輪足式導盲機器人設計
2025-02-23 00:00:00梅韜鐘榮林邢春曉
物聯網技術 2025年4期
關鍵詞:結構設計
摘 要:隨著全球視力障礙問題日益凸顯,視障人士的出行問題受到廣泛關注。現行的傳統導盲輔具已經不能滿足盲人獨立出行的需求,而新興的智能導盲輔具存在適用場景有限等問題,基于此設計了一種輪足式導盲機器人。首先分析了犬類骨骼特性,然后以此為基礎設計了整體結構。提出輪足混合式導盲機器人的硬件設計架構,將硬件系統細分為運動系統、感知系統和人機交互系統,其中運動系統負責機器人的移動和姿態調整,感知系統旨在全面收集機器人所處環境的信息,人機交互系統負責與視障人士交互。該設計為視障人士出行提供了便利,對推進導盲設備的智能化具有重要借鑒意義。
關鍵詞:輪足式;導盲機器人;結構設計;運動系統;感知系統;人機交互
中圖分類號:TP23 文獻標識碼:A 文章編號:2095-1302(2025)04-00-03
0 引 言
全球視力受損人群已高達22億[1-2],其中中國視障人士占比18%~20%。全球視力障礙問題日益凸顯,亟需人們關注并解決。目前視障人士出行依靠盲道感知前進方向,但是現行的盲道通常出現規劃鋪設不合理以及管理不善等問題,使得難以有效發揮其應有的作用[3]。導盲犬雖然能提供更多的指導和安全感,但因其高昂的培養成本、較長的訓練周期、有限的數量以及工作壽命短等原因導致其難以被廣泛采用[4]。為了解決這一問題,智能導盲輔具如智能導盲杖、穿戴式導盲設備、移動式導盲機器人應運而生,這類輔具能基于傳感器與人工智能技術提供更準確的環境信息和導航服務[5-8]。然而,它們通常面臨成本高、技術復雜、適用場景有限等問題,限制了它們的普及。
本文仿犬類骨骼特性設計了一種輪足式導盲機器人,該導盲機器人將輪式機器人的行進效率與足式機器人的地形適應性結合起來,增強了其對環境的適應能力與行進效率。
在硬件架構上,該機器人采用樹莓派4B為下位機控制中心,Jetson Nano為上位機控制中心,將硬件設計分為運動系統、感知系統與人機交互系統三部分。
1 輪足式導盲機器人結構設計
1.1 犬類骨骼特性分析
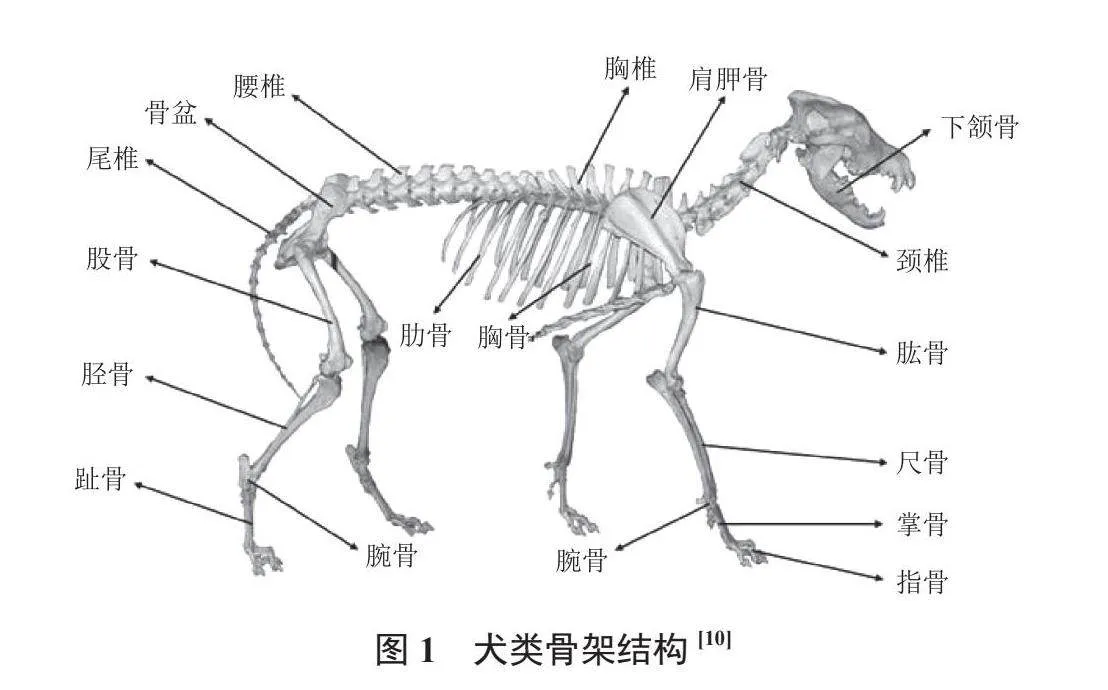
自然界的生物具有最優的結構參數,模仿動物的運動特征一直是國內外研究者探尋的方向[9]。犬類動物具有身體靈敏、地形適應能力強等優點,因此選擇犬類為仿生樣本進行結構設計。圖1為生物犬的骨架結構,全身骨骼約為257~264塊[10],這一復雜的骨骼結構不僅為犬類提供了必要的支撐和保護,而且還在運動和地形適應方面發揮了關鍵作用。犬類具有13對肋骨,其中前7對直接與胸骨相連,形成了堅固的胸廓,為心肺等內臟器官提供了良好的保護[11];其前肢和后肢通過關節和骨骼連接,使得它們能夠實現多樣化的運動模式,如奔跑、跳躍、爬行等。
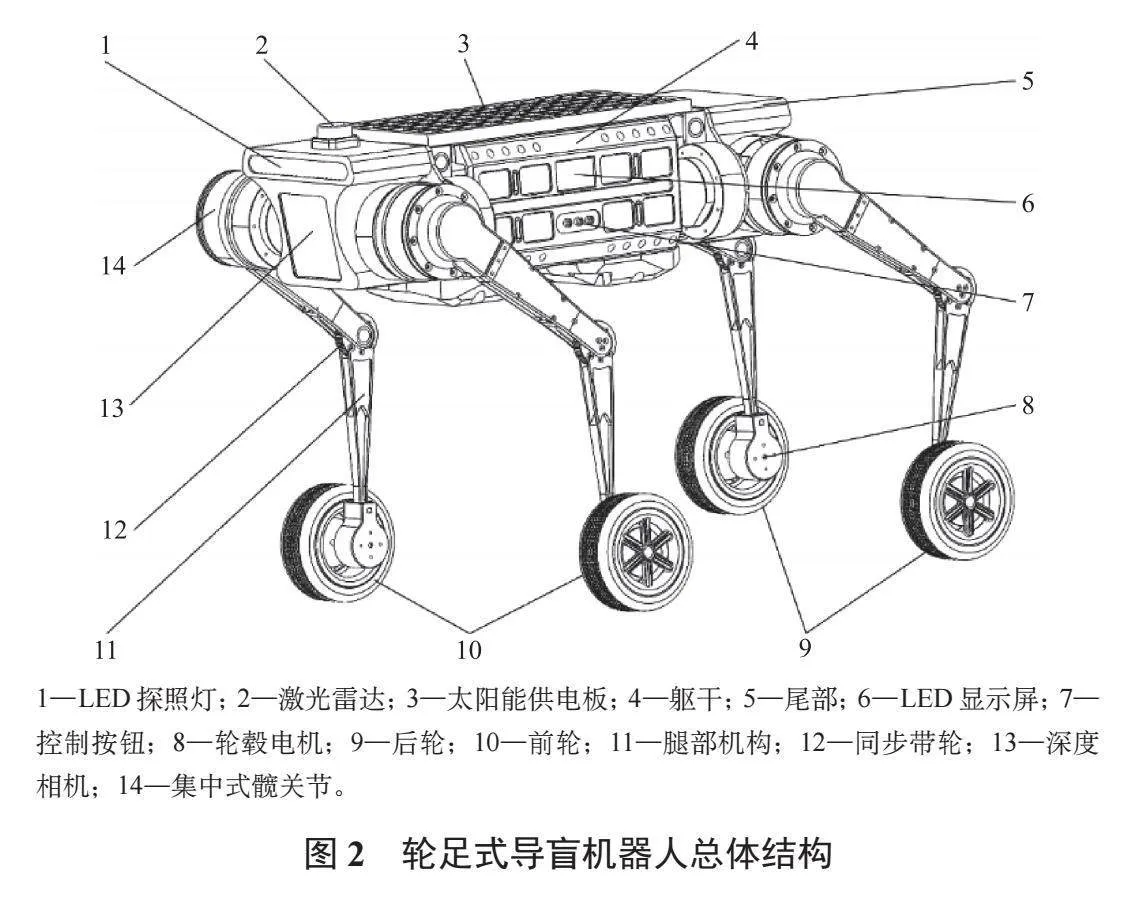
1.2 整體結構設計
輪足式導盲機器人的總體結構如圖2所示,包括頭部、前輪、腿部機構、軀干和尾部等。軀干骨架仿照犬類骨骼結構,采用碳纖維管與三通組合而成,保證了內部模塊的穩定性與功能性;軀干上的太陽能供電板用于為機器人提供電力,使其在戶外或無法接入外部電源的環境中仍然能夠持續工作;軀干側面裝有LED顯示屏與控制按鈕,其中控制按鈕從左至右分別為電源開關、藍牙連接開關與太陽能供電板運行開關;頭部裝有雙目結構光深度相機、激光雷達與LED探照燈,使得機器人在增強了其感知能力和環境適應性的同時,提升了其在各種環境中的導盲效率和安全性;尾部配備柔性繩與力傳感器,通過調整繩子緊繃度來控制其與障礙物間的距離,力傳感器能夠使機器人根據監測數據適時調整動作和路徑,更好地滿足視障人士的行動需求。
2 輪足式導盲機器人硬件設計
輪足式導盲機器人采用樹莓派4B與NVIDIA Jetson Nano作為主要控制芯片,其中樹莓派4B為下位機控制中心,Jetson Nano為上位機控制中心。樹莓派4B作為機器人的“小腦”,專注于實時底層控制和傳感器數據采集;Jetson Nano作為機器人的“大腦”,主要負責高級計算、圖像處理、機器學習等任務。
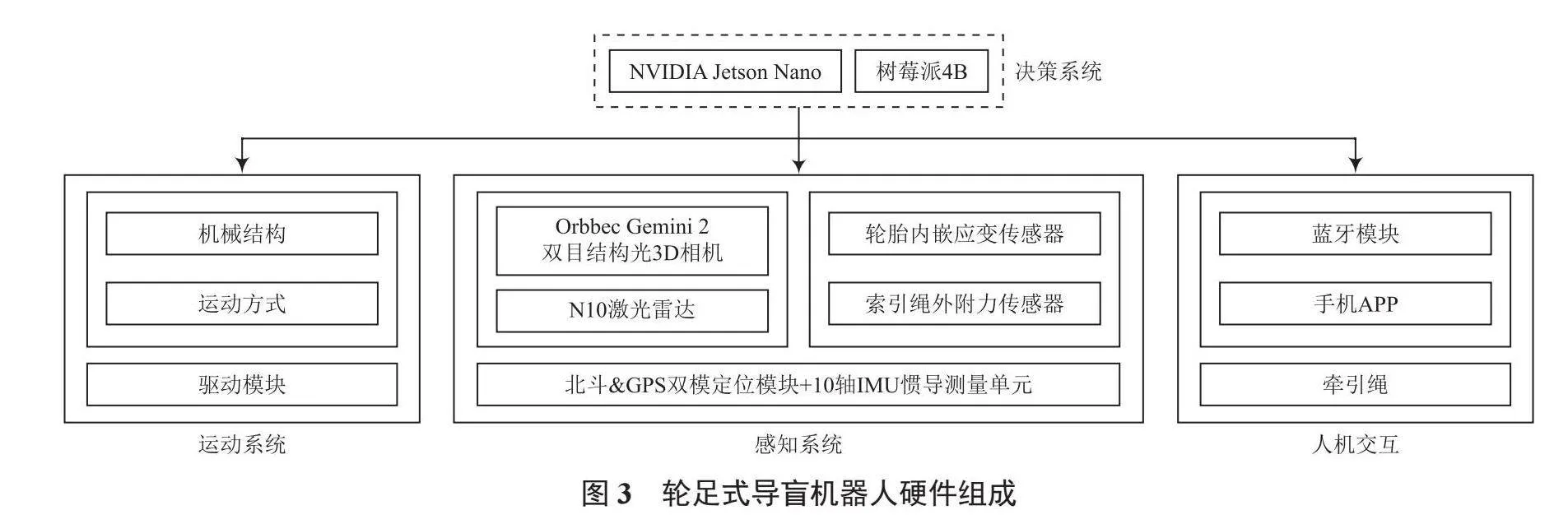
輪足式導盲機器人硬件設計包括運動系統、感知系統與人機交互系統,如圖3所示。
2.1 運動系統
運動系統是輪足式導盲機器人的基礎,負責機器人的移動和姿態調整,包括腿部機構與驅動模塊。
2.1.1 腿部機構
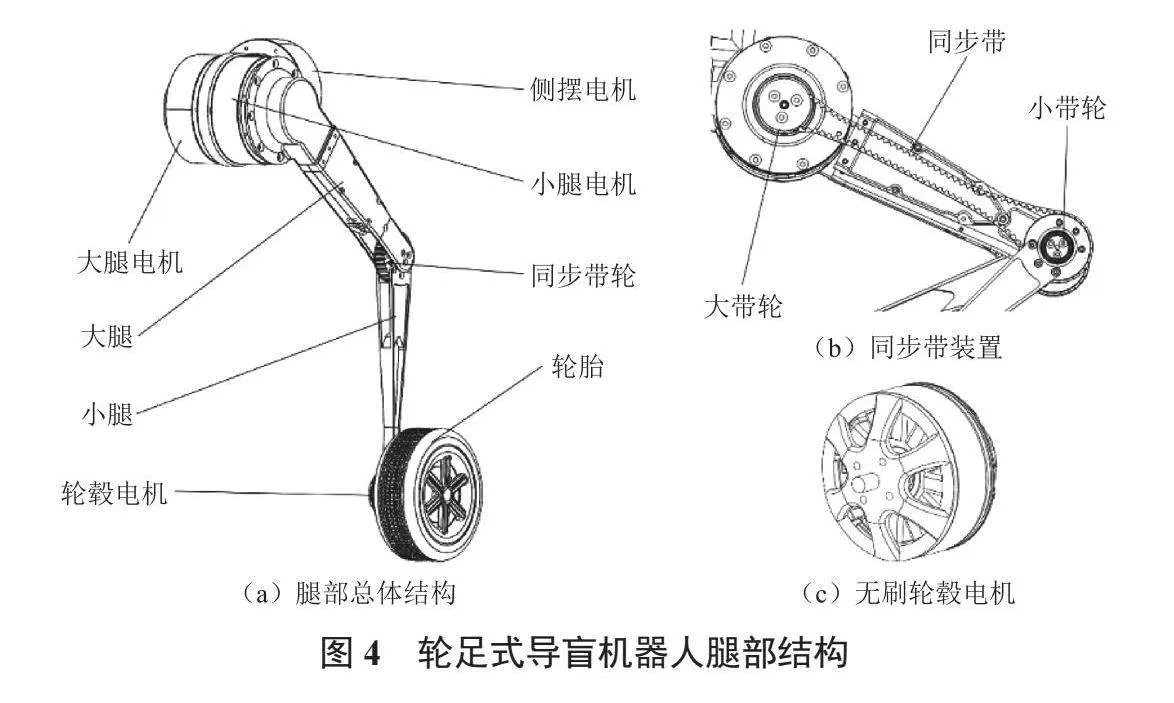
如圖4所示,輪足式導盲機器人的腿部機構由髖關節、大腿、膝關節、小腿與輪胎組成,所有關節舵機都集中在髖關節處。機器人腿部關節包括機器人本體上安裝的側擺電機,與側擺電機連接的大腿電機以及小腿電機,小腿電機的一側連接有大腿外殼。通過同步帶和帶輪的齒形配合,保持帶輪和同步帶的同步旋轉,從而實現由小腿電機到膝關節的動力傳遞。踝關節被輪胎所取代,無刷輪轂電機直接為輪胎提供動力;此外,輪胎內胎面安裝了應變傳感器,能夠實時監測輪胎與地面之間的接觸情況,提供地面硬度、壓力分布及輪胎負載等關鍵信息,使機器人在不同的地形中都能表現出最優性能。
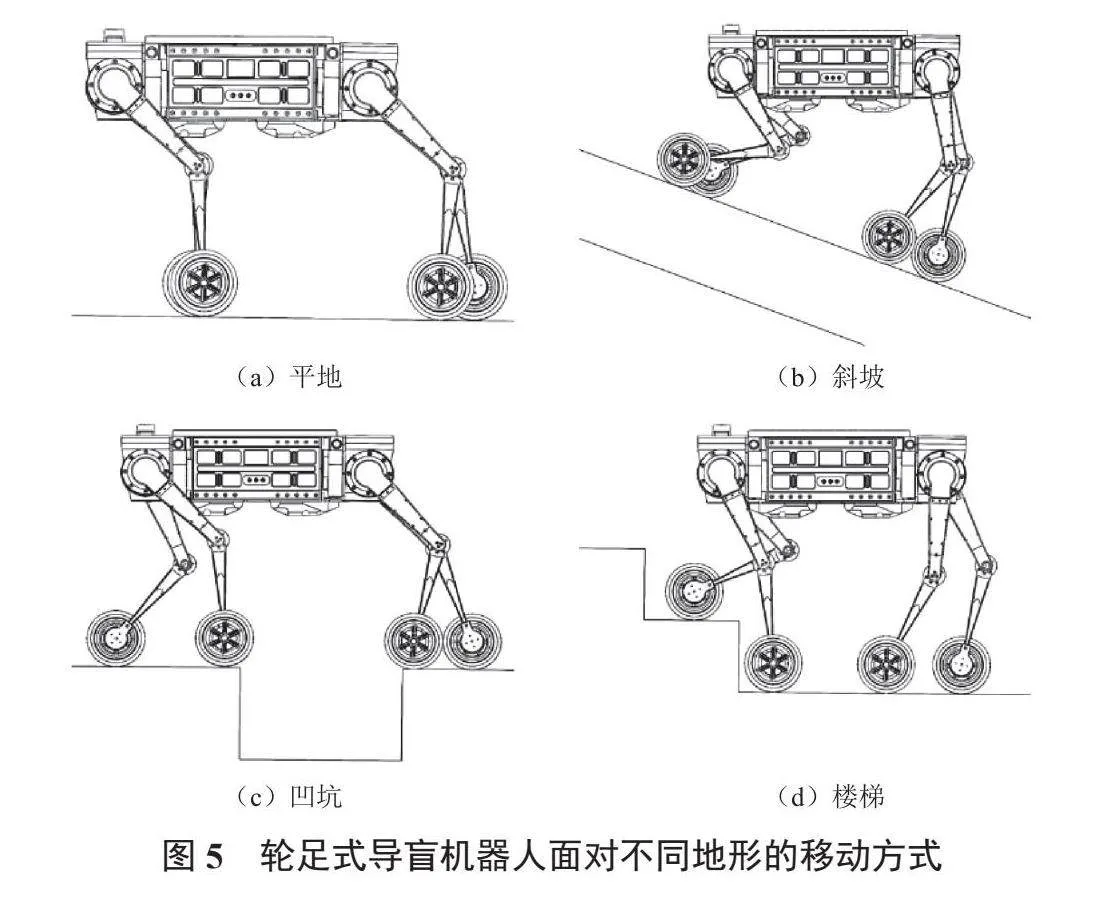
由于該機器人的踝關節被替換為輪胎,這種在足端添加輪式驅動機構的輪足結合方式使得輪足式導盲機器人實現了足式和輪式兩種移動方式的靈活切換。如圖5所示,在平地或斜坡上,機器人主要采用輪式移動進行導盲工作;而在面對凹坑、樓梯等障礙時,則主要采用足式移動。同時機器人可以通過差速驅動的方式轉向以增強其靈活性。
2.1.2 驅動模塊
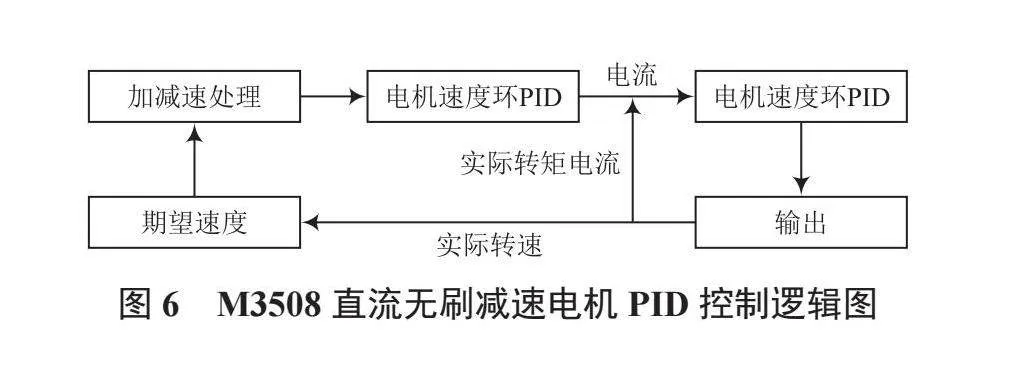
輪足式導盲機器人的關節驅動模塊采用GO-M8010-6永磁同步電機和M3508直流無刷減速電機。在面對平地或斜坡等較為平坦的地形時,M3508直流無刷減速電機作為輪轂電機發揮作用。如圖6所示,在輸入期望速度后,電機將根據實際轉速實時進行加減速處理,并執行PID(Proportional-Integral-Derivative)計算。隨后將輸出速度與期望速度進行比較,并進行偏差調整,以確保電機的運行效率和準確性。而在面對凹坑、樓梯等障礙地形時,作為關節電機的GO-M8010-6永磁同步電機則開始發揮作用,其采用的矢量控制(FOC)方式實現了對電機的精細控制,當減速比為6.33時,最大扭矩可達23.7 N·m、最大速度為30 rad/s,確保了機器人在面對這類障礙地形時運行的穩定性和安全性。
2.2 感知系統
感知系統作為機器人的“感官”,旨在全面收集機器人所處環境的信息。該系統由視覺與雷達避障系統、觸覺感知系統以及慣性導航系統組成。
2.2.1 視覺與雷達避障系統
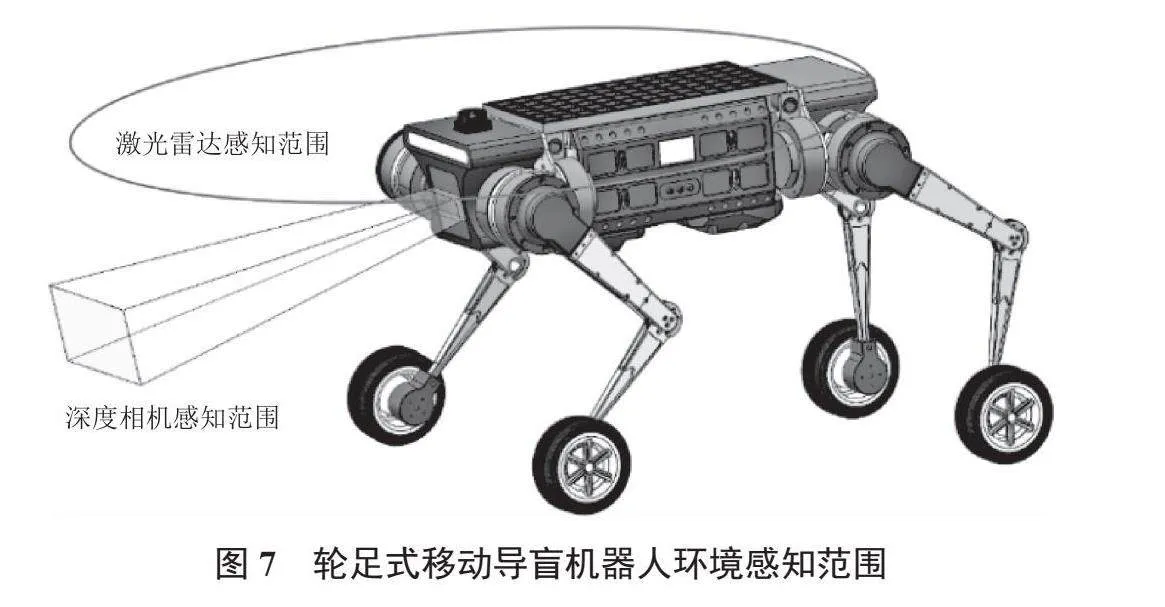
視覺與雷達避障系統通過深度相機和激光雷達協同工作,實現對周圍環境的全方位感知和對障礙物的精確檢測,如圖7所示。深度相機采用Orbbec Gemini 2雙目相機,可實現10 m范圍內的深度測量,在導盲作業過程中用于障礙物檢測、環境感知和為導航系統提供視覺信息。激光雷達采用N10P型號,可實現最大有效距離25 m、水平360°環境下的全方位探測,在行進過程中主要用于創建二維地圖、自動定位和提供障礙物的空間信息,為路徑規劃提供精確數據。
2.2.2 觸覺感知系統
觸覺感知系統通過分析導盲機器人足部輪胎與地面的接觸形變以及視障用戶與牽引繩之間的拉力,實時調整機器人的速度以適應用戶的行走節奏。輪胎內裝有應變傳感器,當輪胎與地面接觸發生形變時,傳感器實時反饋形變信息,結合輪胎理論模型進行狀態估算;柔性繩配備力傳感器,用于檢測視障用戶對牽引繩的拉力,實時調整機器人輪轂電機期望速度,以匹配盲人的行走速度。
2.2.3 慣性導航系統
慣性導航系統由慣性測量單元(IMU)和定位模塊構成。WHEELTEC N200WP是一款高性能十軸IMU,集成加速度計、陀螺儀、磁力計等傳感器,能夠實現高精度的線性加速度、角速度和磁場強度監測。靜態條件下,俯仰和橫滾精度達0.05 RMS,動態條件下為0.1 RMS,確保了機器人穩定、可靠的運動控制與環境感知。定位模塊采用BDS/GNSS技術,定位精度高達2.5 m,跟蹤靈敏度為-162 dBm,可與慣導模塊無縫集成,提供高精度定位導航。
2.3 人機交互系統
人機交互系統是輪足式移動導盲機器人的“手”與“嘴巴”,負責與視障用戶進行交互,它包括充當“手”的柔性繩與充當“嘴巴”的語音模塊。語音模塊通過藍牙與用戶的智能手機連接,利用決策系統傳遞指令,指導手機向用戶播報信息,從而引導用戶進行相應動作。柔性繩通過觸覺為用戶提供物理導向,而語音模塊則通過聽覺提供指引。選用的HC-05藍牙模塊能夠接收來自決策系統的實時命令,并據此調節智能手機的播報內容。例如,當機器人偵測到前方存在障礙時,決策系統便會向HC-05模塊發送指令,該模塊隨即將此指令傳送至智能手機,使其播放警告音,以提醒用戶避讓障礙物。
3 結 語
為了應對視力障礙人士在出行時面臨的各種挑戰,本文設計了一種輪足式導盲機器人。該設計融合了輪式機器人高速穩定的行進狀態與足式機器人面對復雜地形的強大適應能力,經實地驗證,該機器人性能穩定,反應靈敏,為盲人出行提供了極大便利。
注:本文通訊作者為邢春曉。
參考文獻
[1]張云,陳尚,屈克非.基于MSP430的智慧導盲小車設計[J].電子制作,2024,32(1):87-89.
[2]潘虹,黨小娟,陳江萍.基于物聯網技術的智能導盲系統設計[J].物聯網技術,2024,14(2):90-92.
[3]陳迪,李雯,駱莉玲,等.關于盲道使用現狀及其存在問題的研究—基于上海市浦東新區的調查與分析[J].時代金融,2020(8):123-124.
[4]汪冰倩.導盲犬為何發展難[J].中國工作犬業,2023(5):13-14.
[5]徐誼涵,賈瓊瓊,鐘有朋,等.現代盲人出行產品市場與可行性研究綜述[J].現代商貿工業,2019,40(21):76-77.
[6]董辰辰,王浩源,冉清華.導盲輔具的研究與發展趨勢[J].電聲技術,2019,43(7):74-76.
[7]余娜娜.面向視障人群的導盲輔具設計研究[D].廣州:廣東工業大學,2022.
[8]武曌晗,榮學文,范永.導盲機器人研究現狀綜述[J].計算機工程與應用,2020,56(14):1-13.
[9]李鵬飛.四足機器人結構設計與運動學仿真分析[D].昆明:昆明理工大學,2019.
[10]陳久朋.四足機器人步態及運動控制研究[D].昆明:昆明理工大學,2021.
[11] MILLER M E, CHRISTENSEN G C, EVANS H E. Anatomy of the dog [J]. Academic medicine, 1965, 40(4): 400.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
