儲能并網模式下的VSG模糊控制策略
2024-12-17 00:00:00殷勤楊健毛瑞益
中國新技術新產品 2024年20期
摘 要:本文針對儲能并網模式下投切負荷微網頻率和功率變化大的問題,提出了一種虛擬慣量和阻尼靈活可控的虛擬同步機(VSG)模糊控制策略。首先,建立儲能VSG控制模型,給出計及頻率變化率最大值和儲能放電特性的慣量范圍,提出了儲能并網時的VSG模糊控制策略,使阻尼和慣量在模糊規則下靈活變化,提升電網穩定。其次,在MATLAB/Simulink中比較了3種控制方式,驗證了所提策略可減少功率和頻率波動,并能降低對儲能容量的需求。
關鍵詞:虛擬同步機;慣量;模糊控制;儲能
中圖分類號:TM 76" " " " " 文獻標志碼:A
在石化資源緊缺的背景下,可再生能源在發電中的比例越來越多。可再生能源機組大量使用電力電子器件接入電網,將較大幅度降低系統慣量,利用虛擬同步機技術提高慣量水平。許多文獻提出了各種虛擬慣量和阻尼控制策略來提升系統穩定性。文獻[1]分析了阻尼、虛擬慣量和有功下垂系數的變化規律,選擇了一種雙機互聯自適應策略,但是計算較復雜,阻尼、虛擬慣量和有功下垂系數自適應參數較難計算。文獻[2]和文獻[3]提出了一種基于模糊控制算法的自適應VSG虛擬慣量控制策略,但是沒有具體分析模糊控制器的輸入、輸出范圍。文獻[4]根據儲能物理約束分析了虛擬同步機儲能單元配置和參數選取范圍,但是沒有考慮儲能荷電狀態的影響。
針對上述控制策略的不足,本文在建立儲能并網模式下的VSG微網控制模型的基礎上引入模糊控制理論,分析并計算虛擬慣量取值范圍,將其作為模糊控制的輸出論域,同時使用模糊規則控制虛擬慣量和阻尼進行靈活變化。MATLAB/Simulink仿真結果表明,本文所提策略能夠顯著提高負荷擾動時的系統動態性能。
1 虛擬同步機工作原理
分布式電源通常使用電力電子器件接入電網,靜態和動態性能與大電網不同,使分布式電源具有與同步機類似的特性,可以使用虛擬同步機技術模擬傳統發電機特性,此為VSG技術。使用VSG模糊控制策略的重點是采用模糊控制方法實時且自動改變虛擬慣量和阻尼參數,從而提升頻率和功率動態性能。
1.1 VSG運動方程
虛擬同步機運動方程模擬傳統同步機的轉子運動方式,通常將電網角速度近似為VSG額定角速度,取極對數為1,方程如公式(1)所示。
(1)
式中:t為擾動時VSG振蕩時間;J為虛擬慣量;D為阻尼;Tm、To、Td分別為VSG機械轉矩、電磁轉矩和阻尼轉矩;Po、Pm分別為VSG機械功率和電磁功率;ωo為VSG輸出角速度;ωs為VSG額定角速度;δ為VSG功角。
1.2 虛擬調速器
與同步機的調速器相似,VSG將實際角頻率和額定角頻率的差值作為虛擬調速器的輸入,補償了虛擬機械功率。VSG系統波動可實現頻率的無差調節,方程如公式(2)所示。
Pm=Pset-Kp(ωs-ωo) " " " " " " " " " " "(2)
式中:Kp為頻率調節系數;Pset為調度功率。
1.3 無功下垂
將實際無功功率和無功指令的差值作為反饋量,設定實際需要輸出的電壓。無功下垂功能可自動調節實際輸出電壓值,使輸出電壓保持穩定。在并網模式下,無功調度指令通常由調度控制中心下達,因此設Qref=0,方程如公式(3)所示。
E=Uref+kq(Qref-Qo) " " " " " " " " "(3)
式中:E為VSG內電勢;Uref為VSG輸出電壓參考值;kq為無功調節系數;Qref為無功調度指令;Qo為VSG實際輸出無功功率。
2 模糊VSG控制
2.1 虛擬慣量和阻尼對系統動態性能的影響
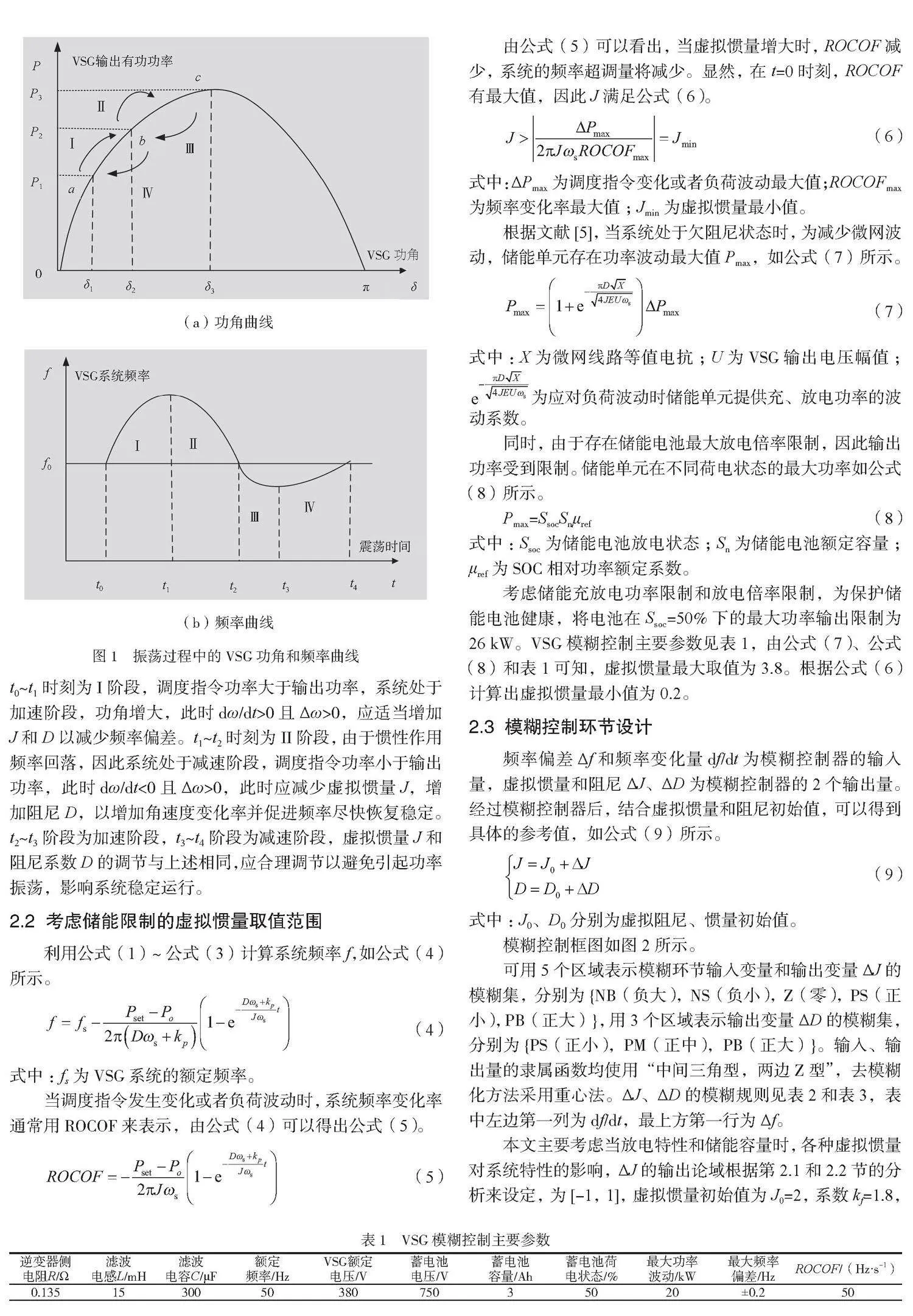
在虛擬慣量和阻尼固定VSG中,可再生能源出力和負荷具有隨機性,根據公式(1)可以得到VSG的頻率偏差和頻率變化曲線,如圖1所示,整個變化過程分為I、II、III和IV共4個階段。
在圖1(a)中,P1和δ1表示t0時刻a穩定狀態時的系統輸出有功功率和功角;P2和δ2表示當系統受到擾動、達到新穩定狀態b時的有功功率和功角,由于慣性作用,系統不會一次穩定;P3和δ3表示在慣性作用和暫態c時系統輸出最大有功功率和功角,系統擾動后需要經過多個周期振蕩才能穩定在b狀態,功率和頻率在這段過程中按照阻尼振蕩。在圖1(b)中,整個振蕩過程共分為I、II、III和IV階段,分別對應4個時間段,即t0~t1、t1~t2、t2~t3和t3~t4;f0表示系統額定頻率。
由公式(1)可知,同時調節虛擬慣量J和阻尼系數D可改變角頻率偏差和角頻率變化率,并增加調節靈活性。t0~t1時刻為I階段,調度指令功率大于輸出功率,系統處于加速階段,功角增大,此時dω/dtgt;0且Δωgt;0,應適當增加J和D以減少頻率偏差。t1~t2時刻為II階段,由于慣性作用頻率回落,因此系統處于減速階段,調度指令功率小于輸出功率,此時dω/dtlt;0且Δωgt;0,此時應減少虛擬慣量J,增加阻尼D,以增加角速度變化率并促進頻率盡快恢復穩定。t2~t3階段為加速階段,t3~t4階段為減速階段,虛擬慣量J和阻尼系數D的調節與上述相同,應合理調節以避免引起功率振蕩,影響系統穩定運行。
2.2 考慮儲能限制的虛擬慣量取值范圍
利用公式(1)~公式(3)計算系統頻率f,如公式(4)所示。
(4)
式中:fs為VSG系統的額定頻率。
當調度指令發生變化或者負荷波動時,系統頻率變化率通常用ROCOF來表示,由公式(4)可以得出公式(5)。
(5)
由公式(5)可以看出,當虛擬慣量增大時,ROCOF減少,系統的頻率超調量將減少。顯然,在t=0時刻,ROCOF有最大值,因此J滿足公式(6)。
(6)
式中:ΔPmax為調度指令變化或者負荷波動最大值;ROCOFmax為頻率變化率最大值;Jmin為虛擬慣量最小值。
根據文獻[5],當系統處于欠阻尼狀態時,為減少微網波動,儲能單元存在功率波動最大值Pmax,如公式(7)所示。
(7)
式中:X為微網線路等值電抗;U為VSG輸出電壓幅值;為應對負荷波動時儲能單元提供充、放電功率的波動系數。
同時,由于存在儲能電池最大放電倍率限制,因此輸出功率受到限制。儲能單元在不同荷電狀態的最大功率如公式(8)所示。
Pmax=SsocSnμref" " " " " " " " " " " (8)
式中:Ssoc為儲能電池放電狀態;Sn為儲能電池額定容量;μref為SOC相對功率額定系數。
考慮儲能充放電功率限制和放電倍率限制,為保護儲能電池健康,將電池在Ssoc=50%下的最大功率輸出限制為26 kW。VSG模糊控制主要參數見表1,由公式(7)、公式(8)和表1可知,虛擬慣量最大取值為3.8。根據公式(6)計算出虛擬慣量最小值為0.2。
2.3 模糊控制環節設計
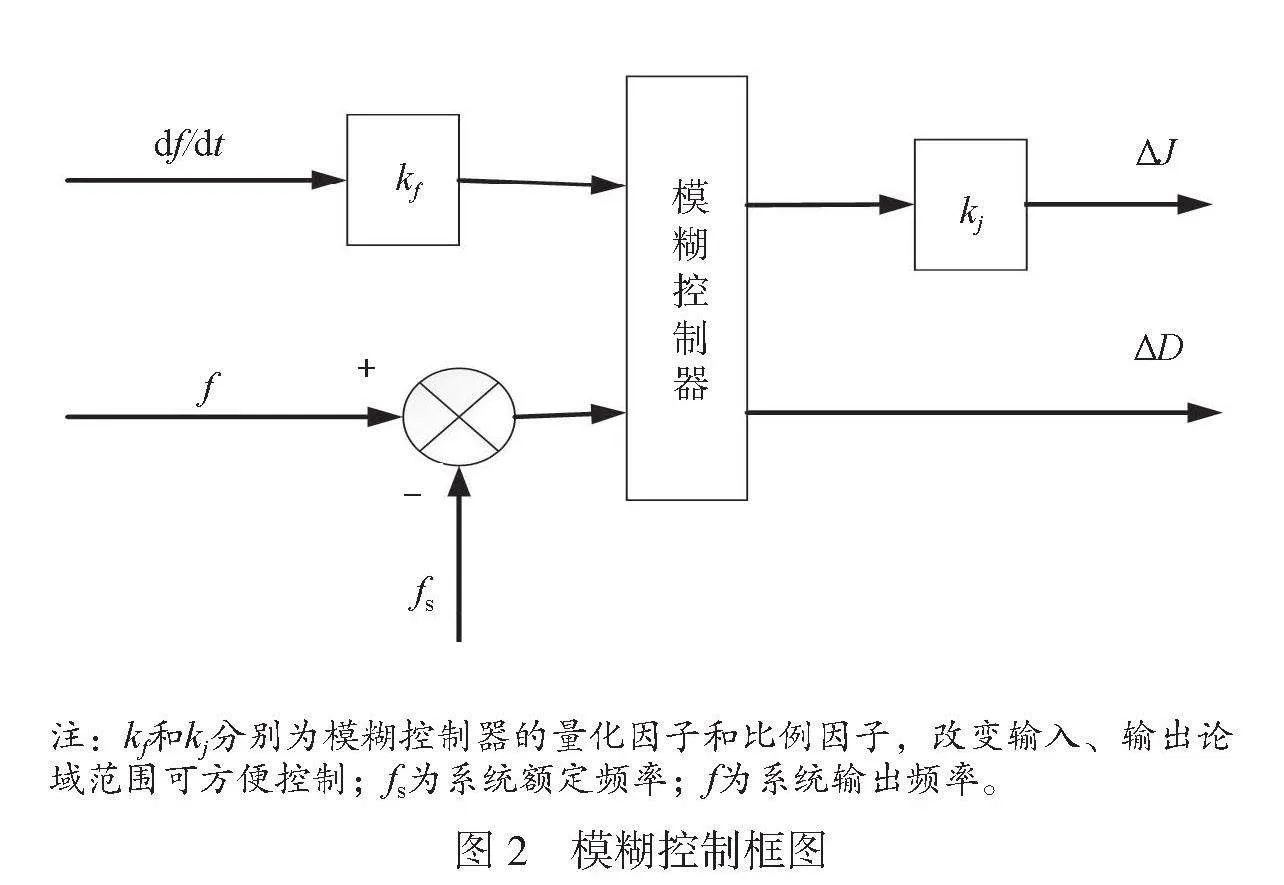
頻率偏差Δf和頻率變化量df/dt為模糊控制器的輸入量,虛擬慣量和阻尼ΔJ、ΔD為模糊控制器的2個輸出量。經過模糊控制器后,結合虛擬慣量和阻尼初始值,可以得到具體的參考值,如公式(9)所示。
(9)
式中:J0、D0分別為虛擬阻尼、慣量初始值。
模糊控制框圖如圖2所示。
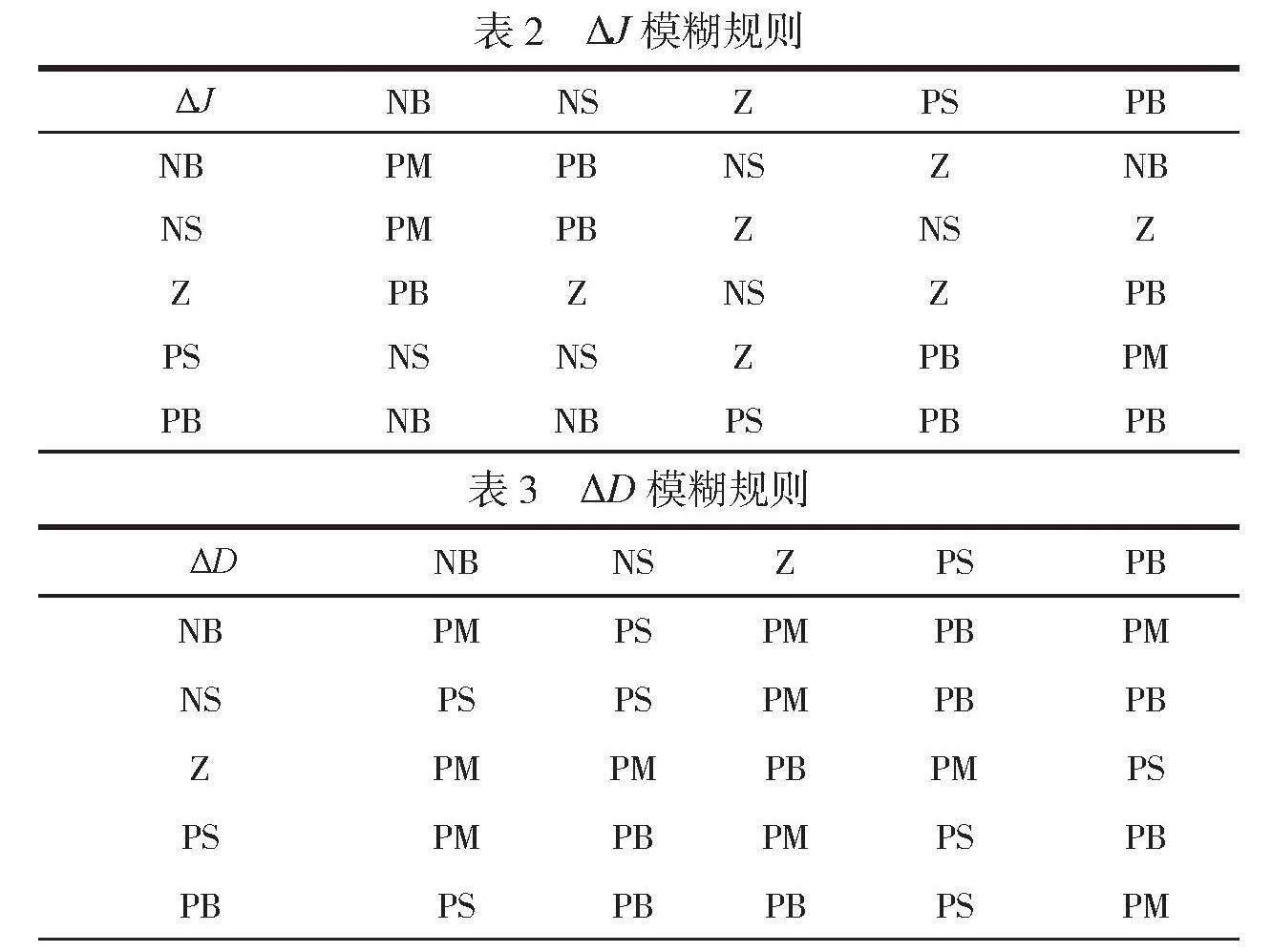
可用5個區域表示模糊環節輸入變量和輸出變量ΔJ的模糊集,分別為{NB(負大),NS(負小),Z(零),PS(正小),PB(正大)},用3個區域表示輸出變量ΔD的模糊集,分別為{PS(正小),PM(正中),PB(正大)}。輸入、輸出量的隸屬函數均使用“中間三角型,兩邊Z型”,去模糊化方法采用重心法。ΔJ、ΔD的模糊規則見表2和表3,表中左邊第一列為df/dt,最上方第一行為Δf。
本文主要考慮當放電特性和儲能容量時,各種虛擬慣量對系統特性的影響,ΔJ的輸出論域根據第2.1和2.2節的分析來設定,為[-1,1],虛擬慣量初始值為J0=2,系數kf=1.8,系數kj=2。本文選擇虛擬阻尼,使系統處于欠阻尼狀態并使穩定時間適宜,初始值D0=25,本文設定阻尼輸出論域ΔD為[0,10]。
表2 ΔJ模糊規則
ΔJ NB NS Z PS PB
NB PM PB NS Z NB
NS PM PB Z NS Z
Z PB Z NS Z PB
PS NS NS Z PB PM
PB NB NB PS PB PB
表3 ΔD模糊規則
ΔD NB NS Z PS PB
NB PM PS PM PB PM
NS PS PS PM PB PB
Z PM PM PB PM PS
PS PM PB PM PS PB
PB PS PB PB PS PM
3 仿真試驗
為了驗證本文考慮儲能容量和放電特性的VSG模糊控制策略的正確性,在MATLAB/Simulink中構建儲能并網VSG仿真模型。儲能電池容量為3 Ah,并網逆變器采用VSG模糊控制。主要仿真參數見表1。
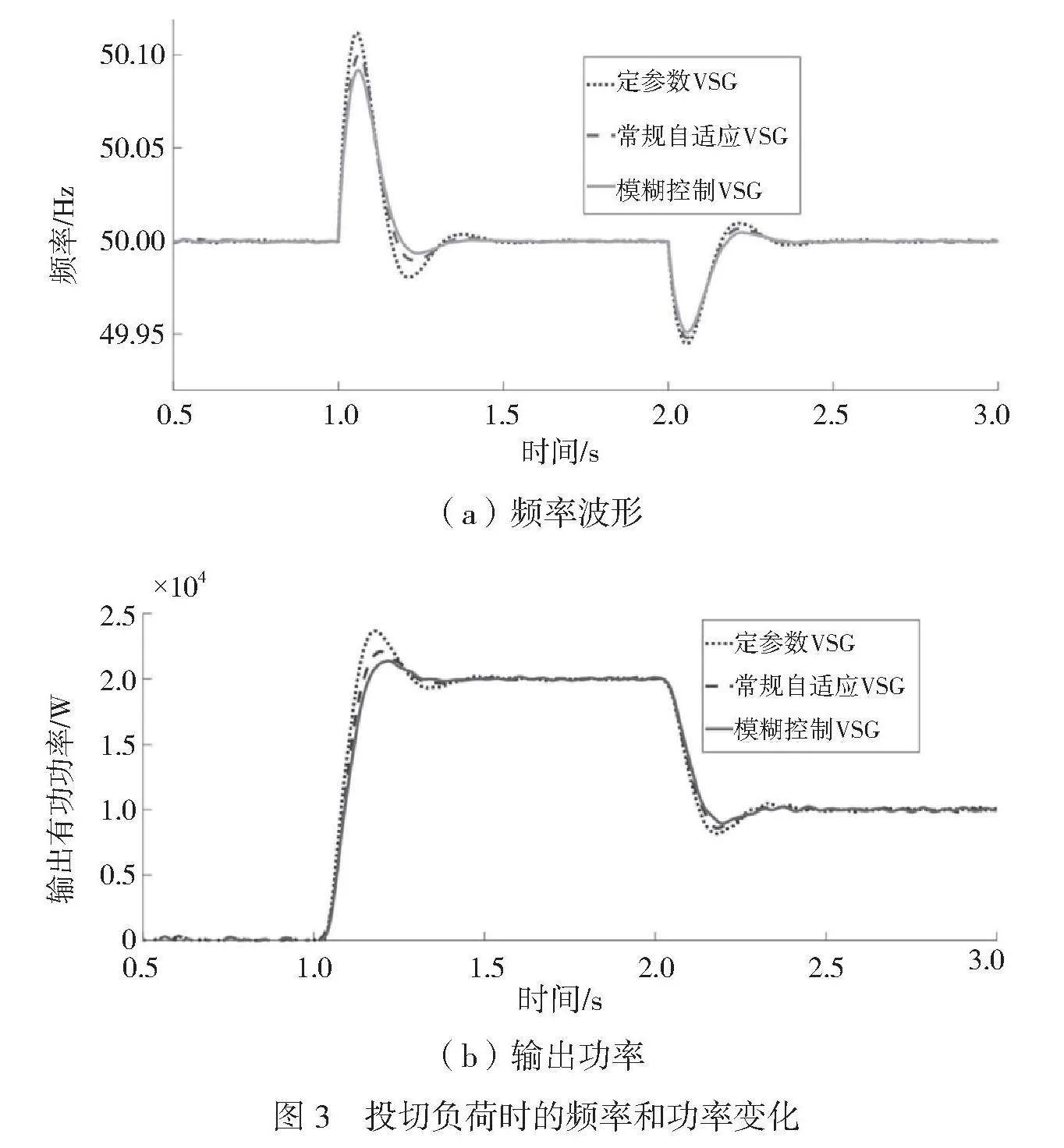
系統在0 s時刻并網,設定在1 s時刻加入20 kW負荷,2 s時刻負荷減至10 kW。本文比較3種不同控制方式下的VSG頻率和輸出有功功率變化情況。1) 定參數VSG,J=2,D=25。2) 常規自適應,VSG,J0=2,D0=25。3) 模糊控制VSG,J0=2,D0=25。
投切負荷時頻率和功率變化如圖3所示。從圖3(a)可以看出,在設定的虛擬慣量和阻尼范圍內,無論使用哪種控制模式,系統始終處于欠阻尼狀態,可以較好地自適應變化。當負荷發生變化時,系統開始振蕩,振蕩幅值各有不同。但是隨著時間變化,系統頻率最終恢復至50 Hz,說明3種控制模式均可以使系統恢復穩定。但是從圖3(a)可以看出,在3種控制方式中,本文所提的模糊控制VSG振蕩幅值最好,超調量為0.91 Hz;常規自適應振蕩幅值居中,超調量為0.11 Hz;定參數VSG振蕩幅值最大,超調量為0.12 Hz,同時,模糊控制VSG系統能在最快時間內恢復穩定。
在圖3(b)中,VSG頻率和有功功率在負荷變化時的初始振蕩時間有所相同,與頻率變化相比,有功功率的振蕩對系統影響更大,需要重點考慮。當采用定參數VSG控制時,輸出有功功率最大,為23.69 kW,超出設定有功功率3.69 kW;當采用自適應VSG控制時,輸出有功功率最大,為22.05 kW,超出設定有功功率2.05 kW;當采用模糊控制VSG時,輸出有功功率最大,為21.49 kW,超出設定有功功率1.49 kW。比較3種控制方式,模糊控制VSG顯著降低了輸出有功功率最大變化量,有效減少了負荷變化時系統的功率振蕩,大幅度降低了對儲能容量和荷電狀態的需求。
4 結論
本文針對儲能并網過程中投切負荷時出現的頻率和功率振蕩問題,提出了基于VSG虛擬慣量和阻尼模糊的控制策略,得出以下2個結論。1) 由ROCOF最大值計算出虛擬慣量最小值,由儲能系統容量和放電特性得出虛擬慣量最大值,將虛擬慣量范圍作為模糊控制器的輸出論域,優化設計慣性和阻尼。2) 利用MATLAB/Simulink比較定參數VSG、常規自適應VSG以及本文所提的模糊控制策略,驗證了本文策略的正確性和有效性。
參考文獻
[1]程江鵬,肖健梅,王錫淮.基于改進粒子群優化算法的VSG控制策略[J].控制工程,2021,28(10):2028-2037.
[2]程國棟,邵宣,王貴峰.虛擬同步發電機參數自適應控制策略[J].可再生能源,2021,39(12):1655-1661.
[3]周建萍,胡成奕,茅大鈞,等.基于模糊控制的自適應虛擬同步發電機控制策略[J].廣東電力,2020,33(1):53-60.
[4]張永超,王維慶,王海云,等.VSC-HVDC逆變側的VSG轉動慣量和阻尼系數模糊自適應控制[J].太陽能學報,2021,42(11):463-469.
[5]李吉祥,趙晉斌,屈克慶,等.考慮SOC特性的微電網VSG運行參數邊界分析[J].電網技術,2018,42(5):1451-1457.
