聚焦復雜工程問題的智能機器人實踐教學體系建設與實踐
2025-03-04 00:00:00白一鳴鄭凱牛小兵柳麗川
物聯網技術 2025年5期
摘 要:聚焦復雜工程問題,以各類大學生智能機器人比賽為指引,針對機器人智能感知與運動控制兩個方向的內容及特點,整合實驗室資源,將相關主干課程的知識點“串”起來,建立了較為完整的智能機器人實踐教學體系。通過建設智能機器人實踐教學體系,在培養了學生專業素養的同時,提高了學生在實際應用中解決復雜工程問題能力。
關鍵詞:工程實踐;智能機器人;實驗室建設;創新競賽;工程認證;實踐教學體系
中圖分類號:TP249 文獻標識碼:A 文章編號:2095-1302(2025)05-0-04
0 引 言
智能機器人作為一個極具代表性的系統工程控制對象,融合了電氣設計、控制理論、通信工程、系統架構等多個現代工程學科。從實踐教學的角度,智能機器人深度融合了電氣自動化專業的基礎知識,形成了一套專屬智能機器人的交叉學科體系。作為實踐教學的載體,智能機器人又是一個將傳感檢測、片上處理器、軟件設計、智能控制算法、非線性控制理論等融合在一起的復雜光機電集成系統[1],它是復雜工程問題的一個濃縮實體。
目前,工程教育專業認證是確保工程教育質量的一項重要制度,它作為實現工程師資格國際互認的重要途徑之一,在國際上得到了廣泛認可[2-3]。工程教育專業認證以促進我國工程教育教學體系高質量發展為核心,以提升高校工程教育質量水平為目標,為我國培養了眾多國際級別高級工程師。2019年11月大連海事大學測控技術與儀器專業通過了中國工程教育專業認證,并于2022年6月順利通過中期審核。但在評審過程中,評委指出畢業生應達到具有“解決復雜工程問題”能力的要求,為實現這一目標,仍需加強實踐教學體系的建設。其中,“復雜工程問題”指的是具有復雜性的工程問題,而非復雜工程本身的問題。
智能機器人是理想的綜合性、創新性實踐教學載體,建立智能機器人實踐教學體系有利于推動實踐教學高質量發展。因此,本文聚焦復雜工程問題,以智能機器人作為實踐教學載體,突出實驗主體作用,提高實踐教學效果,注重開設綜合性、設計性和創新性的實驗項目,其目標是提升畢業生解決復雜工程問題的能力。
1 智能機器人實踐教學現狀
針對工程認證的要求,各大高校的智能機器人相關專業正積極進行教學改革。以實際項目中對工程師的職業要求為引導,提升學生在求職中的核心競爭力,重視綜合實踐教學環節,設置小學期,大幅增加課程設計環節的學時,也帶來了相應的問題,在各類機器人相關課程的數量并未減少的前提下,僅減少了理論課的授課學時,這樣很容易導致理論與實踐脫節,出現快餐式、觀光式實踐教學的問題,學生們學過的知識很多,但會應用的卻很少,或是學到的課程知識不是系統性的,“見木不見林” 的現象時有發生[4]。這就要求教師充分利用好實踐教學環節,設置綜合性較強的實踐教學項目,幫助學生把各門主干課的專業知識串聯起來。
2 聚焦復雜工程問題的智能機器人實踐教學體系構建
2.1 實踐教學體系建設的總體思路
針對復雜工程問題的特點,大連海事大學智能機器人實踐教學體系建設的主攻方向為智能感知與機器人運動控制兩個專業特色方向。其中,智能感知方向旨在培養學生對智能機器人傳感器和多傳感器信息融合等技術的實際應用能力。機器人運動控制方向注重培養學生的控制算法設計和實現能力,不僅涵蓋經典的PID控制方法,還會深入探索神經網絡、機器學習、路徑規劃、決策樹等先進智能算法的應用,使機器人能夠通過語義識別和圖像識別,做出相應的運動控制決策。
機器人智能感知與運動控制方向涵蓋了大量的專業知識,與工程教育專業認證對于復雜工程問題的特征定義相一致,它對于培養學生對知識的整合與挖掘的能力,提高學生的工程實踐素質與價值意識具有重要作用[5]。因此,構建層次遞進的智能機器人運動控制與智能感知實踐教學知識體系,可以幫助學生提高處理實際工程中復雜工程問題的能力,鍛煉學生整體知識結構的實際運用能力,以培養更為突出的應用型人才。
2.2 智能機器人教學在專業基礎實踐中的拓展
“傳感器應用技術”“機器人控制技術”“人工智能與機器學習”“自動檢測技術”“STM32原理與應用”“數據采集與處理技術”“自動控制原理”是大連海事大學自動化相關專業開設的機器人方向主干課程,各課程都設置與理論課相對應的實驗課,但實踐內容相對獨立。由于課程間的橫向開發協同性和縱向研發延展性沒有做到無縫對接,導致實踐教學過程中未充分發掘學生的綜合應用能力和創新能力[6-7],教學效果不盡人意。
為解決各門專業課局部知識結構問題,提高學生應對復雜工程問題的能力,機器人實踐教學體系建設以智能機器人的智能感知與運動控制方向作為切入點,結合機器人相關專業主干課的特點循序漸進地開展相關訓練。在低年級學生的程序語言設計與編程實踐中融入機器人基礎工程訓練,提升學生針對機器人運動控制方向的算法設計與分析能力;在中年級學生的傳感器課程實驗和課程設計中,幫助學生從機器人系統的整體角度來觀察、分析和解決問題,從而與自動控制原理、機器人運動控制技術、微機原理與接口技術等專業知識結合起來;在高年級學生的綜合性課程設計、自主創新設計、理論與技術研究中,將前沿的人工智能與機器學習學科知識與深度學習、圖像處理、機器人自主導航、語音識別[8]、傳感器信息融合、神經網絡、遺傳算法等多方面知識相結合,以培養學生的創新能力。
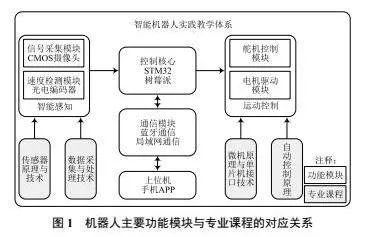
這樣,在專業基礎實踐課的建設中,智能機器人實踐教學體系能夠分層次地貫穿到各年級的專業基礎實驗中,將“自動控制原理”“微機原理與單片機接口技術”“STM32原理與應用”等運動控制的理論知識點引入到“數據采集與處理技術”“傳感器原理與技術”等智能感知的專業基礎實驗課中形成有機整體。機器人主要功能模塊與專業課程的對應關系如圖1所示。
2.3 以智能機器人競賽促進綜合性實踐教學的建設
智能機器人系統是真實智能測控系統的一個濃縮實體。為了實現移動機器人在動態且不確定的環境中自主移動,就需要運用一系列核心技術,包括環境感知、地圖構建、自主定位、運動規劃等[9]。圍繞機器人智能感知與運動控制,構建了一套與生產實踐相結合的實踐性教學體系,以此培養學生將理論知識應用于實際問題的能力,同時提高學生的專業素養和解決復雜工程問題的能力。
當前,各類智能機器人的軟硬件技術日益成熟且豐富多樣[10]。針對全國大學生舉辦的各類智能機器人創新競賽,如中國機器人及人工智能大賽、RoboCup機器人世界杯中國賽、中國機器人大賽、國際水中機器人大賽、RoboMaster機甲大師賽以及Robocom機器人開發者大賽等,在經過十多年的發展后,已經趨于成熟,并在國內眾多高校中產生了廣泛而深遠的影響。參與這些競賽的過程,能夠有效鍛煉學生的獨立思考能力和解決實際問題的能力。
大連海事大學在構建智能機器人實踐教學體系時,充分結合了智能機器人競賽的內容與特點,對機器人比賽的原則和機制進行了提煉與簡化。體系內設計了步進電機驅動、陀螺儀運動檢測等基礎接口,實現了對電機轉速和舵機擺角的精確讀取。同時,將智能機器人系統中的關鍵實驗模塊,如舵機(伺服電機)、直流電機、光電編碼器、CMOS攝像頭等,融入到相關的課程設計中,并建立了多個綜合性強的實踐教學項目,有效地將專業課程實踐教學與科技創新競賽活動緊密結合。
3 智能機器人實踐教學體系的實踐
3.1 軟硬件教學資源的建設
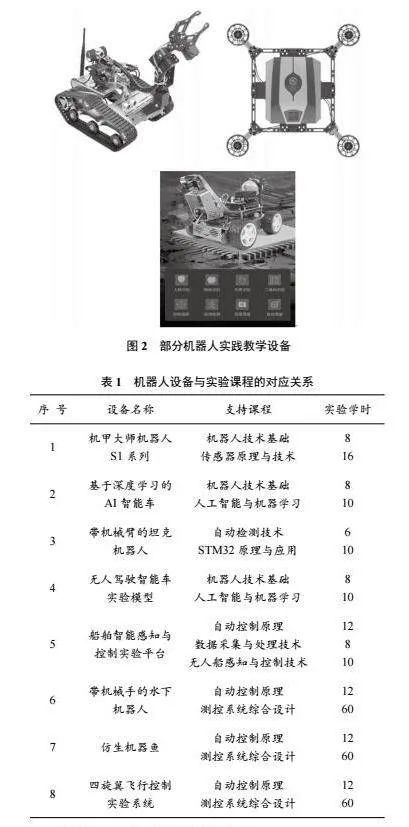
針對智能機器人領域的行業熱點,大連海事大學為機器人與人工智能實驗室配備了全面的數字化軟硬件教學系統。軟件系統主要包括:MATLAB系統模擬仿真軟件、Python及C++等高級編程語言環境、Scratch及Arduino等圖形化及嵌入式編程平臺,以及專門的智能機器人設計系統和一系列模式識別工具箱。硬件系統主要包括:基于英偉達開發平臺的深度學習AI智能車、配備多自由度機械臂的坦克機器人、機甲大師機器人S1系列、無人駕駛智能車實驗模型、專為船舶智能感知與控制設計的實驗平臺、集成機械手的水下機器人、機器仿生魚以及四旋翼無人機控制實驗系統等。部分機器人實踐教學設備如圖2所示。
為了豐富智能機器人類課程的綜合實踐環節,進而提升學生的專業能力和培養開放性思維,智能機器人實驗室搭建了相對完善的專業機器人實驗平臺。該實驗室所開設的機器人相關課程大致可以分為以下四個核心領域:嵌入式軟件系統設計、智能傳感器應用與開發、模式識別與圖像處理技術,以及機器人運動控制技術。實踐課程與機器人實驗設備的對應關系見表1。
3.2 智能機器人實踐教學體系的實施
智能機器人實踐教學體系以智能機器人為載體,貫穿基礎實驗、專業實驗、畢業設計以及創新競賽等多種實踐教學活動。為幫助高、中、低不同年級的學生分階段地融入到智能機器人系統的設計中,各階段的具體機器人實踐教學內容如下:
第一階段:將典型的Arduino輪式機器人、RoboMaster S1機器人作為授課對象,首先讓學生能夠自主完成基本編程,對電機的控制方法有一定了解,在此基礎上,學會簡單機器人系統的組裝、調試方法。最后通過讓機器人跟蹤如矩形、橢圓形等經典軌跡的運動控制課題,讓學生對智能機器人機構原理、編程設計等有初步的認識。
第二階段:學生能夠通過自主設計運動控制邏輯,初步具備整合各類電子器件以及獨立開發智能機器人控制程序的能力。同時,通過學習紅外傳感器、光電編碼器等標準傳感器的相關知識,學生能夠完成機器人跟隨、避障等相關實驗。在此基礎上,他們將深入理解和掌握智能機器人控制系統程序編寫的邏輯,為今后完成更加復雜的功能打下堅實基礎。
第三階段:在前兩個階段的基礎上,學生為了擴展智能機器人的功能,通過更新設計方案、調整試驗環境,并增加傳感器、創新模塊套件及執行機構,以熟練應用各類傳感器來實現多樣化的功能,如語音控制機器人小車等實驗。這一環節旨在讓學生對各種傳感器和執行機構的工作原理及應用方法有更深層次的理解,從而提升學生的實際工程問題解決能力[11]。
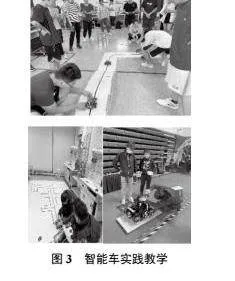
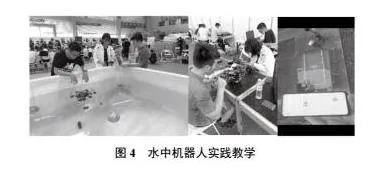
通過參加比賽或研究課題,學生得以自主設計機器人。這一過程不僅培養了學生的創新思維,還鍛煉了他們的實踐能力。在這個階段,學生能夠深入探索并驗證目標識別、路徑規劃、運動控制等處于學科前沿的算法。例如,他們可以參與到無人車自動駕駛、水中機器人自主目標識別與抓取等實踐項目中,通過實際操作來深化理解和應用所學知識。
4 結 語
通過智能機器人實踐教學體系的建設,大連海事大學構建了層次遞進的智能機器人運動控制與智能感知實踐教學知識體系,將工程教育專業認證中“復雜工程問題”的概念具體化。根據智能機器人競賽的內容及特點,對比賽的規則和機理進行了簡化,并改造了相關的機器人實驗設備,以便將其應用于專業課程實驗與綜合課程設計中,幫助高、中、低不同年級的學生有效融入到智能機器人的系統設計中,從而將智能機器人實踐教學體系打造成為一個相對具有開放性的平臺,為學生的發展提供良好的實踐環境,有利于培養學生的創新思維、科研素質以及實踐能力。
參考文獻
[1] 白一鳴,牛小兵,趙永生.面向自動化類專業的智能機器人實驗室建設[J].中國現代教育裝備,2022(17):45-46.
[2] 曹鳳雪,陳艷萍,黃成.非計算機專業C語言課程的教學方法[J].福建電腦,2020,36(1):104-105.
[3] 李欣.面向專業認證的高校工程實踐課程標準化建設探究[J].大學,2020(43):10-12.
[4] 張彥斌,宋磊,邱明,等.面向工程教育專業認證的機器人學課程教學改革與實踐[J].中國現代教育裝備,2017(9):4.
[5] 王威,熊新民,王偉生,等.電類專業集散式教改探索與智能車比賽[J].電子產品世界,2015,22(12):33-36.
[6] 孔英會,戚銀城,項洪印,等.通信工程專業核心課程體系建設的研究與實踐[J].中國電力教育,2012(18):68-69.
[7] 程磊,吳懷宇,熊凌,等.結合智能汽車競賽活動的自動化專業教學改革[J].電氣電子教學學報,2009,31(z2):116-119.
[8] 楊燁陽,鄭健蓉.人工智能與高校思政課程改革的創新融合[J].教育信息化論壇,2021(7):126-128.
[9] 方正,吳成東.自主導航:賦予移動機器人智能感知與運動的能力[J].自動化博覽,2019(8):68-72.
[10] 王喜鴻,董家道,陳敏.“科技理工”之學生科技創新體系的構建——以三亞學院理工學院為例[J].科技視界,2017(9):59-60.
[11] 王旭仁,劉麗珍,黃向陽,等.智能機器人實驗室建設研究[J].計算機教育,2013(19):85-87.