基于無人機機載AI模塊的架空輸電線路巡檢技術
2024-12-21 00:00:00陳琨
中國新技術新產品 2024年16期
關鍵詞:無人機

摘 要:在架空輸電線路的巡檢工作中,由于人工巡檢方式效率較低,難以滿足現代電網需求,因此本文基于無人機機載AI模塊對架空輸電線路巡檢技術進行研究。首先,采用YOLOv3算法構建AI模塊算法,對輸電線路圖像進行精確識別。其次,對損失函數進行優化,提高模型的預測準確性。最后,基于上述方法對架空輸電線路巡檢過程進行規劃。測試結果表明,本文所研究的AI模塊在輸電線路巡檢過程中能夠檢測架空輸電線路中存在的缺陷,應用效果較好,能夠達到最初設計目標,說明本研究為架空輸電線路的巡檢提供了一種高效的解決方案。
關鍵詞:無人機;機載AI模塊;架空輸電線路;巡檢
中圖分類號:TM 74" " " " " " 文獻標志碼:A
隨著電力網絡持續擴大,架空輸電線路的巡檢工作越來越重要。常規的人工巡檢方法存在效率低、人力成本高以及難以覆蓋復雜地形等問題[1]。因此,開發一種高效、智能且安全的巡檢技術已成為電力行業的迫切需求。
隨著無人機技術的發展,引入機載AI模塊進一步提升了無人機巡檢的智能化水平[2]。采用先進的圖像識別和算法技術,機載AI模塊能夠對輸電線路進行自動識別、定位和缺陷檢測,提高了巡檢的準確性和效率。
本文研究基于無人機機載AI模塊的架空輸電線路巡檢技術,詳細介紹了基于YOLOv3算法的AI模塊算法,分析其在圖像識別中的應用。分析損失函數預測誤差以及模型優化方法,提高AI模塊的識別準確率。利用技術應用測試驗證該技術在輸電線路巡檢中的實際應用效果。本研究為電力行業提供一種高效、智能和安全的巡檢方案,保障電力網絡安全運行。
1 基于YOLOv3算法的AI模塊算法
為了對輸電線路進行精確識別與檢測,本文引入YOLOv3算法中的圖像識別網絡模型,將其應用于AI模塊中,以提升圖像處理速度,實時回傳檢測結果,自動生成檢測報告[3]。
1.1 基于YOLOv3算法對機載AI模塊進行圖像識別
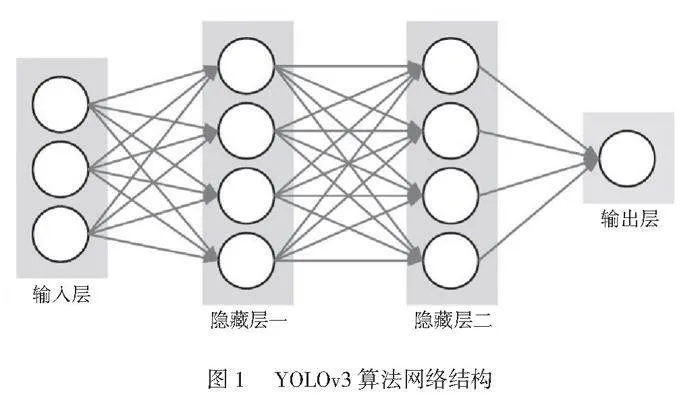
無人機巡檢的核心技術是圖像處理與目標檢測,YOLOv3算法具有實時性和魯棒性,其準確性高,因此備受重視。為精準定位巡檢目標并快速識別缺陷,采用YOLOv3算法構建機載AI模塊,將目標檢測轉化為單次前向傳播回歸問題,顯著提升識別效率。YOLOv3算法網絡結構如圖1所示。
采用圖1中的YOLOv3模型結構,將輸入圖像劃分為網格。在每個網格范圍內預測固定數量的邊界框,為每個邊界框匹配1個置信度得分,匯總網格中各個邊界的置信度得分。
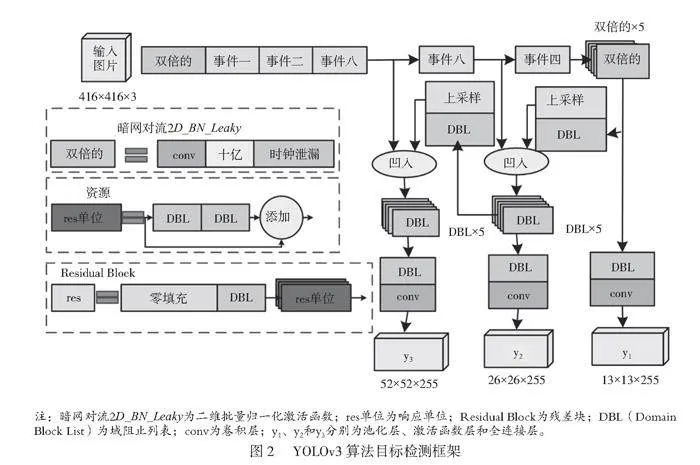
在YOLOv3的目標檢測算法中,每個網格單元i都需要預測一系列邊界框。根據中心坐標預測值來確定txi和tyi這些邊界框的位置和尺寸。寬度和高度預測值twi和thi反映了邊界框的寬度和高度相對于整個圖像的縮放因子[4]。YOLOv3算法的目標檢測框架如圖2所示。
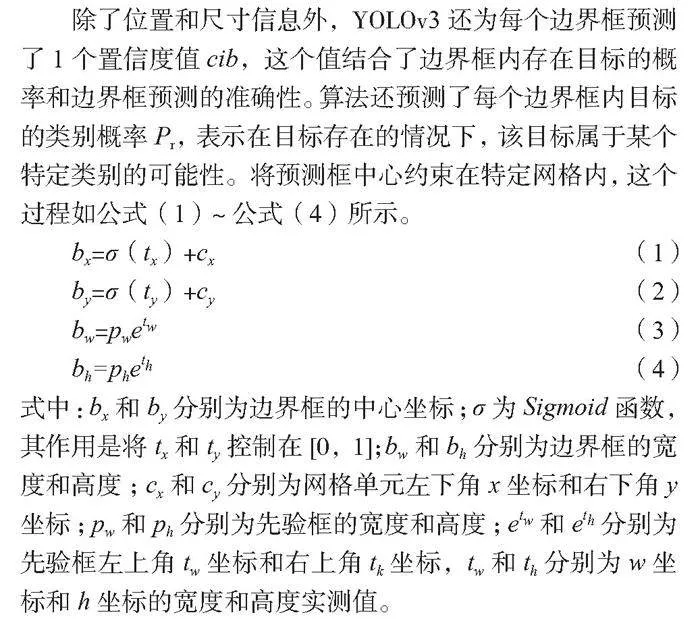
除了位置和尺寸信息外,YOLOv3還為每個邊界框預測了1個置信度值cib,這個值結合了邊界框內存在目標的概率和邊界框預測的準確性。算法還預測了每個邊界框內目標的類別概率Pr,表示在目標存在的情況下,該目標屬于某個特定類別的可能性。將預測框中心約束在特定網格內,這個過程如公式(1)~公式(4)所示。
bx=σ(tx)+cx (1)
by=σ(ty)+cy " (2)
bw=pwetwnbsp; " " (3)
bh=pheth " " " "(4)
式中:bx和by分別為邊界框的中心坐標;σ為Sigmoid函數,其作用是將tx和ty控制在[0,1];bw和bh分別為邊界框的寬度和高度;cx和cy分別為網格單元左下角x坐標和右下角y坐標;pw和ph分別為先驗框的寬度和高度;etw和eth分別為先驗框左上角tw坐標和右上角tk坐標,tw和th分別為w坐標和h坐標的寬度和高度實測值。
結合置信度值和類別概率值,可以計算每個邊界框內目標的最終得分,確定包括目的的邊界框,對圖像中的目標進行精確檢測。
1.2 損失函數預測誤差
在架空輸電線路巡檢中,基于YOLOv3的機載AI模塊利用損失函數評估預測性能,衡量預測與實際差異[5]。優化損失函數,該模塊能顯著提升對輸電線路以及其潛在缺陷的識別精度,保證巡檢效果。
YOLOv3算法融合多尺度特征,在3個不同尺度的輸出層中精準預測各種大小的目標[6],全面評估預測準確性,提升模型性能,保證目標檢測的精準度和效率。
坐標損失是YOLOv3優化模型精度的關鍵部分,其使用均方誤差評估預測與真實邊界框的位置差異,如公式(5)所示。
(5)
式中:Lcoord為均方誤差;S2為網格的數量;B為每個網格預測的邊界框數量;i為第i個網格單元;j為第j個邊界框;Iijobj為第i個網格單元的第j個邊界框是否負責預測某個目標,負責為1,不負責為0;xi、yi、wi和hi分別為真實邊界框的中心坐標、寬度和高度;、、和分別為預測邊界框的中心坐標、寬度和高度;λcoord為坐標損失的權重系數。
置信度損失的作用是評估模型對邊界框內是否存在目標的預測準確性,其使用交叉熵損失函數來計算,如公式(6)所示。
(6)
式中:Iconf為交叉熵損失函數;Ci和分別為真實和預測的置信度得分;λnoord為無目標邊界框的置信度損失的權重系數;Iijnoobj為第i個網格單元的第j個邊界框不負責預測某個目標,不負責為1,負責為0。
分類損失的作用是衡量模型對目標類別的預測準確性,其使用交叉熵損失函數來計算,如公式(7)所示。
(7)
式中:Lclass為分類損失;classes為所有可能的目標類別集合;pi(c)為真實的目標類別概率分布,對目標c來說,如果第i個網格的第j個邊界框包括該類別的目標,那么pi(c)=1,如果不包括那么為0;為模型預測的目標類別概率分布,為模型認為第i個網格的第j個邊界框內目標屬于類別c的概率。
綜上所述,綜合預測誤差如公式(8)所示。
L=Lcoord+Lconf+Lclass " " " " (8)
式中:L為預測誤差。
1.3 架空輸電線路巡檢過程
在架空輸電線路的巡檢過程中,無人機機載AI模塊集成了YOLOv3算法,保證巡檢過程的實時性和準確性。
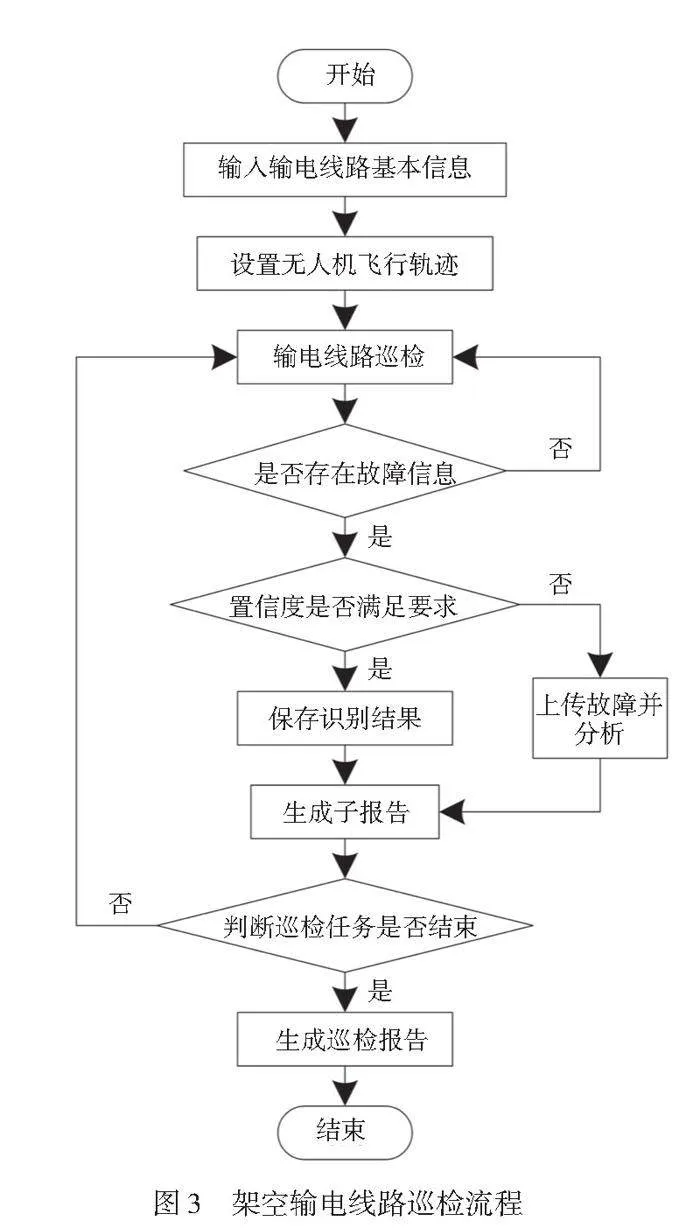
在巡檢過程中,AI模塊可以根據識別結果自動調整無人機的飛行軌跡和拍攝角度,獲取更加全面、清晰的圖像數據。AI模塊還可以對巡檢數據進行實時分析和處理,及時發現并報告潛在缺陷或異常情況,保障電力網絡安全、穩定地運行。架空輸電線路巡檢流程如圖3所示。
無人機根據預設的航線和航點進行自主飛行,并使用搭載的攝像頭實時獲取輸電線路圖像。AI模塊應用YOLOv3算法對圖像進行目標識別,一旦檢測到缺陷,例如線路斷裂或絕緣子破損,模塊就會根據缺陷的類別和置信度進行判斷。如果置信度高于預設閾值,那么該缺陷即被視為真實故障,并自動記錄其位置、類型和置信度等信息,生成包括詳細信息的巡檢報告。如果置信度低于閾值,疑似出現缺陷,AI模塊就會將相關信息回傳至服務器進行二次識別,以保證識別的準確性。
在這個過程中,無人機不僅能夠對輸電線路全面、高效地進行巡檢,還能夠自動生成詳細的巡檢報告,為后續故障處理和維護工作提供支持。
2 技術應用測試
為了驗證本文所提的基于無人機機載AI模塊的架空輸電線路巡檢技術的實際應用效果,對集成了YOLOv3算法的AI模塊進行測試,評估本文技術的應用性能,測試巡檢過程中的缺陷檢測精度。本次應用測試所使用的測試數據集包括有缺陷和無缺陷的絕緣子圖像各300張。以文獻[1]中的基于無人機低空攝影技術的架空輸電線路智能巡檢技術以及文獻[2]中的基于人工智能的輸電線路無人機巡檢技術為對比技術,進行測試。
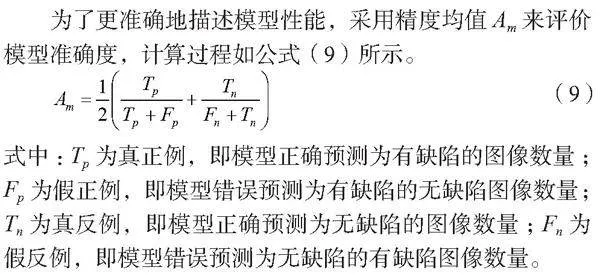
為了更準確地描述模型性能,采用精度均值Am來評價模型準確度,計算過程如公式(9)所示。
(9)
式中:Tp為真正例,即模型正確預測為有缺陷的圖像數量;Fp為假正例,即模型錯誤預測為有缺陷的無缺陷圖像數量;Tn為真反例,即模型正確預測為無缺陷的圖像數量;Fn為假反例,即模型錯誤預測為無缺陷的有缺陷圖像數量。
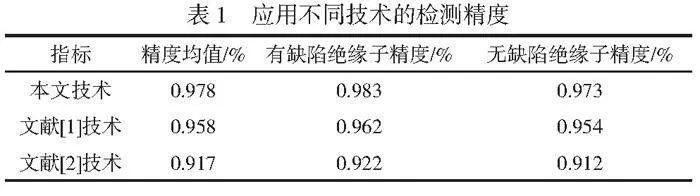
基于上述準備進行應用測試,得到應用不同技術的檢測精度(見表1)。
根據表1中的結果進行分析,將本文技術與文獻[1]技術和文獻[2]技術進行對比可知,本文技術在架空輸電線路巡檢中的性能表現優異。在表1中,本文技術的精度均值達到0.978,遠高于文獻[2]技術的0.917,略高于文獻[1]技術的0.958。在有缺陷絕緣子的識別方面,本文技術的精度為0.983,說明模型在識別關鍵缺陷方面能力出色。無缺陷絕緣子的識別精度也達到0.973,說明模型在區分正常與異常狀態方面的準確性。
為了進一步驗證本文技術的應用效率,對應用不同技術的圖像處理時間進行統計,以單張圖像處理均時以及平均處理速度為指標,得到應用不同技術的檢測效率(見表2)。
由表2可知,不同技術在圖像處理效率和速度方面的差異。其中,本文技術的單張圖像處理均時僅為8.7 ms,與文獻[1]技術的9.6 ms和文獻[2]技術的11.3 ms相比,本文技術在處理速度方面表現出色。在平均處理速度方面,本文技術達到了每秒27.5 幀/s,雖然略低于文獻[1]技術的29 幀/s,但是明顯高于文獻[2]技術的33.5 幀/s。雖然文獻[2]技術的平均處理速度較高,但是其單張圖像處理時間較長,可能影響實際應用的連續性和流暢性。綜上所述,本文技術在保持較高處理速度的同時,顯著縮短了單張圖像的處理時間,有效提升了巡檢系統的整體效率。
測試結果充分驗證了本文技術在輸電線路巡檢中的準確性、高效性以及可靠性,為未來架空輸電線路智能巡檢提供了有力的技術支持。
3 結論
本文研究結合無人機與基于YOLOv3算法的AI模塊完成架空輸電線路的智能化巡檢。在圖像識別方面,AI模塊能夠準確識別輸電線路圖像,并優化損失函數來顯著降低預測誤差,提升模型性能。在技術應用測試中,AI模塊顯示了出色的缺陷檢測能力,對輸電線路安全運行具有重要意義。本文還探討了AI模塊在巡檢過程中的實際應用效果。研究結果表明,基于無人機機載AI模塊研究的架空輸電線路巡檢技術在實際應用過程中效果較好,能夠滿足預期需求。
參考文獻
[1]劉宏杰,陳泊遠.基于無人機低空攝影技術的架空輸電線路智能巡檢方法[J].電工技術,2024(3):80-83.
[2]魯杰,陳建,寧巖,等.基于人工智能的輸電線路無人機巡檢技術分析[J].中國高新科技,2022(16):44-46.
[3]嚴峻超,徐建軍,徐軍波,等.基于“一線兩向”模式下的無人機輸電線路高效巡檢方式研究[J].電子制作,2023,31(12):106-109.
[4]朱濤,朱偉,石一輝,等.基于無人機集群控制輸電線路巡檢技術研究[J].電力設備管理,2024(4):114-116.
[5]劉振華.架空輸電線路無人機遠程自主巡檢關鍵技術研究和應用[J].中文科技期刊數據庫(全文版)工程技術,2022(6):153-156.
[6]聞洪峰.基于AI技術的無人機機載前端智能識別技術研究[J].信息技術與信息化,2023(5):208-211.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26