基于小波重構-Autoformer的無人機融合空域飽和流量預測
2024-12-31 00:00:00喬英聰馬昕陳相佐馬熊
計算機應用研究 2024年11期
關鍵詞:無人機











摘 要:為實現融合空域無人機的飽和流量預測,提出了一種基于小波重構-Autoformer(WR-Autoformer)的無人機飽和流量預測方法。首先使用小波變換分解交通流量數據,以減弱噪聲的影響,凸顯數據特征;然后利用Autoformer模型的深度分解機制與自相關機制進行基礎預測;考慮影響飽和流量的關鍵因素引入了三個無人機流量校正系數;最后結合無人機飽和流量計算方法輸出無人機融合空域的飽和流量預測。經過驗證,WR-Autoformer模型在48 h和96 h的預測中,平均絕對誤差和均方誤差都有13%~48%的降低,預測的飽和流量相比現狀提高了36%~38%。實驗結果證明所提模型可以實現準確預測與無人機融合空域飽和流量的提升,同時無人機縱向間隔滿足了A類航空器的安全要求。
關鍵詞:航空運輸;無人機;飽和流量預測;小波重構;Autoformer;融合空域
中圖分類號:U8 文獻標志碼:A
文章編號:1001-3695(2024)11-030-3409-06
doi: 10.19734/j.issn.1001-3695.2024.03.0098
Saturation flow prediction method for UAV in fusion airspace based on wavelet reconstruction-Autoformer
Qiao Yingcong, Ma Xin?, Chen Xiangzuo, Ma Xiong
(College of Air Traffic Management, Civil Aviation Flight University of China, Guanghan Sichuan 618300, China)
Abstract:To achieve the prediction of UAV saturation flow in fusion airspace, this paper proposed a UAV saturation flow prediction method based on wavelet reconstruction-Autoformer (WR-Autoformer). Initially, traffic flow data was decomposed using wavelet transformation to mitigate the impact of noise and highlight data characteristics. Subsequently, it utilized the Autoformer model’s deep decomposition mechanism and autocorrelation mechanism for foundational prediction. Considering the key factors affecting saturation flow, it introduced three UAV traffic correction coefficients . Finally,it outputted the UAV saturation flow prediction for fusion airspace by combining the UAV saturation flow calculation method. Upon verification, the WR-Autoformer model has reduced the average absolute error and mean squared error by 13% to 48% in 48 h and 96 h forecasts, and the predicted saturation flow has increased by 36% to 38% compared to the current state. The experimental results prove that the proposed model can achieve accurate predictions and enhance the saturation flow of UAV in fusion airspace, while the vertical separation of UAV meets the safety requirements for class A aircraft.
Key words:air transportation; UAV; prediction of saturation flow; wavelet reconstruction; Autoformer; fusion airspace
0 引言
早在2014年,NASA提出了建立超低空域的無人機交通管理系統(unmanned aircraft system traffic management,UTM)[1]。2018年美國航空航天局(National Aeronautics and Space Administration,NASA)首次定義了城市空中交通(urban air mobility,UAM)[2]。相對于經典地面交通模式,UAM有著顯而易見的優勢——安全、高效。2022年,中國民用航空局發布了《民用無人駕駛航空發展路線圖V1.0 (征求意見稿)》,其中提到:“2030年,城市中短距離快速中小型物流配送無人駕駛航空器逐步應用;支線中途高空噸級大型無人駕駛航空器逐步應用;中距離載人無人駕駛航空器探索應用”。并提出“先載貨后載客,先通用后運輸,先隔離后融合的發展路徑”,表明了安全至上的原則。在未來無人機的商業化常態化運行情況下,無人機將會大量參與到融合空域的運行之中[3]。準確的無人機交通流量預測結果能夠為空中交通管理部門的規劃和管理提供了有效依據,能夠為無人機融合空域安全運行提供先期數據支撐。由此,融合空域發展可以分為三個階段,如圖1所示,從完全的隔離運行過渡到有限度的融合運行再到完全的融合運行。實現融合空域最終形式的運行需要現行的通信、導航、監視和空管技術的大幅度提升,需要更高效安全的飛行沖突的解脫手段。現階段各方面技術尚未滿足融合空域最終形態的基本要求,融合空域的研究探索從初級形式起步。
現今實驗性融合空域的無人機運行大多參照有人機運行情況進行,由于有人機與無人機的巨大差異,融合空域無人機的運行效率不高。高度程序化且少量人工干預運行的無人機,最大程度減少了突發事件的影響[4]。根據交通流三要素關系可知:在一定的速度范圍內,速度越低,允許的安全運行間隔越小,單位時間通過的飛行器數量越大。合理的飽和流量預測可以盡可能保證融合空域無人機的高效率運行。然而目前無人機飽和流量預測的研究較少,不能為空中管制部門的融合空域的發展與規劃提供足夠的參考與建議,問題亟待解決。
前些年交通流量的預測方法可以大致分為傳統的時間序列模型以及機器學習方法。自回歸差分移動平均模型(autoregressive integrated moving average model,ARIMA)[5]等典型常用的時間序列模型需要原始數據具有較為明顯的線性特征,如果想要得到較好的預測結果需要對原始交通流量數據進行周到的處理。機器學習如支持向量機(support vector machine,SVM)[6]等模型是一類數據驅動預測的模型,其對數據平穩性的要求不高,但是預測精度高度依賴數據集的質量。交通流量數據微觀上存在明顯的局部無序性,以往的一些經典算法預測結果雖然可以成功預測交通流量的宏觀趨勢,但微觀上的預測結果大大偏離了實際情況。
近些年深度學習在許多研究領域都取得了更好的效果,越來越多的深度學習模型[7]應用到交通流量預測的解決當中。卷積神經網絡(convolutional neural network,CNN)、長短期記憶遞歸(long short term memory,LSTM)神經網絡等經典深度學習模型常用來解決交通流量預測問題。Fu等人[8]提出了LSTM-GRU混合模型,通過利用遺忘門和更新門記憶長期依賴型。Yan等人[9]將LSTM與XGBoost結合并綜合氣象因素預測了機場進場流量。Liu等人[10]考慮交通流量數據噪聲,提出了基于小波重構的卷積神經網絡交通流量預測模型。Gao等人[11]從不同的時間尺度提取特征提出了改進CEEMDAN-FE-TCN交通流量預測模型。Wang等人[12]通過多尺度混合分解時間序列得到了較好的預測效果。Zeng等人[13]通過對序列分解后的趨勢與剩余序列分別建模預測,增強了時間序列的可預測性。最近幾年,為了提高對時序數據建模的效果和效率,一些學者提出了Transformer[14]、Reformer[15]、Informer[16]等算法,通過注意力機制試圖捕捉時間序列的前后依賴關系。周楚昊等人[17]提出了MCST-Transformer交通流量預測方法通過多通道的方式提取流量變化規律提高了交通流量預測精度。付恩等人[18]提出了基于頻率分解的Transformer方法,通過處理原始數據的頻率分量區分趨勢與噪聲,實現了預測精度的提高。Liu等人[19]提出了MTS-Informer模型,從序列中提取局部信息進行更準確的流量預測,這些模型直接使用了自注意力機制,仍然不容易從中找到可靠的時間依賴。為了避免這種問題,Wu等人[20]提出了Autoformer模型,將序列分解預處理替換為深度分解架構,并提出自相關機制代替注意力機制。Feng等人[21]提出了一種ECC機制改進了Autoformer模型,實現了對空氣質量指數的預測。Wang等人[22]改進自相關機制,利用多元線性回歸模型描述各因素影響獲得了穩定數據序列和更精確的預測結果。大多數學者關注如何挖掘數據特征或通過擴展數據維度進行預測研究。然而與其他時序數據不同,交通流量數據微觀上存在著局部無序性,其更雜亂的數據噪聲影響著這些深度學習模型對交通流量數據的細微變化的感知,當面對此類時序數據時,這些深度學習預測模型的表現并不理想。
針對以上問題,本文提出了一種基于小波重構Autoformer的融合空域無人機飽和流量預測模型。該模型通過對原始交通流量數據進行小波重構處理,降低了流量數據微觀上的影響,改善了Autoformer模型對數據特征的感知能力,使其更適用于交通流量預測問題。另外,鑒于目前有關無人機飽和流量預測的研究較少,行業尚未確定融合空域無人機流量計算方法,本文基于交通工程領域內的道路信號控制方法提出了一種新的無人機飽和流量計算方法。該方法考慮了實際運行因素設計了三個影響無人機飽和流量的系數:無人機基本流量校正系數、無人機機型校正系數、無人機區域校正系數。
1 基于小波重構-Autoformer的無人機飽和流量預測模型
1.1 模型總體工作流程
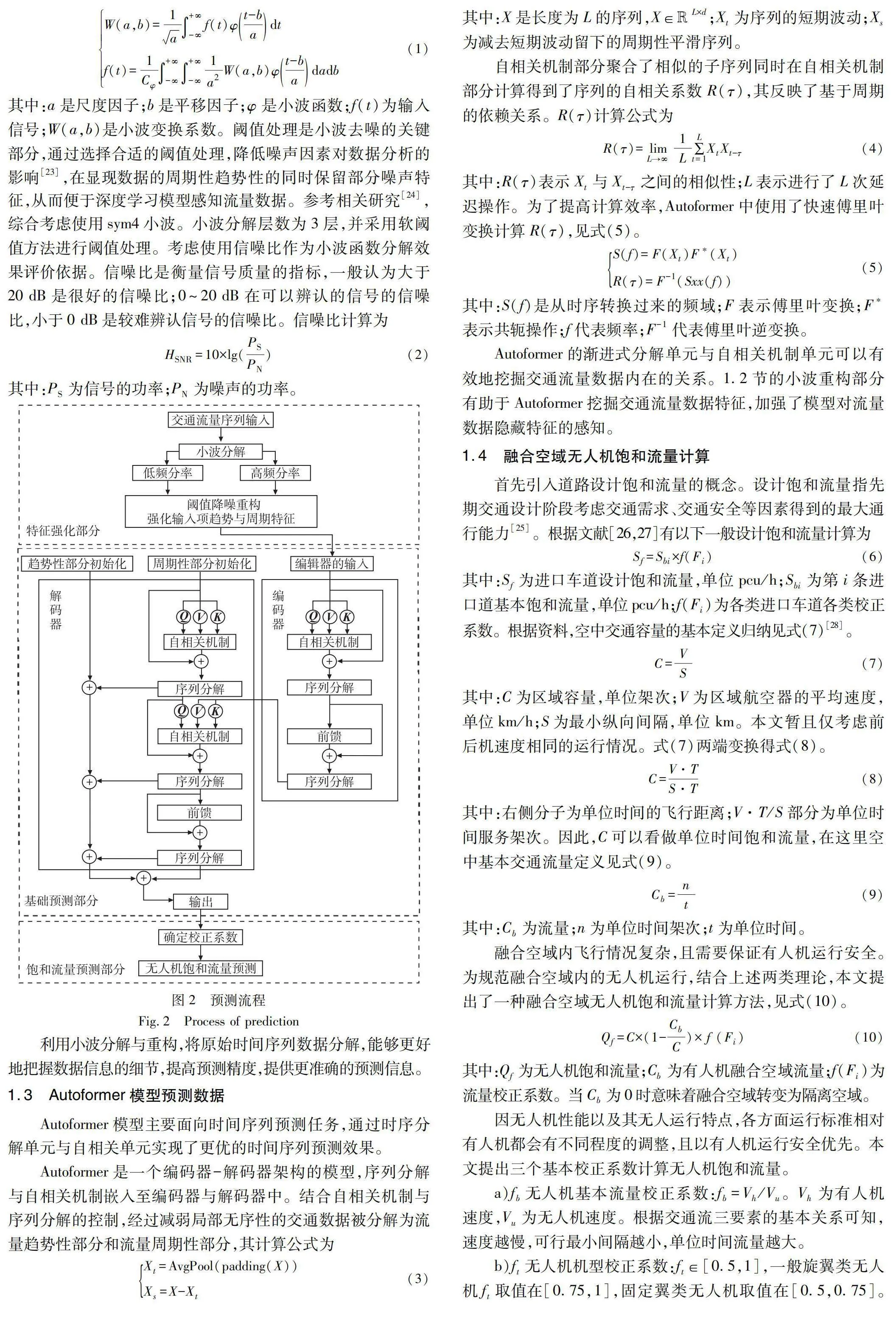
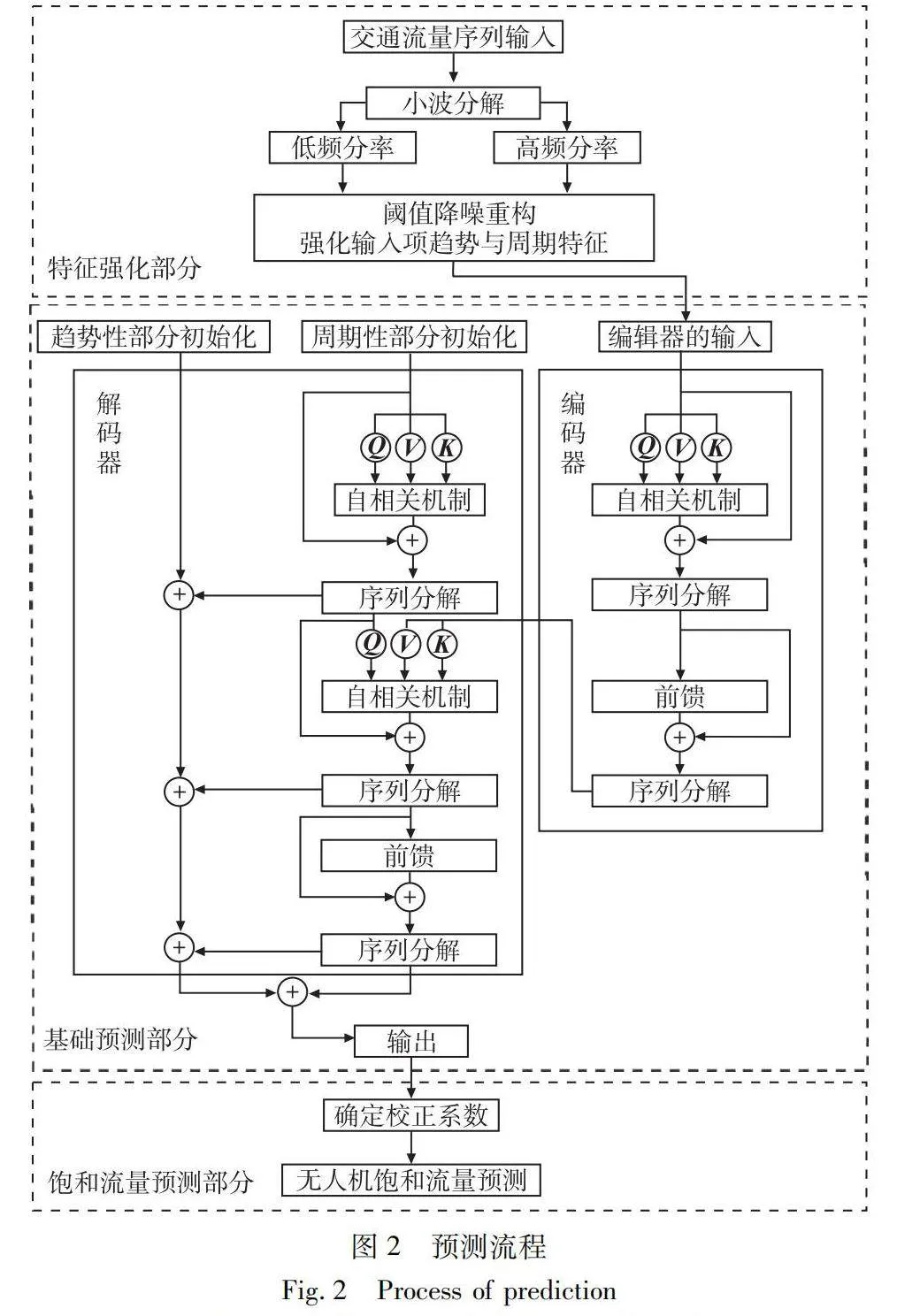
本文在Autoformer模型基礎之上進行改進,具體融合空域無人機飽和流量預測模型流程如圖2所示,模型由特征強化、基礎預測、飽和流量預測三個部分組成。首先,在特征強化部分,將原始交通流量數據輸入至小波分解重構模型,通過小波分解對交通流量數據進行數據降噪處理,減弱交通數據的局部無序性影響;其次,在基礎預測部分,將減弱局部無序性的交通流量數據輸入至Autoformer編碼器,通過其深度分解機制以及自相關機制得到解碼器的輸出;最后,在飽和流量預測部分,依據設定的環境確定流量校正系數,通過本文提出的飽和流量計算方法輸出融合空域的預測飽和流量。
1.2 小波重構
交通流量數據的局部無序性噪聲影響了深度學習模型對數據特征的感知。然而在預測工作中并不可以完全舍棄,這是因為交通流量數據的隨機性噪聲帶來的滯后性影響了后續交通流量的變化。如果一味地去除噪聲反而會影響深度學習模型感知交通流量數據的前后關聯性,導致其只能感知宏觀特征然后進行預測。小波變換重構的實質是抑制數據內部雜亂無序的部分,顯現數據的周期性趨勢性。
在進行小波分解操作時,不同的小波函數會導致不同的分解效果,繼而影響后續的預測,選定合適有效的小波變換可以有效地展現數據特征。通過小波分解,得到了低頻部分與高頻部分,其中低頻部分反映了數據的宏觀全局特征,也就是交通流量數據的總體演化趨勢,高頻部分即是噪聲,反映了交通流量數據的各種隨機因素帶來的干擾,如危險天氣等。其重構變換表達式如式(1)所示。
其中:a是尺度因子;b是平移因子;φ是小波函數;f(t)為輸入信號;W(a,b)是小波變換系數。閾值處理是小波去噪的關鍵部分,通過選擇合適的閾值處理,降低噪聲因素對數據分析的影響[23],在顯現數據的周期性趨勢性的同時保留部分噪聲特征,從而便于深度學習模型感知流量數據。參考相關研究[24],綜合考慮使用sym4小波。小波分解層數為3層,并采用軟閾值方法進行閾值處理。考慮使用信噪比作為小波函數分解效果評價依據。信噪比是衡量信號質量的指標,一般認為大于20 dB是很好的信噪比;0~20 dB在可以辨認的信號的信噪比,小于0 dB是較難辨認信號的信噪比。信噪比計算為
HSNR=10×lg(PSPN)(2)
其中:PS為信號的功率;PN為噪聲的功率。
利用小波分解與重構,將原始時間序列數據分解,能夠更好地把握數據信息的細節,提高預測精度,提供更準確的預測信息。
1.3 Autoformer模型預測數據
Autoformer模型主要面向時間序列預測任務,通過時序分解單元與自相關單元實現了更優的時間序列預測效果。
Autoformer是一個編碼器-解碼器架構的模型,序列分解與自相關機制嵌入至編碼器與解碼器中。結合自相關機制與序列分解的控制,經過減弱局部無序性的交通數據被分解為流量趨勢性部分和流量周期性部分,其計算公式為
Xt=AvgPool(padding(X))Xs=X-Xt(3)
其中:X是長度為L的序列,X∈RL×d;Xt為序列的短期波動;Xs為減去短期波動留下的周期性平滑序列。
自相關機制部分聚合了相似的子序列同時在自相關機制部分計算得到了序列的自相關系數R(τ),其反映了基于周期的依賴關系。R(τ)計算公式為
R(τ)=limL→∞1L∑Lt=1XtXt-τ(4)
其中:R(τ)表示Xt與Xt-τ之間的相似性;L表示進行了L次延遲操作。為了提高計算效率,Autoformer中使用了快速傅里葉變換計算R(τ),見式(5)。
S(f)=F(Xt)F*(Xt)R(τ)=F-1(Sxx(f))(5)
其中:S(f)是從時序轉換過來的頻域;F表示傅里葉變換;F*表示共軛操作;f代表頻率;F-1代表傅里葉逆變換。
Autoformer的漸進式分解單元與自相關機制單元可以有效地挖掘交通流量數據內在的關系。1.2節的小波重構部分有助于Autoformer挖掘交通流量數據特征,加強了模型對流量數據隱藏特征的感知。
1.4 融合空域無人機飽和流量計算
首先引入道路設計飽和流量的概念。設計飽和流量指先期交通設計階段考慮交通需求、交通安全等因素得到的最大通行能力[25]。根據文獻[26,27]有以下一般設計飽和流量計算為
Sf=Sbi×f(Fi)(6)
其中:Sf為進口車道設計飽和流量,單位pcu/h;Sbi為第i條進口道基本飽和流量,單位pcu/h;f(Fi)為各類進口車道各類校正系數。根據資料,空中交通容量的基本定義歸納見式(7)[28]。
C=VS(7)
其中:C為區域容量,單位架次;V為區域航空器的平均速度,單位km/h;S為最小縱向間隔,單位km。本文暫且僅考慮前后機速度相同的運行情況。式(7)兩端變換得式(8)。
C=V·TS·T(8)
其中:右側分子為單位時間的飛行距離;V·T/S部分為單位時間服務架次。因此,C可以看做單位時間飽和流量,在這里空中基本交通流量定義見式(9)。
Cb=nt(9)
其中:Cb為流量;n為單位時間架次;t為單位時間。
融合空域內飛行情況復雜,且需要保證有人機運行安全。為規范融合空域內的無人機運行,結合上述兩類理論,本文提出了一種融合空域無人機飽和流量計算方法,見式(10)。
Qf=C×(1-CbC)× f (Fi)(10)
其中:Qf為無人機飽和流量;Cb為有人機融合空域流量;f(Fi)為流量校正系數。當Cb為0時意味著融合空域轉變為隔離空域。
因無人機性能以及其無人運行特點,各方面運行標準相對有人機都會有不同程度的調整,且以有人機運行安全優先。本文提出三個基本校正系數計算無人機飽和流量。
a)fb無人機基本流量校正系數:fb=Vh/Vu。Vh為有人機速度,Vu為無人機速度。根據交通流三要素的基本關系可知,速度越慢,可行最小間隔越小,單位時間流量越大。
b)ft無人機機型校正系數:ft∈[0.5,1],一般旋翼類無人機ft取值在[0.75,1],固定翼類無人機取值在[0.5,0.75]。根據無人機飛行狀態易變性決定,旋翼類無人機懸停特性使得它相比固定翼類無人機更能及時應對突發事件。
c)fz無人機區域校正系數:fz∈[0.5,1]。無鄰近進近離場航線,無鄰近障礙物限制面時fz取值為1;扇區內存在有人機進近離場航線時fz取值[0.8,1);鄰近障礙物限制面時fz取值[0.5,0.8)。根據實際飛行安全要求決定,無人機越鄰近有人機運行,校正系數越低。
1.5 評價指標
為評估預測結果的精確程度,實例結果使用平均絕對誤差(MAE)與均方誤差(MSE)作為評價依據,見式(11)(12)。
PMAE=1N∑Ni=1|yi-i|(11)
PMSE=1N∑Ni=1(yi-i)2(12)
2 實例計算
2.1 實驗環境
受限于各類無人機本身的性能,一般無人機的飛行高度小于3 000 m。當無人機自由飛行時,有人機在進近和離場程序時會受到無人機的影響。為了滿足有人機運行的基本安全要求,本文中融合空域內無人機運行環境設置為:a)無人機起降通航機場處于終端區邊緣扇區;b)無人機飛行高度完全低于扇區內有人機飛行高度;c)鄰近扇區存在進離場程序。
以“運-5”系列為基礎的改進型無人機是目前常見的市場化無人機。順豐控股作為中國物流龍頭,其大載貨量無人機——順豐FH-98,是基于“運5-B”改進的。因此,本文實驗的無人機基準機型參數參考“運5-B”設置。無人機相關基準參數如表1所示。
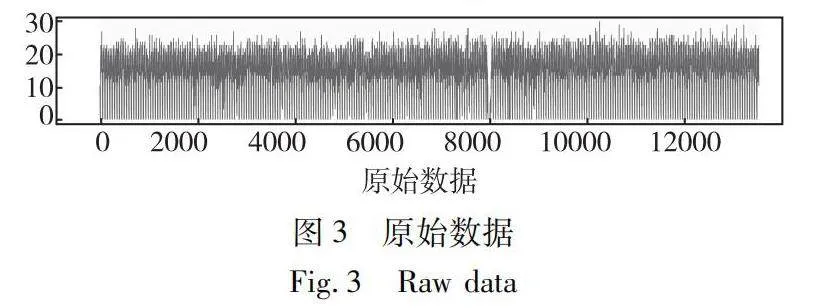
為了驗證模型可行性,實例數據集選取西南某扇區進離場2019年3月1日00:00~12月1日24:00運行數據作為實驗數據,時間間隔為30 min,已知單位時間間隔區域容量30,數據集僅保留流量屬性。預測模型訓練集、驗證集、測試集比例為7∶1∶2。實驗平臺為Windows 11,CPU為i7-12700H,GPU為RTX3070Ti Laptop,內存16 GB。模型基于Python 3.8,PyTorch 1.13與CUDA 11.6實現。原始數據如圖3所示。
交通流量數據雖然具有宏觀上的規律性,然而微觀上存在明顯的無序性。基礎Autoformer模型本身對數據并無特殊要求,然而數據本身的微觀無序性仍然會對預測結果產生一定的影響。因此,實驗仍然需要檢驗原始數據的初始特征。
Hurst指數是一種用于分析時間序列數據長期依賴性的指標,它可以反映數據的持久性或反轉性。Hurst指數通常介于0~1,值為0.5時,表示時間序列呈現完全隨機的行為;值大于0.5時,表示時間序列具有持續的趨勢;值小于0.5時,表示時間序列具有反轉的趨勢,即在未來表現與現在相反的趨勢。本文將運用Hurst指數[29]來評估交通流量數據的時間依賴性。
E(τ)=max(Xi)-min(Xi)S(τ)=1N-1∑Ni=1(Xi-X-)2E(τ)S(τ)=cτHXi(τ)=∑τj=1|bj-A(τ)|(13)
其中,E(τ)極差表示在一段時間內數據的變化幅度;S(τ)標準差表示一段時間內數據的波動性;c為常數;Xi(τ)為是第i個子序列的累計離差;bj表示第j個數據點;A(τ)表示第τ個區間的均值。
通過計算得到Hurst指數為0.531 1,這表明交通流量數據的未來變化和過去變化有微弱的關聯,交通流量數據有可能保持現有的趨勢,也有可能發生反轉或隨機波動,同時說明數據內部噪聲影響了數據特征的展現。
2.2 小波重構
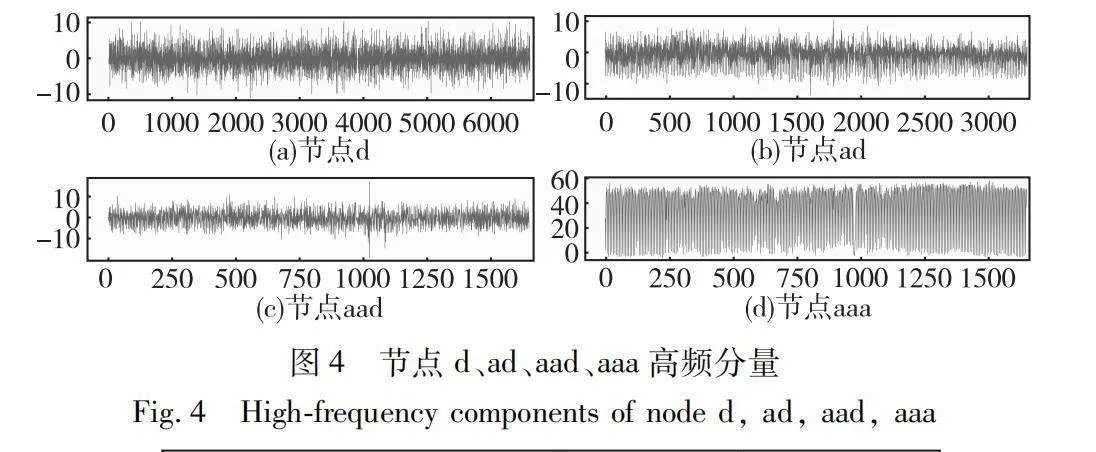
閾值為0.1原始數據的小波分解低頻高頻分量結果如圖4所示。其中:節點aaa是第三層分解的低頻分量;aad是第三層分解的高頻分量;ad是第二層分解的高頻分量;d是第一層分解的高頻分量。小波重構如圖5所示。經式(2)計算,信噪比為22.897 4,重構效果良好。
2.3 無人機飽和流量預測
實驗以2.1節的內容作為實驗環境并保守取值,因此各參數取值如式(14)所示。
fb=2ft=0.75fz=0.8(14)
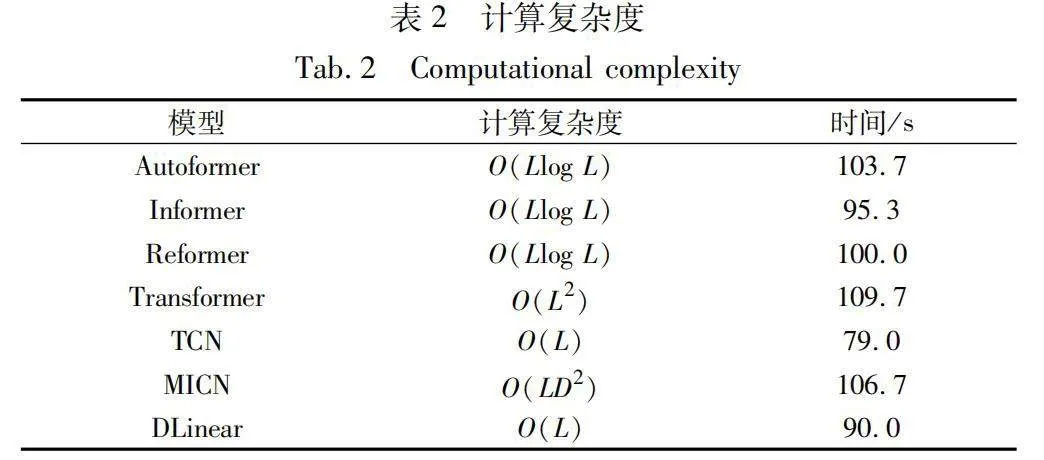
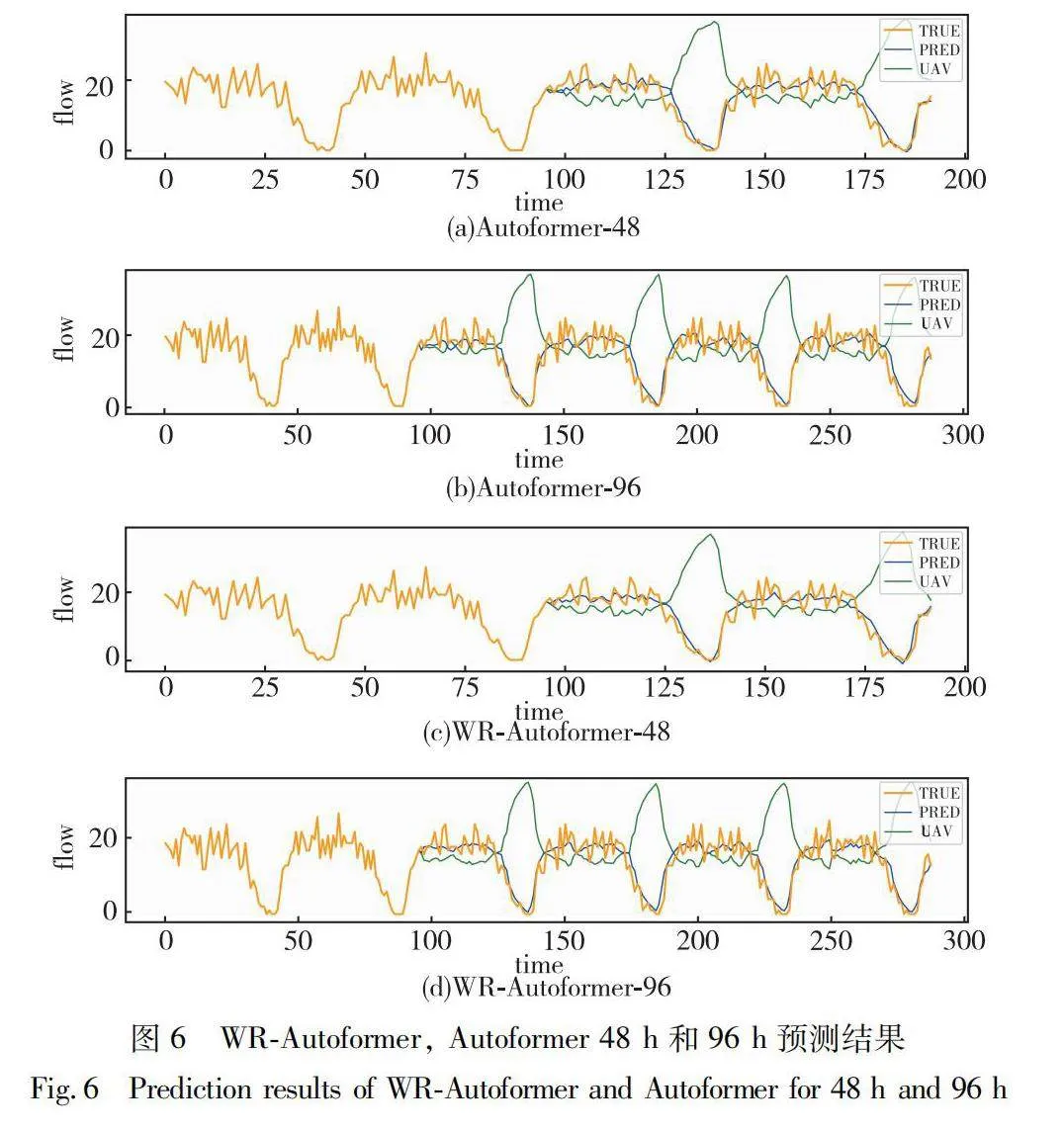
將重構數據交由Autoformer模型預測。模型訓練采用L2損失函數,使用了初始學習率10-4的Adam優化器。批大小為32,epoch為3,數據步長為30 min,輸入長度固定96,預測長度為96和192。實驗結果如圖6所示。計算復雜度如表2所示。
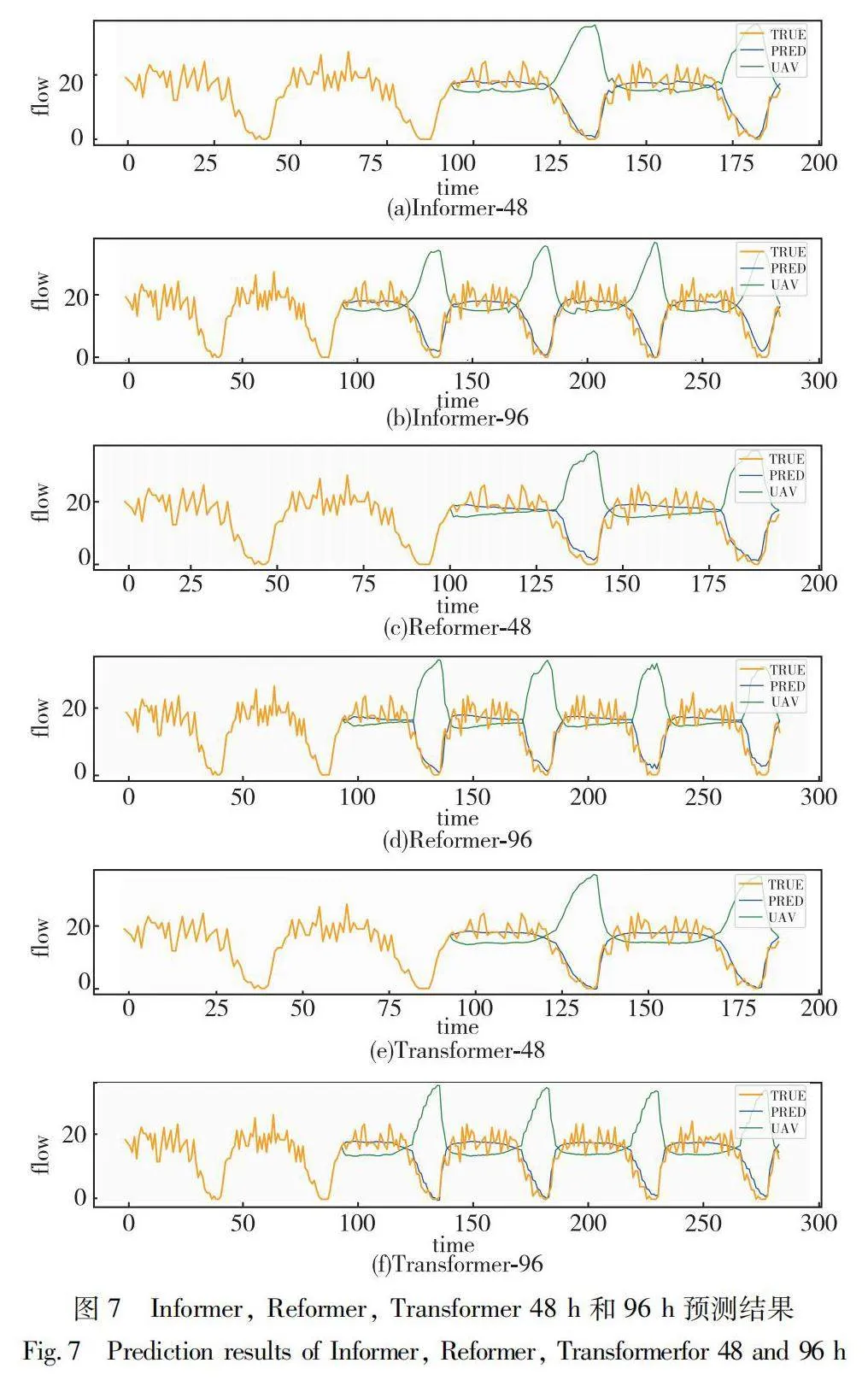
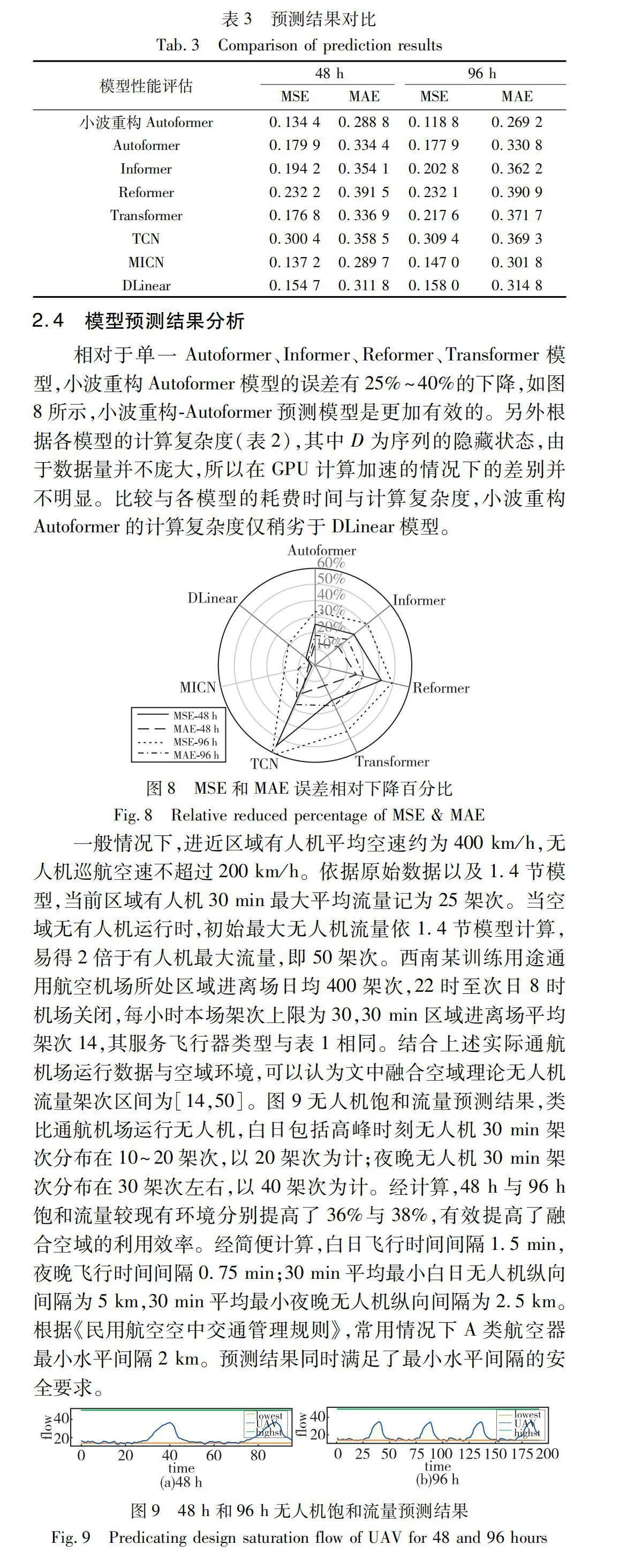
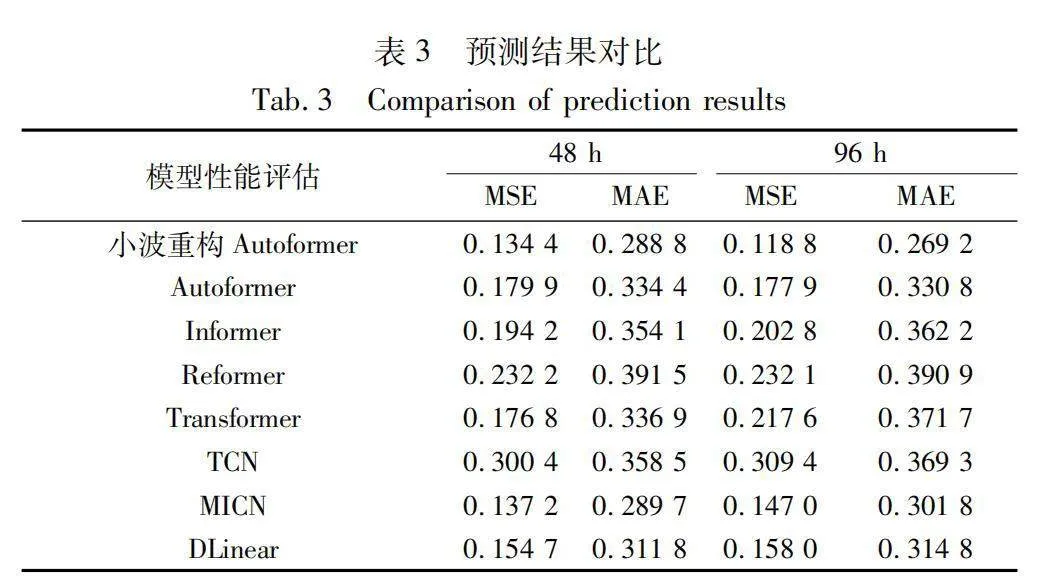
圖6展示了原始數據、原始預測數據以及無人機預測數據。整體上,模型較為明顯地預測了流量增減態勢,預測數據的高峰時段態勢符合原始數據波動態勢,預測結果與原始數據具有較高的關聯性。實驗同時采用Transformer及其衍生改良模型Reformer和Informer的預測結果作為對照。實驗結果如圖7所示。同時對照TCN、MICN、DLinear模型,效果評估如表3所示。
2.4 模型預測結果分析
相對于單一Autoformer、Informer、Reformer、Transformer模型,小波重構Autoformer模型的誤差有25%~40%的下降,如圖8所示,小波重構-Autoformer預測模型是更加有效的。另外根據各模型的計算復雜度(表2),其中D為序列的隱藏狀態,由于數據量并不龐大,所以在GPU計算加速的情況下的差別并不明顯。比較與各模型的耗費時間與計算復雜度,小波重構Autoformer的計算復雜度僅稍劣于DLinear模型。
一般情況下,進近區域有人機平均空速約為400 km/h,無人機巡航空速不超過200 km/h。依據原始數據以及1.4節模型,當前區域有人機30 min最大平均流量記為25架次。當空域無有人機運行時,初始最大無人機流量依1.4節模型計算,易得2倍于有人機最大流量,即50架次。西南某訓練用途通用航空機場所處區域進離場日均400架次,22時至次日8時機場關閉,每小時本場架次上限為30,30 min區域進離場平均架次14,其服務飛行器類型與表1相同。結合上述實際通航機場運行數據與空域環境,可以認為文中融合空域理論無人機流量架次區間為[14,50]。圖9無人機飽和流量預測結果,類比通航機場運行無人機,白日包括高峰時刻無人機30 min架次分布在10~20架次,以20架次為計;夜晚無人機30 min架次分布在30架次左右,以40架次為計。經計算,48 h與96 h飽和流量較現有環境分別提高了36%與38%,有效提高了融合空域的利用效率。經簡便計算,白日飛行時間間隔1.5 min,夜晚飛行時間間隔0.75 min;30 min平均最小白日無人機縱向間隔為5 km,30 min平均最小夜晚無人機縱向間隔為2.5 km。根據《民用航空空中交通管理規則》,常用情況下A類航空器最小水平間隔2 km。預測結果同時滿足了最小水平間隔的安全要求。
3 結束語
本文提出了一種新穎的基于小波重構-Autoformer融合空域無人機飽和流量預測方法,并設置了相關實驗環境進行驗證。根據實驗結果,小波重構可以有效地降低交通流量數據內部噪聲對預測的影響,證明了交通流量預測工作中降低交通流量數據內部噪聲的必要性,并依靠Autoformer模型其獨特的漸進式分解與自相關機制獲得了更精準的輸出,最終實現了融合空域無人機飽和流量的精確預測。實驗環境內無人機飽和流量得到了大幅提升,提高了實驗空域的利用率。實驗結果表明,相比Transformer模型等其他模型,小波重構-Autoformer融合空域飽和流量預測方法預測效果更理想,預測結果更貼近實際情況,可以為空中管理部門的融合空域規劃工作提供一定程度的參考。本文方法仍存在進一步改進空間,下一步研究將優化飽和流量計算方法,并延長預測長度,進一步提高預測效果。
參考文獻:
[1]Kopardeka P. Unmanned aerial system (UAS) traffic management (UTM): enabling low-altitude airspace and UAS operations, 20140013436 [R]. California: National Aeronautics and Space Administration, 2014.
[2]Thipphavong D P, Apaza R, Barmore B, et al.Urban air mobility airspace integration concepts and considerations [C]// Proc of Aviation Technology, Integration, and Operations Conference. Atlanta: AIAA Press, 2018: 3676.
[3]廖小罕, 屈文秋, 徐晨晨, 等. 城市空中交通及其新型基礎設施低空公共航路研究綜述 [J]. 航空學報, 2023, 44 (24): 6-34. (Liao Xiaohan, Qu Wenqiu, Xu Chenchen, et al.A review of urban air mobility and its new infrastructure low-altitude public routes [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (24): 6-34.)
[4]全權, 李剛, 柏藝琴, 等. 低空無人機交通管理概覽與建議 [J]. 航空學報, 2020, 41 (1): 6-34. (Quan Quan, Li Gang, Bai Yiqin, et al.Low altitude UAV traffic management: an introductory overview and proposal [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 6-34.)
[5]Min Xinyu, Hu Jianming, Zhang Zuo. Urban traffic network modeling and short-term traffic flow forecasting based on GSTARIMA model [C]// Proc of the 13th International IEEE Conference on Intelligent Transportation Systems. Piscataway, NJ: IEEE Press, 2010: 1535-1540.
[6]Feng Xinxin, Ling Xianyao, Zheng Haifeng, et al.Adaptive multi-kernel SVM with spatial-temporal correlation for short-term traffic flow prediction [J]. IEEE Trans on Intelligent Transportation Systems, 2018, 20 (6): 2001-2013.
[7]Polson N G, Sokolov V O. Deep learning for short-term traffic flow prediction [J]. Transportation Research Part C: Emerging Technologies, 2017, 79: 1-17.
[8]Fu Rui, Zhang Zuo, Li Li. Using LSTM and GRU neural network methods for traffic flow prediction [C]//Proc of the 31st Youth Academic Annual Conference of Chinese Association of Automation. Piscataway, NJ: IEEE Press, 2016: 324-328.
[9]Yan Zhen, Yang Hongyu, Guo Dongyue, et al.Improving airport arrival flow prediction considering heterogeneous and dynamic network dependencies [J]. Information Fusion, 2023, 100: 101924.
[10]Liu Yang, SongYaolun, Zhang Yan, et al.WT-2DCNN: a convolutional neural network traffic flow prediction model based on wavelet reconstruction [J]. Physica A: Statistical Mechanics and its App-lications, 2022, 603: 127817.
[11]Gao Heyao, Jia Hongfei, Yang Lili. An improved CEEMDAN-FE-TCN model for highway traffic flow prediction [J]. Journal of Advanced Transportation, 2022, 2022:article ID 2265000.
[12]Wang Huiqiang, Peng Jian, Huang Feihu, et al.MICN: multi-scale local and global context modeling for long-term series forecasting [C]// Proc of the 11th International Conference on Learning Representations. [S.l.] : OpenReview.net, 2022.
[13]Zeng Ailing, ChenMuxi, Zhang Lei, et al.Are transformers effective for time series forecasting? [C]// Proc of the 37th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2023: 11121-11128.
[14]Vaswani A,Shazeer N, Parmar N, et al.Attention is all you need[C]// Proc of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017:6000-6010.
[15]Kitaev N, Kaiser ?, Levskaya A. Reformer: the efficient Transformer [EB/OL]. (2020-01-13) . https://arxiv. org/abs/2001. 04451.
[16]Zhou Haoyi, Zhang Shanghang, Peng Jieqi, et al.Informer: beyond efficient transformer for long sequence time-series forecasting [C]// Proc of AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2021: 11106-11115.
[17]周楚昊, 林培群. 基于多通道Transformer的交通量預測方法 [J]. 計算機應用研究, 2023, 40 (2): 435-439. (Zhou Chuhao, Lin Peiqun. Traffic flow prediction method based on multi-channel Transformer [J]. Application Research of Computers, 2023, 40 (2): 435-439.)
[18]付恩, 張益農, 楊帆, 等. 基于頻率分解Transformer的時間序列長時預測模型 [J]. 制造業自動化, 2022, 44 (11): 177-181. (Fu En, Zhang Yinong, Yang Fan, et al.Frequency decomposition transformer based model for long term time series prediction[J]. Manufacturing Automation,2022, 44 (11): 177-181.)
[19]Liu Miaonan, Wang Wei, Hu Xianhui, et al.Multivariate long-time series traffic passenger flow prediction using causal convolutional sparse self-attention MTS-Informer [J]. Neural Computing and Applications, 2023, 35 (34): 24207-24223.
[20]Wu Haixu, Xu Jiehui, Wang Jianmin, et al.Autoformer: decomposition transformers with auto-correlation for long-term series forecasting [J]. Advances in Neural Information Processing Systems, 2021, 34: 22419-22430.
[21]Feng Huifang, Zhang Xianghong. A novel encoder-decoder model based on Autoformer for air quality index prediction [J]. PLoS One, 2023, 18 (4): e0284293.
[22]Wang Ziqian, Chen Zhihao, Yang Yang, et al.A hybrid Autoformer framework for electricity demand forecasting [J]. Energy Reports, 2023, 9: 3800-3812.
[23]王棲溪, 牛俊, 方涵先, 等. 基于小波分解與重構方法研究電離層偶發E層 [J]. 空間科學學報, 2022, 42 (2): 240-245. (Wang Xixi, Niu Jun, Fang Hanxian, et al.A new ionosphere sporadic E research method based on wavelet decomposition and reconstruction [J]. Chinese Journal of Space Science, 2022, 42 (2): 240-245.)
[24]鐘建軍, 宋健, 由長喜, 等. 基于信噪比評價的閾值優選小波去噪法 [J]. 清華大學學報: 自然科學版, 2014, 54 (2): 259-263. (Zhong Jianjun, Song Jian, You Changxi, et al.Wavelet de-noising method with threshold selection rules based on SNR evaluations [J]. Journal of Tsinghua University: Science and Technology, 2014, 54 (2): 259-263.)
[25]吳兵, 李曄. 交通管理與控制 [M]. 5版. 北京: 人民交通出版社, 2015: 178-185. (Wu Bing, Li Ye. Traffic management and control [M].5th ed. Beijing: China Communication Press, 2015: 178-185.)
[26]Elefteriadou L. The highway capacity manual 6th edition: a guide for multimodal mobility analysis [M]. Washington DC : Institute of Transportation Engineers, 2016.
[27]Gao Xing, Zhao Jing, Wang Meng. Modelling the saturation flow rate for continuous flow intersections based on field collected data [J]. PLoS One, 2020, 15 (8): e0236922.
[28]胡明華. 空中交通流量管理理論與方法 [M]. 北京: 科學出版社, 2010: 45-55. (Hu Minghua. Theory and methods of air traffic flow management[M]. Beijing: China Science Publishing, 2010: 45-55.)
[29]王飛, 韓翔宇. 基于分形插值的空中交通流量短期預測 [J]. 航空學報, 2022, 43 (9): 513-520. (Wang Fei, Han Xiangyu. Short-term prediction of air traffic flow based on fractal interpolation [J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (9): 513-520.)
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26