基于力矩負反饋的柔性關節機器人自適應分層滑模控制方法
2024-12-28 00:00:00朱敏李文安
機械制造與自動化 2024年6期
摘要:因柔性關節機器人自身動態特性較強,難以捕捉線性變化特性,控制輸出力矩穩定性較差。提出一種基于力矩負反饋的柔性關節機器人自適應分層滑模控制方法。分析機械臂與關節動作之間線性變化關系和慣性規律變化,引入自適應方法,建立慢變子滑膜控制規律函數。創新性地結合力矩負反饋,求解機器人關節狀態與平衡點隸屬度關系求解控制規則,合理控制關節力矩,完成柔性關節機器人自適應分層滑模控制。實驗數據證明:所提方法應用后,控制軌跡與期望軌跡之間差距最小,控制精準度高,適用于多種柔性關節,控制輸出力矩穩定。
關鍵詞:力矩負反饋;柔性關節機器人;自適應分層滑模控制;隸屬度關系;模態求解函數
中圖分類號:TP242文獻標志碼:A文章編號:1671-5276(2024)06-0257-05
Abstract:In order to overcome the difficulty in capturing linear changes and improve the poor stability of control output torque caused by the strong dynamic characteristics of flexible joint robots, a self-adaptive layered sliding mode control method based on negative torque feedback for flexible joint robots is proposed. The linear relationship and inertia law changes between the robotic arm and joint movements are analyzed, and with the introduction of adaptive methods, a slow variable synovial control law function is established. Negative torque feedback is innovatively combined to solve the relationship between robot joint state and balance point membership, joint torque is reasonably controlled, and adaptive layered sliding mode control is completed for flexible joint robots. The experimental data shows that the application of the proposed method results in the smallest difference between the control trajectory and the expected trajectory with high control accuracy, suitable for various flexible joints and stable in control output torque.
Keywords:negative torque feedback; flexible joint robot; adaptive hierarchical sliding mode control; membership relationship; modal solving function
0引言
柔性關節機器人是現階段應用較多的一種,與其他機器人相比,其搭載內置控制器體積更小,動作更加輕快便捷,實用效果俱佳。但考慮到應用空間中存在的一些障礙物等物理條件限制或實際應用限制等問題,需要以現實運行環境條件為基礎。
針對機器人連桿與設備之間易出現的關節碰撞導致控制效果差的問題,相關學者進行了大量研究。文獻[1]提出一種基于非線性級聯系統的機器人關節控制方法。以機器人動作時關節與連桿之間產生的關節角度數為基礎,建立線性變化的動力學模型,按照模型參數設計關節振動反饋函數;根據關節角與振動值之間的線性關系,通過振動比例數值完成滑膜控制。該方法沒有考慮到環境影響問題,對于關節角的精密控制力度不夠,導致存在一定誤差。文獻[2]則以神經網絡作為控制算法設計機器人力矩控制器。采用神經網絡搭建學習模型,將機器人參數輸入至模型中并求解伺服驅動系數。建立關節滑膜控制器,通過控制器輸出完成算法。該方法實際應用局限性較強,控制器數據反饋和響應速度較差,影響實用性。
綜合上述問題,本文采用一種基于力矩負反饋的柔性關節機器人自適應分層滑模控制方法,創新性地建立模態方程并求解當機械臂運動時關節所產生的模態階數,引入自適應分層滑模控制方法提高避障、轉角或其他工作的關節運動精準度,通過控制達到關節和連桿之間的高度耦合狀態以提高運行效率。
1基于力矩負反饋的機器人自適應分層滑模控制方法
1.1柔性關節機器人模態求解
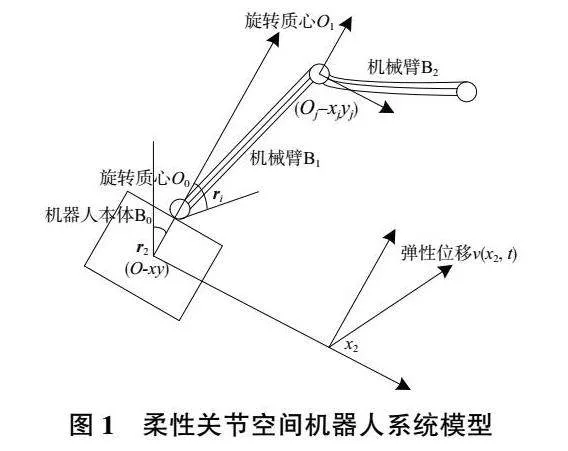
為提高柔性關節機器人滑模控制方法在實際中的應用性能,本文在具體控制工作前建立系統模型,分析關節動作的線性變化,將線性變化參數[3]作為后續控制參照條件,大大提高了控制精準度。建立柔性關節機器人系統模型如圖1所示。其中,B0表示機器人本體;B1表示剛性機械臂;B2表示柔性機械臂;O0、O1表示連桿與關節之間旋轉質心[4]。建立慣性坐標系(O-xy)以及關于各個機械臂分體Bj(j=0,1,2)的坐標軸(Oj-xjyj)。假設,各個關節分體在一個二維平面(O-xy)內進行運動,得到本體B0的質心Oci運行慣性關系。
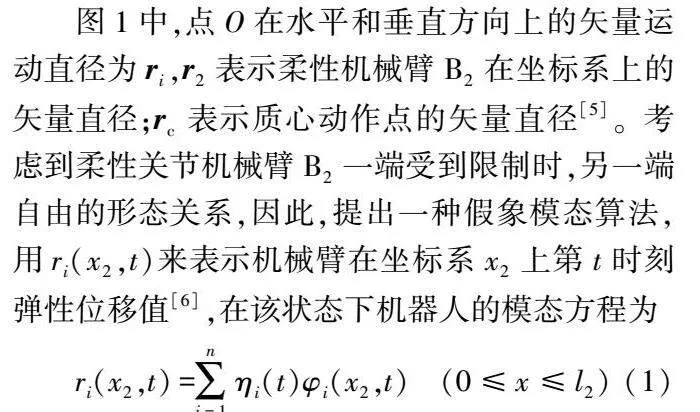
圖1中,點O在水平和垂直方向上的矢量運動直徑為ri,r2表示柔性機械臂B2在坐標系上的矢量直徑;rc表示質心動作點的矢量直徑[5]。考慮到柔性關節機械臂B2一端受到限制時,另一端自由的形態關系,因此,提出一種假象模態算法,用ri(x2,t)來表示機械臂在坐標系x2上第t時刻彈性位移值[6],在該狀態下機器人的模態方程為
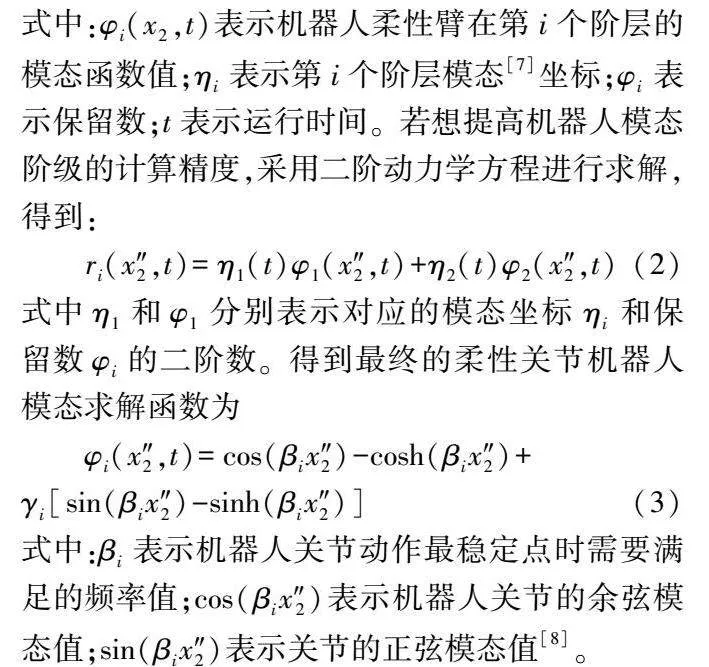
式中:φi(x2,t)表示機器人柔性臂在第i個階層的模態函數值;ηi表示第i個階層模態[7]坐標;φi表示保留數;t表示運行時間。若想提高機器人模態階級的計算精度,采用二階動力學方程進行求解,得到:
式中η1和φ1分別表示對應的模態坐標ηi和保留數φi的二階數。得到最終的柔性關節機器人模態求解函數為
式中:βi表示機器人關節動作最穩定點時需要滿足的頻率值;cos(βix″2)表示機器人關節的余弦模態值;sin(βix″2)表示關節的正弦模態值[8]。
通過上述過程即可完成柔性關節機器人系統數學模型構建,并得到柔性關節機器人動作穩定和模態之間的正向關系。
1.2引入自適應策略
1)慢變子滑膜控制規律函數
柔性關節機器人在運動時其關節會產生系統轉角誤差,同時還會出現柔性振動問題。這些問題都是影響自適應滑膜分層控制精準度的因素。為了提高機器人自適應分層滑模控制[9]方法在多種環境下的應用性能,建立慢變子系統控制規律,給出如下定義:
按照自適應滑膜控制原理,根據上述過程的大水平柔性關節機器人的動態特性來切換超平面,設計滑膜控制器,當系統處于滑膜控制面時,控制系統沿切換超平面向原點滑動[10],該過程稱之為自適應滑膜控制過程。所提方法將其與力矩負反饋矩陣[11]相結合,通過力矩矩陣來約束并輸出最佳滑動控制參數,使得控制值與期望值不斷逼近,提高控制精準度和算法的環境應用能力。建立慢變子滑膜控制規律函數λ(x)為
式中:e表示切換前控制參數矩陣;λ表示慢變子因值。通常情況下,柔性關節機器人的穩定運動需要遵循慢變子和控制規律,保證二者之間的關系平衡,在該狀態即可達到最大運行狀態tgt;0,limt→SymboleB@e″=0,其中t表示運行時間。
2)機器人關節動力狀態與滑膜參數計算
根據控制率建立關節穩定參數函數[12]:
式中:y表示機械臂滑膜量;M(q0,q)表示對稱正定矩陣;q表示機器人力矩的實際輸出向量;q0表示期望輸出向量;Kp表示正定對角矩陣。
對式(5)中的穩定參數V進行求導,結合式(4)給出的機器人關節滑膜切換函數以及慢變子系統[13]控制定律,可得到機器人關節動力狀態與滑膜參數:
利用式(4)和式(6),將上式改寫為
式中:Kv表示負正定對角矩陣;u表示關節角控制質量;v表示關節角控制轉速;e″T表示滑膜周期切換控制參數;sT表示控制變量。將機器人的關節參數輸入至模態矩陣中,即可得到當下時刻機器人進行關節運動時最穩定點的控制參數,將該值作為后續控制函數[14]約束的參照,提高控制精準度。
1.3力矩負反饋下的控制規則求解
考慮到實際環境中可能存在力矩受限的情況,將滑膜控制規律改進為如下形式:
式中:τs表示機器人實時輸出的力矩幅值;tanh(ξ)表示滑膜控制規律序列,tanh(ξ)=[tanh(ξ1),tanh(ξ2),…,tanh(ξn)]T。通過式(9)可以看出,該方法通過限制柔性關節機器人力矩幅值大小的方式來達到控制目的。
但需要特別注意的是在滑膜控制的參數切換過程中可能出現抖動現象,影響控制效果。為了消除這種不穩定的振動現象,采用自適應滑膜控制理論得到最終的控制規則如下:當機器人關節狀態偏離平衡點較遠時,需要選擇較大的滑膜邊界寬度ζ;當機器人關節狀態偏離平衡點較近時,需要選擇較小的滑膜邊界寬度ζ。定義模糊控制語言[15]為:PL正大,PM正中,PS正小;y、y″為控制單元的狀態輸入值。
給出機器人的模糊控制規則為:
當y為PL且y″為PL時,ζ設定為PM;當y為PL且y″為PS時,ζ設定為PL;當y為PS且y″為PL時,ζ設定為PM;當y為PS且y″為PS時,ζ設定為PS。
通過對與關節運動相關聯的其他參數進行不斷調整,滿足機器人所需的實際工況需求。在滑模控制器的設計中,可以將機器人模糊控制規則作為一個參考信號進行反饋控制,提高了控制系統的魯棒性和穩定性。同時,滑膜控制規則可以幫助機器人更準確地感知環境,快速適應外部干擾和變化,提高控制方法的實用性和適應性,從而實現更為高效的柔性關節機器人控制。
2性能測試
2.1測試環境
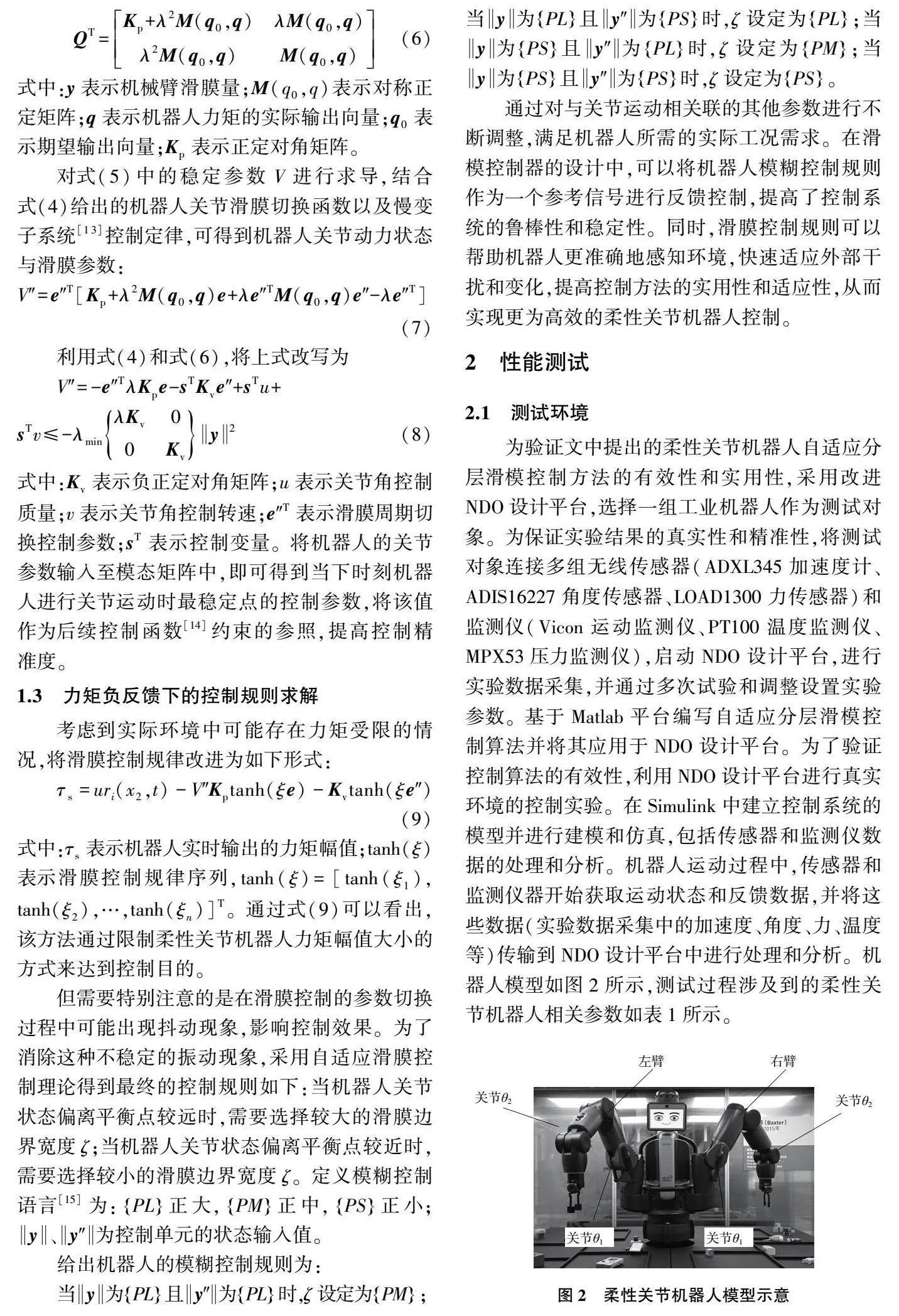
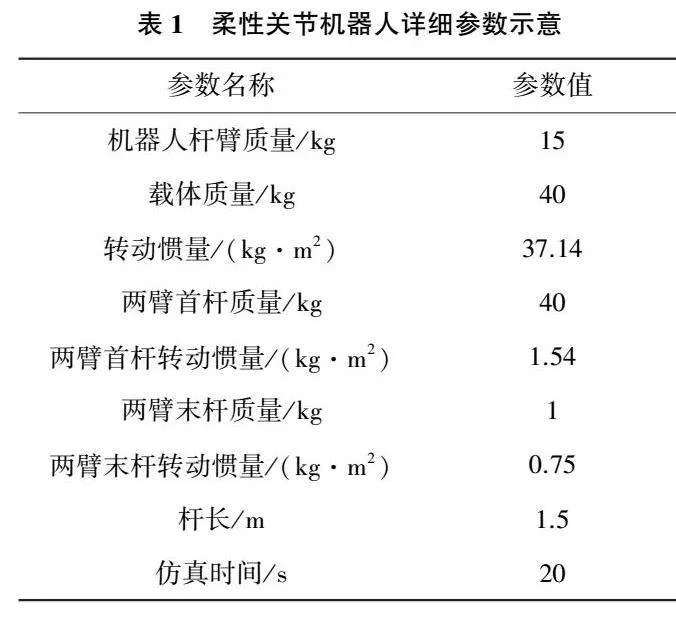
為驗證文中提出的柔性關節機器人自適應分層滑模控制方法的有效性和實用性,采用改進NDO設計平臺,選擇一組工業機器人作為測試對象。為保證實驗結果的真實性和精準性,將測試對象連接多組無線傳感器(ADXL345加速度計、ADIS16227角度傳感器、LOAD1300力傳感器)和監測儀(Vicon運動監測儀、PT100溫度監測儀、MPX53壓力監測儀),啟動NDO設計平臺,進行實驗數據采集,并通過多次試驗和調整設置實驗參數。基于Matlab平臺編寫自適應分層滑模控制算法并將其應用于NDO設計平臺。為了驗證控制算法的有效性,利用NDO設計平臺進行真實環境的控制實驗。在Simulink中建立控制系統的模型并進行建模和仿真,包括傳感器和監測儀數據的處理和分析。機器人運動過程中,傳感器和監測儀器開始獲取運動狀態和反饋數據,并將這些數據(實驗數據采集中的加速度、角度、力、溫度等)傳輸到NDO設計平臺中進行處理和分析。機器人模型如圖2所示,測試過程涉及到的柔性關節機器人相關參數如表1所示。
2.2機器人自適應分層滑模控制結果對比分析
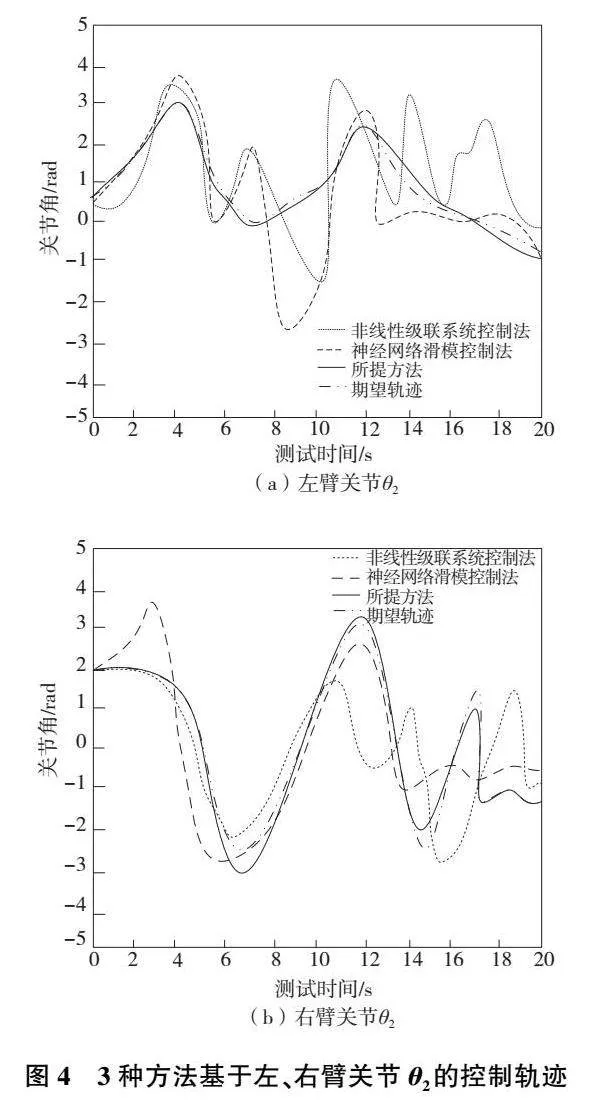
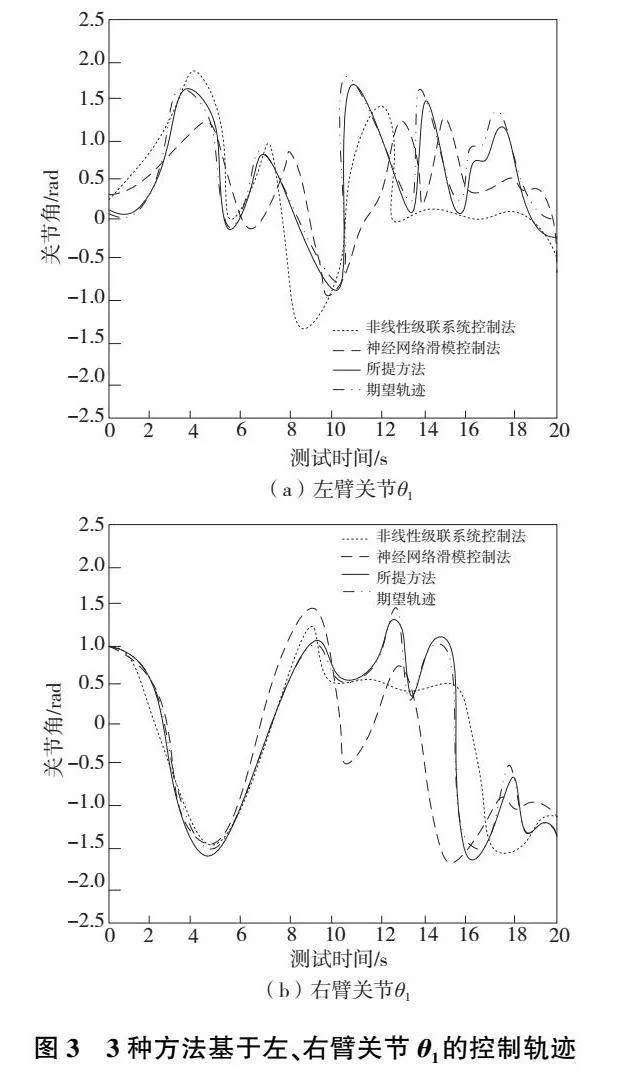
以圖2給出的柔性關節機器人為控制對象,設定左臂和右臂分別進行不同的動作。根據現場傳感器數據給出機器人的實際運動軌跡和期望運動軌跡數據,與基于非線性級聯系統的機器人控制方法、基于神經網絡滑模控制器的機器人控制方法進行對比分析,并以左關節、右關節分別進行對比測試。3種方法的控制軌跡如圖3和圖4所示。
從圖3中可以看出,3種方法基于左、右臂關節θ1的控制結果整體變動差距不大,因為θ1在左、右臂上的位置動態特性不強,進行運動產生的關節角較小。從3種方法的細節比對可以看出,所提方法的控制軌跡與期望軌跡之間差距最小,變化最為吻合,沒有出現大幅度的控制差異。反觀另外2種方法,整體控制軌跡與理想值偏差較大,在多處位置均存在軌跡偏離現象且表現較為嚴重。
由圖4中可知,基于左、右機械關節θ2的控制軌跡結果來看,3種方法中只有所提方法最貼合期望控制軌跡,控制偏差較小;而另外2種方法與期望軌跡之間的控制誤差較大。說明分層滑膜控制效果較好,出現偏差較小,提高了機器人的實際應用能力。這是因為所提方法中引入了力矩的反饋信息,可以更加準確地描述機器人的動態特性,提高了控制系統的魯棒性和控制精度。
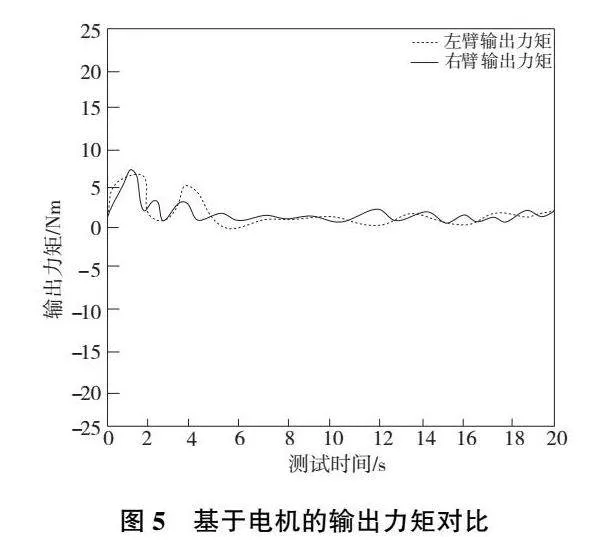
2.3基于電機的輸出力矩的控制結果分析
為驗證控制算法的整體實用性能,當測試所提方法達到目標控制結果時,產生的電機輸出力矩大小,實驗結果如圖5所示。
從圖5中可以看出,在所提方法的力矩負反饋混合方法控制下,柔性關節機器人系統完成期望軌跡所需的力矩幅值明顯變小,說明基于所提方法只需要較小的力矩控制量即可達到目標控制結果。這是因為所提方法采用了自適應分層滑模控制,能夠自主地調節每個子系統的控制策略,根據實際環境和任務需求,靈活地進行控制優化,而并非需要手動調節或根據經驗設計和優化控制器。因此,應用所提方法,機器人在多種環境下的適應能力變強,控制效率較高,具有一定的實用價值。
3結語
本文提出了一種基于力矩負反饋的柔性關節機器人自適應分層滑模控制方法。經測試后得出以下結論。
1)將所提方法應用在機械臂控制中,左、右臂關節的控制軌跡誤差較小。該方法可以有效控制柔性關節機器人的運動,具有較強的魯棒性和空間描寫能力,能夠保持較高的控制精度。
2)將所提方法應用在機械臂控制中,電機的輸出力矩幅值較小,表明控制器能夠根據關節狀態及時調整電機輸出的力矩,保證機器人運動的穩定性和安全性。
3)所提方法可以有效地解決機器人運動過程中的動力學耦合問題,并且能夠通過傳感器直接測量關節輸出的力矩,無需進行額外的力學建模和校準。
綜上所述,基于力矩負反饋的柔性關節機器人自適應分層滑模控制方法可大幅度提升控制精準度,避免產生誤差,并且具有較強的穩定性,在多種環境下均能高效適用。
參考文獻:
[1] 梁捷,秦開宇,陳力. 基于非線性級聯系統的彈性關節空間機器人新型滑模控制[J]. 力學與實踐,2021,43(4):544-554.
[2] 劉建華,夏志剛,周賢鋼,等. 基于神經網絡滑模控制器的外骨骼機器人力矩控制器設計[J]. 湘潭大學學報(自然科學版),2021,43(5):41-50.
[3] 劉宜成,熊宇航,楊海鑫. 基于RBF神經網絡的多關節機器人固定時間滑模控制[J]. 控制與決策,2022,37(11):2790-2798.
[4] 王君,程浩,姜榮俊,等. 基于滑模反饋的履帶式機器人自適應軌跡跟蹤[J]. 組合機床與自動化加工技術,2023(1):25-28,33.
[5] 尤鑫燁,陳力. 考慮摩擦特性的柔性關節空間機器人自適應CMAC神經網絡魯棒控制[J]. 計算力學學報,2022,39(2):192-197.
[6] 張文輝,陳浩文,聞志,等. 面向未知目標的柔性關節空間機器人滑模控制[J]. 空間控制技術與應用,2021,47(3):49-56.
[7] 馮鈞,孔建壽,王剛. 基于模糊補償的多關節機器人自適應神經滑模控制[J]. 模糊系統與數學,2021,35(5):65-75.
[8] 李俊陽,趙琛,夏雨,等. 基于改進LuGre摩擦模型的機器人關節模糊自適應反步控制[J]. 湖南大學學報(自然科學版),2022,49(10):147-156.
[9] 苗雙全,張寶泉,王明超,等. 基于擾動觀測器的機載光電穩定平臺自適應指數時變滑模控制[J]. 兵工學報,2022,43(7):1636-1645.
[10] 李廣有,王娜,尹慶華. 欠驅動AUV基于干擾觀測器的滑模控制[J]. 機械制造與自動化,2022,51(2):177-180.
[11] 雷軍委,肖支才,白祥軍. 基于柔化與抗飽和函數的高超聲速飛行器自適應滑模控制研究[J]. 戰術導彈技術,2021(4):117-123,131.
[12] 謝進進,廖鶴,姚闖,等. 采用MSCMG群的衛星平臺敏捷機動控制地面閉環試驗驗證[J]. 宇航學報,2021,42(9):1119-1127.
[13] 張雷,王子浩,孫逢春,等. 四輪輪轂電機驅動智能電動汽車轉向失效容錯控制研究[J]. 機械工程學報,2021,57(20):141-152.
[14] 王群京,劉中陽,李國麗,等. 基于自適應干擾觀測器的永磁球形電機連續非奇異終端滑模控制[J]. 電機與控制學報,2022,26(8):66-78.
[15] 趙子乾,張寧,殷國棟,等. 基于差動制動的汽車拖車組合系統動態穩定性滑模控制[J]. 東南大學學報(自然科學版),2021,51(4):687-693.
收稿日期:20230529
基金項目:云南省自然科學基金項目(202056895645)
第一作者簡介:朱敏(1977—),女,云南石屏人,講師,碩士,研究方向為柔性制造技術、硫酸真空泵等,lyq668725@163.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.051
