī)的位置進(jìn)行精準(zhǔn)預(yù)測。算法設(shè)計(jì)完成后,運(yùn)用MATLAB軟件模擬驗(yàn)證系統(tǒng)算法的功能。結(jié)果顯示,其位置預(yù)測數(shù)據(jù)精度良好,證明該系統(tǒng)能夠提升無人機(jī)的導(dǎo)航效果。
關(guān)鍵詞:GNSS/SINS組合導(dǎo)航系統(tǒng);改進(jìn)灰色神經(jīng)網(wǎng)絡(luò);無人機(jī)電力巡線
中圖分類號:TN 967" " " 文獻(xiàn)標(biāo)志碼:A
全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)和捷聯(lián)慣導(dǎo)系統(tǒng)(Strapdown Inertial Navigation System,SINS)是電力巡線無人機(jī)的主要導(dǎo)航方式,GNSS導(dǎo)航精度高,但是容易受到復(fù)雜地形和電磁因素的干擾,導(dǎo)致信號缺失;SINS導(dǎo)航精度較差,但是幾乎不受其他因素影響。整合以上2種導(dǎo)航方式,能夠彌補(bǔ)各自的缺陷,進(jìn)一步提高導(dǎo)航精度。本文針對GNSS容易出現(xiàn)數(shù)據(jù)間歇性缺失的問題,創(chuàng)新性地引入改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)模型,預(yù)測缺失部分的數(shù)據(jù),建立GNSS/SINS組合導(dǎo)航技術(shù),顯著降低無人機(jī)的導(dǎo)航誤差。
1 GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng)設(shè)計(jì)
1.1 導(dǎo)航系統(tǒng)整體架構(gòu)
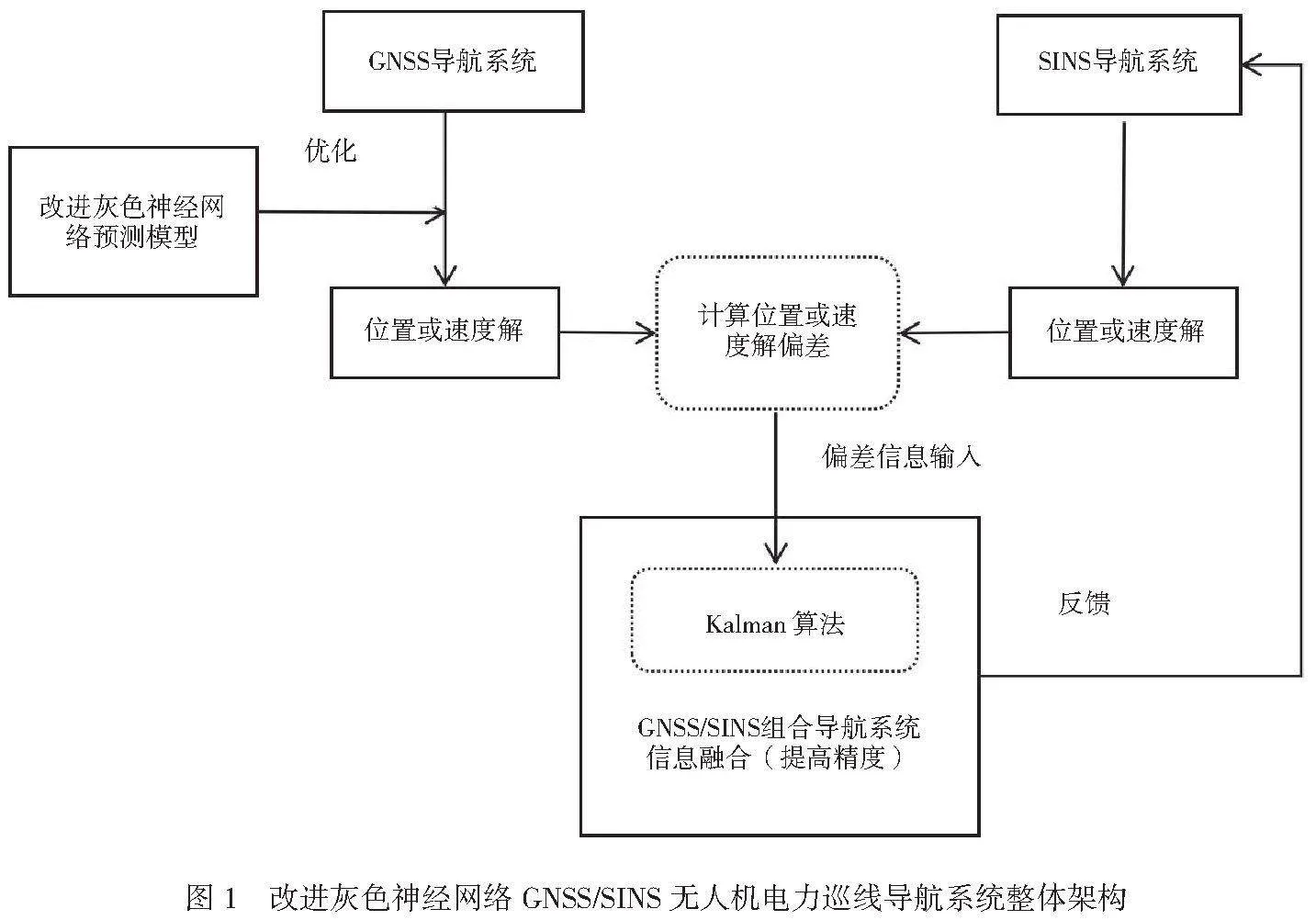
無人機(jī)電力巡線作業(yè)系統(tǒng)主要采用2種導(dǎo)航定位技術(shù),分別為GNSS和SINS。GNSS導(dǎo)航系統(tǒng)能夠?yàn)闊o人機(jī)提供長時(shí)間、大范圍的導(dǎo)航服務(wù)。SINS導(dǎo)航系統(tǒng)無須依賴外部系統(tǒng),能夠自主完成導(dǎo)航任務(wù)。這2類導(dǎo)航系統(tǒng)各自存在一定的局限性,GNSS受到山地復(fù)雜環(huán)境的干擾,容易出現(xiàn)信號中斷的情況[1]。SINS導(dǎo)航精度較差,誤差會不斷累積。
本文設(shè)計(jì)的改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng)對GNSS和SINS進(jìn)行整合,利用算法工具提高整體的導(dǎo)航精度,整體架構(gòu)如圖1所示。
1.2 基于改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)模型的GNSS導(dǎo)航優(yōu)化
在無人機(jī)電力巡線過程中,GNSS導(dǎo)航系統(tǒng)受到復(fù)雜環(huán)境干擾,有可能出現(xiàn)短時(shí)信號缺失的情況,導(dǎo)致GNSS/SINS組合導(dǎo)航系統(tǒng)不能進(jìn)行信息融合。在這個(gè)情況下,可以改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)模型預(yù)測缺失的信號,保證后續(xù)信息融合模塊正常運(yùn)行。
1.2.1 改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)預(yù)測模型整體架構(gòu)
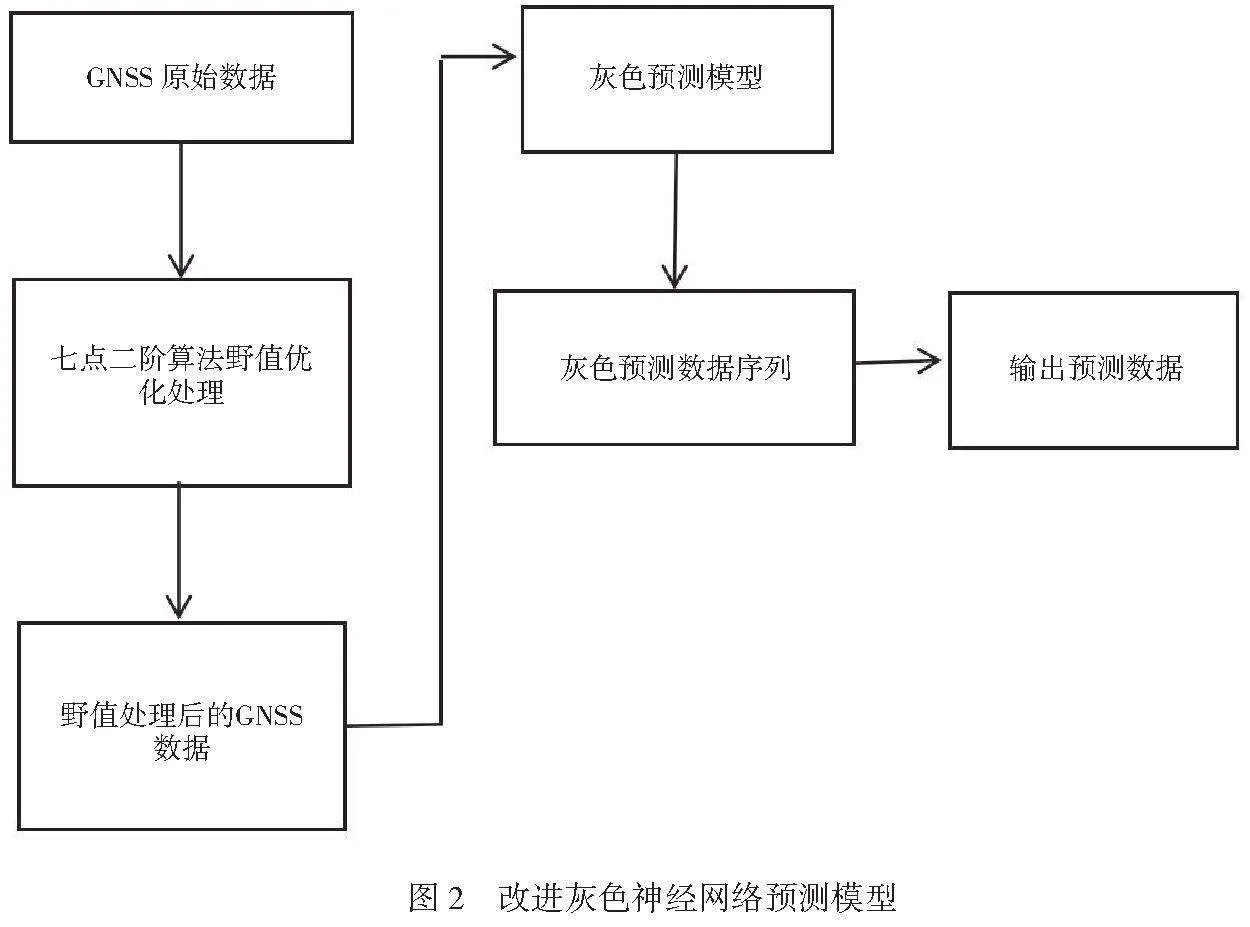
改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)預(yù)測模型融合七點(diǎn)二階算法和灰色預(yù)測模型(Grey Models,GM)。GNSS系統(tǒng)利用接收天線采集原始數(shù)據(jù)后,根據(jù)七點(diǎn)二階算法處理原始數(shù)據(jù),再使用改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)預(yù)測模型進(jìn)行缺失數(shù)據(jù)預(yù)測,模型如圖2所示。
1.2.2 改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)預(yù)測模型設(shè)計(jì)
1.2.2.1 基于七點(diǎn)二階算法的野值優(yōu)化
野值是GNSS原始數(shù)據(jù)中的離散值,其特點(diǎn)為明顯偏離正常范圍,野值的存在降低了原始數(shù)據(jù)的平滑性和預(yù)測模型的精度[2]。基于此,利用七點(diǎn)二階算法對原始數(shù)據(jù)進(jìn)行處理,剔除原始數(shù)據(jù)中的離散值,增強(qiáng)原始數(shù)據(jù)的平滑性,提升模型的預(yù)測精度,該算法判斷野值的步驟如下。
將GNSS系統(tǒng)采集的原始數(shù)據(jù)記為yi,i=7,8,...,n。i初始取值為7,原始數(shù)據(jù)中的前6項(xiàng)分別為yi-6、yi-5、yi-4、yi-3、yi-2和yi-1。采用七點(diǎn)二階算法對原數(shù)據(jù)進(jìn)行插值處理,如公式(1)所示。
yi'=(5yi-6-3yi-5-6yi-4+3yi-2+15yi-1+32yi)/42" (1)
式中:yi'為yi對應(yīng)的插值。
野值的判斷條件如公式(2)所示。
式中:yk為第k個(gè)采樣時(shí)刻或數(shù)據(jù)點(diǎn)的觀測值,由于i=k-6,因此yk對應(yīng)原始數(shù)據(jù)集中的yi+6;yk'為yk對應(yīng)的插值處理結(jié)果;k為當(dāng)前處理的數(shù)據(jù)點(diǎn)的位置或時(shí)間步;i為索引,其作用是表示迭代或循環(huán)過程中的不同位置;yi為在特定范圍內(nèi)第i個(gè)數(shù)據(jù)點(diǎn)的觀測值;yi'為該觀測值的映射;E為辨識常數(shù)。當(dāng)yk滿足公式(2)時(shí),屬于野值,應(yīng)該予以剔除。
1.2.2.2 基于灰色預(yù)測模型獲取灰色預(yù)測數(shù)據(jù)序列
GNSS系統(tǒng)的原始數(shù)據(jù)有可能出現(xiàn)缺失,可以根據(jù)前期獲得的數(shù)據(jù)預(yù)測缺失的部分。將野值處理后的GNSS原始數(shù)據(jù)輸入灰色預(yù)測模型中,利用累加生成操作(Accumulated Generating Operation,AGO)進(jìn)行預(yù)測,獲取灰色預(yù)測數(shù)據(jù)序列[3]。
將輸入灰色預(yù)測模型的原始數(shù)據(jù)集記為X(0),X(0)={X(0) (1),X(0) (2),...,X(0) (n)},X(0) (n)為集合X(0)中的元素。根據(jù)灰色預(yù)測模型的相關(guān)原理計(jì)算X(0)的預(yù)測序列,如公式(3)所示。
式中:Xp(0)(k+1)為預(yù)測值,k=1,2,3,...,n。將k代入公式(3),得到對應(yīng)的預(yù)測數(shù)據(jù)序列。a為發(fā)展系數(shù);b為灰作用量。
1.3 基于Kalman算法的GNSS/SINS導(dǎo)航信息融合
由GNSS/SINS組合導(dǎo)航系統(tǒng)的工作原理可知,GNSS導(dǎo)航系統(tǒng)和SINS導(dǎo)航系統(tǒng)均可以產(chǎn)生無人機(jī)的位置解和速度解,但是2種導(dǎo)航系統(tǒng)的輸出結(jié)果通常存在一定偏差。基于改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)的GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng)可以對2類系統(tǒng)輸出結(jié)果進(jìn)行融合,提升導(dǎo)航精度。信息融合方法如下。
1.3.1 SINS導(dǎo)航系統(tǒng)誤差
Kalman濾波算法能夠根據(jù)輸入數(shù)據(jù)估算系統(tǒng)的最佳運(yùn)行狀態(tài)。將GNSS導(dǎo)航系統(tǒng)與SINS導(dǎo)航系統(tǒng)輸出結(jié)果的差值輸入Kalman濾波算法程序中,根據(jù)算法程序?qū)?shù)據(jù)進(jìn)行融合處理,提升組合系統(tǒng)的導(dǎo)航精度。當(dāng)預(yù)測系統(tǒng)狀態(tài)時(shí),該算法須利用SINS導(dǎo)航系統(tǒng)的誤差構(gòu)建GNSS/SINS組合導(dǎo)航系統(tǒng)的狀態(tài)轉(zhuǎn)移方程。
SINS解算機(jī)械編排獲取載體的位置坐標(biāo),受到傳感器和機(jī)械編排的影響,SINS系統(tǒng)有可能出現(xiàn)誤差。將系統(tǒng)導(dǎo)航坐標(biāo)與實(shí)際導(dǎo)航坐標(biāo)之間的失準(zhǔn)角向量記為φ,φ=[φN" φE" φD]T,其中φN、φE和φD為NED坐標(biāo)系中N軸、E軸和D軸對應(yīng)的失準(zhǔn)角分量[4]。根據(jù)失準(zhǔn)角構(gòu)建實(shí)際姿態(tài)矩陣和理想無誤差姿態(tài)矩陣的方程,兩側(cè)同時(shí)進(jìn)行微分,計(jì)算失準(zhǔn)角的誤差方程,如公式(4)所示。
φ'=-ωn in×φ+δωn in-Cbnδωb ib (4)
式中:φ'為含誤差的失準(zhǔn)角;ωn in為慣性坐標(biāo)系i相對導(dǎo)航坐標(biāo)系n的轉(zhuǎn)動角速度在n系中的矢量;δ為實(shí)際物理量與理想物理量之間的誤差;Cbn為無誤差情況下的導(dǎo)航系統(tǒng)姿態(tài)矩陣;ωb ib為SINS系統(tǒng)陀螺儀輸出的角速度。對系統(tǒng)計(jì)算速度和理想速度的方程進(jìn)行微分,得到無人機(jī)的速度誤差方程,如公式(5)所示 [5]。
δvn=Cbnδf b+Cbnf b·φ-(2ωien+ωn en)·δvn+vn×(2δωn ie+δωn en)+δgIn
(5)
式中:vn為理想情況無人機(jī)相對地面的速度;δvn為速度誤差;f b為慣性導(dǎo)航中的加表零偏;δf b為加表零偏誤差量;ωn ie為地球自轉(zhuǎn)角速度在導(dǎo)航坐標(biāo)系中的分量;ωn en為導(dǎo)航坐標(biāo)系n相對地心地固坐標(biāo)系e的轉(zhuǎn)動角速度在n系中的矢量;gIn為導(dǎo)航系統(tǒng)中的重力參數(shù)。采用相同的方法對無人機(jī)高程、緯度和經(jīng)度進(jìn)行分析,得到相應(yīng)的誤差方程。以高程為例,其對應(yīng)的誤差方程為δh=-δvD,h為理想高程參數(shù),δh為包括誤差的高程;vD為NED坐標(biāo)系中D軸(垂直于地球表面的坐標(biāo)軸)的速度。
1.3.2 基于SINS誤差的組合導(dǎo)航系統(tǒng)Kalman算法狀態(tài)方程
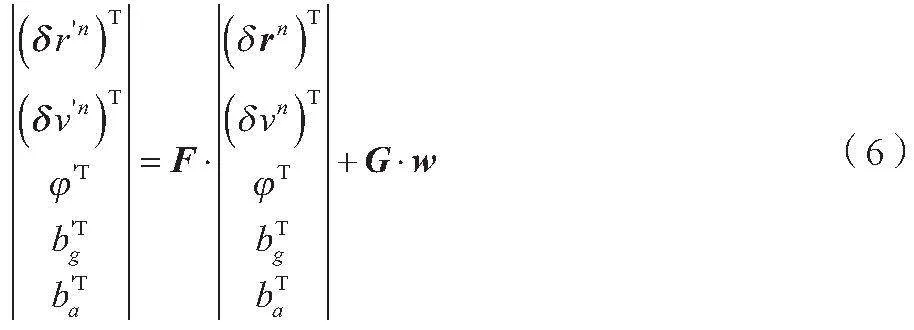
在第1.3.1節(jié)中,對SINS導(dǎo)航系統(tǒng)的誤差分量進(jìn)行分離,包括失準(zhǔn)角、速度、高程、緯度和經(jīng)度,其中緯度、經(jīng)度和高程體現(xiàn)了無人飛行器的位置。以SINS誤差為基礎(chǔ),根據(jù)Kalman算法建立GNSS/SINS組合導(dǎo)航系統(tǒng)的狀態(tài)方程,如公式(6)所示。
式中:δ為誤差系數(shù);δr'n為Kalman算法修正后的位置誤差矩陣;δv'n為Kalman算法修正后速度誤差矩陣;φ'、bg'、ba'、r'n和v'n為參數(shù)φ、bg、ba、rn和vn經(jīng)過Kalman算法濾波處理后的結(jié)果;F為系統(tǒng)狀態(tài)矩陣;rn為無人機(jī)在導(dǎo)航坐標(biāo)中的位置矩陣;δrn為位置誤差矩陣;vn為理想情況下無人機(jī)相對地面的速度矩陣;δvn為速度誤差矩陣;bg為陀螺儀的零偏誤差;ba為加速度計(jì)的零偏誤差;G為過程噪聲矩陣;w為高斯白噪聲向量。
1.3.3 GNSS位置更新
GNSS/SINS組合導(dǎo)航系統(tǒng)需要對GNSS和SINS各自的定位解算結(jié)果進(jìn)行融合,但是2種導(dǎo)航系統(tǒng)的定位解算結(jié)果存在差異,前者為GNSS天線的位置,后者為慣性測量單元(IMU)的位置[6]。因此,當(dāng)融合2種解算結(jié)果時(shí),需要修正定位目標(biāo)不同產(chǎn)生的誤差。
GNSS天線與慣性測量單元的位置關(guān)系如公式(7)所示。
rn GNSS=rn IMU+D-1 RCbnl b GNSS " " " " " " " " " " " " " " " " " " " " " " " " " " " "(7)
式中:rn GNSS為導(dǎo)航坐標(biāo)系中GNSS天線相位中心的位置矢量;rn IMU為慣性測量單元中心的位置矢量;D-1 R為位置修正矩陣;lb GNSS為桿臂的位置矢量。在GNSS信號缺失的情況下,利用公式(7)更新GNSS天線中心位置。
2 GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng)驗(yàn)證
2.1 仿真試驗(yàn)設(shè)計(jì)
2.1.1 試驗(yàn)?zāi)繕?biāo)
由上文可知,改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS無人機(jī)電力巡線導(dǎo)航系統(tǒng)的設(shè)計(jì)重點(diǎn)為野值處理、基于改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)的GNSS缺失數(shù)據(jù)預(yù)測、GNSS/SINS組合導(dǎo)航信息融合以及導(dǎo)航信息預(yù)測,試驗(yàn)?zāi)繕?biāo)為驗(yàn)證以上3個(gè)核心功能。
2.1.2 電力巡線場景選取
無人機(jī)電力巡線的場景比較復(fù)雜,包括平原、丘陵和山地等。在真實(shí)場景中,丘陵、山地復(fù)雜的地勢、多樣的植被會形成干擾,容易導(dǎo)致GNSS信號缺失。為了驗(yàn)證導(dǎo)航算法對野值的處理效果和對缺失數(shù)據(jù)的預(yù)測效果,選取丘陵山地場景。
2.1.3 仿真方法以及參數(shù)設(shè)置
本文利用MATLAB搭建仿真環(huán)境,設(shè)置無人機(jī)的初始飛行速度,使其在特定高度進(jìn)行周期性飛行。模擬開始后,當(dāng)采集導(dǎo)航定位數(shù)據(jù)時(shí),在9 s、45 s插入離散值(野值)。GNSS導(dǎo)航系統(tǒng)在50 s~65 s出現(xiàn)信號缺失的情況。其他仿真參數(shù)見表1。
2.2 仿真數(shù)據(jù)分析
2.2.1 野值處理仿真數(shù)據(jù)分析
野值處理的目標(biāo)是準(zhǔn)確識別、剔除超過正常范圍的離散值,野值出現(xiàn)的時(shí)間點(diǎn)為仿真開始后的9 s和45 s,利用七點(diǎn)二階算法進(jìn)行處理,從速度和位置2個(gè)方面評價(jià)野值處理的效果。
2.2.1.1 基于無人機(jī)速度的野值處理效果分析
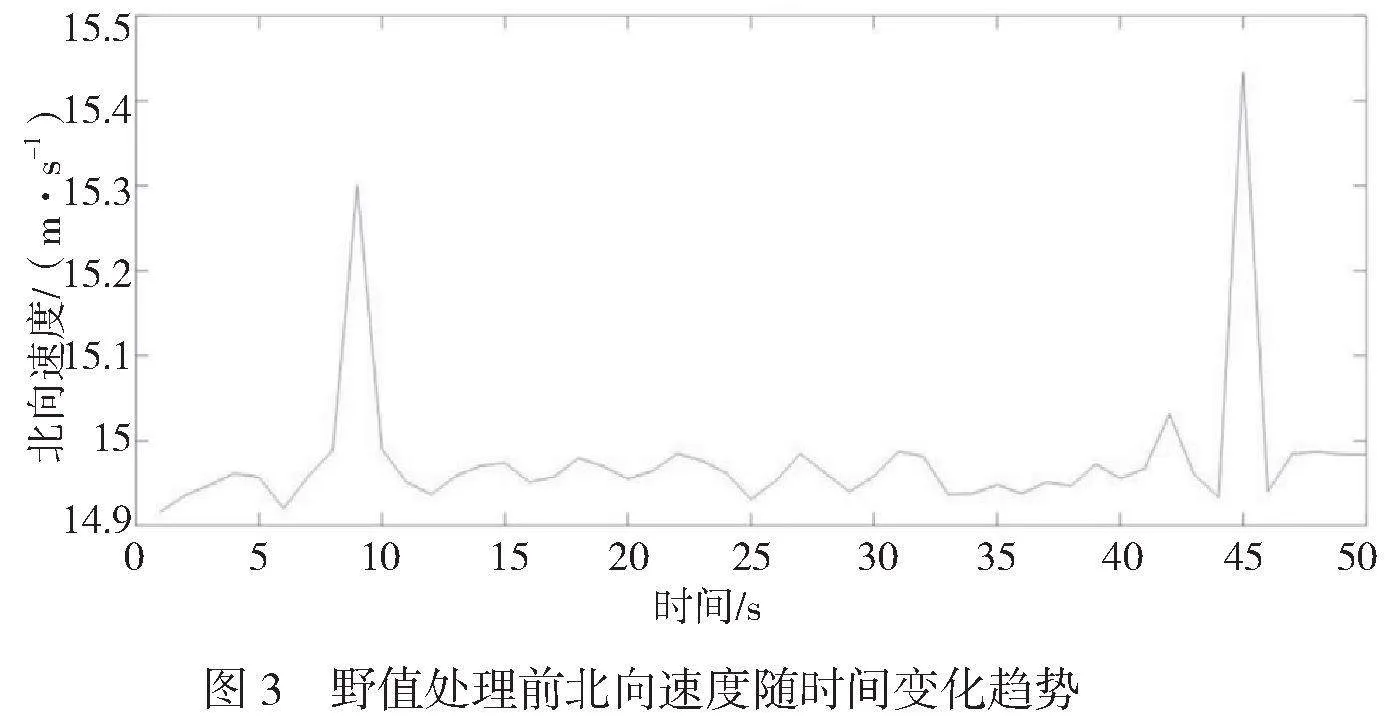
在野值處理前,北向和東向的速度在9 s和45 s出現(xiàn)了明顯的離散點(diǎn)。以北向速度為例,其變化趨勢如圖3所示。在0~50 s,正常速度約為14.9 m/s~15.0 m/s,2個(gè)野值分別為15.3 m/s、15.4 m/s。經(jīng)過處理后,0~50 s的北向速度為
14.9 m/s~15.0 m/s,東向速度的2個(gè)野值為14.6 m/s、14.9 m/s。經(jīng)過處理后,0~50 s的速度為14.15 m/s~14.30 m/s。說明七點(diǎn)二階算法對速度野值的處理效果良好。
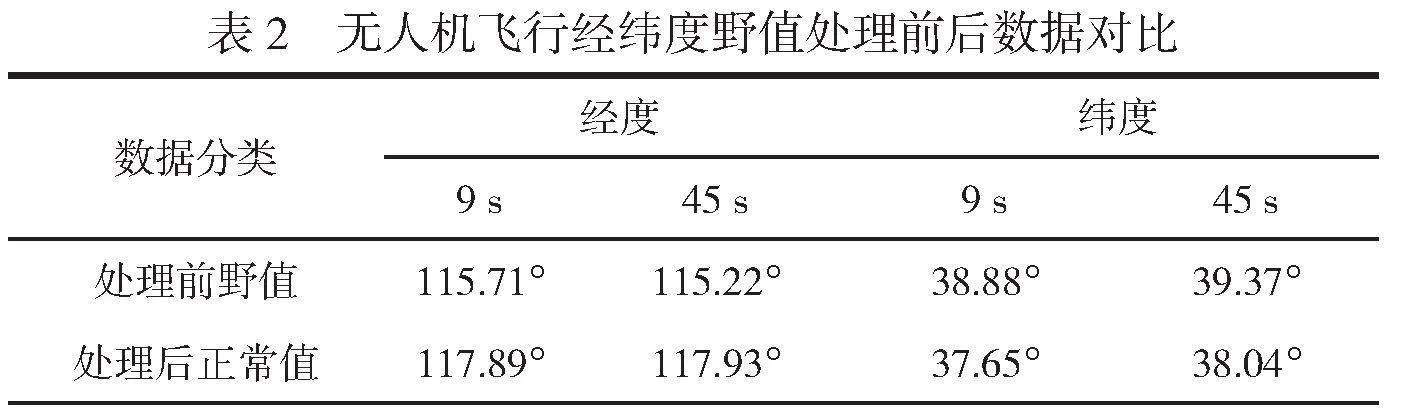
2.2.1.2 基于無人機(jī)位置的野值處理效果分析
經(jīng)度和緯度數(shù)據(jù)能夠體現(xiàn)無人機(jī)的位置,對處理前后的經(jīng)緯度野值數(shù)據(jù)進(jìn)行對比,得到的結(jié)果見表2。由表2可知,經(jīng)過七點(diǎn)二階算法優(yōu)化,野值明顯下降,回落至正常范圍。
2.2.2 改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)對GNSS缺失數(shù)據(jù)預(yù)測效果分析
將傳統(tǒng)灰色神經(jīng)網(wǎng)絡(luò)和改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)作為對照組,以0~50 s采集的正常數(shù)據(jù)為依據(jù),利用2種算法對50 s~65 s缺失的數(shù)據(jù)進(jìn)行預(yù)測,包括北向速度、東向速度、經(jīng)度以及緯度,效果對比見表3。由表3可知,利用改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)預(yù)測缺失的GNSS數(shù)據(jù),其平均誤差、均方誤差和最大誤差均小于傳統(tǒng)灰色神經(jīng)網(wǎng)絡(luò),預(yù)測精度更高。
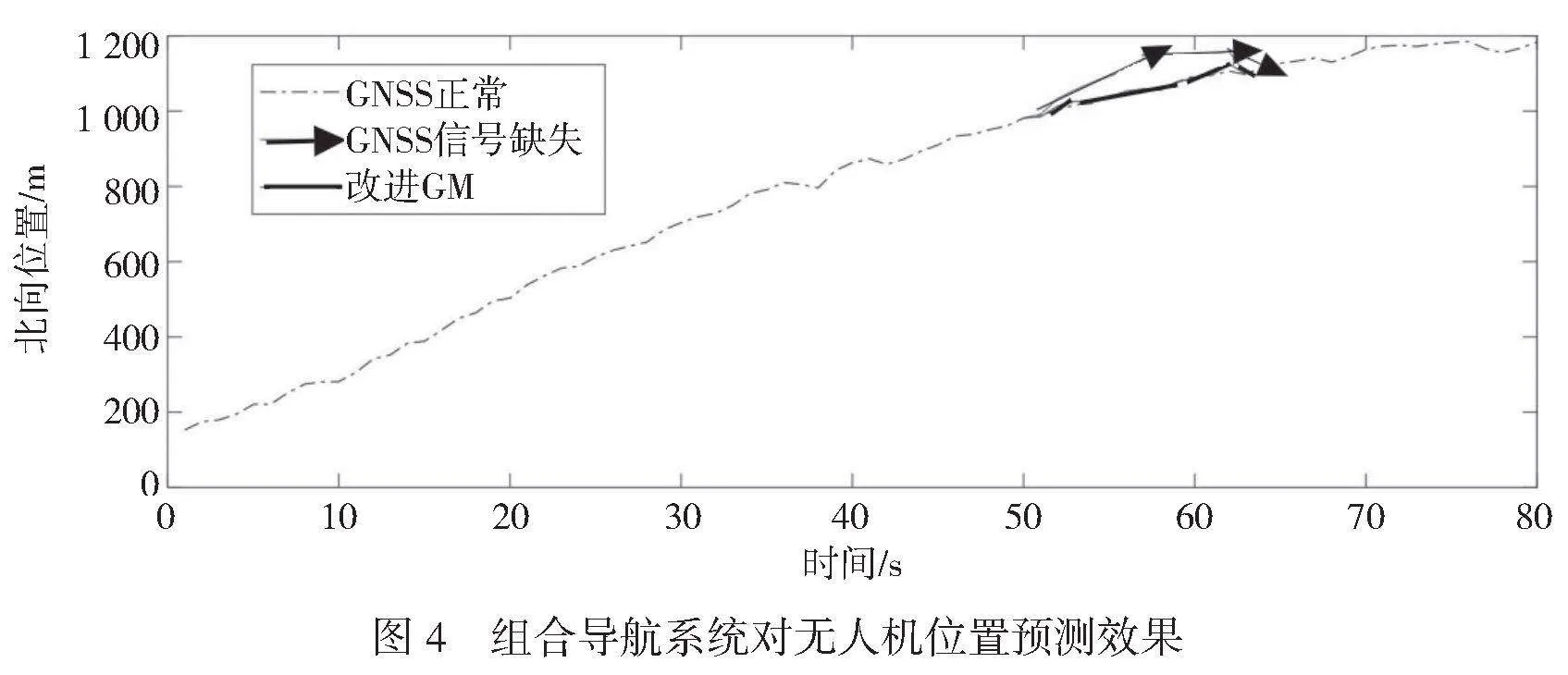
2.2.3 基于GNSS/SINS組合導(dǎo)航的無人機(jī)位置預(yù)測
將SINS數(shù)據(jù)和GNSS數(shù)據(jù)進(jìn)行融合,能夠進(jìn)一步提高系統(tǒng)對無人機(jī)位置的預(yù)測精度,消除導(dǎo)航誤差。利用改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS組合導(dǎo)航系統(tǒng)模擬位置預(yù)測效果,模擬結(jié)果如圖4所示。其中,虛線為GNSS未缺失的正常數(shù)據(jù),箭頭線為GNSS信號缺失、僅依靠SINS進(jìn)行導(dǎo)航的數(shù)據(jù),實(shí)線為改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS組合導(dǎo)航系統(tǒng)的位置預(yù)測數(shù)據(jù)(改進(jìn)GM)。組合導(dǎo)航系統(tǒng)的預(yù)測結(jié)果與正常的GNSS數(shù)據(jù)高度一致,位置精度預(yù)測效果良好。
3 結(jié)論
針對無人機(jī)GNSS導(dǎo)航容易出現(xiàn)數(shù)據(jù)缺失、SINS導(dǎo)航精度較差的問題,本文設(shè)計(jì)了改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS組合導(dǎo)航系統(tǒng),得到以下結(jié)論。1)由于GNSS導(dǎo)航系統(tǒng)容易受到電磁信號或者復(fù)雜地形干擾,導(dǎo)致部分位置、速度數(shù)據(jù)缺失,不能提供可靠的導(dǎo)航,因此本文設(shè)計(jì)改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)模型,預(yù)測缺失部分的數(shù)據(jù)。模型采用七點(diǎn)二階算法處理異常的離散值,提升數(shù)據(jù)的平滑性,并運(yùn)用灰色神經(jīng)網(wǎng)絡(luò)進(jìn)行預(yù)測。進(jìn)行仿真測試,測試結(jié)果表明其預(yù)測精度較高。2)使用傳統(tǒng)的GNSS/SINS組合導(dǎo)航方式,如果GNSS數(shù)據(jù)缺失,僅由SINS進(jìn)行導(dǎo)航,那么誤差會較大。改進(jìn)灰色神經(jīng)網(wǎng)絡(luò)GNSS/SINS組合導(dǎo)航系統(tǒng)采用Kalman算法融合SINS數(shù)據(jù)和預(yù)測的GNSS數(shù)據(jù),能夠顯著提升無人機(jī)的位置預(yù)測精度,進(jìn)行精準(zhǔn)導(dǎo)航。
參考文獻(xiàn)
[1]楊春峰,于榮華,黃維,等.基于激光雷達(dá)和可見光立體測量的無人機(jī)電力巡線技術(shù)研究[J].自動化技術(shù)與應(yīng)用,2021,40(10):177-180.
[2]郭遲,陳毅超,羅亞榮.一種世界坐標(biāo)系下的GNSS/SINS松組合導(dǎo)航矩陣?yán)钊簽V波算法[J].中國慣性技術(shù)學(xué)報(bào),2024,32(3):242-249.
[3]王兆輝.基于數(shù)據(jù)融合的電力線巡檢無人機(jī)安全距離研究[J].機(jī)械設(shè)計(jì)與制造工程,2022,51(11):53-56.
[4]王瑋,潘新龍,林雪原,等.GNSS/SINS組合導(dǎo)航系統(tǒng)的改進(jìn)變分貝葉斯自適應(yīng)濾波算法[J].大地測量與地球動力學(xué),2024,44(6):560-565.
[5]吳嘉琦,冉術(shù)蘭.輸電線路巡線中的無人機(jī)技術(shù)應(yīng)用[J].電子技術(shù),2023,52(9):242-243.
[6]陳廣宇,張磊,趙磊,等.基于改進(jìn)神經(jīng)網(wǎng)絡(luò)的電網(wǎng)線損率預(yù)測模型分析[J].自動化技術(shù)與應(yīng)用,2022,41(5):130-133.
