基于STM32的多功能醫療小車的設計與制作
2025-02-23 00:00:00樂浩陳靜潘錦怡李夢晨
物聯網技術 2025年4期


摘 要:隨著醫療技術的不斷發展,醫療物資的高效運輸和智能化管理需求逐漸增加。為解決這一問題,設計并制作了一款基于STM32的多功能醫療小車。該小車通過路徑規劃系統實現了醫療物資的智能運輸,同時引入了語音識別技術提高用戶操作便捷性。通過HC-05藍牙模塊,小車能夠將運送結果和人員信息實時傳輸至移動端,實現高效的運輸管理。同時為確保運輸過程的安全性,以MQ-135空氣質量傳感器為主體,集成了氣體體積分數檢測和自動消毒功能,能及時反饋異常情況。本研究綜合運輸效率和醫療環境安全,為醫療物資的智能管理提供了一種全面的解決方案,在家庭和醫療領域具有廣泛的應用前景。
關鍵詞:STM32;多功能醫療小車;HC-05;MQ-135;路徑規劃;語音識別
中圖分類號:TP29 文獻標識碼:A 文章編號:2095-1302(2025)04-00-08
0 引 言
隨著科技的不斷進步,醫療行業對于提高醫療物資運輸效率和管理智能化的需求越來越大。國內很多醫院運送醫療物品的方式主要靠人力和電梯來完成,但該方式存在運輸效率低、交叉感染風險大、安全性差等諸多弊端[1]。針對這些問題,本文設計了基于STM32的多功能醫療小車,通過攝像頭模塊和藍牙模塊使得該小車在自動運輸、手動遙控方面取得了顯著進展,大大提高了運輸效率。本設計還運用了先進的語音識別技術,使用戶能夠以語音方式控制醫藥盒的開關,降低了交叉感染的概率。此外,該裝置還配備了體積分數檢測功能,用于確保醫院的空氣質量安全。
1 設計流程
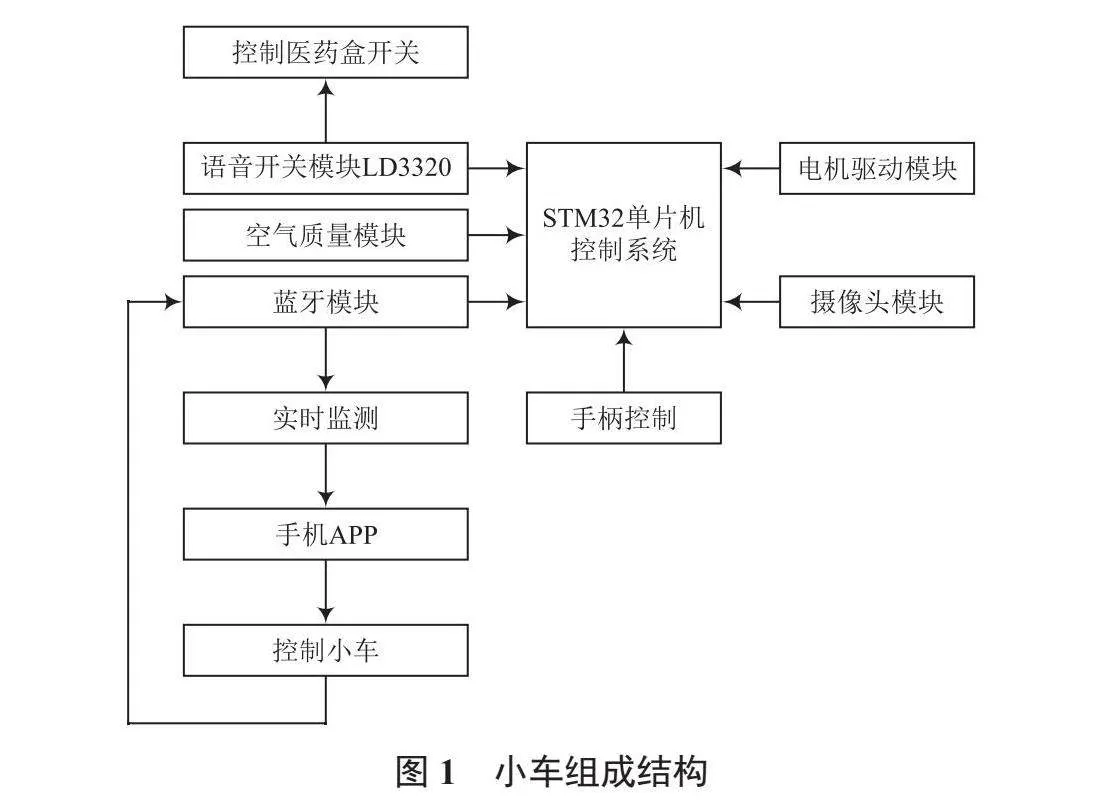
多功能醫療小車的設計和實現基于以STM32為核心的嵌入式系統。該系統硬件電路包括攝像頭模塊、語音開關模塊、空氣質量模塊、藍牙模塊以及電機驅動模塊等;在軟件層面通過設計路徑規劃算法,實現了對智能小車的移動控制,以確保醫療物資能夠被有效送達。語音識別技術用于對醫藥盒的語音控制啟閉,使小車具備智能化特性。
本文采用HC-05藍牙模塊將小車運送結果和人員信息實時傳輸至移動端。空氣質量模塊實現了氣體體積分數的自動檢測和自動消毒功能。在運輸過程中,系統能夠反饋空氣狀況,避免出現二氧化碳或有毒氣體體積分數過高等情況。二氧化碳或有毒氣體體積分數過高時,系統采用自動消毒噴灑裝置噴灑消毒液體,有效降低了病毒傳播的風險。小車組成結構如圖1所示。
車輛采用兩驅坦克底盤。該底盤精致美觀,結實耐用,具有靈活的轉彎能力、高載重等優點。各模塊均被嵌入在車身,通過STM32單片機協同工作,確保各功能模塊高效運行。
2 STM32單片機控制系統的介紹
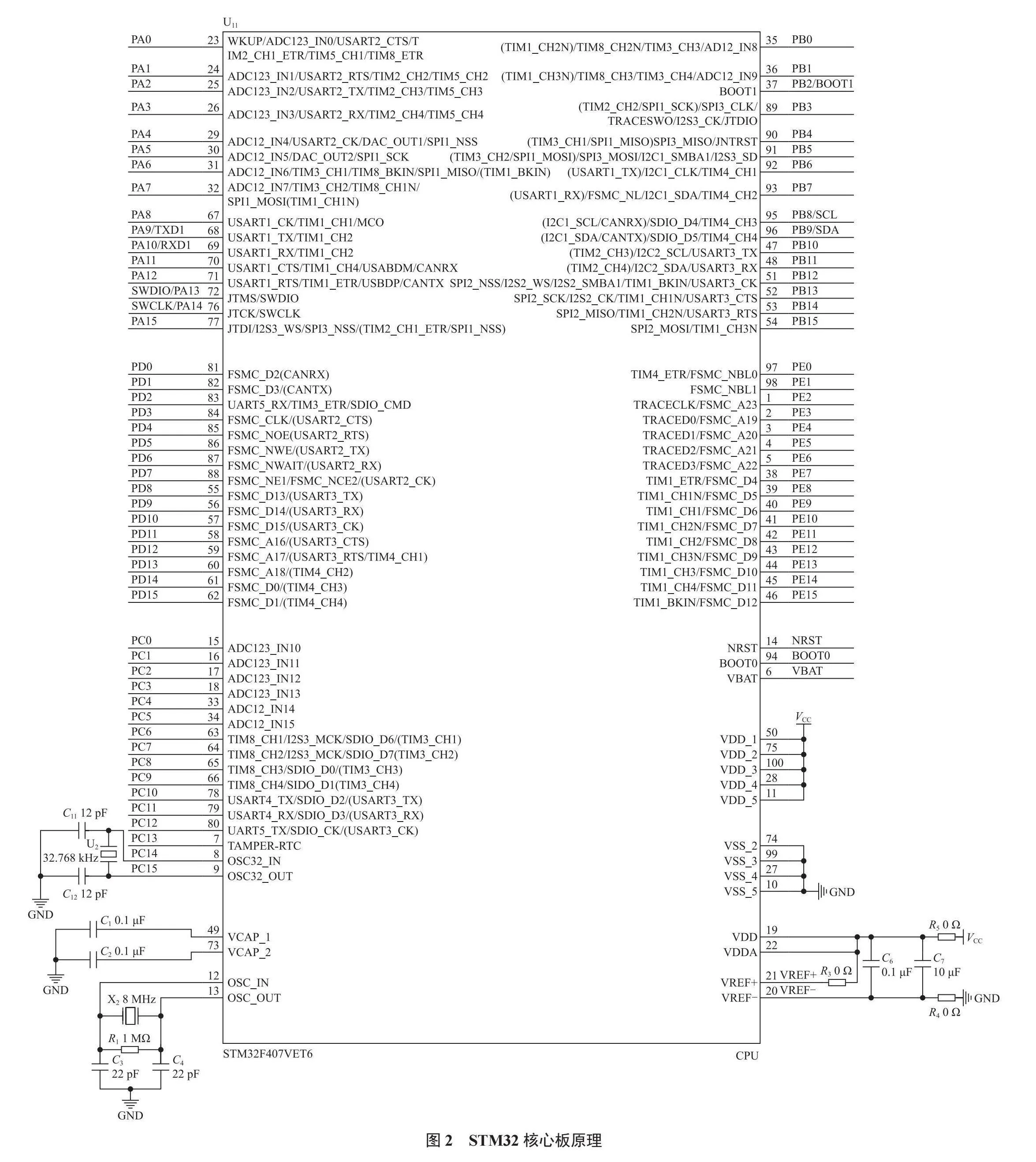
STM32F407VET6是一款由意法半導體出品的32位ARM Cortex-M4內核的單片機。該單片機的主頻可達到168 MHz,配備了高速嵌入式閃存和靜態隨機存儲器,為處理大規模數據和復雜算法提供了足夠的性能支持[2]。同時,STM32F407VET6擁有多個定時器,如通用定時器、高級控制定時器,以及通用異步收發器、通用同步收發器等[3]。這些外設的集成使得單片機能夠被廣泛應用于定時、計數、通信和生成脈沖寬度調制(PWM)等場景。
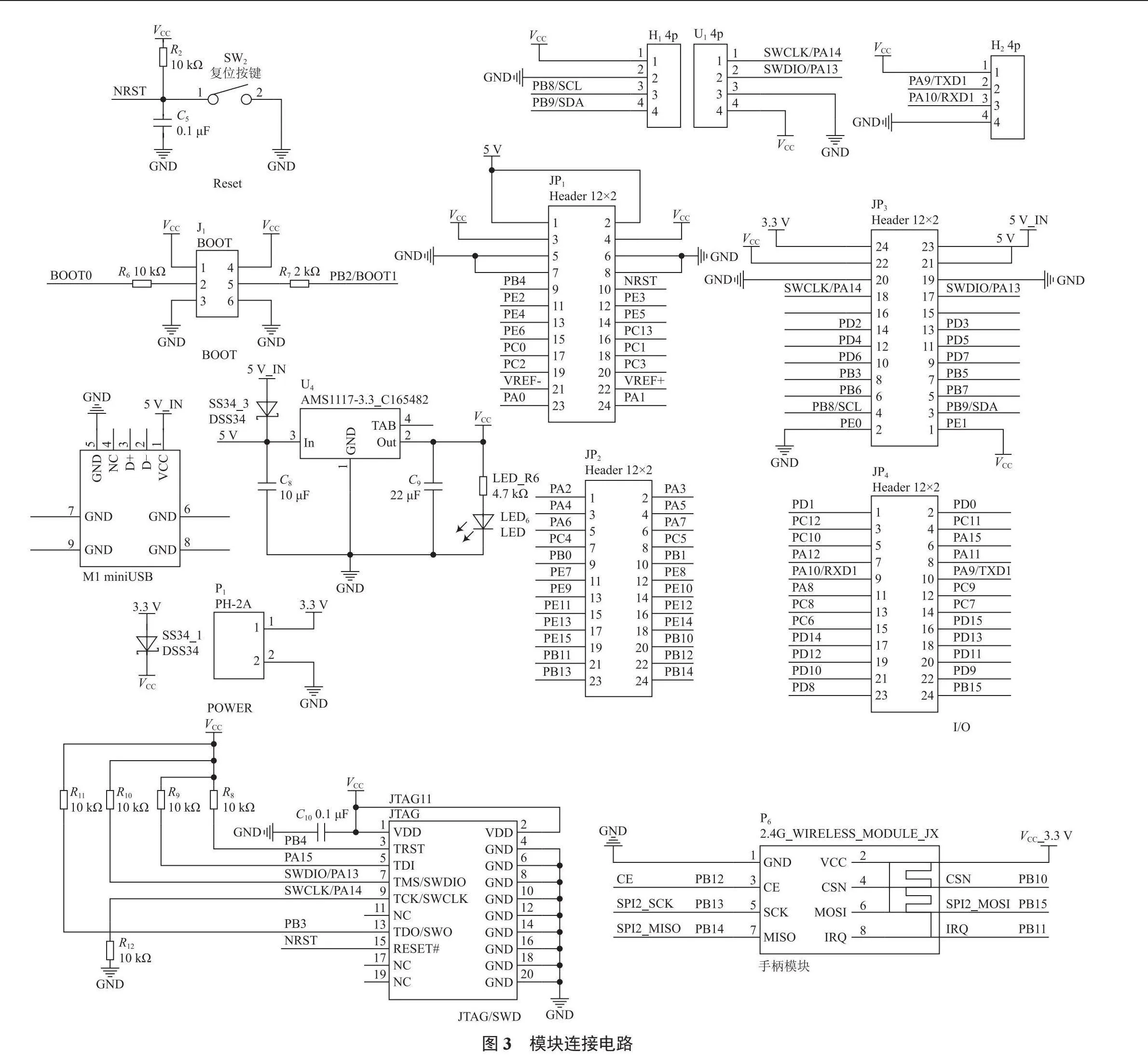
在本設計中,STM32單片機最小系統板中的攝像頭模塊通過I2C串行通信接口連接到相應引腳,并使用GPIO引腳進行控制。STM32單片機能夠接收攝像頭傳感器數據,進行圖像的處理和識別。同時,空氣質量模塊通過UART串行通信接口連接到單片機,由其接收、解析和傳輸數據。電機驅動模塊通過PWM通信接口連接到STM32單片機,生成相應的控制信號以驅動電機模塊,實現所需的運動或操作。空氣質量模塊通過通信接口連接到STM32單片機,單片機發送相應的控制信號啟動或停止消毒過程。STM32核心板原理如圖2所示。模塊連接電路如圖3所示。
3 雙驅有刷電機坦克小車運動模型的建立
雙驅有刷電機坦克小車通常采用兩組電機和輪子構成,其中每組電機控制一個主動輪,這些輪子相互緊靠并通過履帶連接,從而推動坦克小車移動。雙驅有刷電機坦克小車如圖4所示。
控制兩側電機的差異性轉速,能夠實現小車的多樣化運動方式。當兩側電機以相同速度旋轉時,小車直線前進或后退;而若兩側電機旋轉速度不同,則小車轉向;若兩側電機旋轉方向相反,則小車原地轉動。通過精確調整電機速度,小車可實現在復雜路徑上的直線運動和曲線運動。
每側電機控制一個輪子,使得雙驅有刷電機坦克小車具有較小的轉彎半徑,以提升其在狹小空間內的機動性。此外,履帶設計中融入了懸掛系統,極大地改善了車輛在不平坦路面上的穩定性和運動性能。
電機驅動的核心是實現對電機速度大小和方向的精準控制。通過單片機進行比例積分微分(PID)數據的運算和處理,輸出PWM波形,經過電機驅動模塊控制直流電機,實現小車的動態平衡和穩定運動[4]。在直流電機中,調整電壓極性可以控制電機的正向或反向轉動,調整電壓的大小可以控制電機的速度。電壓增大則電機轉速提升,電壓減小則轉速降低。
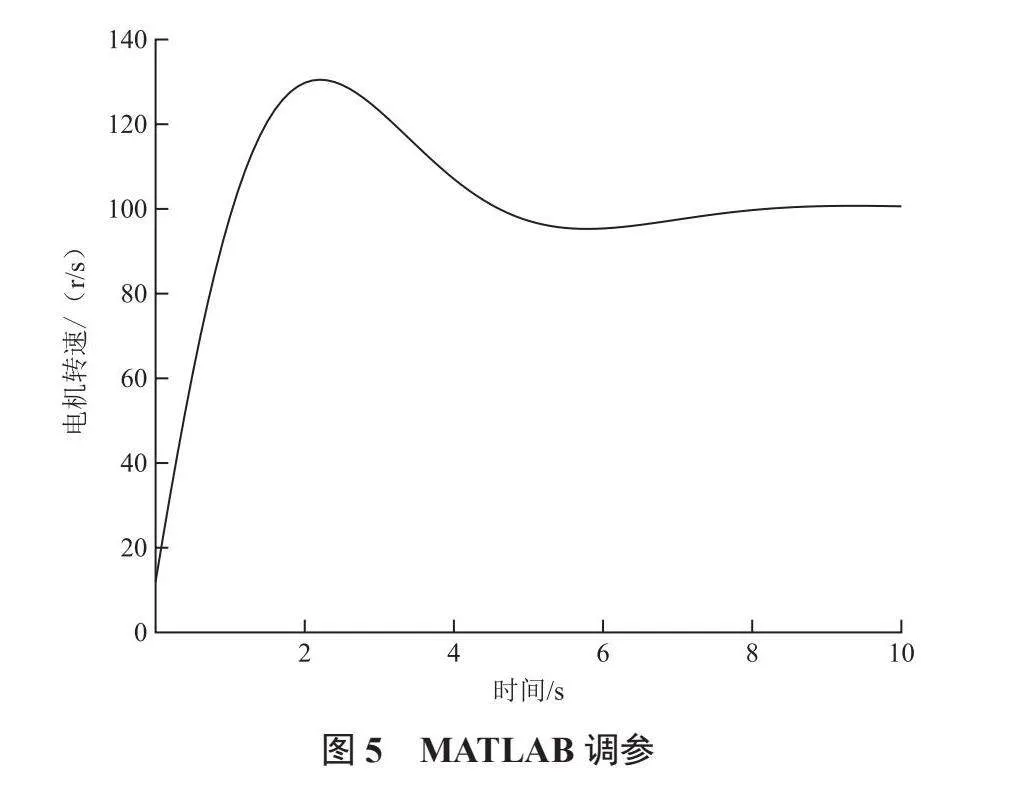
PWM是一種常見的電機速度控制技術。單片機定期交替提供高電壓和低電壓,通過調整高電壓的占空比,可以控制輸出的平均電壓值,從而控制電機的平均速度。為了實現更精準的速度控制,使用編碼器獲取電機的實際速度反饋,并應用PID閉環控制算法來調整電壓,使實際速度接近期望速度[5]。為了達到對目標速度的精準調節,需要調整PID控制器的參數。PID控制的基本原理在于接收目標值與當前值之間的差異信號,并依據特定的情境算法計算控制量,隨后利用該控制量的信號反饋,實現精確的目標控制。MATLAB調參如圖5所示。
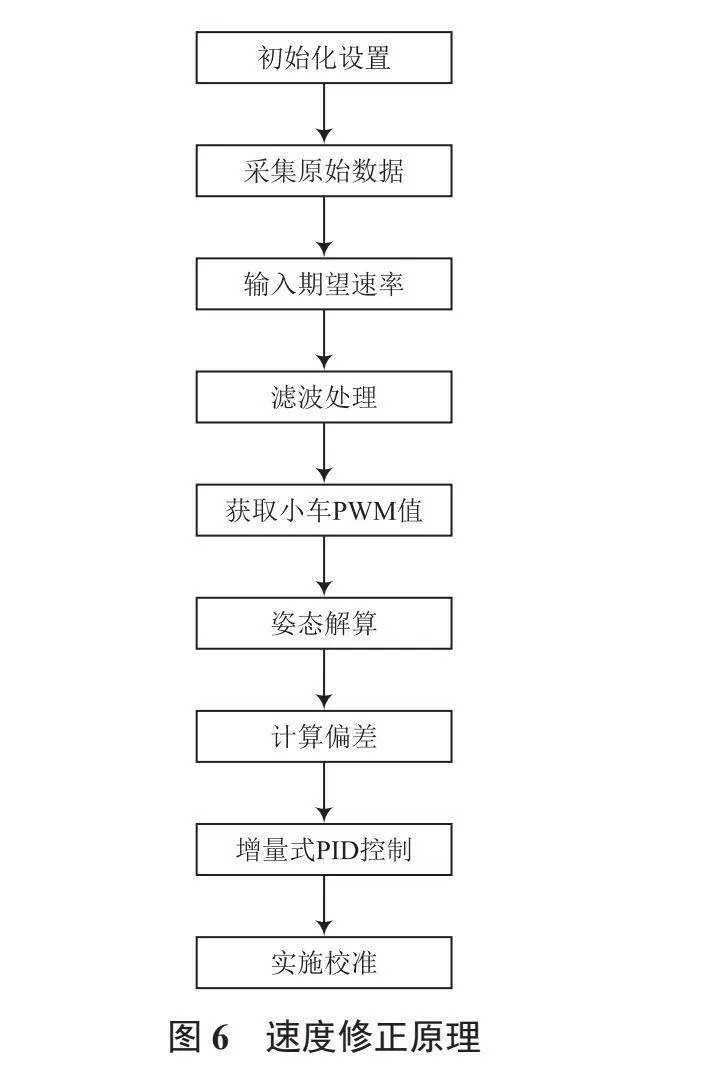
小車的速度和方向確定后,采用姿態傳感器幫助小車維持特定的姿態或方向。選用MPU6050陀螺儀作為姿態傳感器,通過測量繞x軸、y軸、z軸的角速度,并對角速度積分得到小車的旋轉角度[6]。然而,陀螺儀存在累積誤差。隨著時間的推移,角度可能產生漂移。為了解決這一問題,將編碼器獲取的電機速度和陀螺儀測量的旋轉角度相結合,采用均值濾波器估計小車的姿態,使得小車能夠完成更為復雜的任務。速度修正原理如圖6所示。
4 小車與移動設備的信息傳輸設計
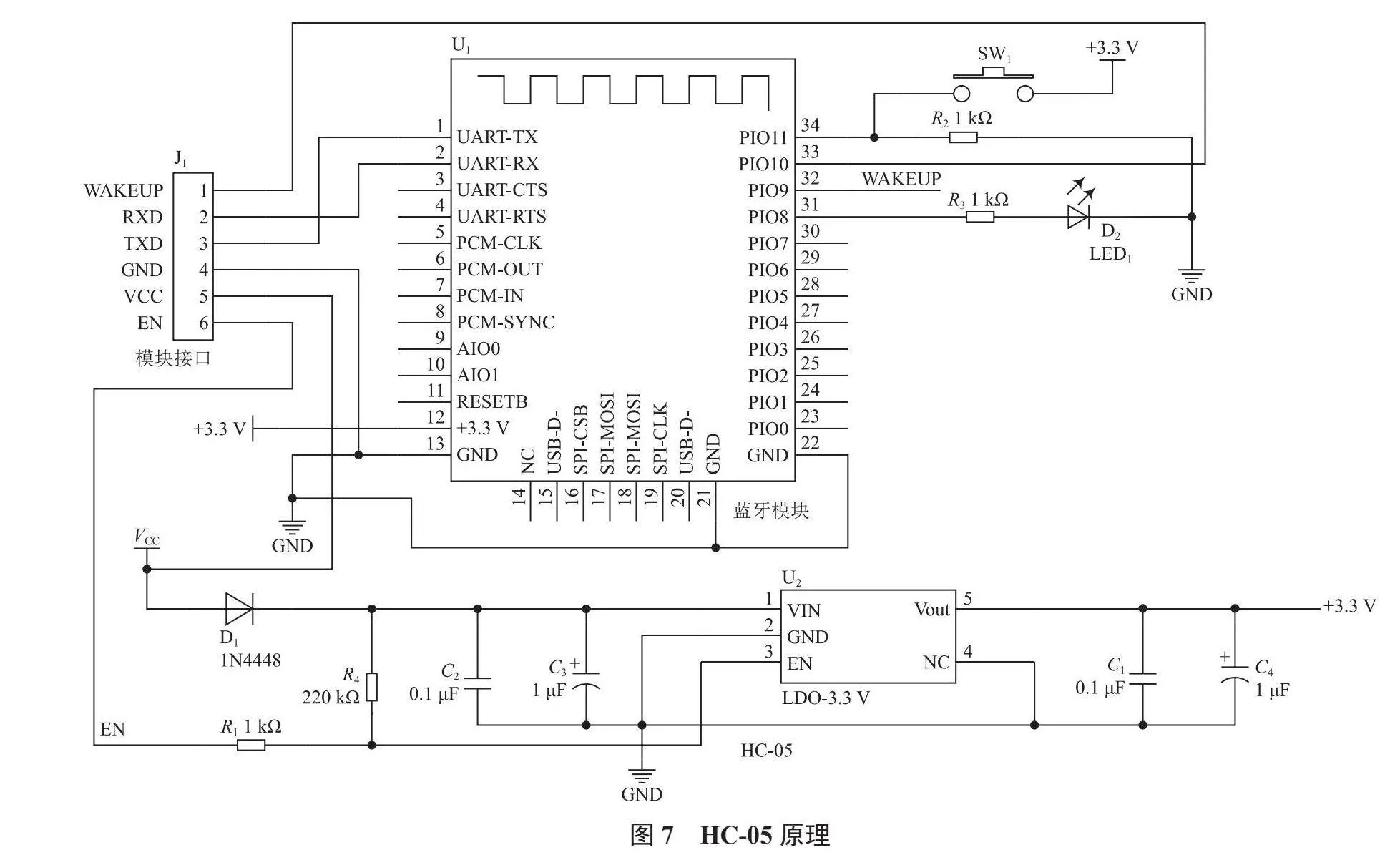
移動設備通過HC-05藍牙模塊(圖7)與小車的微控制器STM32進行數據通信與控制。手柄接收器通過2.4 GHz無線通信方式與小車連接,將手柄的操作信號傳輸給小車。操作信號包括控制軸的位置、按鈕的狀態等。
在小車上連接HC-05藍牙模塊,并將其與小車的微控制器STM32相連。小車的微控制器解析從移動設備接收到的指令,根據指令內容執行相應的操作。例如,如果收到前進的指令,則微控制器控制小車向前移動;如果收到停止的指令,則控制小車電機停轉。
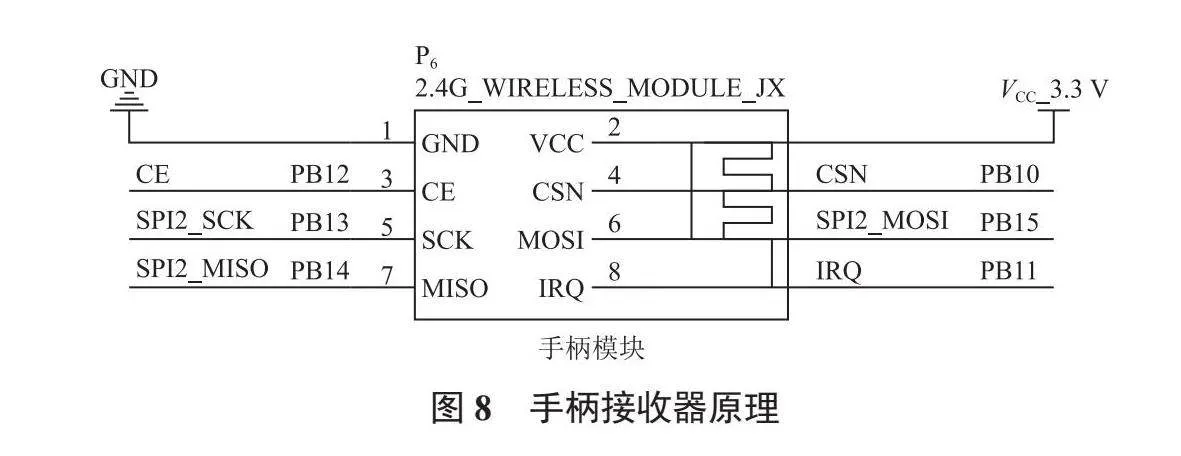
在小車上安裝手柄接收器模塊,并將其與小車的微控制器STM32相連;用戶通過手柄操作控制軸和按鈕;手柄接收器接收到信號后會傳輸給單片機。在這個系統中,用戶通過手柄進行操作,手柄將操作信號編碼為指令,這些指令通過2.4 GHz無線通信方式發送給小車的STM32主控板。STM32主控板負責接收和解析指令,并根據解析結果控制小車執行相應的操作,如前進、后退、左轉、右轉等。整個過程中,手柄接收器起到橋梁的作用,負責接收手柄發出的指令并將其傳輸給小車的STM32主控板,實現了用戶操作與小車動作之間的無線通信。手柄接收器原理如圖8所示。
5 空氣質量檢測設計
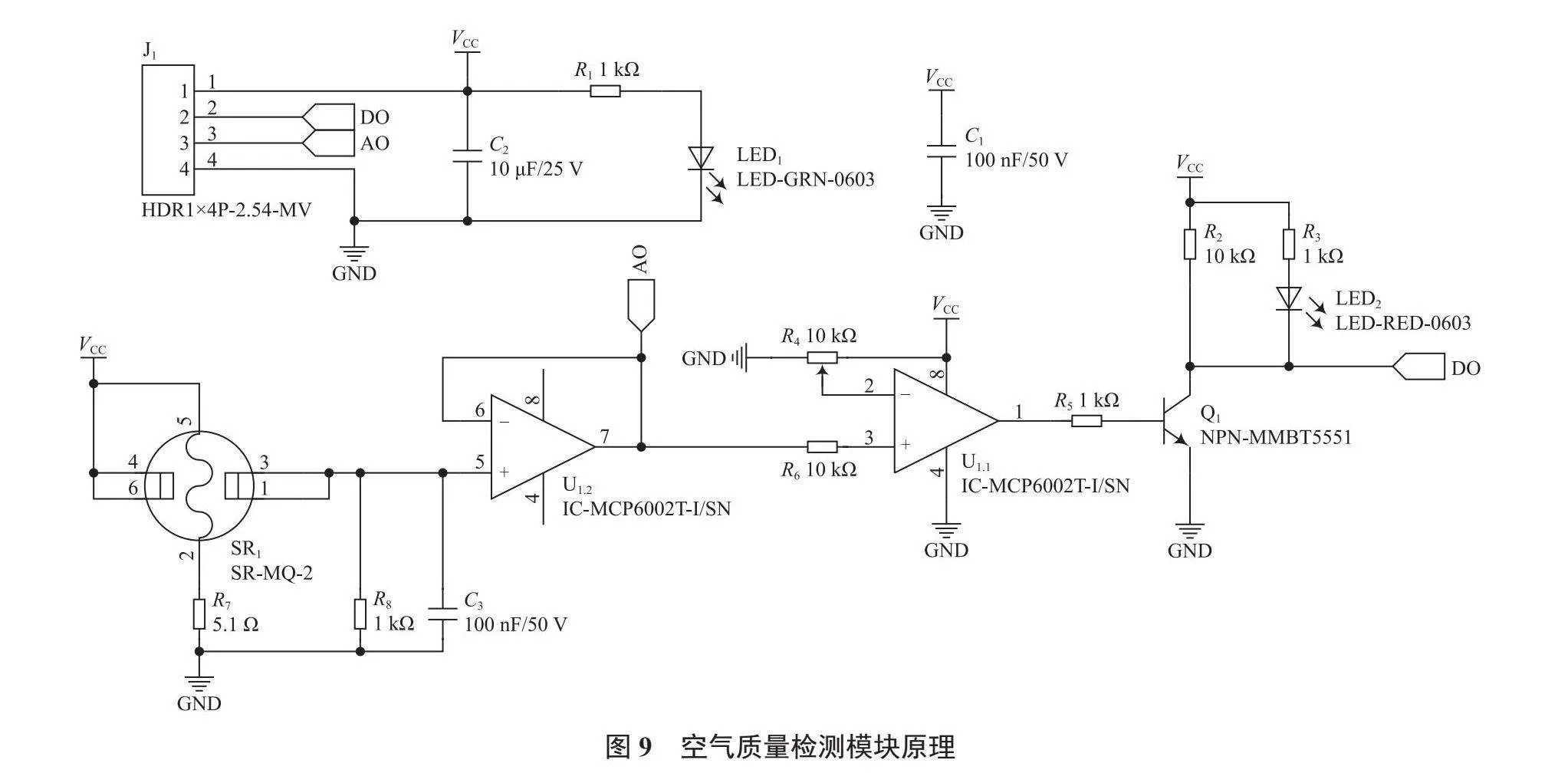
多功能醫療小車裝有MQ-135半導體空氣質量檢測傳感器,實現了對空氣質量的檢測功能。MQ-135對硫化物蒸氣、苯系蒸氣、氨氣等的靈敏度高,同時對其他有害氣體的檢測也較為敏感,適合于多種場合且性價比較高[7]。傳感器的模擬輸出電壓AOUT輸出模擬信號。模擬量輸出隨氣體體積分數的增加而增加,且氣體體積分數越高,輸出電壓就越高[8]。將該模擬量傳送給單片機,通過單片機計算得到空氣中氣體體積分數的近似值。當氣體體積分數超過空氣中的閾值(閾值可以通過調節傳感器的電位器來改變)時,數字輸出引腳DOUT變為高電平。將該引腳接信號燈,則輸出高電平時信號燈亮。將模塊上電,即可從指示燈上觀察到空氣中的危險氣體體積分數是否超標。如果有害氣體體積分數超標,指示燈亮起。空氣質量檢測模塊原理如圖9所示。
6 電磁鎖智能語音識別與控制
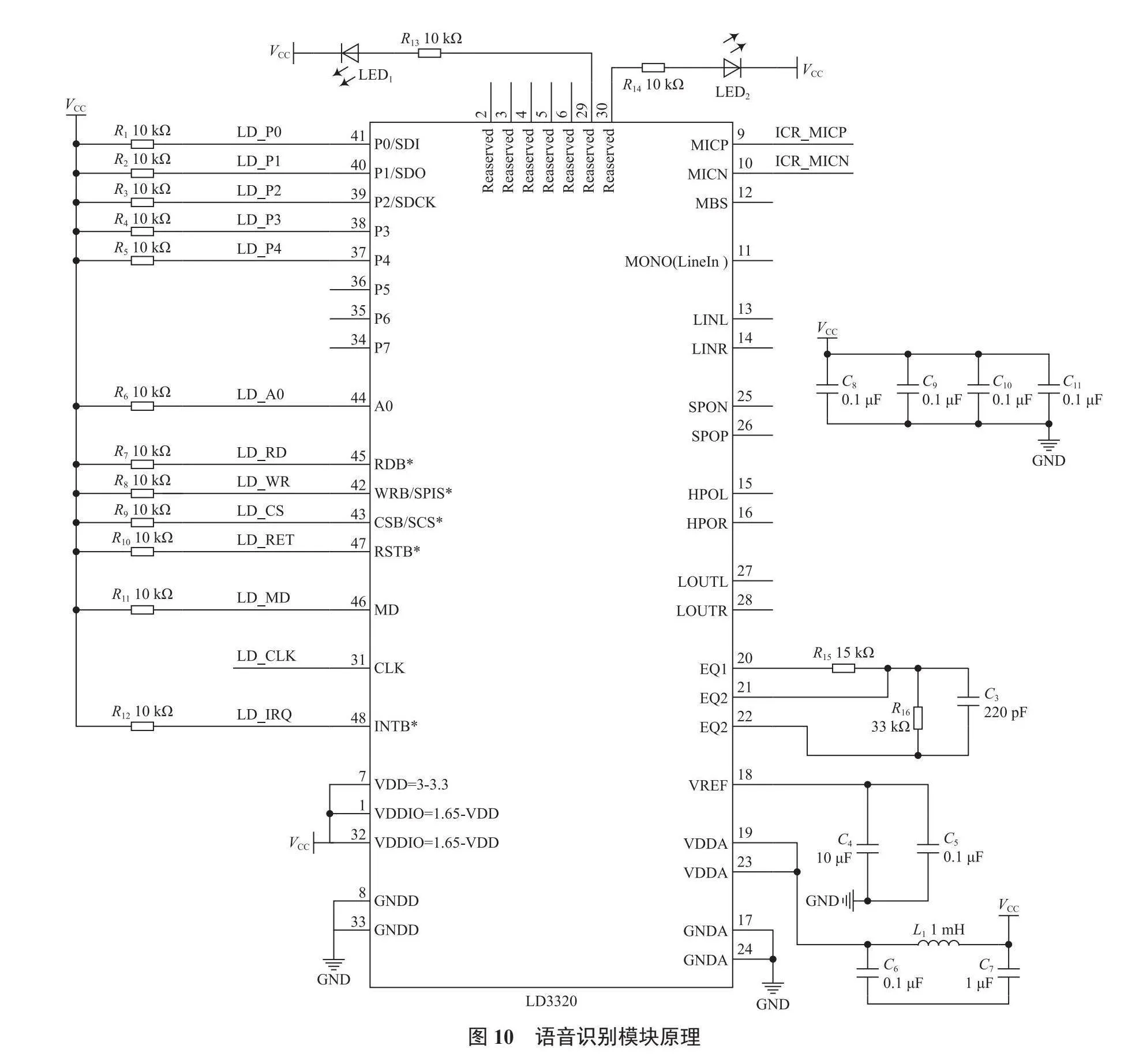
采用語音識別技術控制小車上的醫藥盒是否開啟。只有當用戶說出正確的取藥人姓名時,系統識別成功后才會解鎖電磁鎖,允許用戶取出藥品。本設計采用LD3320語音識別芯片,其具備處理最多50條指令的能力。語音識別芯片實現了用戶語音指令的識別,采用SPI通信協議將語音識別結果傳輸給STM32單片機。單片機接收信息后控制醫藥盒的電磁鎖開閉,有效實現了醫藥盒電磁鎖的智能語音識別與控制。用戶還可以通過修改拼音的方式,調整語音識別的詞條[9]。
電磁鎖系統由MOS管驅動模塊和電控鎖組成。通過控制I/O口的高低電平,實現電磁鎖的開閉。當針對LD3320的一、二級口令語音識別正確時,單片機的TXD串口會置高電平,而當電磁鎖的I/O/PWM串口置高電平時,電磁鎖打開。所以只需將單片機的TXD串口連接電磁鎖的I/O/PWM串口即可。當用戶正確說出取藥人姓名時,電磁鎖會自動彈開,取藥人能夠順利取出藥品;當用戶說出無關人員姓名時,電磁鎖保持閉鎖狀態,取藥人無法取出藥品。通過這樣的設計,系統實現了電磁鎖的自動開閉,為用戶取藥提供了便利。語音識別模塊原理如圖10所示。
7 數字識別與巡線設計
為了能夠識別病房門牌號,采用機器識別技術從圖像中提取數字信息,實現對病房門牌號的自動識別。另外結合巡線設計,車輛可自動導航至目標病房,提高了醫療物資的運輸效率。
采用OpenMV4攝像頭模塊與機器視覺識別算法進行數字識別與巡線設計。OpenMV4是一款集成了OV7725攝像頭芯片,基于MicroPython的嵌入式機器視覺模塊。該模塊在實際應用中展現了優異的性能,包括直線識別、歸一化互相關系數(NCC)模板匹配以及邊緣檢測等。
在實際應用場景中,由于OpenMV4無法同時利用threading、concurrent.futures多線程庫和asyncio、curio協程庫,因此無法同時進行數字識別和執行巡線代碼。考慮到醫院病房位置相對固定,因此讓小車在OpenMV4完成數字識別并將結果發送至STM32單片機后,再執行巡線代碼。這樣的設計允許單片機根據數字識別結果進行路徑規劃,有助于降低小車在行駛過程中出現錯誤的可能性。
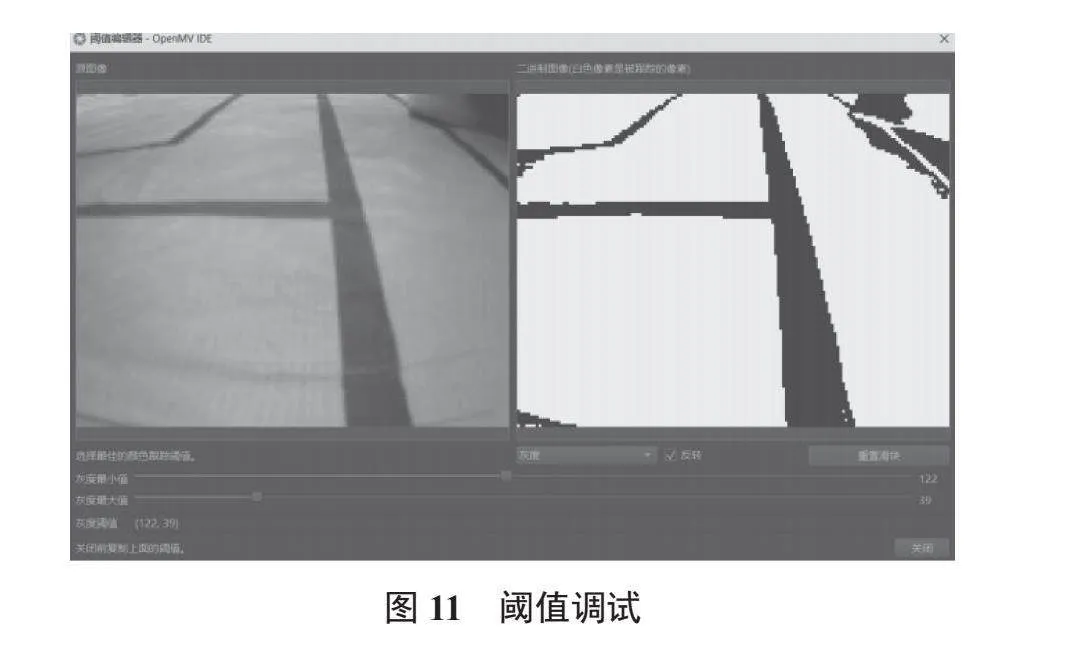
在數字識別方面,通過對圖像進行二值化處理,并利用NCC模板將識別到的數字與事先保存的數字圖片進行閾值匹配,以獲取最終結果,如圖11所示。
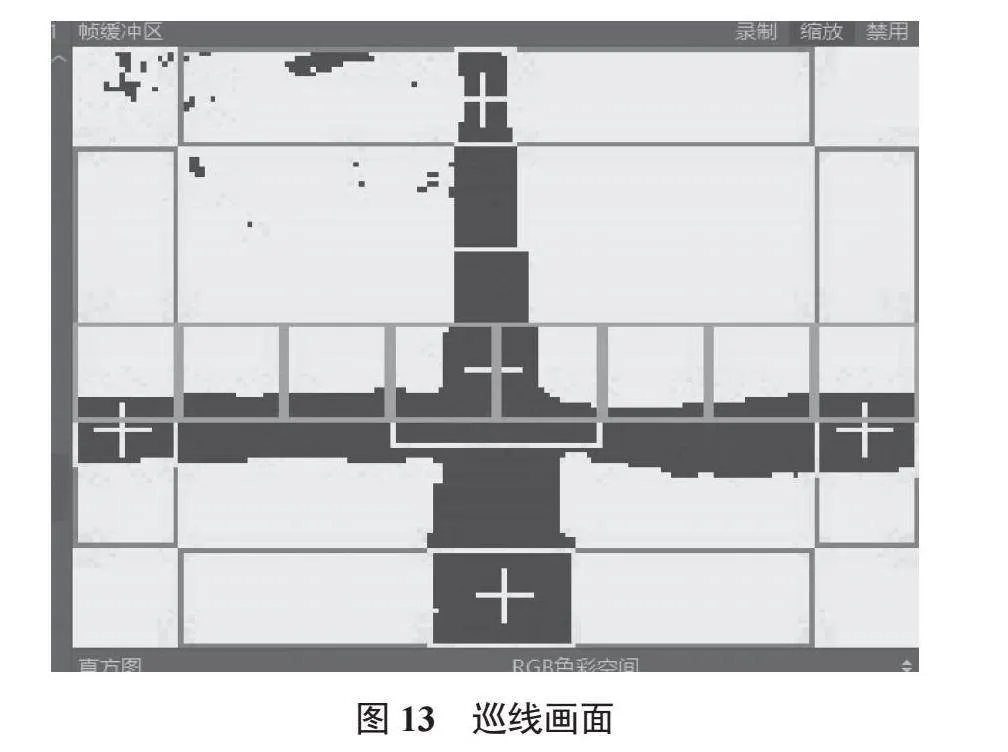
在巡線設計方面,將圖像劃分為上下左右4個部分,通過檢測4個框內是否存在路線來確定路口類型(十字路口、T字型路口、直角彎路口),并根據識別結果按路線行駛。
OpenMV4提供了多種通信接口,包括UART、I2C、SPL等,以便與其他設備進行通信和控制[10]。本設計選用UART與微控制器STM32通信。數字識別完成后,系統立即執行巡線代碼,STM32單片機負責接收巡線信息,將數字識別結果和巡線信息相結合,從而控制電機執行前進、左轉、右轉或停止操作。
8 成果測試
由于數字識別和巡線設計的整合旨在提高小車行駛過程中的準確性和安全性,因此對OpenMV4在小車導航應用中的數字識別與巡線控制進行了全面驗證。為了確保系統的可靠性,對藍牙與手柄遙控進行了相關驗證。此外,還測試了系統所有的功能模塊,如語音開鎖模塊等。
測試步驟包括數字識別、巡線控制、差速調試、藍牙遠程遙控、語音識別開鎖以及空氣質量檢測等。
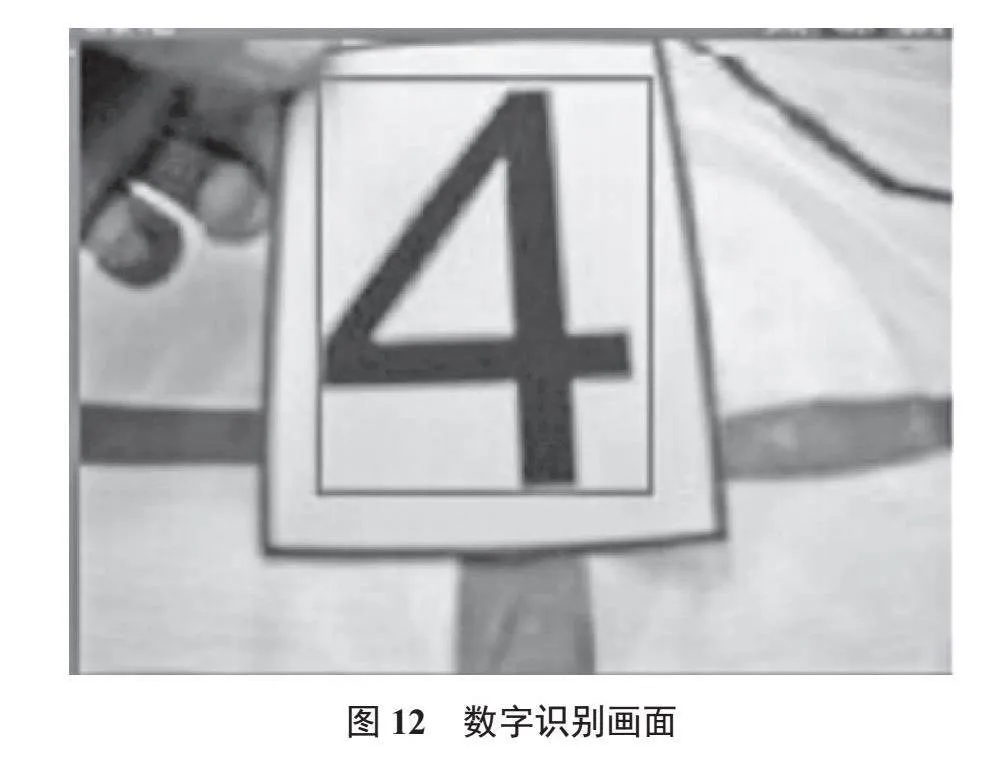
在數字識別測試過程中,模擬了不同數字場景,通過輸入一系列數字圖像來測試系統的識別準確性,并執行數字識別代碼。實驗結果證明,本設計的識別準確率較高,與保存的數字圖片匹配,符合預期。數字識別畫面如圖12所示。
巡線控制測試模擬了不同路口的路面情況和線路形狀,通過攝像頭模塊檢測線路并進行車輛方向控制。結果表明,小車成功根據巡線信息穩定行駛且能避免偏離軌道,確保了系統在各種復雜環境中能夠有效巡線。巡線畫面如圖13所示。
在差速調試測試中,對車輛進行了一系列速度和方向的變化測試,檢測系統是否能夠實時調整差速以保持良好的運動穩定性。經實驗檢測,當比例系數KP為0.4、積分時間常數KI為0、微分時間常數KD為0.2時,系統的運動穩定性最高。通過電機差速PID調節,提高了小車整體運動控制的精度,使小車能夠靈活應對各種路況。
在藍牙遠程遙控測試中,測試了遠程遙控的響應時間、穩定性和安全性。小車在遠程控制情況下能夠及時響應,確保了遠程操控的可行性,保證了用戶能夠方便、可靠地遠程控制車輛。藍牙控制界面如圖14所示。
在語音識別開鎖的測試過程中,測試了系統對各種語音指令的識別率,并確保在不同環境噪聲條件下,語音識別功能仍然可靠。語音識別開鎖測試驗證了醫藥箱能夠通過語音指令進行開鎖等操作,增強了系統的人機交互性。
在空氣質量檢測模塊的測試過程中,首先,使用標準氣體校準零點和滿量程來建立一個可信的基準;其次,通過模擬不同的氣象條件,驗證了檢測模塊在各種環境下的穩定性和適應性,以及對污染源變化的迅速響應能力,有效保障了小車環境的安全性。
測試結果表明,小車導航系統在數字識別、巡線控制、電機差速PID調節、藍牙手柄通信傳輸、語音識別開鎖和空氣質量檢測等方面取得了良好的實際效果。這不僅提升了小車在醫院環境下的導航能力,還增強了系統的智能性、實時性和安全性,為醫院內部物流運輸提供了可靠的解決方案。
9 結 語
本文設計了一款基于STM32的多功能醫療小車。該小車結合語音、通信等技術,實現了路徑規劃和醫療物資的智能運輸。然而,小車在復雜環境中的自主導航仍存在局限性,需要進一步優化算法和傳感器。同時,小車可能存在數據干擾和誤判等問題,穩定性和可靠性需要加強。本研究為醫療物資運輸提供了借鑒,未來需致力于提高小車的導航性能,更好地服務于醫療行業。
參考文獻
[1]呂昇桂.智能軌道物流路徑規劃與監控系統的研究與實現[D].成都:電子科技大學,2022.
[2]劉夢亭,庾振邦,馬一飛.基于MATLAB/SimuLink仿真的STM32F407VET6六軸無人飛行器PID控制[J]. 電子世界,2020(11):116-118.
[3]王順浩.基于STM32F407VET6的商用冷水機組控制系統的研發[D]. 杭州:杭州電子科技大學,2020.
[4]林關成.基于STM32的智能平衡小車控制系統設計[J].信息技術,2021(2):44-49.
[5]程宗政.改進的模糊神經網絡PID算法的研究與應用[D].上海:上海工程技術大學,2020.
[6]李臣龍,強俊.基于STM32和MPU6050姿態解算的研究與實現[J].佳木斯大學學報(自然科學版),2017,35(2):295-298.
[7]孫洪濤,李望榮.一種基于STM32單片機的智能氣體檢測與通風系統設計[J].長江信息通信,2022,35(5):108-111.
[8]馮林.一種用于家庭室內空氣質量檢測設備的設計[J].商品與質量,2011(z4):228-229.
[9]杜銀,羅浩敏,方鑫,等.基于語音識別的智能家居系統設計[J].電子測試,2019(18):17-18.
[10]陳宇翔.基于超級電容和OpenMV4的無線充電循跡電動小車設計[J].集成電路應用,2021,38(11):10-12.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
