一種理想二極管的雙電池充放電均衡電路設計
2025-02-23 00:00:00陳娟吳林
物聯網技術 2025年4期



摘 要:針對車載125 W電臺電源直接為24 V/60 A·h雙電池充電或放電過程中,因電池內阻等差異出現充放電電流不均衡,對電池與車載電源造成一定程度損傷,影響電池使用壽命的問題,設計了一種雙電池充放電均衡電路,采用硬件電路與軟件程序共同實現雙電池充放電均衡功能。硬件電路將理想二極管(凌特LTC4357)與電流霍爾傳感器(中霍傳感CHCS-LTS3.3)作為核心器件,軟件程序采用C8051F030實現,并通過LTspice IV電路仿真軟件對雙電池充放電的硬件電路進行仿真,使用車載125 W電臺電源對雙電池的充電與放電過程進行加電測試,均驗證了該電路具有雙電池充放電的均衡功能。
關鍵詞:雙電池;充電均衡;供電均衡;LTC4357;C8051F030;CHCS-LTS3.3;LTspice IV
中圖分類號:TP29;TM464 文獻標識碼:A 文章編號:2095-1302(2025)04-00-07
0 引 言
車載125 W電臺電源是一種多功能電源(兼容交直流輸入),針對24 V/60 A·h雙電池充放電過程中出現電流不均衡導致電池使用壽命較短的問題[1],本文設計了一種基于理想二極管控制的充放電均衡電路,該電路具有防電流倒灌、充放電均衡功能。
電源電池充放電模式:交流電輸入時,充電電流可設定為三檔(40 A、20 A、10 A,微機智能切換),單電池充電或雙電池充電;直流電輸入時,充電電流可設定為兩檔(13 A、6 A,微機智能切換),單電池充電或雙電池充電[2]。電池放電模式:單電池放電或雙電池放電。
1 設計原理
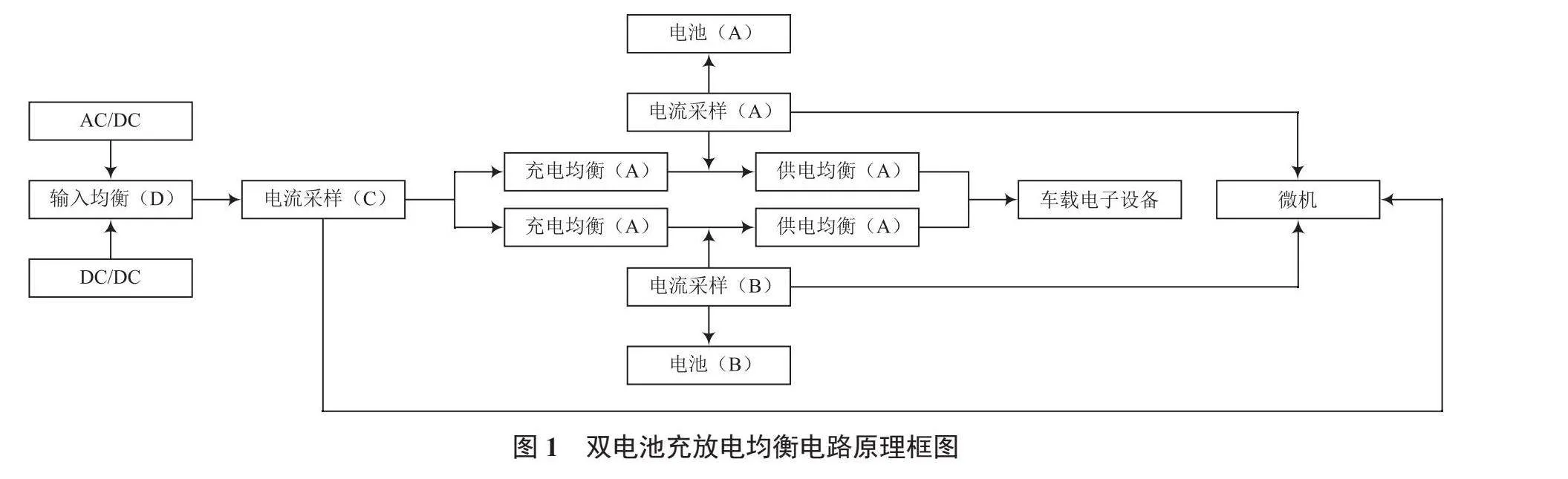
圖1為雙電池充放電均衡電路原理框圖,在均衡電路結構中,含輸入均衡電路(D),對交直流輸入進行均衡控制。電流采樣電路(C)對交直流輸入的總電流進行采樣。充電均衡電路(A)和供電均衡電路(A)共同對單/雙電池充放電進行均衡控制。電流采樣電路(A、B),對電池充放電電流進行采樣。微機單元智能控制AC/DC或DC/DC部分。
2 均衡電路設計
2.1 輸入均衡電路(D)設計
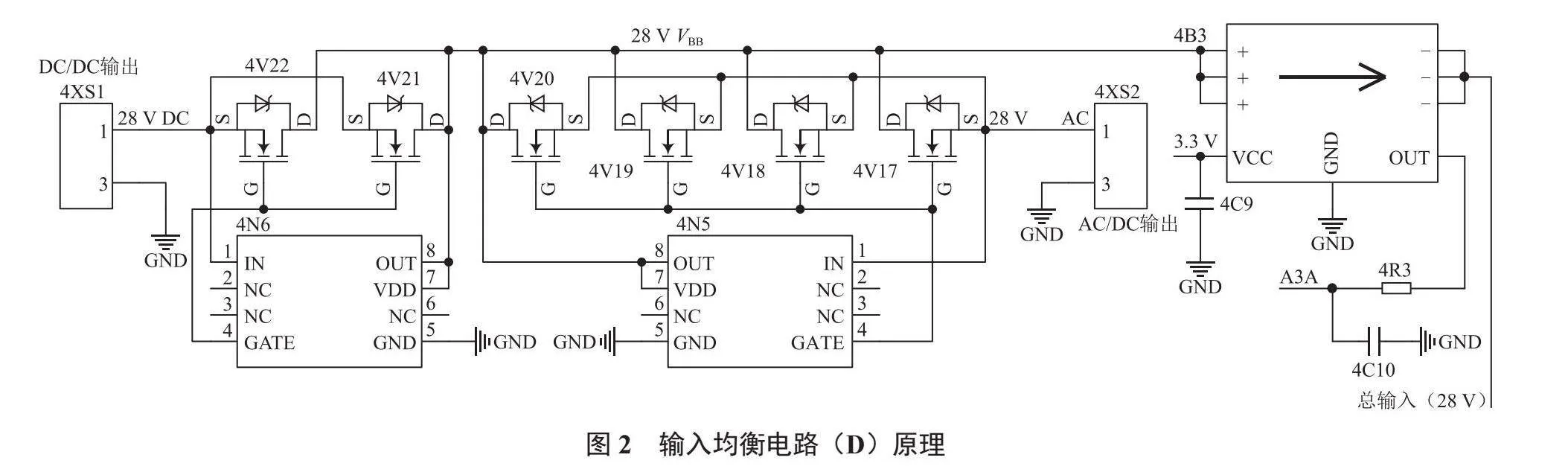
圖2為輸入均衡電路(D),其包含直流輸入均衡電路和交流輸入均衡電路。直流輸入均衡電路由凌特LTC4357(4N6)與NMOS(4V21和4V22)組成。交流輸入均衡電路由凌特LTC4357(4N5)與NMOS(4V17~4V20)組成。交流輸入時電池最大充電電流為40 A,而直流輸入時最大充電電流只有13 A[3]。
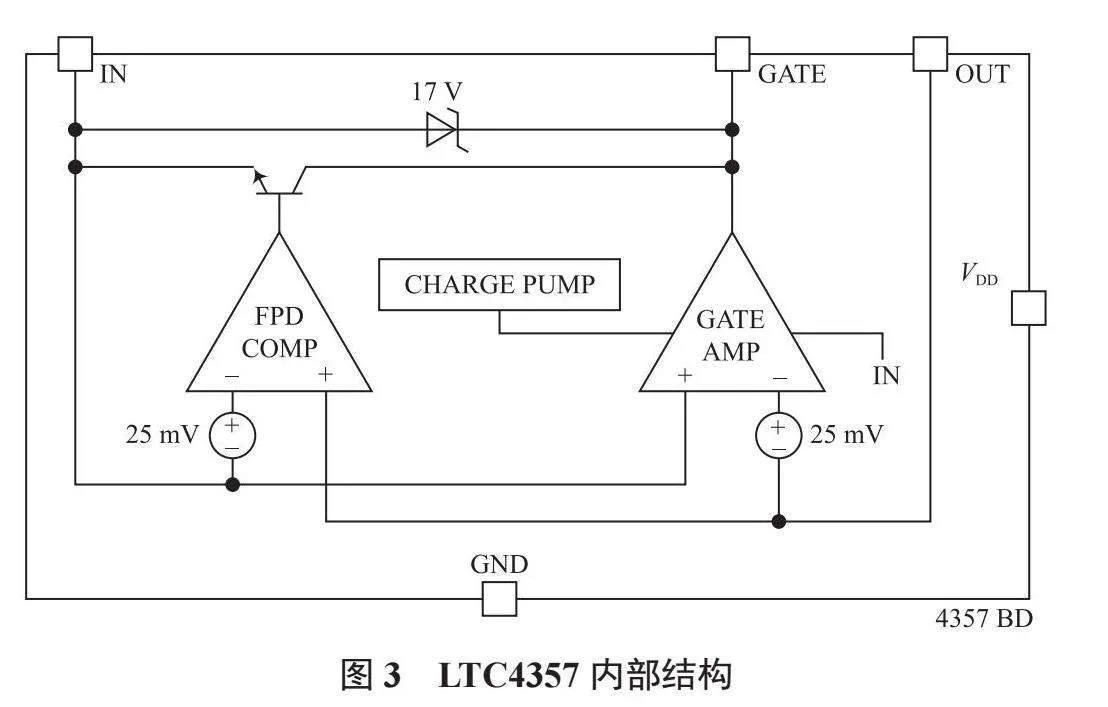
LTC4357內部結構如圖3所示。輸入通過NMOS二極管產生電流,LTC4357引腳IN與引腳OUT出現正向且大于25 mV的電壓,LTC4357內部比較器產生相應的高低電平,并驅動引腳GATE至NMOS完全導通。若引腳IN與引腳OUT有反向且大于25 mV的電壓,則引腳GATE至NMOS完全關斷,從而起到防倒灌和均衡輸入電流的作用。4B3為電流霍爾傳感器CHCS-LTS3.3,信號A3A為檢測輸入的總電流,即電流采樣電路(C)的輸出[4]。
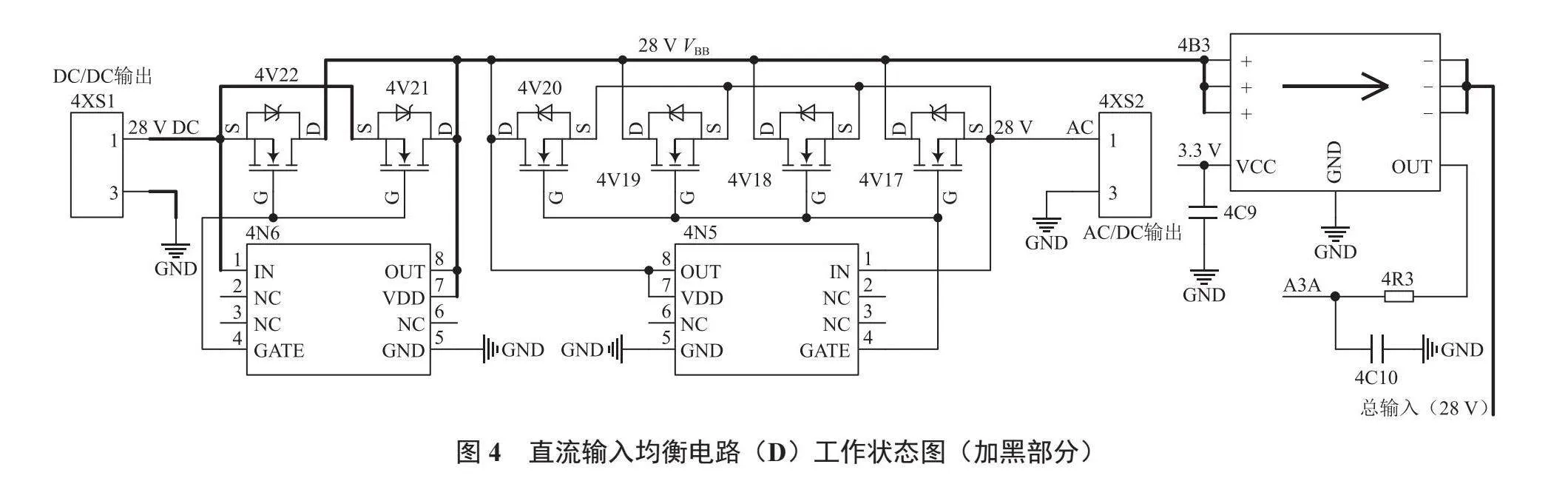
圖4為直流輸入均衡電路(D)工作狀態圖。直流輸入的輸出從連接器4XS1進入相應電路后,通過NMOS(4V21和4V22)體二極管產生大于+25 mV的壓差,并通過NMOS(4V17~4V20)體二極管產生小于-25 mV的壓差,使得LTC4357(4N6)的GATE產生高電平,NMOS(4V21~4V22)導通,LTC4357(4N5)的GATE產生低電平,NMOS(4V17~4V20)斷開,電流從電流霍爾傳感器4B3流出到雙電池充放電均衡電路輸入端[5]。
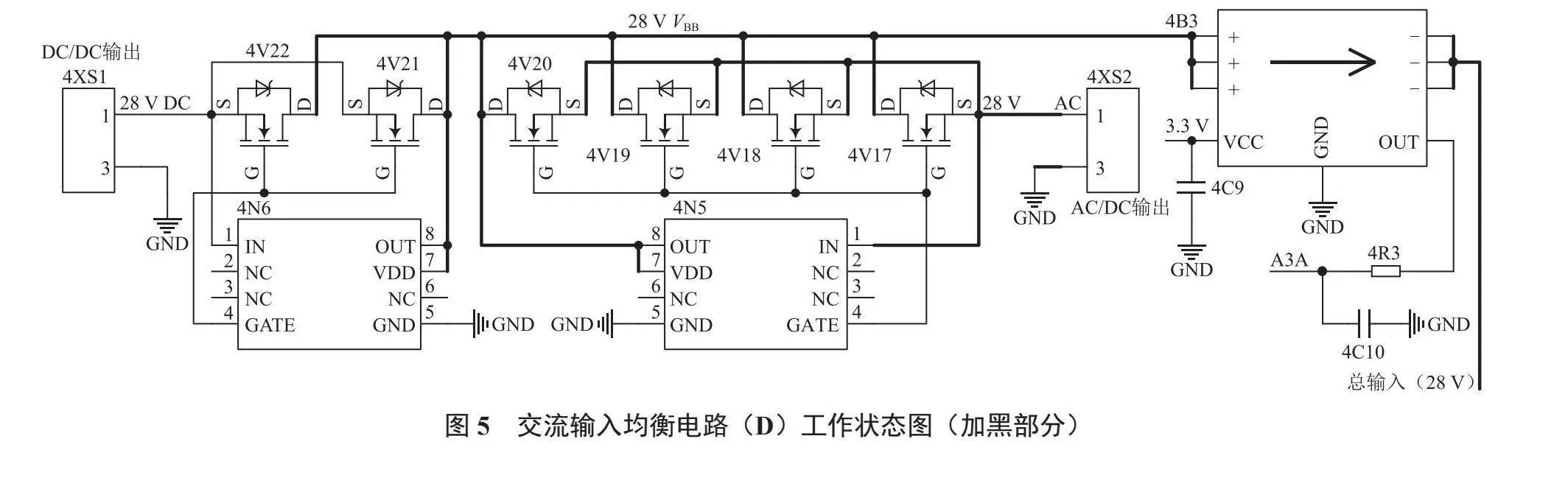
圖5為交流輸入均衡電路(D)工作狀態圖。交流輸入的輸出從連接器4XS2進入相應電路后,通過NMOS(4V17~4V21)體二極管產生大于+25 mV的壓差,并通過NMOS(4V21~4V22)體二極管產生小于-25 mV的壓差,使得LTC4357(4N5)的GATE產生高電平,NMOS(4V21~4V22)斷開,LTC4357(4N5)的GATE產生高電平,NMOS(4V17~4V20)導通,電流從電流霍爾傳感器4B3流出到雙電池充放電均衡電路輸入端[6]。
2.2 充/供電均衡電路設計
充/供電均衡電路共有3種工作模式。充電模式:交流輸入時,電壓范圍為(29.2±0.1)~(24±0.1)V(充電電流為三檔:40 A、20 A、10 A);直流輸入時,電壓范圍為(29.2±0.1)~(24±0.1)V(充電電流為兩檔13 A、6 A)。電池供電模式:電池電壓為24 V(電流為40 A~0 A);單/雙電池充電模式:先恒流后恒壓充電,充滿后關斷。不接電池供電模式:交直流輸入時直接為車載電子設備供電[7]。
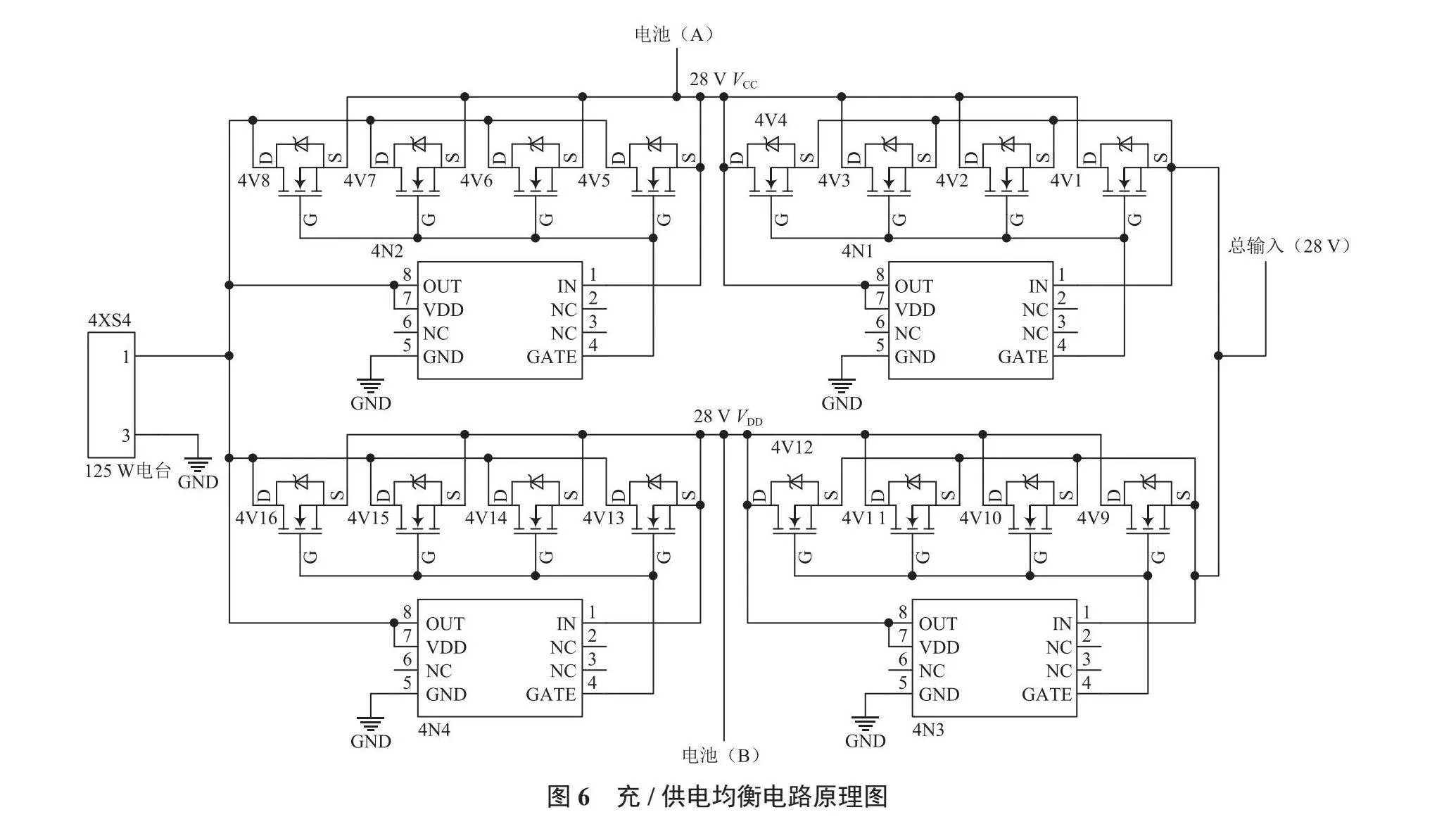
圖6為充/供電均衡電路原理圖,其主要由凌特LTC4357(4N1~4N4)與NMOS(4V1~4V16)組成。凌特LTC4357工作原理與輸入均衡電路(D)相同。
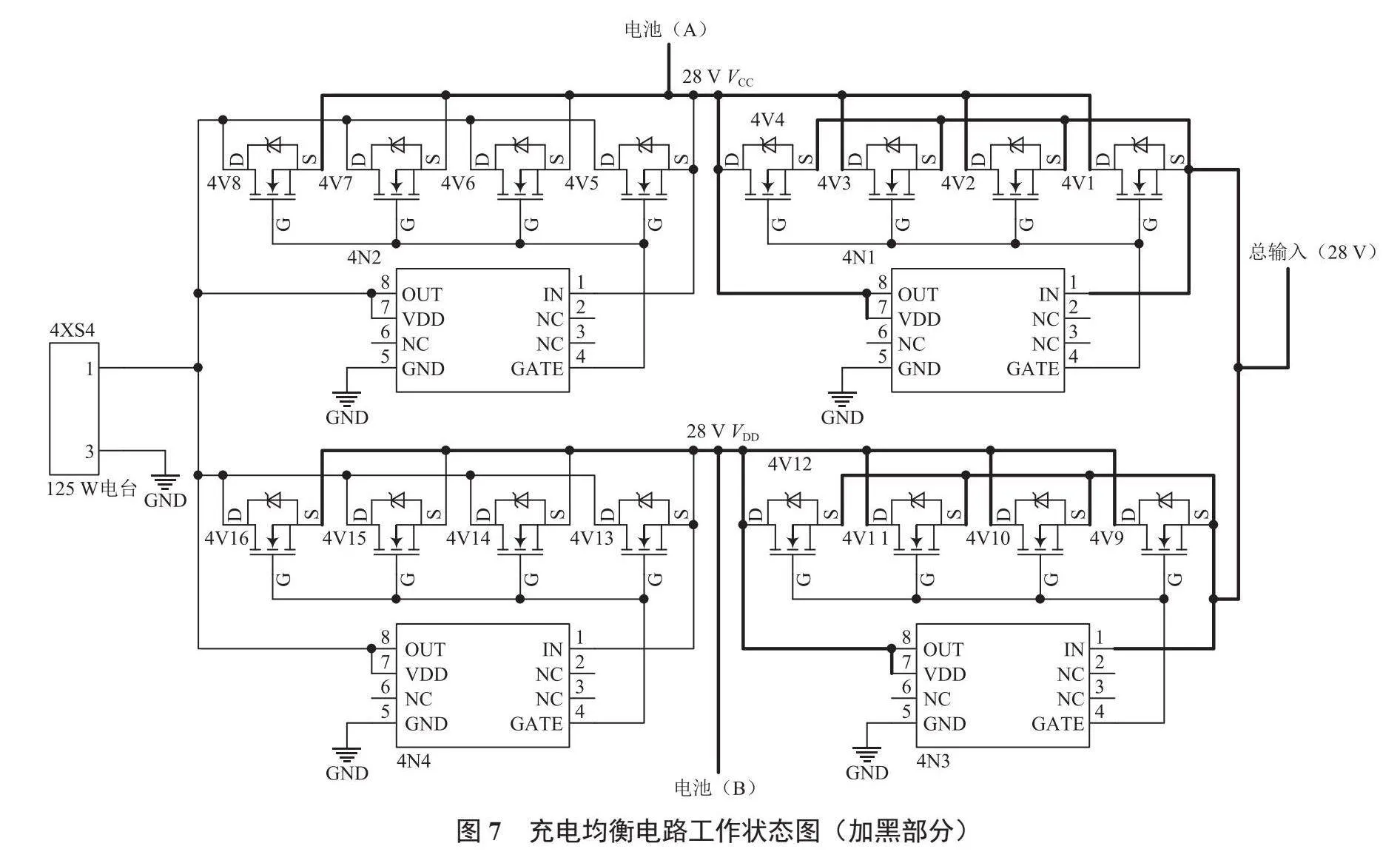
圖7為充電均衡電路工作狀態圖,通過4B3電流霍爾傳感器輸出的總輸入流經NMOS(4V1~4V4,4V9~4V12)體二極管,產生大于+25 mV的壓差,并通過NMOS(4V5~4V8,4V13~4V16)體二極管產生小于-25 mV的壓差,從而使得LTC4357(4N1,4N3)的GATE產生高電平,NMOS(4V1~4V4,4V9~4V12)導通,LTC4357(4N2,4N4)的GATE產生低電平,NMOS(4V5~4V8,4V13~4V16)斷開,電流流向電池(A)和電池(B)[8]。
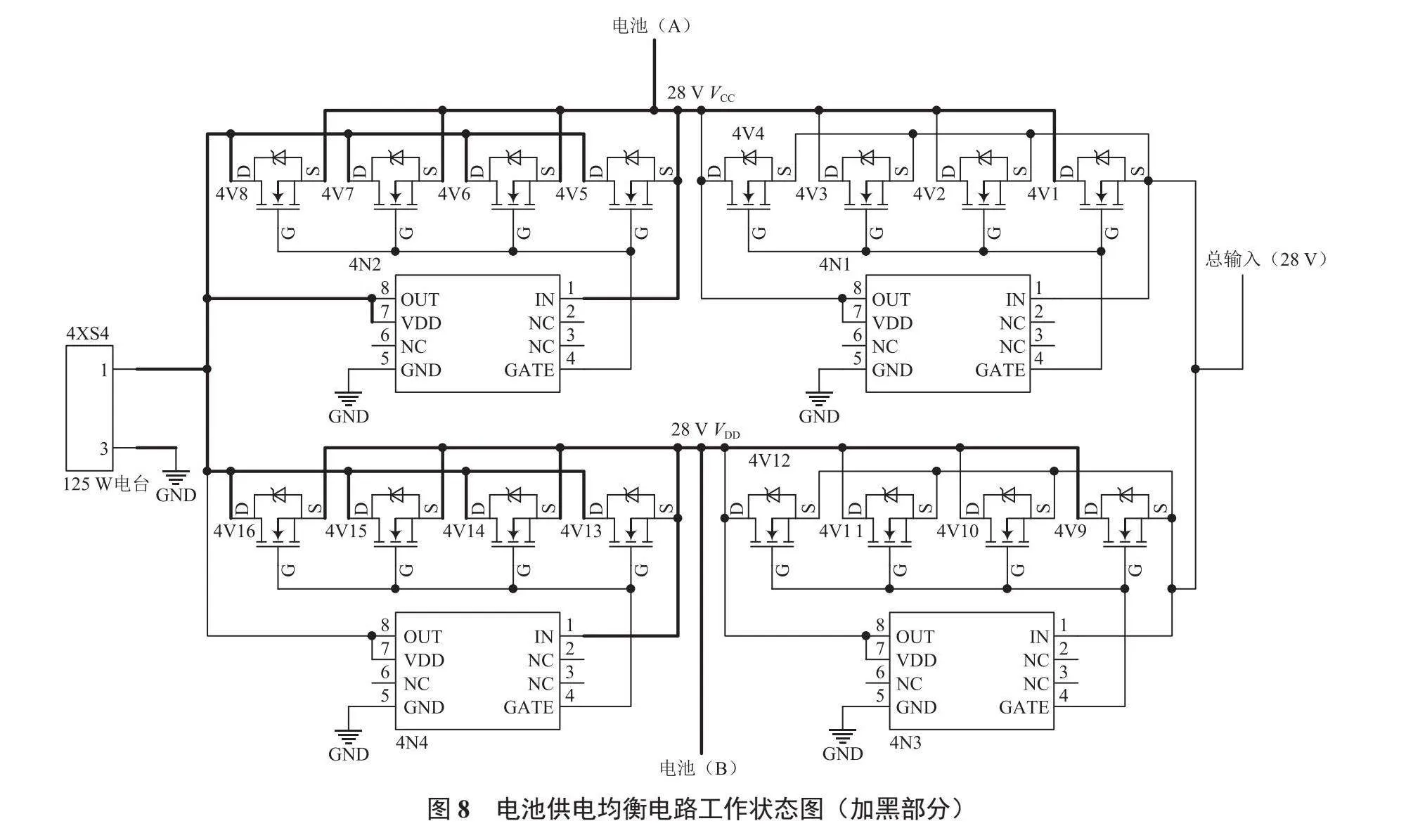
通過4B3電流霍爾傳感器輸出的總輸入流經NMOS(4V1~4V4,4V9~4V12)體二極管,產生小于-25 mV的壓差,通過NMOS(4V5~4V8,4V13~4V16)體二極管,產生大于+25 mV的壓差,使得LTC4357(4N1,4N3)的GATE產生低電平,NMOS(4V1~4V4,4V9~4V12)斷開,LTC4357(4N2,4N4)的GATE產生高電平,NMOS(4V5~4V8,4V13~4V16)導通,電流流向連接器4XS1,為125 W電臺等車載設備供電[9]。電池供電均衡電路工作狀態如圖8所示。
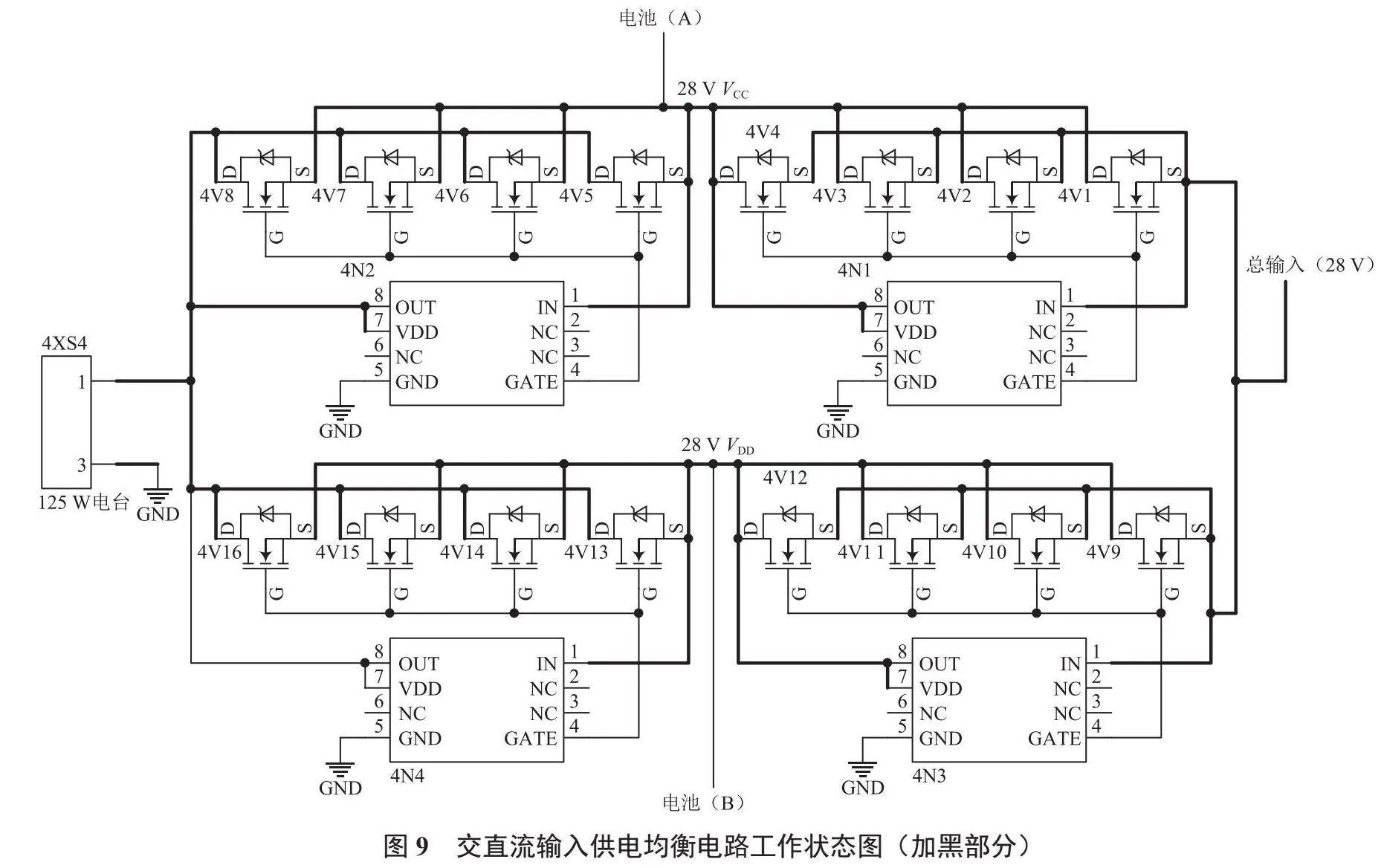
圖9為交直流輸入供電均衡電路工作狀態圖,此時斷開電池連接,通過4B3電流霍爾傳感器輸出的總輸入流經NMOS(4V1~4V16)體二極管,產生大于+25 mV的壓差,使得LTC4357(4N1~4N4)的GATE產生高電平,NMOS(4V1~4V16)導通,電流流向連接器4XS1,為125 W電臺等車載設備供電[10]。
2.3 電流采樣A/B電路設計
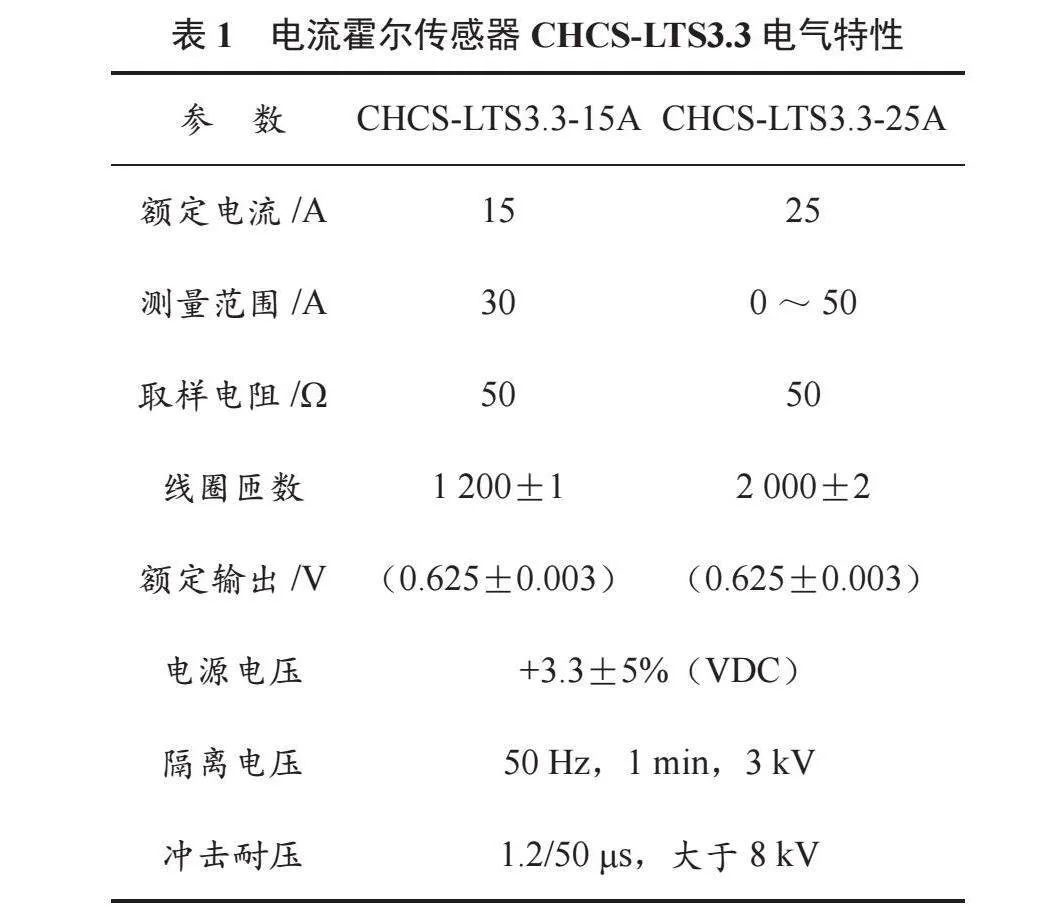
圖10為電流采樣電路(A),由圖6中充/供電均衡電路的輸出作為電流采樣電路(A)的輸入,4B1和4B2均為中霍電流傳感器CHCS-LTS3.3-15A,4B3為中霍電流傳感器CHCS-LTS3.3-25A,其電氣特性見表1。4B2對電池A的充放電電流采樣,并通過A1傳送至微機。輸出濾波電解電容為2 200 μF/35 V(輸出紋波電壓取決于電容的阻抗Zc=ΔV/ΔI,ΔV為紋波電壓,ΔI=2*Imax*η,Imax為輸出最大電流,容值C=ΔI*Ton/Δ)。輸出無極性電容為1 μF,濾除高頻噪聲,輸出濾波電感0.33 μH(L=(Vinmax-Vout)*Vout/(ΔI*Vinmax*f),f為電源模塊開關頻率)[11]。
圖11為電流采樣電路(B),其原理同圖10。
2.4 微機電路設計
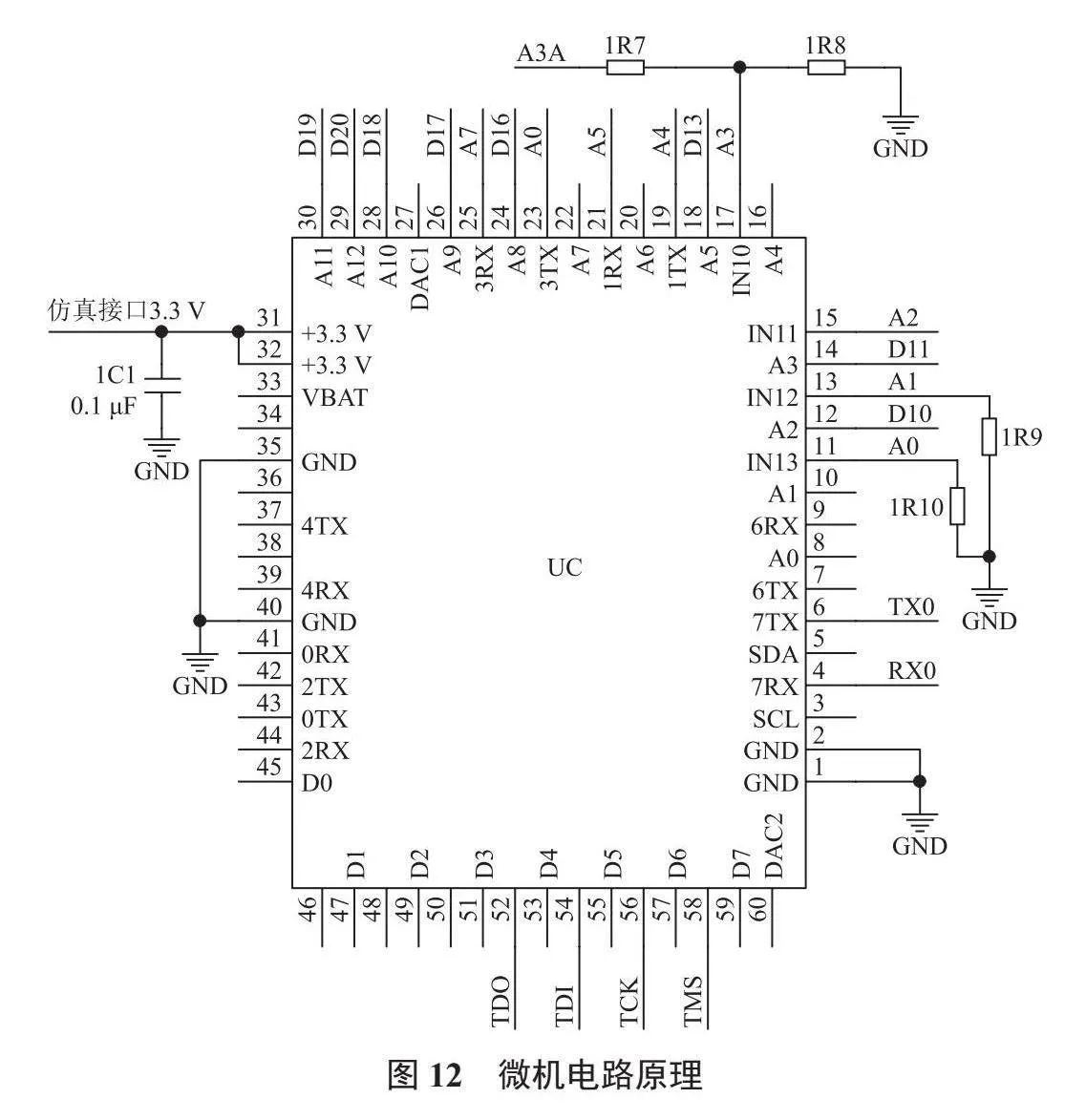
微機采用C8051F020芯片,其引腳定義如圖12所示。當微機檢測到總電流或電池充放電電流異常時,立即智能切斷車載電源輸入[12]。
3 仿真驗證
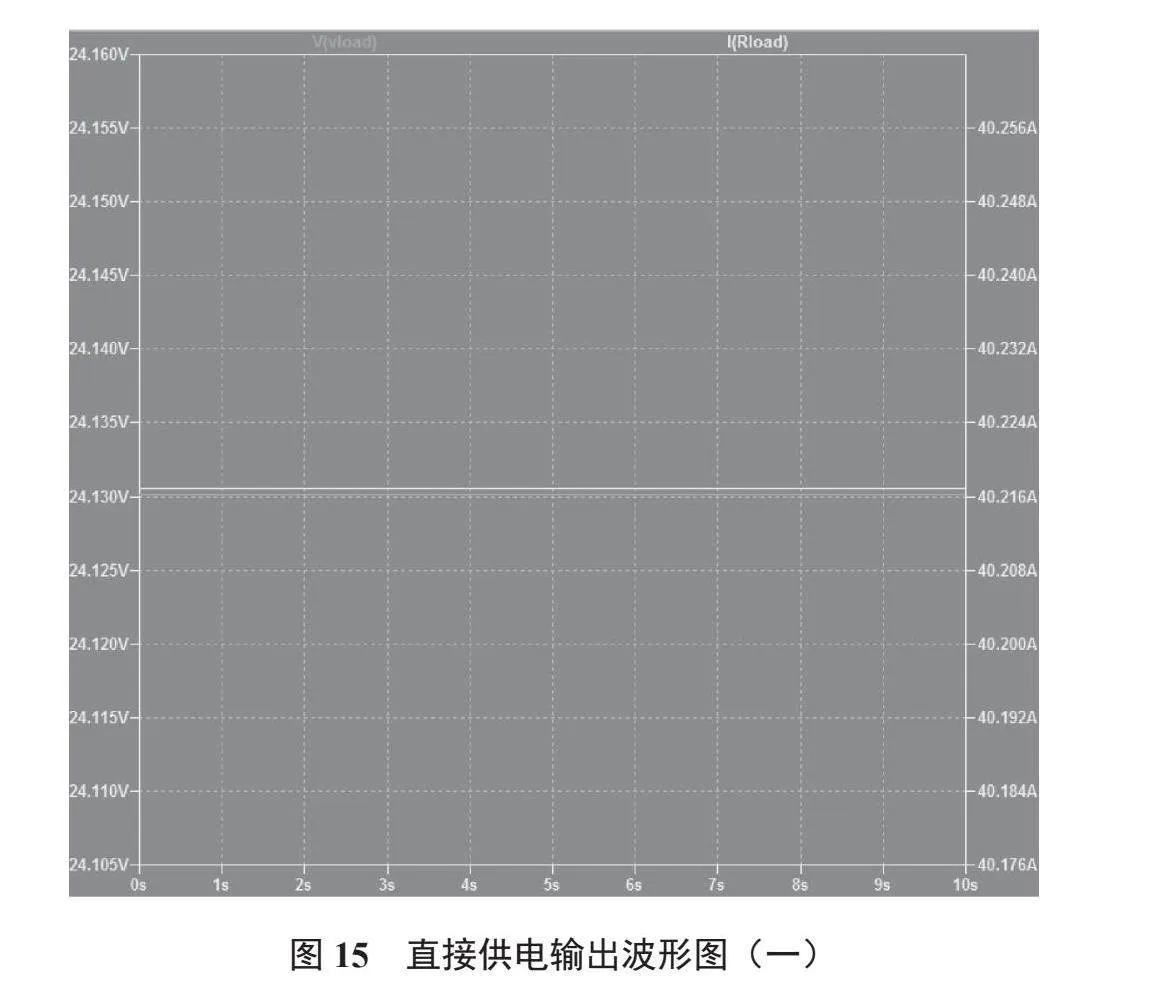
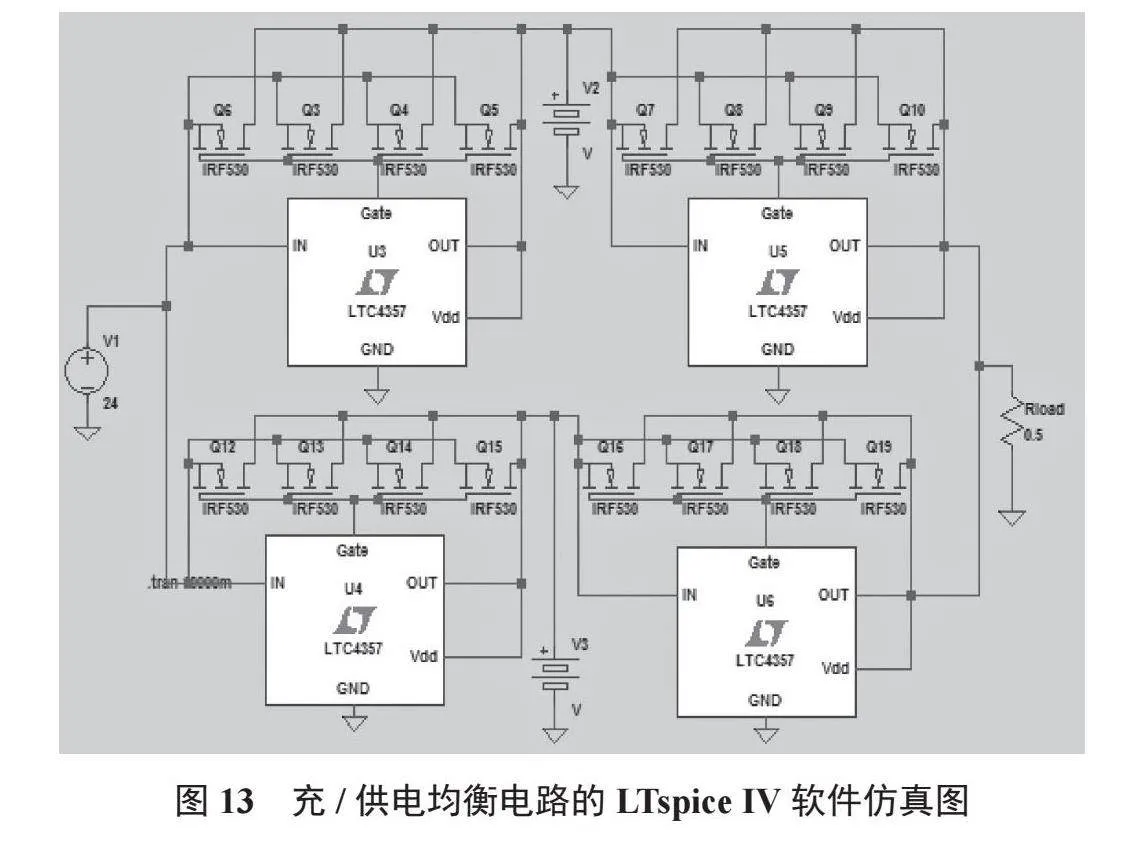
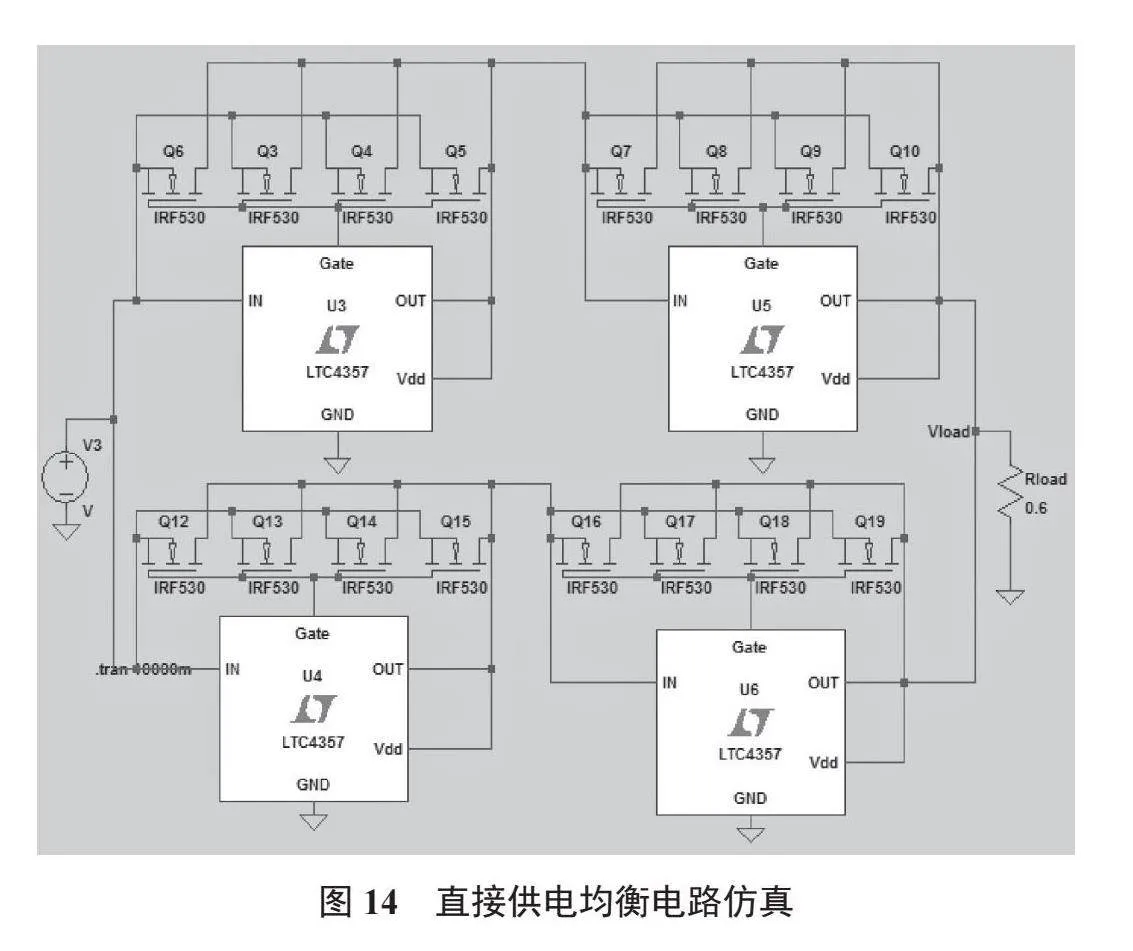
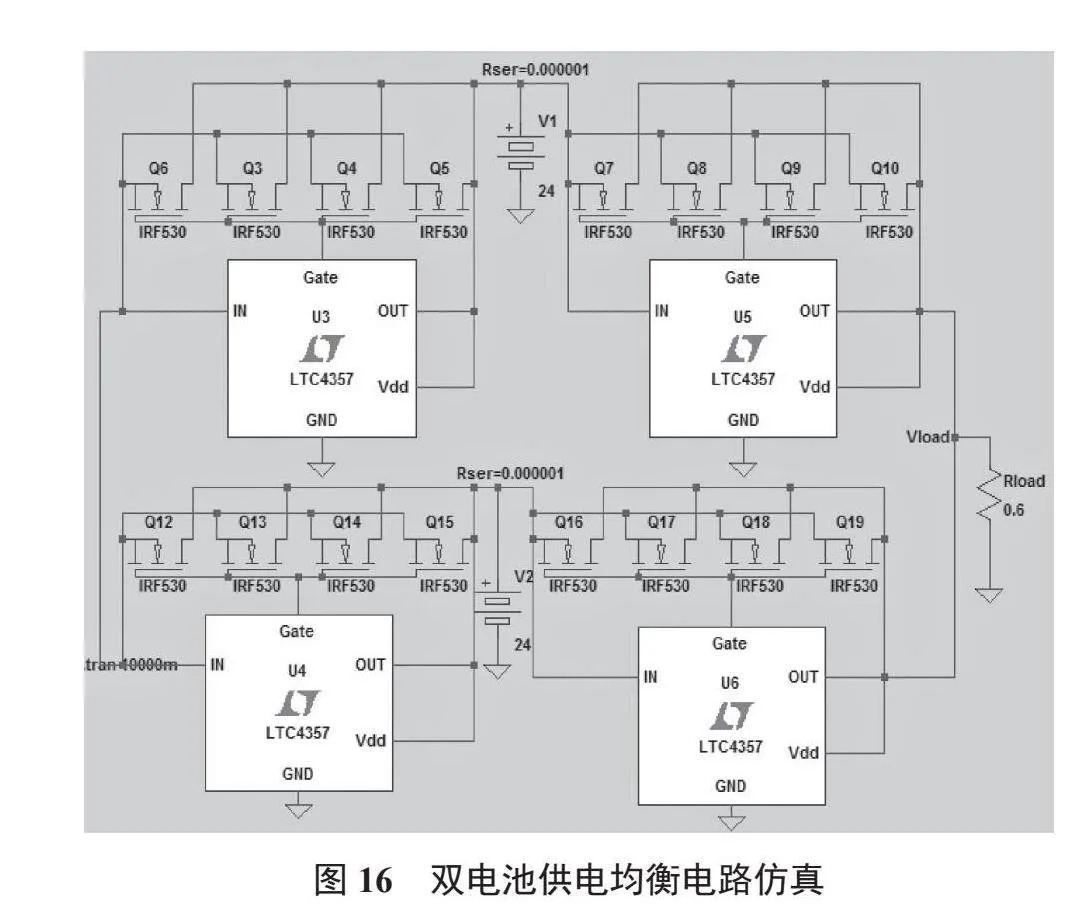
圖13為充/供電均衡電路的LTspice IV軟件仿真,其對應三種工作狀態的波形。直接供電均衡電路仿真輸出波形及雙電池供電均衡電路仿真分別如圖14~圖16所示。
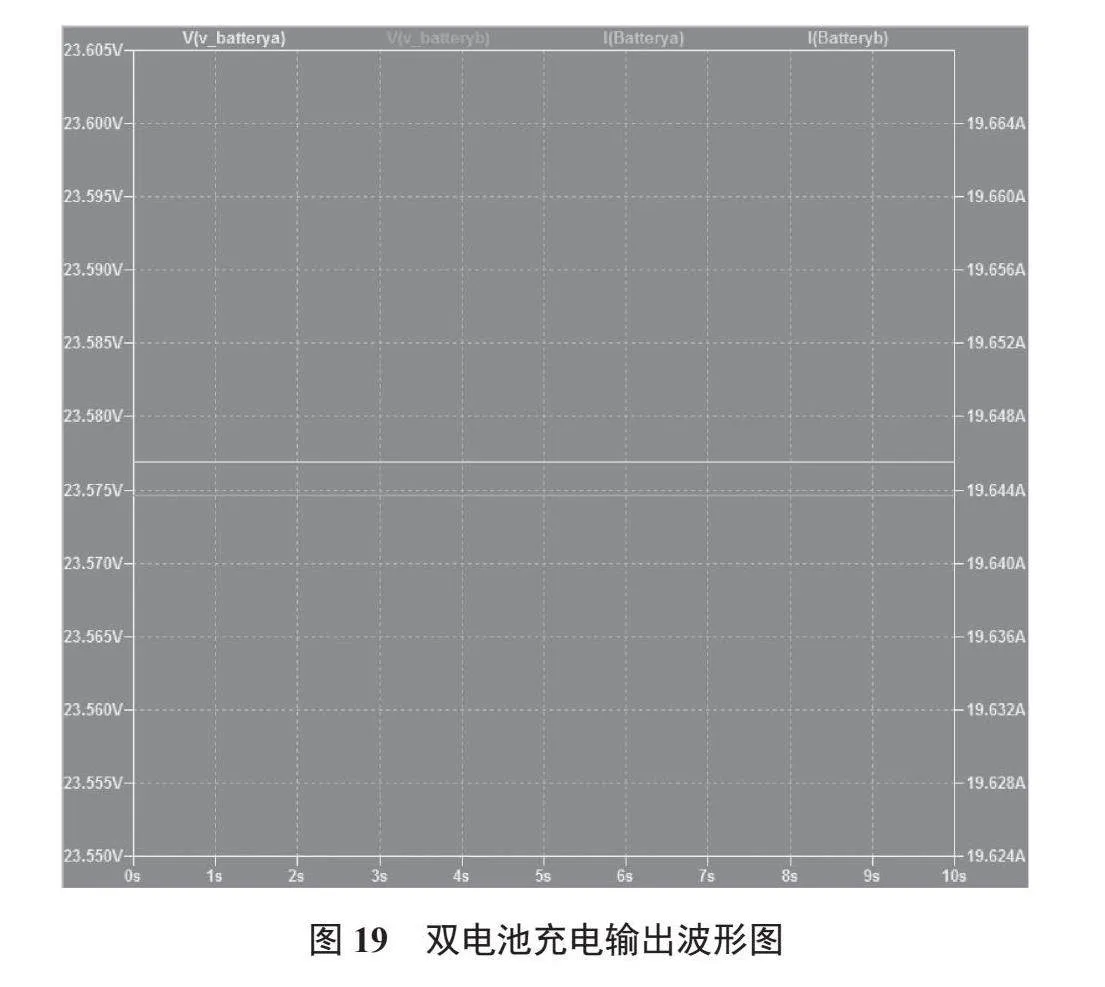
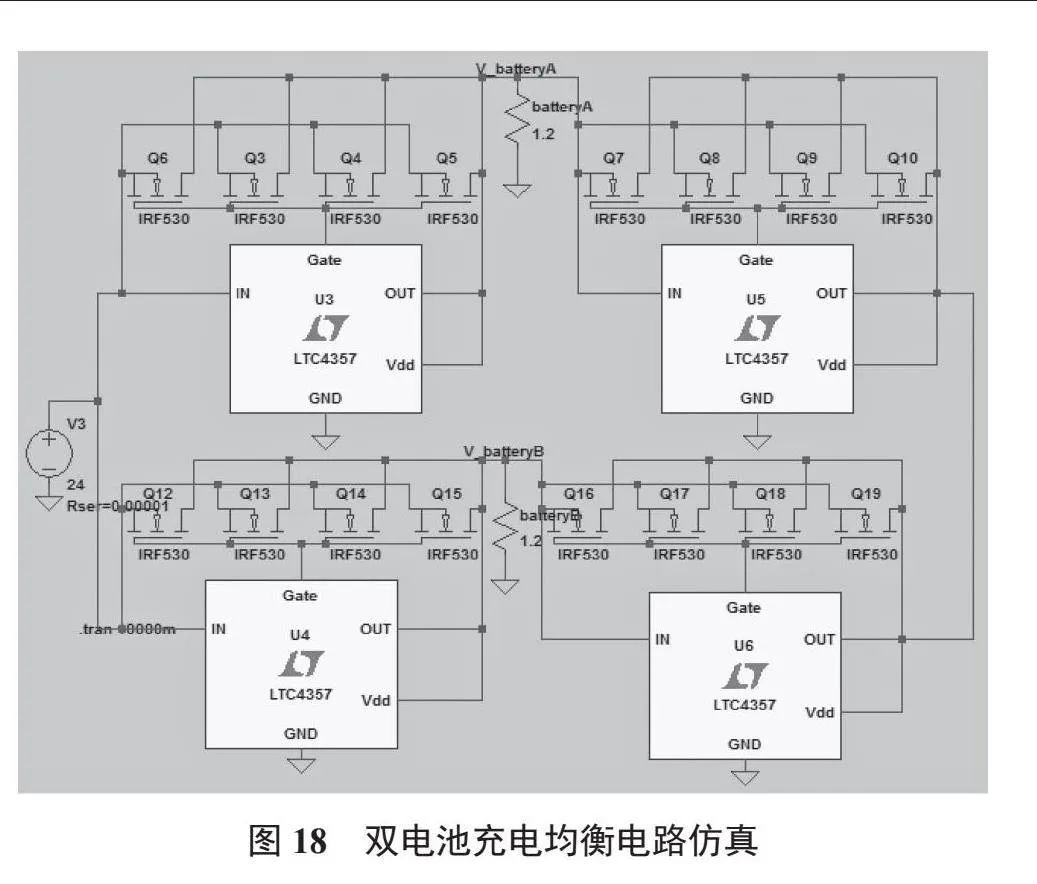
直接供電輸出波形如圖17所示。雙電池充電均衡電路仿真如圖18所示。雙電池充電輸出波形如圖19所示。
車載125 W多功能電源如圖20所示。
4 樣機測試
為了驗證車載125 W多功能電源的雙電池充放電均衡性能,根據雙電池充放電電路的三種工作狀態分別進行測試。第一種工作狀態:雙電池充電,要求輸出連接雙電池,不連接車載電子設備,電池(A)、電池(B)的充電電流互不干擾,實現充電均衡性能。第二種工作狀態:雙電池供電,要求輸出連接雙電池與車載電子設備,電池(A)、電池(B)的供電電流互不干擾,實現電池供電均衡性能[13]。第三種工作狀態:125 W電源直接供電,要求輸出不連接雙電池,連接車載電子設備,通過微機讀取總輸入電流,發現電池(A)、電池(B)的供電電流為零,實現了電源直接供電的均衡性能。通過三種狀態的測試,進一步驗證了車載125 W多功能電源具有雙電池充放電均衡性能[14]。
5 結 語
本文圍繞雙電池充放電均衡電路,首先分析了均衡電路核心器件(LTC4357)的工作原理。該器件通過輸入輸出壓差來決定NMOS的通斷,進而實現均衡電路的電流均衡功能。本文分析了均衡電路拓撲的三種工作狀態,即雙電池充電均衡、雙電池供電均衡、125 W電源直接供電,最后對雙電池充放電均衡電路進行凌特LTspice IV軟件仿真和加電測試,均驗證了一種理想二極管的雙電池充放電電路的均衡性能。
參考文獻
[1]柯樂樂,吳林,宋金華,等.一種用于某電臺的車載多功能電源設計[J].物聯網技術,2023,13(12):95-99.
[2]趙子龍.車載綜合電源控制系統設計[D].西安:西安電子科技大學,2019.
[3]李恒,柴曉冬,徐紀康,等.基于故障樹的軌道交通車載電源可靠性分析[J].計算機測量與控制,2019,27(5):35-38.
[4]吳林,楊國為,劉斌.光伏微型逆變器輔助電源的變壓器設計[J].電子設計工程,2015,23(17):115-117.
[5]宋金華. 單片機在GPS同步信號延時誤差測量中的應用[J].電子技術,1999(5):27-29.
[6]李麗霞,李健.基于單片機的車載電源控制系統設計[J].計算機與網絡,2013,39(22):58-61.
[7]汪貴雄.電動汽車車載電源[D].泉州:華僑大學,2019.
[8]胡振,胡成祥. 基于太陽能與超外差的無線車載應急逃生裝置[J]. 無線電工程,2020,50(12):1082-1086.
[9]宋金華,吳林,謝啟少,等.一種穿戴式系統電源控制器設計與實現[J].電子技術應用,2019,45(12):115-120.
[10]吳林,宋金華,謝啟少,等.一種機載電壓浪涌發生器的設計與實現[J].計算機測量與控制,2020,28(4):271-275.
[11]宋金華,陳華強,吳林,等. 16路智能鋰電池充電、維護儀設
計[J].計算機測量與控制,2019,27(10):280-284.
[12]孫軍民.基于車載供電的高壓電源的實現[D].蘭州:蘭州交通大學,2020.
[13]夏夢雷,張德磊,陳峰雷,等.新型車載電源系統的優化設計[J]. 電氣技術,2020,21(10):50-53.
[14]王文軍,郭玉峰,林旭光,等.用于軌道交通車載電源性能自動化評測系統 [J].吉林大學學報(信息科學版),2019,37(6):677-681.
