雙足足球機器人守門策略研究
2007-07-05 01:40:06崔櫻楊晶東
智能計算機與應用 2007年3期
關鍵詞:策略
崔 櫻 楊晶東
摘要:首先提出了雙足足球機器人的體系結構。然后給出了基本步態(tài)算法,針對FIRA類人型項目比賽規(guī)則·提出了全新的雙足足球機器人守門策略,最后給出了分析測距試驗數據,驗證了測距準確性和守門策略的合理性。
關鍵詞:守門策略射門策略取足足球機器人
中圖分類號TP242.6文獻標識碼A文章編號:1002-2422(2007)03-0002-03
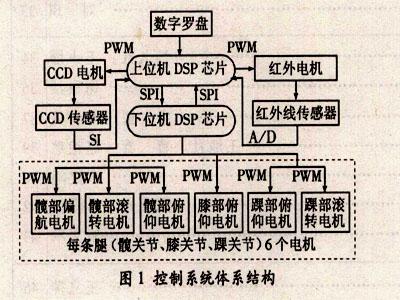
1制體系結構
雙足機器人每條腿共有6個自由度,分別腿部髖關節(jié)(3個)、膝關節(jié)(1個)、踝關節(jié)(2個)。詳細的體系結構如圖1所示。
2基本步態(tài)算法
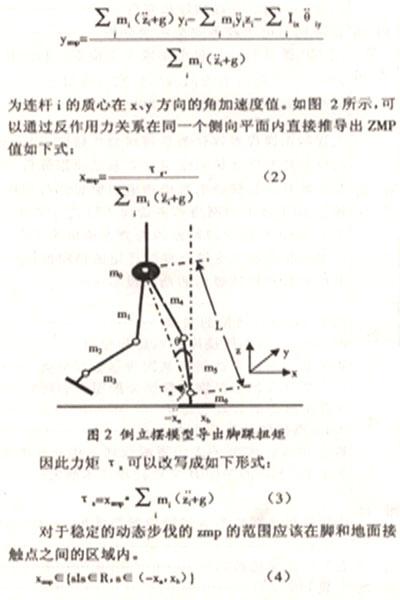
ZMP(zero moment point)是行走地面上的一點,在該點由作用在機器人上的主動力和主動力矩所產生的合力矩水平方向分量為零。基于這種概念可以得出結論:
如果支撐作用的膝關節(jié)保持恒定,我們就可以推導出ZMP在穩(wěn)定區(qū)域內踝關節(jié)的扭矩范圍。此結果是適應于避障行走、快速行走、爬樓梯等動、靜態(tài)步伐,在滿足動態(tài)平衡的情況下最大速度可以達到3cm/s。
3測距策略
哈工大足球機器人測距過程是通過CCD傳感器和頭部伺服電機位置信息融合來實現的。首先通過頭部的俯仰、水平伺服電機轉動來跟蹤目標物體(球),經過找球并且對中到攝像機的視野中央后,頭部的俯仰伺服電機就會對應一個十六進制電機值PWMY。不同的距離處,對應的俯仰電機值會不同,俯仰角度n也不同,這個角度和所測距離Lx就會有一定的函數關系,我們利用幾何三角函數知識可以得到函數關系式。
4守門策略
守門策略是一項容易被忽視的策略,從第四屆FIRA比賽的情況來看,各參賽隊都沒有做這一策略,各隊機器人守門時都選擇原地不動,等待對方射門。其實這種策略是不完備的。其主要原因如下:
(1)由于球門很寬,一旦球被射偏一些,很容易進球得分。
(2)守門員出擊行進的距離要遠小于射門員走的距離,所以守門員完全有時間在射門員射門之前出擊封堵進球路線,增加對方的射門難度。
(3)跟據FIRA比賽規(guī)則,若守門員擋住射門員的射門的成績相當于射門員沒有射進,所以守門策略做的好,同樣會取得比賽勝利。圖4給出了守門員出擊路徑規(guī)劃策略示意圖。
其詳細的守門流程如下:
步驟1:初始化伺服電機、數字羅盤方向角a、視覺通訊端口;
步驟2:按全局分區(qū)標定調色板參數掃描球所在的區(qū)域△ABC;
步驟3:IF RGB∈標定閾值,IF RGB∈左側閾值,t=1,ELSE右側閾值t=2,跳轉步驟4;ELSE重復步驟2。
步驟4:把球對中到視覺視野中央;
步驟5:記錄當前俯仰、水平電機對應的十六進制電機值,測距并計算靜態(tài)橫向移動步數;
步驟6:還原水平電機到初始位置;
步驟7:IF t=1向左側移動,
ELSE
向右側移動:
步驟8:分開雙腿呈V字形守門動作。
5試驗分析
雙足機器人測距過程是通過CCD傳感器和頭部伺服電機的綜合參數測得的,平均誤差率為0.2741。
實驗結果分析:
(1)測距實驗受機器人的所處位置和自身姿態(tài)等因素影響很大,機器人站立位置和姿勢稍有變化都會對測距的準確性有很大影響,所以這一誤差率是正常的。
(2)測距的目的是設定機器人橫行移動步數,如果誤差過大可以在設定步數值時加以修正。加之,測距對其準確性要求不高,只要能保證機器人快速找到球的準確位置并橫向對準球即可。
(3)設定行走步數時一定要有余量,不要越過能夠封堵地方向。
比賽結果證明這一測距過程是能滿足比賽要求的。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛(wèi)生(2016年8期)2016-11-12 13:26:50