架空輸電線路激光雷達(dá)點(diǎn)云數(shù)據(jù)處理技術(shù)研究
2025-01-10 00:00:00李杰孔令凱
物聯(lián)網(wǎng)技術(shù) 2025年1期
摘 要:為了構(gòu)建輸電線路走廊、導(dǎo)地線與桿塔本體的高精度三維模型,采用激光雷達(dá)點(diǎn)云數(shù)據(jù)處理技術(shù),對不同桿塔重要巡檢對象的自動精準(zhǔn)定位方法進(jìn)行研究,提出了一種直接從點(diǎn)云數(shù)據(jù)中自動提取桿塔并精確定位其位置的方法。該方法能夠獲取包括塔身、塔頭等關(guān)鍵部位的位置信息。將提取的桿塔位置、絕緣子位置、掛點(diǎn)位置等信息進(jìn)行展示、分析以及精度定位評估。結(jié)果表明,所提方法的效果很好、完成度高,能夠真實(shí)地展現(xiàn)輸電線路的走廊環(huán)境、桿塔架構(gòu)、導(dǎo)地線布局以及絕緣子串等部件的信息。
關(guān)鍵詞:輸電線路走廊;激光雷達(dá);點(diǎn)云數(shù)據(jù);三維模型;數(shù)據(jù)提取;特征分析
中圖分類號:TP39;TM75 文獻(xiàn)標(biāo)識碼:A 文章編號:2095-1302(2025)01-0-04
0 引 言
為了實(shí)現(xiàn)輸電線路無人機(jī)全自主巡檢,減少手動飛行控制操作,本文構(gòu)建了輸電線路的高精度三維模型,并對不同類型桿塔的巡檢對象進(jìn)行精準(zhǔn)定位,為后期無人機(jī)自主巡檢的航跡規(guī)劃工作奠定了基礎(chǔ),同時(shí)還提高了輸電線路巡檢效率,降低了巡檢成本,做到線路精細(xì)化巡檢。此方法能夠有效保證無人機(jī)的飛行安全,降低電網(wǎng)潛在風(fēng)險(xiǎn),提高輸電線路巡檢效率和運(yùn)行可靠性,為后續(xù)輸電線路巡檢探索提供新的發(fā)展方向。本研究也間接提高了輸電線路運(yùn)營的可靠性,減少了維修巡檢的人工成本,規(guī)范了輸電線路網(wǎng)的管理[1-2]。
在研究過程中,充分考慮了設(shè)備輕量化、數(shù)據(jù)成果即時(shí)化、系統(tǒng)操作簡單化等因素,利用無人機(jī)激光Lidar技術(shù),對輸電線路走廊高精度三維模型的構(gòu)建方法進(jìn)行了研究。構(gòu)建了紋理精細(xì)度高、空間坐標(biāo)準(zhǔn)確的三維高精度模型,該模型能夠全面反映桿塔本體模型空間結(jié)構(gòu)的信息。依托該模型,可以對重點(diǎn)巡檢對象(絕緣子、掛點(diǎn)等)進(jìn)行分類提取與識別,并結(jié)合輸電線路三維模型的空間參考坐標(biāo)信息,實(shí)現(xiàn)對重要巡檢對象精準(zhǔn)坐標(biāo)的提取。
1 原理分析
激光雷達(dá)測量技術(shù)主要包含激光掃描裝置、全球?qū)Ш叫l(wèi)星系統(tǒng)、慣性導(dǎo)航系統(tǒng)以及電腦處理單元等四個關(guān)鍵方面。飛行平臺可采用旋翼無人機(jī)或固定翼飛機(jī),激光掃描裝置主要有相位測距掃描和脈沖測距掃描儀兩種。定位和慣性測量模塊主要由GNSS接收機(jī)和IMU慣性導(dǎo)航單元構(gòu)成。同時(shí)為提高測量精度與增加模型色彩,還需要在機(jī)載激光雷達(dá)系統(tǒng)內(nèi)配置高精度的數(shù)碼量測相機(jī)[3-5]。
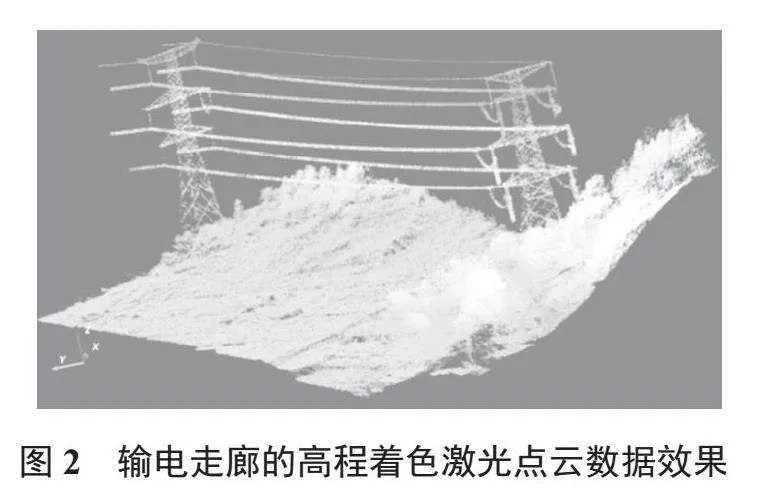
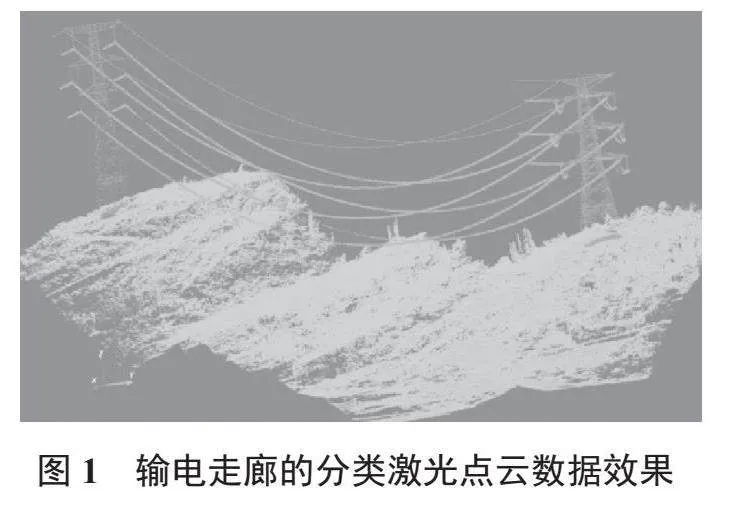
三維激光掃描儀及數(shù)碼相機(jī)采用固定的頻率對航行區(qū)域進(jìn)行攝像,激光掃描儀向地面輸出激光脈沖,然后根據(jù)激光脈沖從輸出到接收所需要的時(shí)間來計(jì)算掃描設(shè)備到地面光斑之間的距離,利用實(shí)時(shí)動態(tài)載波相位差分技術(shù)(Real-Time Kinematic, RTK)來獲取掃描裝置的三維坐標(biāo)[6-8];通過高精度慣性測量儀,便能夠分析出激光掃描儀攝像過程中的位置信息(航偏角、傾斜角及旁向傾角),從而建立起空間幾何與參數(shù)間的關(guān)系,最終確定地表地物激光位置點(diǎn)的三維坐標(biāo)(x, y, z)。輸電走廊的分類激光點(diǎn)云數(shù)據(jù)效果以及高程著色激光點(diǎn)云數(shù)據(jù)效果分別如圖1和圖2所示。
激光三維數(shù)據(jù)憑借其厘米級別的精度,能夠準(zhǔn)確定位桿塔、絕緣子串等部件的空間位置,從而獲取準(zhǔn)確的空間坐標(biāo)信息。這些信息為無人機(jī)自主巡檢的航跡規(guī)劃、目標(biāo)識別與定位提供了堅(jiān)實(shí)的數(shù)據(jù)基礎(chǔ)。另外,激光三維數(shù)據(jù)模型中蘊(yùn)含的導(dǎo)線走向、導(dǎo)線弧垂等信息,為無人機(jī)的沿線飛行、導(dǎo)線數(shù)據(jù)采集任務(wù)提供了精確的數(shù)據(jù)參考。
針對輸電線路中不同桿塔的重要巡檢對象,計(jì)劃在高精度三維模型構(gòu)建的基礎(chǔ)上,進(jìn)一步探索自動精準(zhǔn)定位的方法。具體的研究步驟如下:
(1)利用輸電線路走廊點(diǎn)云的空間分布特征,提出一種直接從點(diǎn)云數(shù)據(jù)自動提取桿塔,并精確定位桿塔位置的方法。該方法能夠精確獲取包括塔身、塔頭等關(guān)鍵部位的位置信息。
(2)結(jié)合輸電線路桿塔、絕緣子、導(dǎo)線相對關(guān)系及特征信息,基于KD樹子鄰域,結(jié)合半徑搜索算法,自動提取絕緣子、掛點(diǎn)位置信息。
(3)對提取的桿塔位置、絕緣子位置、掛點(diǎn)位置等信息進(jìn)行成果展示、分析以及精度定位評估。
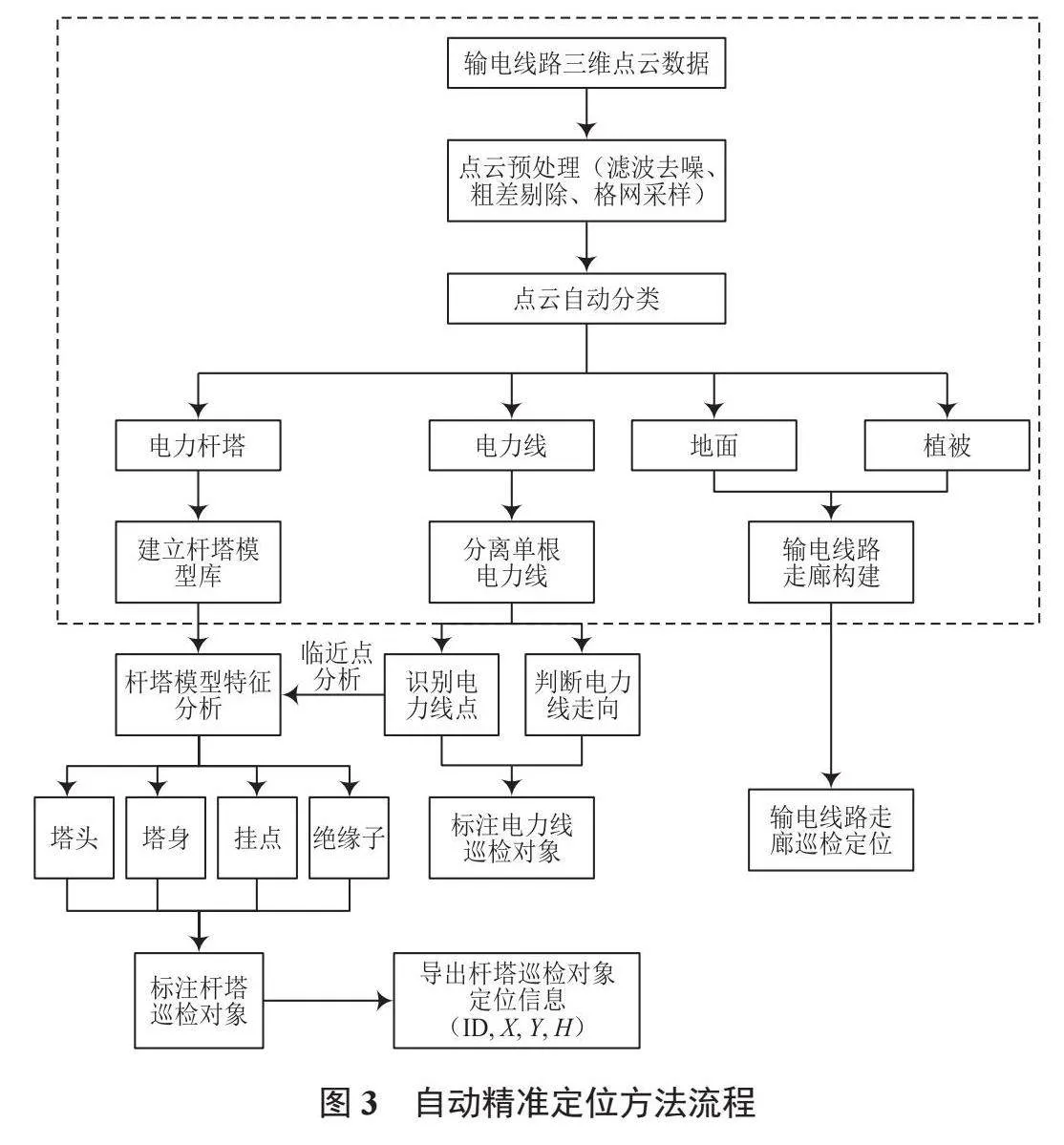
針對不同桿塔巡檢對象的自動精準(zhǔn)定位方法的流程如圖3所示。其中虛線區(qū)域已經(jīng)在輸電線路高精度三維模型構(gòu)建方法中實(shí)現(xiàn),當(dāng)無人機(jī)采集輸電線路三維點(diǎn)云數(shù)據(jù)后,首先采用濾波去噪、粗差剔除、格網(wǎng)采樣技術(shù),對這些點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理,實(shí)現(xiàn)點(diǎn)云的自動分類,將其分為桿塔、導(dǎo)地線、地面和植被四大類[9-10]。其中,利用采集的桿塔數(shù)據(jù)建立桿塔模型庫,利用采集的導(dǎo)地線數(shù)據(jù)分離單根導(dǎo)地線,利用采集的地面和植被數(shù)據(jù)構(gòu)建輸電線路走廊信息。結(jié)合導(dǎo)地線臨近點(diǎn),通過對桿塔模型進(jìn)行特征分析,可以得出塔頭、塔身、掛點(diǎn)和絕緣子信息模型,最終完成無人機(jī)巡檢架空輸電線路走廊激光點(diǎn)云數(shù)據(jù)的檢測。
2 三維點(diǎn)云信息分類
對輸電走廊地物進(jìn)行詳細(xì)的分類和標(biāo)注,主要分出地面、樹木、房屋、桿塔、導(dǎo)地線等,為線路的三維測量和安全性評估提供數(shù)據(jù)支撐。自動分類算法可以解決電力走廊在復(fù)雜地形地貌條件下的三維激光點(diǎn)云分類問題,同時(shí)使用平面拓展算法分離出點(diǎn)云內(nèi)部的公共平面,就可以完成點(diǎn)云的初步空間分割。然后獲得各個分割區(qū)域的點(diǎn)云,實(shí)現(xiàn)主成分解析,并且開展特征值分析,從而獲得這個分割區(qū)域的維度類型。最后形成一個多尺度分類器,通過比較可以得到合理的尺度方案,從而完成各種類型點(diǎn)云信息的智能化識別。分類器是一種基于支持向量機(jī)技術(shù)的線性分類器,通過子空間投影實(shí)現(xiàn)點(diǎn)云信息的迭代識別。設(shè)置分類器的目的是為了實(shí)現(xiàn)點(diǎn)云分類的監(jiān)督,可以合理地開展點(diǎn)云信息的分類。
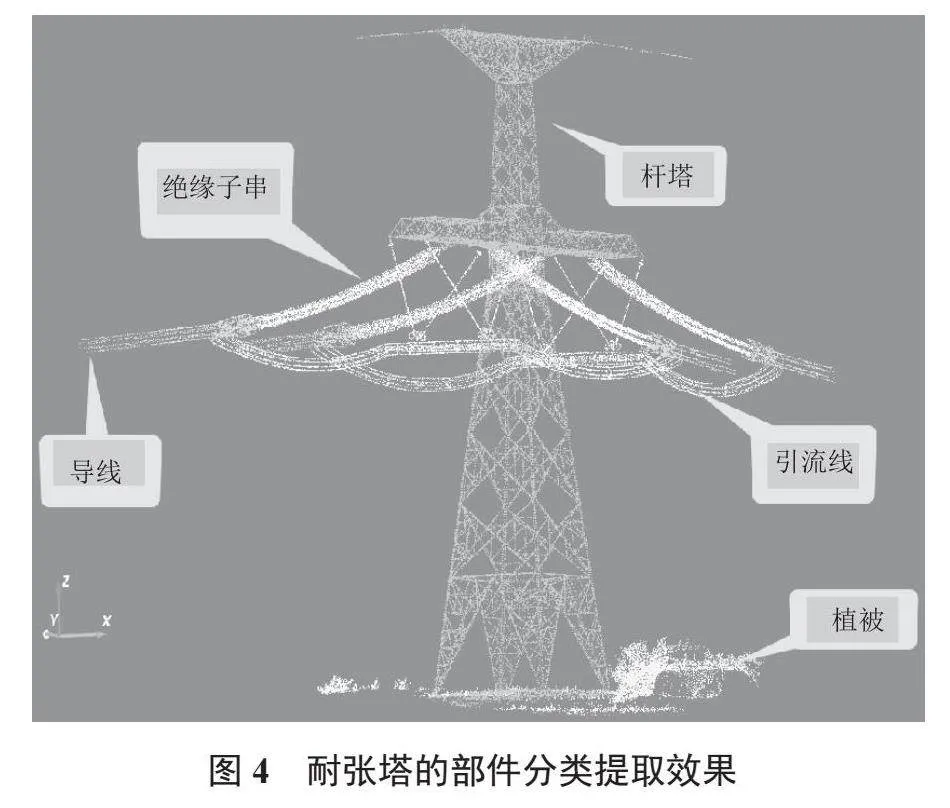
激光點(diǎn)云數(shù)據(jù)經(jīng)過分類后,會獲取輸電線路走廊、道路、植被等多個激光點(diǎn)云分類數(shù)據(jù),可以實(shí)現(xiàn)單類點(diǎn)云數(shù)據(jù)瀏覽,也可以進(jìn)行多類型數(shù)據(jù)疊加瀏覽,方便后期生成DEM、DOM等數(shù)據(jù)以及輸電走廊三維建模。圖4是基于上述方法完成的500 kV耐張塔的部件分類提取效果。
3 輸電線路三維區(qū)域提取
由于輸電線路需要經(jīng)過不同的地形,不同的地形環(huán)境使得輸電線路走廊環(huán)境也非常復(fù)雜。通過無人機(jī)采集輸電線路走廊點(diǎn)云數(shù)據(jù)時(shí),包含了桿塔數(shù)據(jù),同時(shí)還包含地表環(huán)境數(shù)據(jù)、植被數(shù)據(jù)、建筑數(shù)據(jù)等。在采樣過程中,這些數(shù)據(jù)可能會和桿塔數(shù)據(jù)重疊,而架空輸電線路的基本特點(diǎn)為將桿塔通過導(dǎo)地線連在一起。由此可以實(shí)現(xiàn)桿塔的數(shù)據(jù)提取,從而提高點(diǎn)云數(shù)據(jù)處理技術(shù)的準(zhǔn)確性。
輸電線路經(jīng)過的區(qū)域信息在激光雷達(dá)點(diǎn)云數(shù)據(jù)中呈現(xiàn)出高差大、坡度大的特點(diǎn),輸電桿塔信息在點(diǎn)云數(shù)據(jù)中呈現(xiàn)出高密度的特點(diǎn)。因此,對輸電線路信息中關(guān)鍵信息進(jìn)行提取與建模時(shí)可依據(jù)三個方面:高差、坡度與密度;同時(shí)可以借鑒特征圖方法進(jìn)行模型的構(gòu)建。
以激光點(diǎn)云采集的數(shù)據(jù)為基礎(chǔ)形成的特征圖,需要設(shè)置格網(wǎng)尺寸對這些點(diǎn)云數(shù)據(jù)進(jìn)行初步劃分。通過逐步分析這些點(diǎn)云數(shù)據(jù),確立這些點(diǎn)云數(shù)據(jù)在格網(wǎng)中的具體位置,以此來實(shí)現(xiàn)無人機(jī)采集的點(diǎn)云數(shù)據(jù)的規(guī)則格網(wǎng)化。如何設(shè)置格網(wǎng)大小,主要決定因素為字節(jié)的體素濾波器尺寸,需要滿足格網(wǎng)尺寸超過體素濾波器尺寸的條件,這樣才能使得特征圖像連貫,通常設(shè)置格網(wǎng)尺寸為2~4倍的體素濾波器尺寸。這樣,格網(wǎng)化設(shè)置的點(diǎn)云數(shù)據(jù)才能夠較好地對特征圖進(jìn)行分析。依照特征分析的要求,包含五類參數(shù),其中一階特征包含密度、數(shù)字高程模型、數(shù)字表面模型三個方面,二階特征包含高差和坡度兩個方面。
(1)密度參數(shù):作為架空輸電線路定位的基礎(chǔ)條件,采用格網(wǎng)作為統(tǒng)計(jì)單位,分析每個格網(wǎng)中包含的點(diǎn)數(shù),從而實(shí)現(xiàn)桿塔的具體定位,每個格網(wǎng)內(nèi)的點(diǎn)數(shù)就是密度;
(2)數(shù)字高程模型參數(shù):由于架空輸電線路走廊海拔存在一定的差異,為了消除地理因素對桿塔定位造成的影響,通常以格網(wǎng)內(nèi)最低點(diǎn)的高程為基準(zhǔn);
(3)數(shù)字表面模型參數(shù):該參數(shù)顯示走廊的地表信息,可以區(qū)別輸電線路本地和走廊內(nèi)的其他事物,通常以格網(wǎng)內(nèi)最高點(diǎn)的高程為基準(zhǔn);
(4)坡度參數(shù):在進(jìn)行高程分析時(shí),由于輸電線路高度超過10 m,使得部分區(qū)域高程變化非常大,這種情況稱為坡度;
(5)高差參數(shù):在每個格網(wǎng)內(nèi),為了顯示高程分布,通過比較高程參數(shù)和表面參數(shù),從而獲得架空輸電線路走廊內(nèi)的植被、桿塔等信息。
4 重點(diǎn)巡檢對象分類提取
4.1 導(dǎo)線掛點(diǎn)提取建模
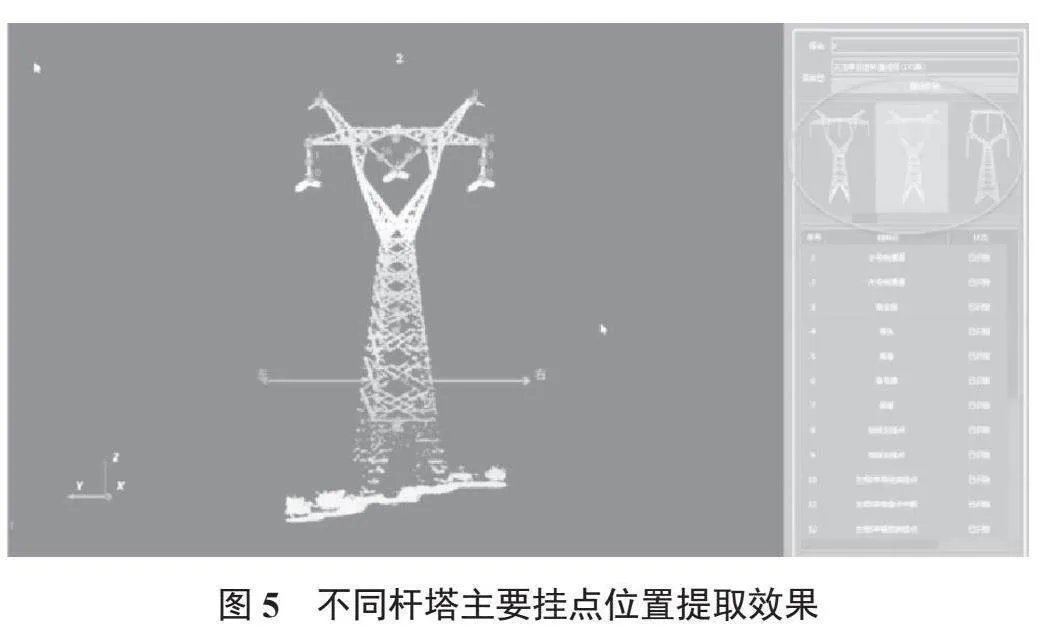
實(shí)現(xiàn)桿塔、架空輸電線路及其附屬設(shè)備等結(jié)構(gòu)的穩(wěn)定提取后,即可利用所得分類提取結(jié)果實(shí)現(xiàn)輸電線路關(guān)鍵懸掛點(diǎn)的三維結(jié)構(gòu)拓?fù)湫畔⒌目煽刻崛 ;谀P蜕L的界面分析技術(shù),通過對架空輸電線路模型的分析,依據(jù)架空輸電線路走向分析點(diǎn)云數(shù)據(jù)。如果采集的點(diǎn)云數(shù)據(jù)截面積超過了系統(tǒng)預(yù)設(shè)值,那么系統(tǒng)將自動重新設(shè)置模型參數(shù),此時(shí)已經(jīng)采集的點(diǎn)云數(shù)據(jù)將被定義為屬于架空輸電線路部分。基于架空輸電線路模型插值的截面跟蹤算法提取懸掛點(diǎn)。桿塔主要掛點(diǎn)的提取效果如圖5所示。
4.2 絕緣子串提取建模
根據(jù)導(dǎo)線、桿塔、絕緣子之間的關(guān)系,能夠知道導(dǎo)地線是通過絕緣子和桿塔進(jìn)行連接的。通過導(dǎo)線、桿塔的點(diǎn)云數(shù)據(jù)提取方法,可以快速實(shí)現(xiàn)在激光點(diǎn)云中進(jìn)行桿塔、導(dǎo)線的提取。在此基礎(chǔ)上,僅需要實(shí)現(xiàn)在單個桿塔中提取出絕緣子串即可。
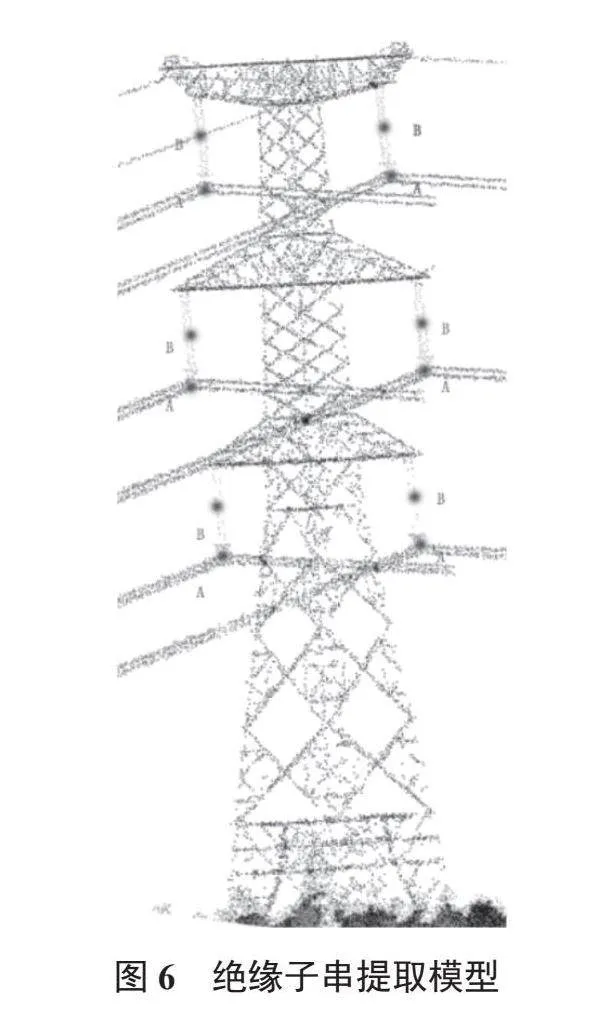
在搭建絕緣子激光點(diǎn)云模型過程中,可以認(rèn)為絕緣子為圓柱形,為了簡單分析,假設(shè)絕緣子串是豎直直線狀且長度為2.4 m,以220 kV架空輸電線路為例,依據(jù)絕緣子最下端的位置信息和絕緣子串模型屬性,便可以建立絕緣子串提取模型,如圖6所示。
4.3 實(shí)例分析
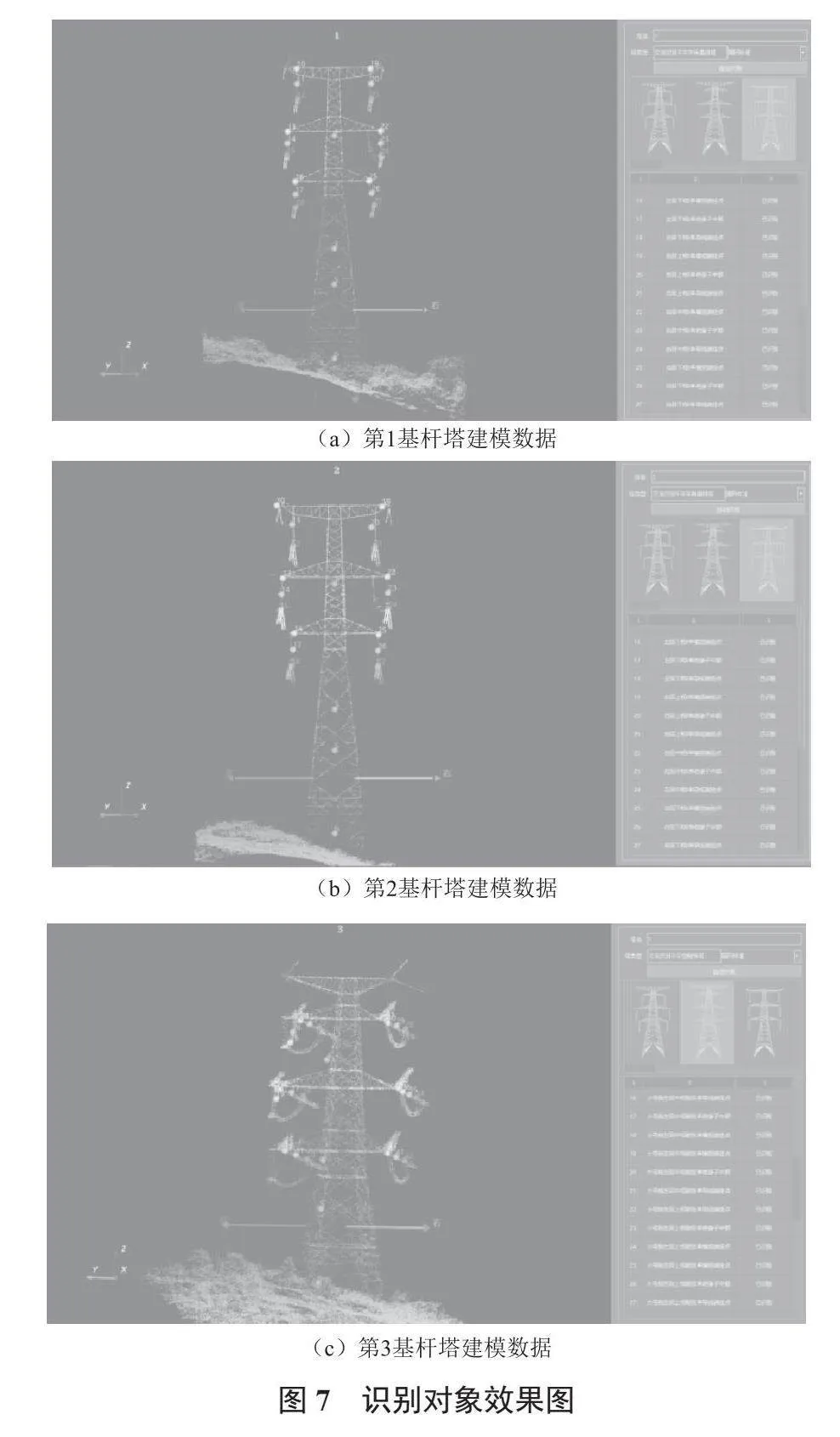
針對不同桿塔模型巡檢對象的自動精準(zhǔn)定位方法,選取不同桿塔類型進(jìn)行實(shí)際測驗(yàn),以500 kV輸電線路雙回路干字型桿塔為例,分析巡檢對象定位精度。通過無人機(jī)機(jī)載激光雷達(dá)設(shè)備對該線路桿塔進(jìn)行數(shù)據(jù)采集,識別巡檢對象的效果如圖7所示。其點(diǎn)云數(shù)據(jù)量為90.1 MB,點(diǎn)云數(shù)量為2 781 368個點(diǎn),點(diǎn)云密度達(dá)到121點(diǎn)/m2,經(jīng)過抽稀后達(dá)到76點(diǎn)/m2,在點(diǎn)云數(shù)據(jù)處理軟件中可以清晰分辨桿塔的詳細(xì)部件,同時(shí)軟件可以流暢運(yùn)行。第1、2基桿塔是500 kV雙回路干字型直線塔,按照無人機(jī)相關(guān)巡檢標(biāo)準(zhǔn),該塔需要巡檢的對象點(diǎn)有27處;第3基桿塔是雙回路干字型耐張塔,按照國家電網(wǎng)無人機(jī)巡檢標(biāo)準(zhǔn),該塔需要巡檢的對象點(diǎn)有45處。
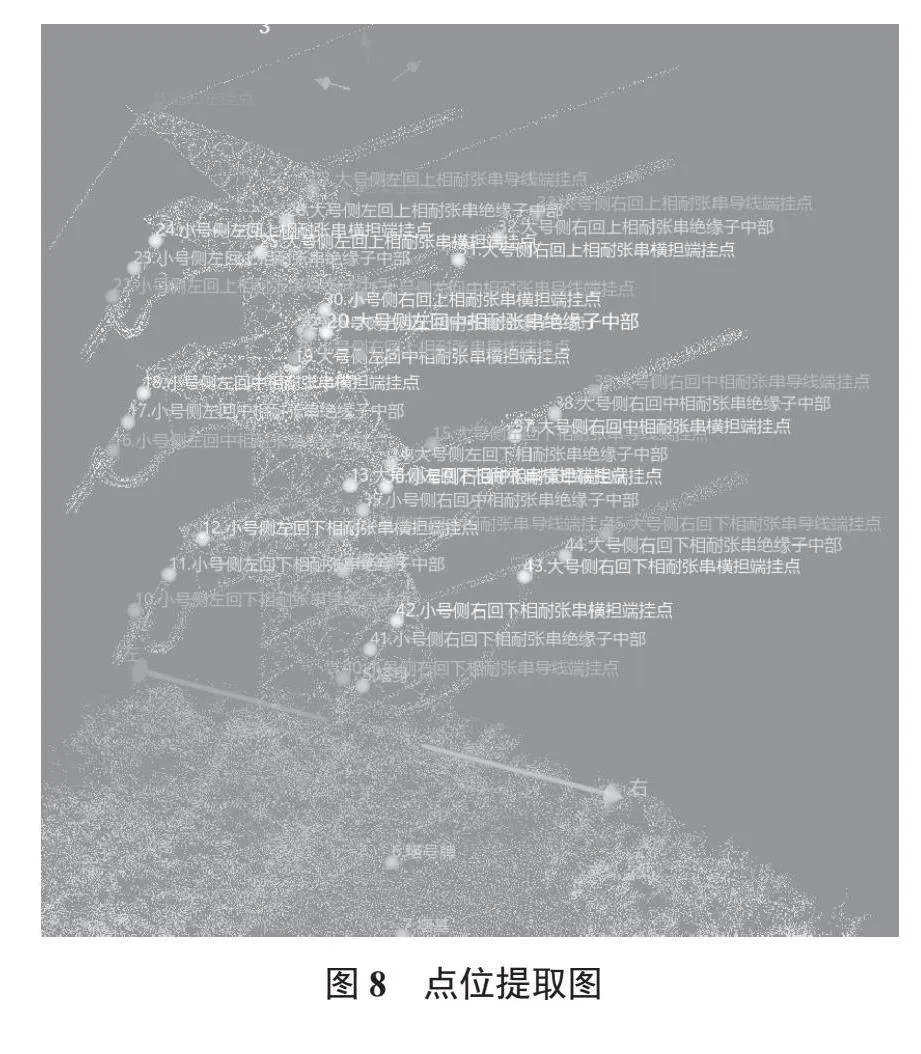
針對輸電線路巡檢對象拍照要求,分為通道、桿塔、架空地線和絕緣子4大類別,并且將每一大類根據(jù)位置信息分為具體的識別對象名稱點(diǎn), 點(diǎn)位提取圖如圖8所示。
通過對比識別定位的巡檢點(diǎn)位和實(shí)際激光雷達(dá)測量巡檢點(diǎn)位發(fā)現(xiàn),分析結(jié)果與實(shí)際測量結(jié)果的最大誤差為0.20 m,最小誤差為0.01 m,其中X方向誤差為0.18 m,Y方向誤差為0.20 m,H方向誤差為0.17 m,滿足無人機(jī)自主巡檢對桿塔主要掛點(diǎn)的拍照定位精度要求。
采用多旋翼無人機(jī)搭載可見光相機(jī)的巡檢方式是線路桿塔精細(xì)化巡檢作業(yè)中的常用手段。該巡檢方式的主要巡檢對象包括:架空桿塔本體、附屬設(shè)施、絕緣子、導(dǎo)線掛點(diǎn)、地線掛點(diǎn)等。通過點(diǎn)云自動分類(桿塔、電力線、地面、植被等)實(shí)現(xiàn)對不同地物的提取,在此基礎(chǔ)上建立不同塔型模型庫并進(jìn)行特征分析,實(shí)現(xiàn)塔頭、塔身、懸掛點(diǎn)、絕緣子等類別的提取。同時(shí),通過精準(zhǔn)的空間坐標(biāo)(X, Y, H)提取,獲取了架空輸電線路重要巡檢對象的精準(zhǔn)位置信息。這些信息為基于輸電線路三維點(diǎn)云數(shù)據(jù)的架空輸電線路全自動巡檢航跡規(guī)劃提供了堅(jiān)實(shí)的基礎(chǔ),從而推動了輸電線路無人化全自動巡檢技術(shù)的發(fā)展。
5 結(jié) 語
在利用激光雷達(dá)測量技術(shù)進(jìn)行輸電線路三維建模的過程中,前期數(shù)據(jù)采集階段需要對單邊飛行激光雷達(dá)覆蓋范圍、激光雷達(dá)點(diǎn)云密度、精度要求等進(jìn)行仔細(xì)評估。最終試驗(yàn)結(jié)果表明,利用該技術(shù)所建立的三維模型,不僅效果卓越,完成度高,而且能夠極為真實(shí)地展現(xiàn)輸電線路的走廊環(huán)境、桿塔結(jié)構(gòu)、導(dǎo)地線布局以及絕緣子串等關(guān)鍵部件的詳細(xì)信息。
參考文獻(xiàn)
[1] LI S, ZHOU Q, WANG K. Video-based tunnel luminance detection [J]. Automation in construction, 2019, 107: 102900.
[2] LU R, BRILAKIS I K, MIDDLETON C R. Detection of structural components in point clouds of existing RC bridges [J]. Computer-aided civil and infrastructure engineering, 2019, 34: 191-212.
[3]鄒彪,王和平,孟小前,等.基于激光點(diǎn)云技術(shù)的架空輸電線路夜間巡檢系統(tǒng)設(shè)計(jì)[J].信息技術(shù),2020,44(7):44-47.
[4] CHENG Y J, QIU W G, DUAN D Y. Automatic creation of as-is building information model from single-track railway tunnel point clouds [J]. Automation in construction, 2019, 106: 102911.
[5]張勝.基于兩類神經(jīng)網(wǎng)絡(luò)算法在輸電線路中的缺陷識別研究[J]. 長江信息通信,2023,36(9):201-204.
[6]曾昭強(qiáng),夏榮輝.基于實(shí)時(shí)動態(tài)載波相位差分技術(shù)運(yùn)用于施工安全范圍管控的討論[J].建筑技術(shù)開發(fā),2022,49(18):136-138.
[7]倪孝.基于載波相位差分技術(shù)的高精度定位系統(tǒng)研究與實(shí)現(xiàn)[D].揚(yáng)州:揚(yáng)州大學(xué),2021.
[8]蘇曉剛,楊亮亮,彭小強(qiáng),等.載波相位差分技術(shù)在車載導(dǎo)航中的應(yīng)用[J].現(xiàn)代導(dǎo)航,2019,10(4):262-267.
[9]呂揚(yáng).復(fù)雜三維規(guī)劃模型和現(xiàn)狀地形無縫集成方法研究[J].測繪科學(xué),2020,45(10):149-154.
[10]趙昕.基于影像匹配技術(shù)的點(diǎn)云數(shù)據(jù)精簡算法研究[D].西安:西安科技大學(xué),2017.
