基于改進YOLOv5s 的交通標志檢測算法
2024-12-25 00:00:00朱碩梁吉豐孫佳豪劉政達董遠遠賓杰
無線電工程 2024年12期


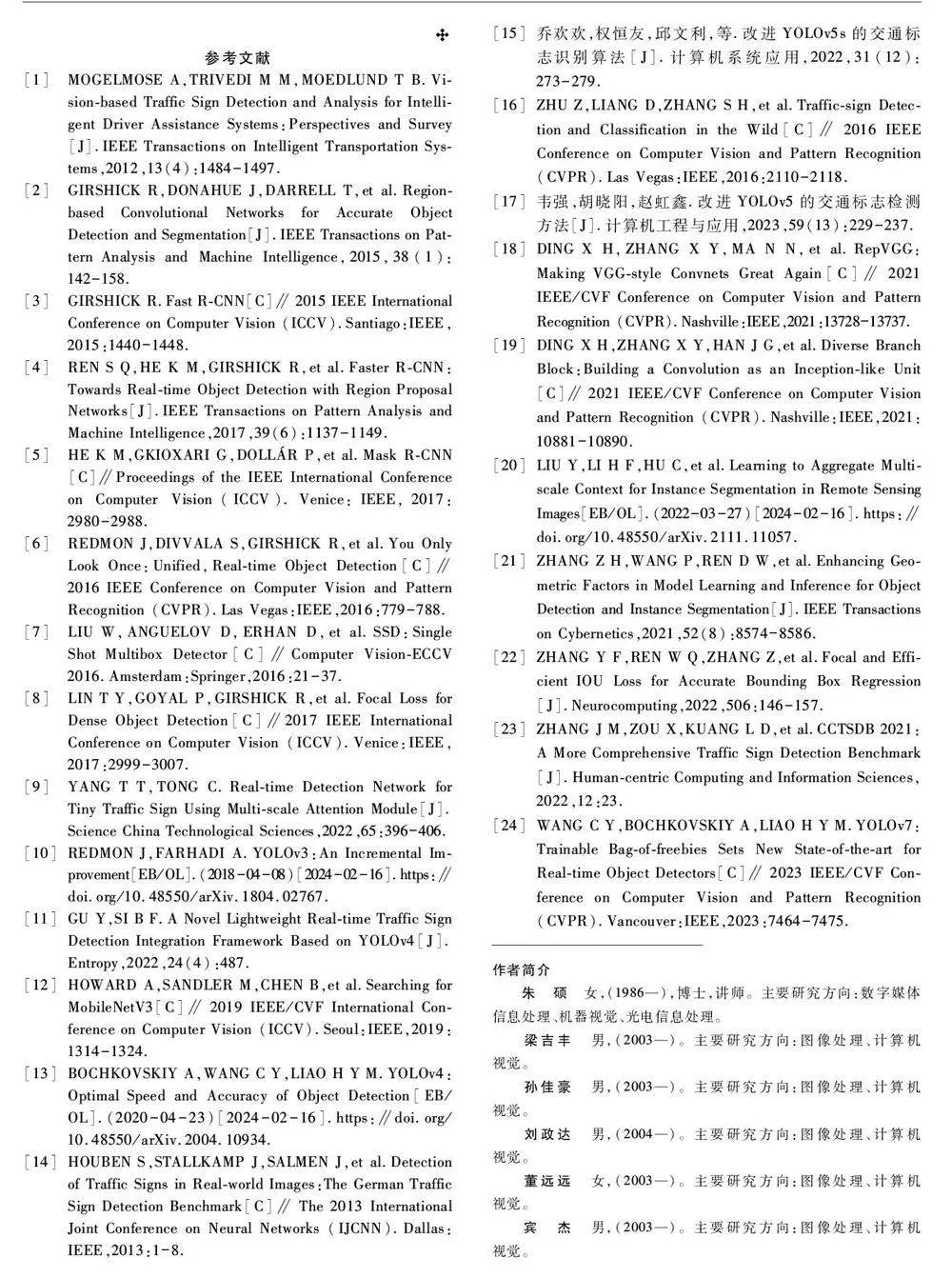
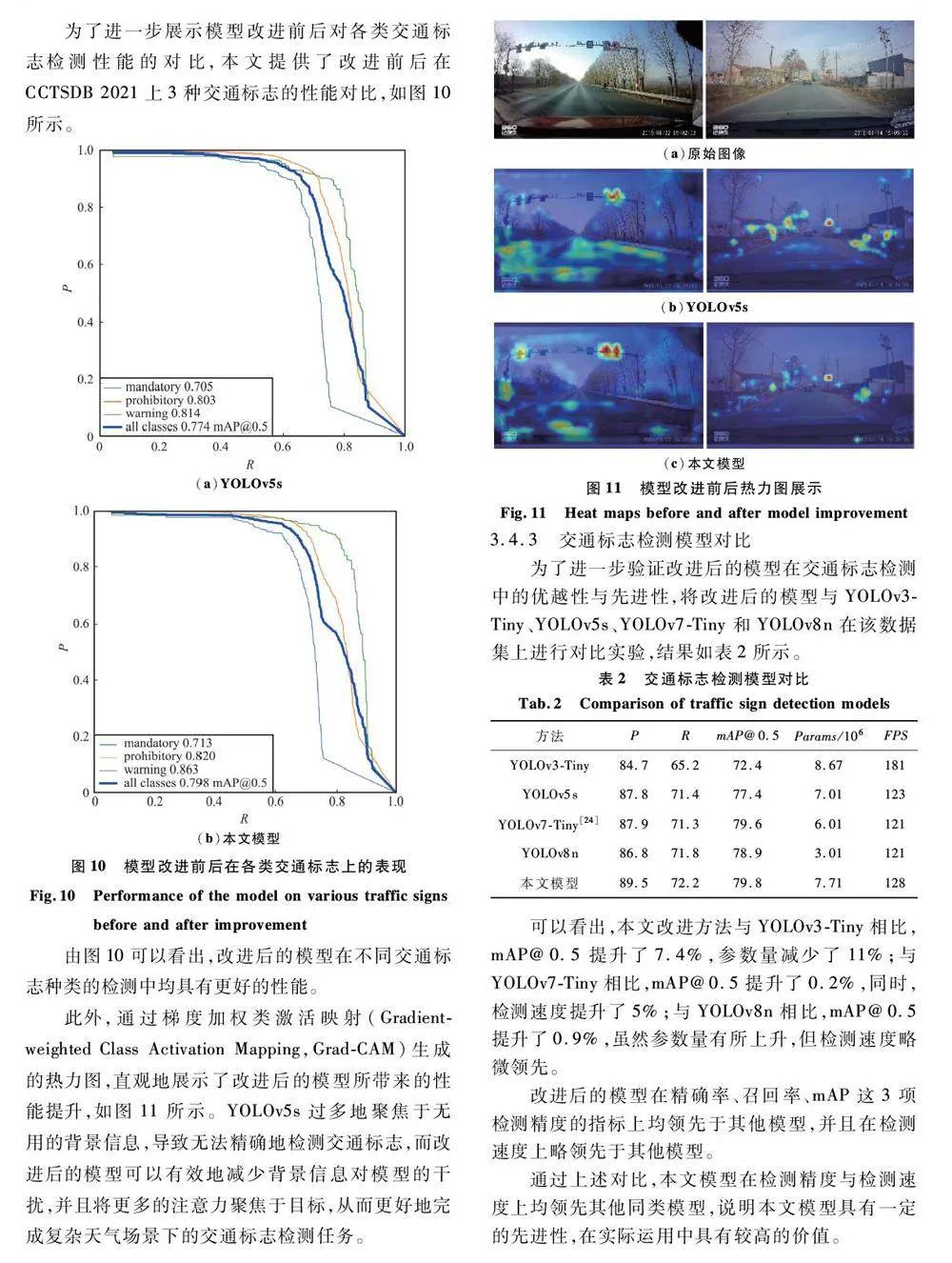
摘 要:針對現有的目標檢測模型對復雜天氣下的交通標志檢測存在漏檢與錯檢的情況,提出了一種改進YOLOv5s 的交通標志識別算法。為提高算法在各種復雜場景下的適應性,設計了一種基于重參數化(ReParameterized,ReP) 的C3 模塊,將其命名為C3_DB;在網絡的Neck 部分引入上下文聚合模塊,使得算法可以聚焦于重點區域的特征,減少復雜背景造成的混淆,從而提升模型的特征提取能力;引入高效交并比(Efficient Intersection over Union,EIoU) 損失函數代替傳統的完全交并比(Complete Intersection over Union,CIoU) 損失函數,提升模型訓練時的收斂速度,進一步提升模型對復雜情景下目標的檢測性能。在中國交通標志數據集CCTSDB 2021 上的實驗結果表明,改進后算法的平均精度均值(meanAverage Precision,mAP) 為79. 8% ,相較于YOLOv5s 提升2. 4% ,檢測速度達到128 幀/ 秒,在檢測性能與檢測速度之間取得了較好的平衡。意味著改進后的算法能夠滿足更高精度的交通標志實時檢測需求,為實際應用提供了可靠的解決方案。研究成果對未來的交通管理和自動駕駛系統的發展具有重要意義,為提高安全性和可靠性提供了新的前景。
關鍵詞:交通標志檢測;重參數化;目標檢測
中圖分類號:TP391 文獻標志碼:A
文章編號:1003-3106(2024)12-2902-11
0 引言
交通標志是用來指示、警示和引導交通的道路設施,其主要意義是保障道路交通安全有序,提醒駕駛員注意道路情況,并規范駕駛員行為。交通標志識別對于自動駕駛環境感知至關重要,幫助自動駕駛系統準確地理解道路環境和交通規則,如當前道路的限速、禁止通行和道路類型等信息,做出安全、高效的駕駛決策。然而,在復雜的交通場景中,標志檢測容易受光照條件、障礙物干擾、標志損壞等因素影響,導致實時性和準確率波動。
交通標志檢測算法大致分為傳統檢測算法和基于深度學習的檢測算法。其中,傳統檢測算法使用手工制作的方式提取顏色、形狀、紋理等特征[1],實時性和魯棒性較差。相比之下,以卷積神經網絡(Convolutional Neural Network,CNN)為核心提取高級特征并處理大量數據的深度學習目標檢測算法不需要人工提取特征的環節,對光照、障礙物遮擋或標志損壞等引起的圖像干擾因素有較強的魯棒性,具有較高的識別效率和檢測精度。基于這些優點,深度學習的檢測算法已成為當下研究的熱點,并廣泛地應用于交通標志檢測。
基于深度學習的檢測算法大致分為2 類:一類是基于區域建議的兩階段檢測算法,例如RCNN[2]、Fast RCNN[3]、Faster RCNN[4]及其改進算法Mask RCNN[5]等。這種檢測方法首先在輸入圖像上生成一系列候選框,然后對這些候選框進行分類和位置回歸,以確定目標的最終檢測結果。這類算法計算量大,檢測速度相對較慢,無法滿足實時檢測場景。另一類是單階段檢測算法,如YOLO[6]、SSD[7]、RetinaNet[8]等算法,可以直接在輸入圖像上進行目標檢測,不需要額外的候選框生成步驟,這類算法具有較快的檢測速度,但檢測精度相對較低,仍需在應用中不斷改進。
Yang 等[9]設計了一種視覺多尺度注意力模塊,修改主干Darknet53 并向網絡中添加一個預測頭,有效地利用了淺層微小物體的細粒度特征,提升了YOLOv3[10]網絡在交通標志場景圖中的檢測性能,但檢測速度較原始網絡有一定的下降。Gu 等[11]使用MobileNetV3[12]結構作為YOLOv4[13]的主干網絡,并通過特征融合與再分配(Feature Fusion andRedistribution,FFR)模塊豐富不同尺度的特征,提高模型檢測準確率,在德國交通標志數據集(GTSDB)[14]上的大量實驗驗證了該模型具有優越的檢測速度,但對于交通標志的識別精度略有降低。喬歡歡等[15] 通過在YOLOv5 的主干網絡中使用C3Ghost 模塊取代原有的C3 模塊,并引入坐標注意力機制,顯著增強了模型對交通標志特征提取的能力,在TsinghuaTencent 100K(TT100K)[16]數據集上的實驗結果表明,改進后的模型在交通標志的檢測任務中具有優越的檢測精度以及檢測速度;然而,由于數據集中的圖片背景主要為晴朗天氣,模型在復雜氣候天氣下的表現尚未經過驗證。韋強等[17]在YOLOv5 網絡中引入遞歸門控卷積、SOCA 注意力機制和回歸損失函數,改進后的模型在CCTSDB 數據集上取得了較高的精度。但是,由于并未使用該數據集提供的包含各種復雜天氣狀況下的困難樣本的測試集對改進后的模型進行驗證,模型的泛化能力以及在復雜天氣下的適用性有待驗證。
在上述研究中,雖然交通標志的檢測精度與速度均實現了顯著的提升,但其模型在復雜氣象條件下的適應性尚未經過驗證。鑒于此,本文基于YOLOv5s 網絡架構,設計了一種改進算法,旨在滿足復雜氣象條件下交通標志的實時檢測需求。具體改進措施包括:
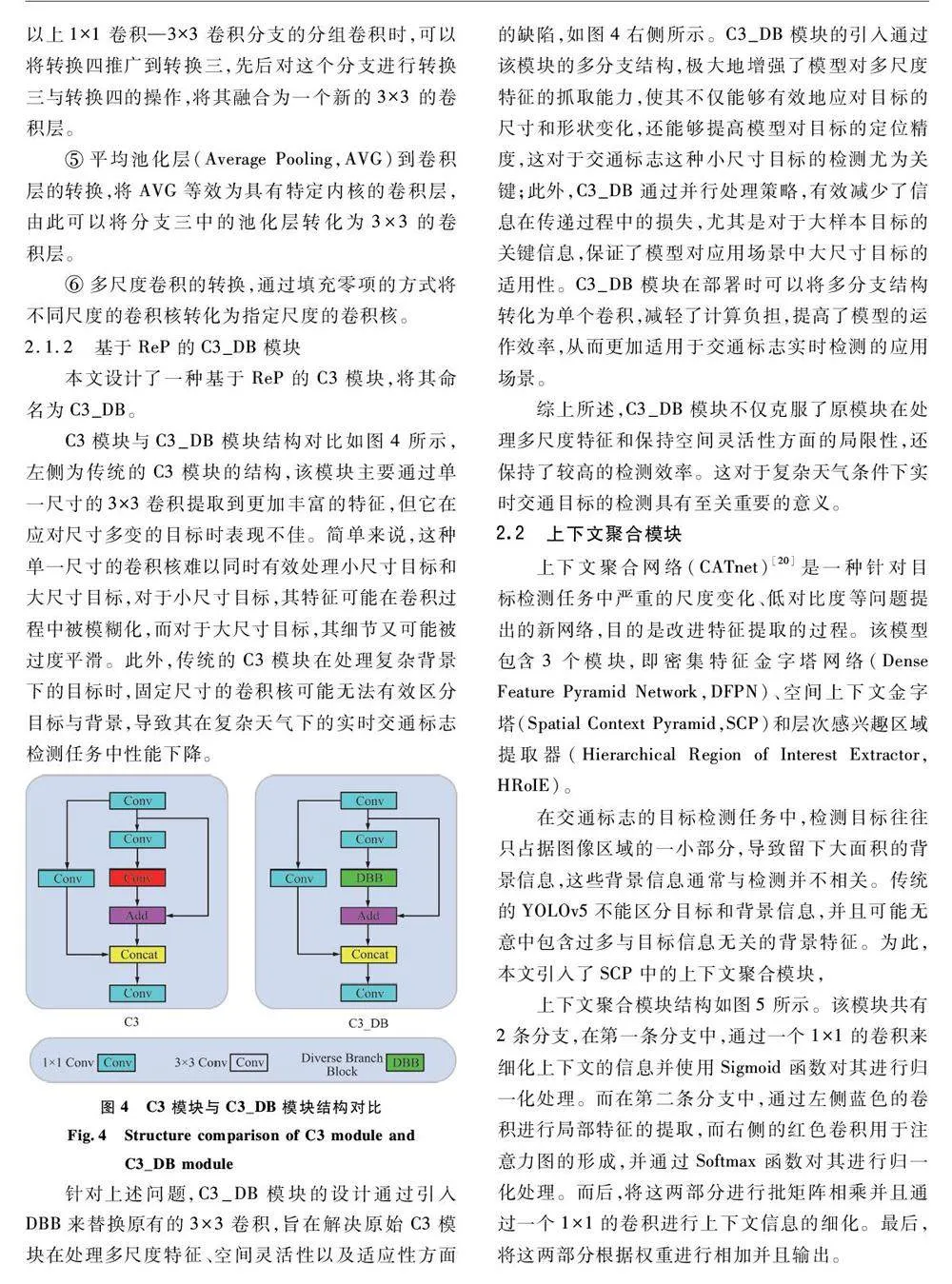
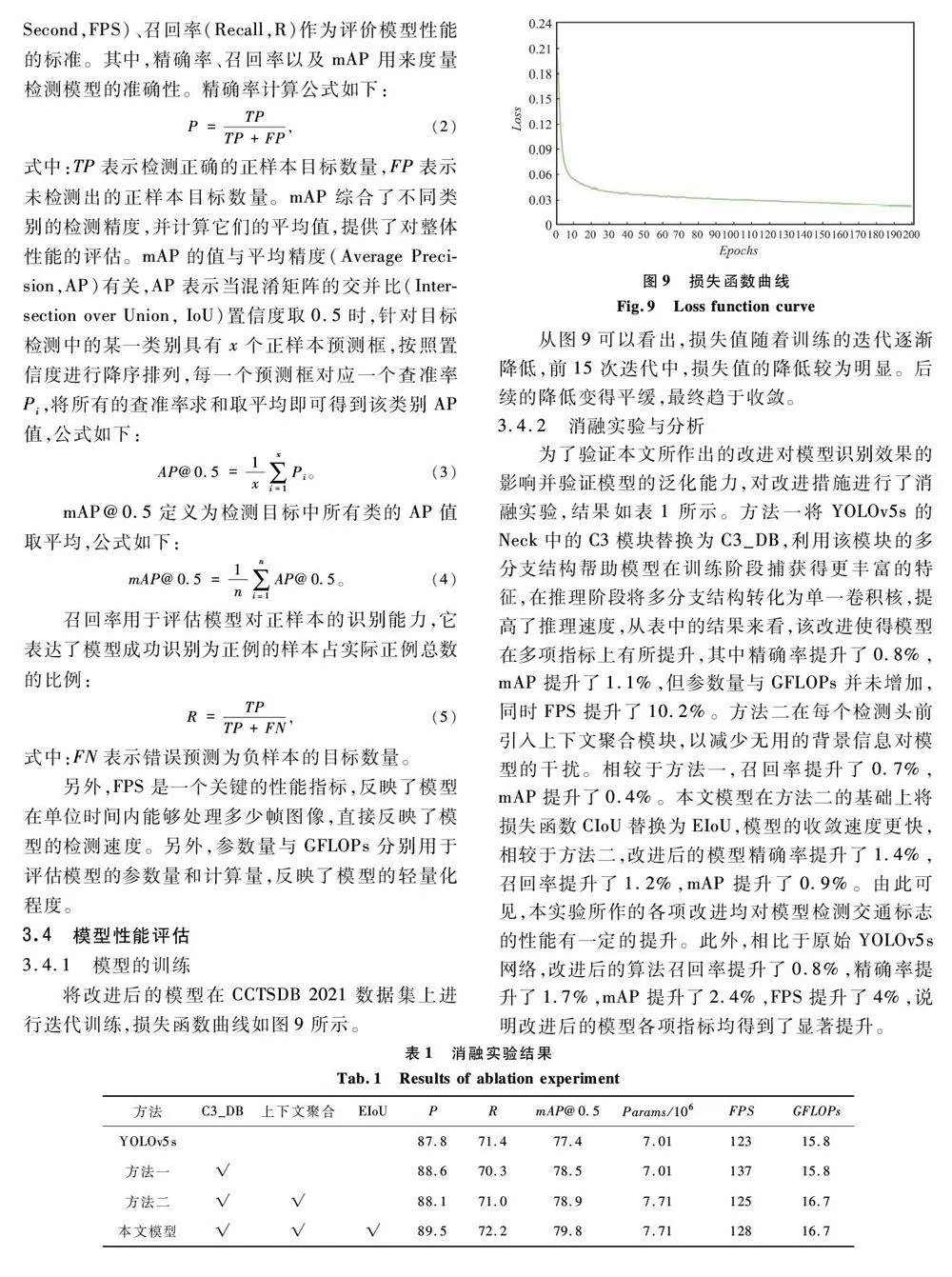
① 設計了C3 _DB 模塊,并將其引入YOLOv5s的頸部網絡,使得模型能夠捕捉到更加豐富多樣的特征信息,從而增強了模型在各種復雜場景下的特征提取能力。
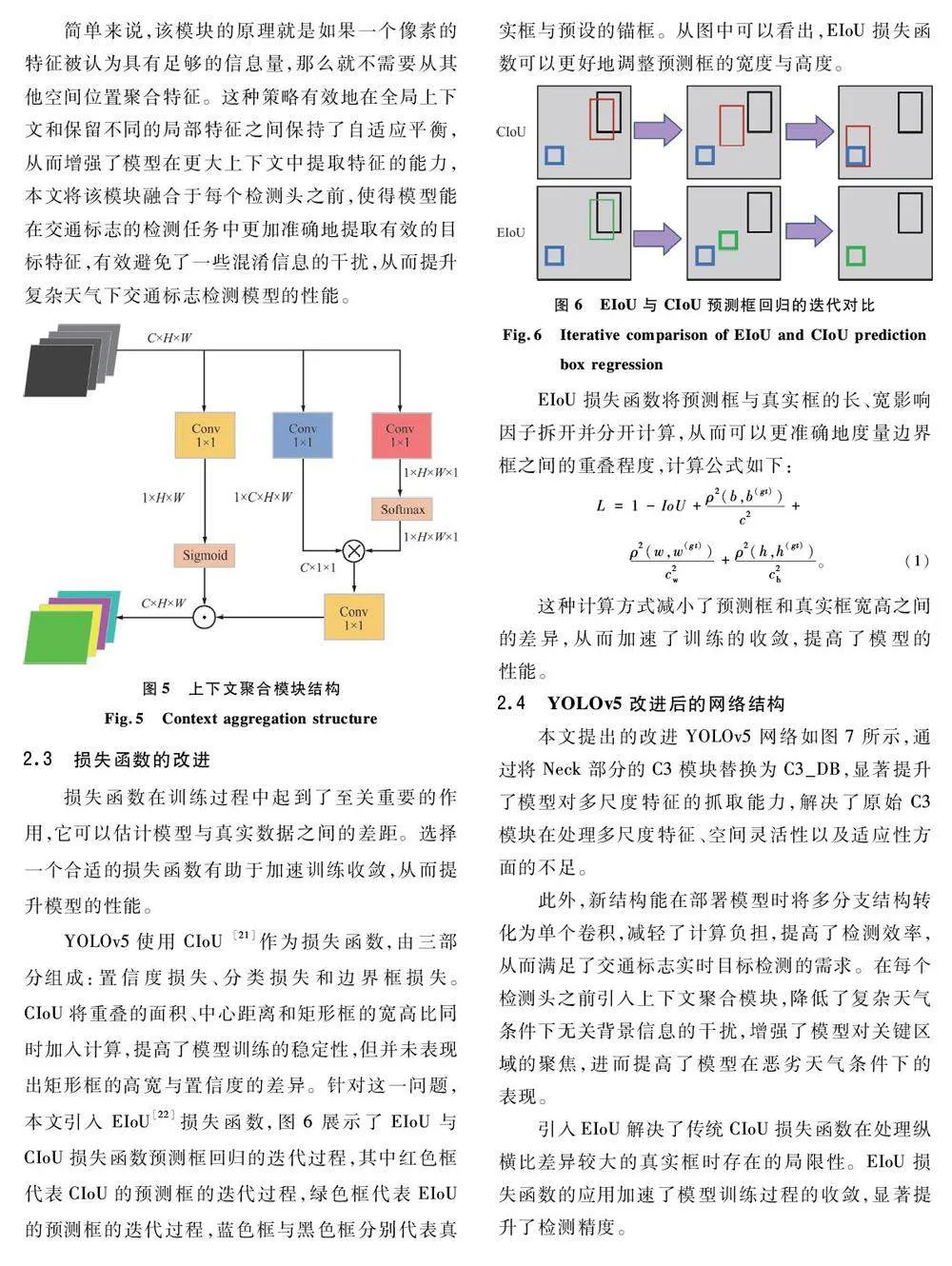
② 在每個檢測頭之前引入了上下文聚合模塊,以增強模型對重點區域的關注程度。該模塊有效地減少了無關背景信息引起的混淆,進一步提升了模型在復雜氣象條件下交通目標檢測的適應性和精確度。
③ 引入了高效交并比(Efficient Intersection overUnion,EIoU)損失函數,解決了傳統完全交并比(Complete Intersection over Union,CIoU)損失函數在處理縱橫比差異較大的真實框時存在的局限性。EIoU 損失函數的應用加速了模型訓練過程的收斂,顯著提高了檢測精度。
綜上所述,本文提出的改進算法不僅在提高檢測精度的同時確保了更快的檢測速度,而且通過創新的模塊設計和損失函數的應用,強化了模型在面對復雜氣象條件時的適應能力和檢測效率。本文算法的開發,對未來交通管理體系及自動駕駛系統的優化與發展具有深遠的意義。
1 YOLOv5 目標檢測算法
YOLOv5 根據網絡模型深度分為YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x,其中,YOLOv5s 模型最小,便于部署到檢測交通標志的設備中。所以選擇YOLOv5s 作為基準模型。YOLOv5s 的網絡結構主要由四部分組成,如圖1 所示。
