汽車試驗中車速信號的測量方法
2010-01-07 11:23:16戴村供
海峽科學 2010年12期
戴村供
?
汽車試驗中車速信號的測量方法
戴村供
福建工程學院機電及自動化工程系
介紹了汽車試驗中常見的幾種車速測量方法,比較了各自的優(yōu)缺點,并對當今較為先進GPS測量車速方法的工作原理做了較詳細的介紹。
車速測量;GPS;第五輪儀
車速信號是汽車制造廠家、科研院所和高校進行汽車性能檢測、道路試驗及科學研究時常測量的重要參數之一。它與車輪力(力矩) 、踏板力、車輪轉速(轉角)等參數相結合,對汽車整車動態(tài)性能的分析、制動系統(tǒng)的性能匹配等有著重要的意義和應用價值[1]。
1 傳統(tǒng)測速方法
目前,在汽車試驗上采用的速度測量系統(tǒng)主要分為第五輪儀和相對式光電編碼器。
第五輪儀有兩種:一種是常規(guī)的接觸式第五輪儀,它的測距傳感器由外周長設定的測量輪(第五輪) 和電脈沖發(fā)生器兩部分組成。測量輪每轉動一個角度,脈沖發(fā)生器就產生一個電脈沖信號,這個角度大小與測量輪的滾動周長相對應,保證測量輪每行駛一定距離(一般為0. 01 m),脈沖發(fā)生器就輸出一個脈沖信號。計算機對這些脈沖進行計算,得到距離值。儀器內部高精度的晶振通過分頻電路得到基本時間脈沖信號,對這些時間脈沖的采樣、計數就是第五輪儀的時基。接觸式第五輪儀給出的速度量是儀器計算系統(tǒng)對上述兩種脈沖同步采樣、計算得到的計算量。如圖1所示。
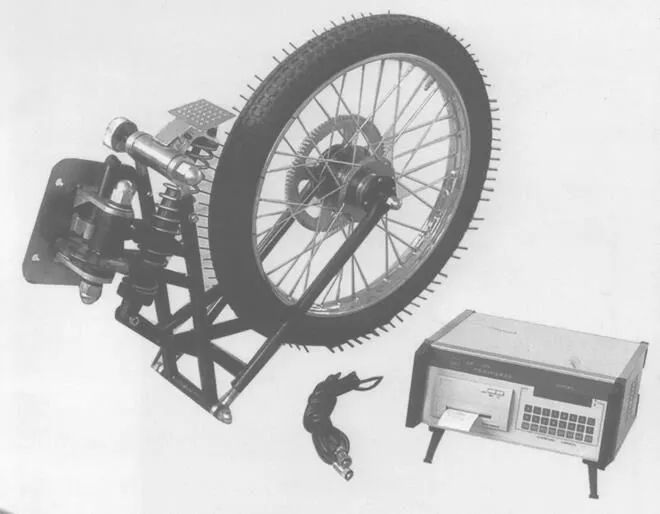
圖1 接觸式第五輪儀
另一種是光電式非接觸式第五輪儀,利用光學原理測量出車輛與地面的相對移動距離信號。車輛行駛時,非接觸式第五輪儀光源發(fā)出的光垂直照射地面,空間濾光片傳感器接受地面反射來的光信號,把其轉換為電信號輸送到主機,并進行數據轉換與處理,得到速度電壓模擬量輸入車輛數據采集及處理系統(tǒng)。由車輛數據采集及處理系統(tǒng)把速度電壓模擬量轉換為速度電壓數字量,并把結果保存為二進制文件。如圖2所示。
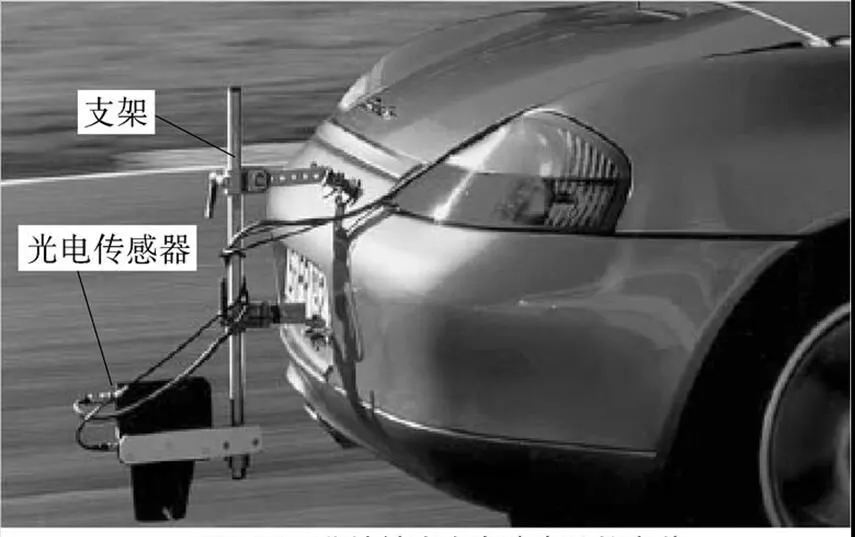
圖2 非接觸式第五輪儀
光電式編碼器使用測周法或測頻法,通過測量相連脈沖的間隔時間或單位時間內的脈沖數轉換算出車速,但路況和安裝不當會使編碼器在行使過程中產生抖動,影響測量精度。
2 GPS-RTK測速方法
2.1 GPS簡介
GPS全稱為全球定位系統(tǒng)(global positioning system),是美國國防部自20世紀60年代起花了20年時間、耗費100億美元研制開發(fā)成功的,它利用人造衛(wèi)星跟蹤、監(jiān)控既定目標,從而達到及時防御、救援的目的。該系統(tǒng)最初僅應用于軍事領域,20世紀90年代以來,隨著技術的不斷成熟,GPS先在民航飛機、遠航輪船等領域得到廣泛使用,繼而深入到國民經濟和社會生活的各個方面。GPS是一個基于衛(wèi)星的導航、定位及計時的系統(tǒng)。接受器通過(GPS)衛(wèi)星發(fā)送的數據計算二維(經度、緯度)或三維(經度、緯度、高度)位置。在軍事領域中,GPS單獨使用時其圓周率精度約12 m,當基站與一起使用時,差分GPS的精度可提高到2 m~5 m。民用GPS采用CA碼,在引入人為選擇可用性SA誤差后精度約為100 m,差分GPS可將精度提高到約10 m[3]。近年來,隨著全球定位系統(tǒng)(GPS)技術的快速發(fā)展,RTK(Real Time Kinematics)測量技術也日益成熟,RTK測量技術因其精度高、實時性和高效性,使得其在工程中的應用越來越廣。比如NovAtel公司最新推出的第三代GPS 接收機作為基準站和移動站接收機,它是一種高精度GPS 接收機,在RTK 差分模式下,定位精度可達到0.01 m,速度精度為0.03 m/s[5]。GPS -700 天線采用了NovAtel的風火輪技術( Pinwheel),是目前世界上唯一不需要外置扼流圈的零相位中心天線,能在惡劣自然環(huán)境中實現高精度定位。
3.2 GPS相對定位原理
GPS 相對定位是通過使用高性能的衛(wèi)星接收器,利用位置已知的衛(wèi)星( ≥4 個) 的坐標來確定一個被測目標的坐標(),通過地面接收機接收GPS衛(wèi)星系統(tǒng)發(fā)來的星歷參量和導航電文,根據衛(wèi)星所發(fā)射的無線電波信號的傳播延時,可以測定衛(wèi)星信號到達接收機的時間⊿,利用高等解析幾何來構造模型,建立三維位置量和一個時間量的方程,測量各衛(wèi)星與目標位置的距離,利用這些計算結果,接受器通過三角定位求出衛(wèi)星和接收機之間的距離,進而可確定接收器在地面上的位置[2]。如圖3所示,假設時刻在地面待測點上安置GPS接收機,可以測定GPS信號到達接收機的時間△,再加上接收機所接收到的衛(wèi)星星歷等其它數據可以確定以下4個方程式:
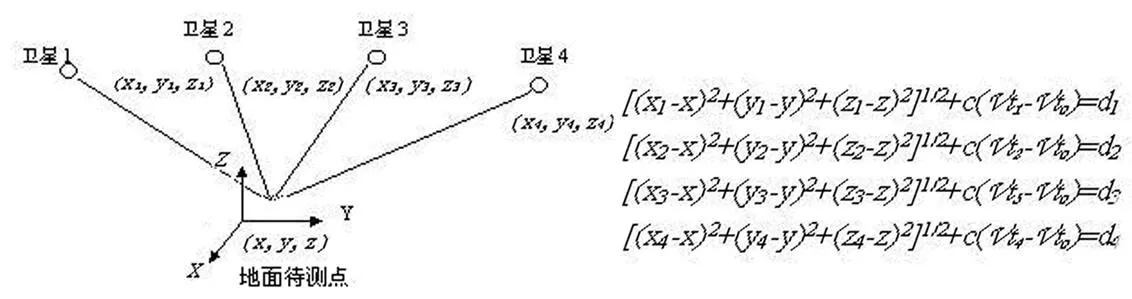
圖3 GPS 相對定位原理圖
式中為待測點坐標的空間直角坐標。
xyz(=1、2、3、4) 分別為衛(wèi)星1、衛(wèi)星2、衛(wèi)星3衛(wèi)4在t時刻的空間直角坐標,由衛(wèi)星導航電文求得。Vt(=12、3、4) 分別為衛(wèi)星1、衛(wèi)星2、衛(wèi)星3、衛(wèi)星4的衛(wèi)星鐘的鐘差,由衛(wèi)星星歷提供。o為接收機的鐘差。
d=△t(=1、2、3、4)。
d(=1、2、3、4) 分別為衛(wèi)星1、衛(wèi)星2、衛(wèi)星3、衛(wèi)星4到接收機之間的距離。
△t(=1、2、3、4) 分別為衛(wèi)星1、衛(wèi)星2、衛(wèi)星3、衛(wèi)星4的信號到達接收機所經歷的時間。
為GPS信號的傳播速度(即光速)。
由以上4個方程即可解算出待測點的坐標和接收機的鐘差o。
2.3 實時動態(tài)差分(RTK)定位技術
實時動態(tài)差分(RTK) 定位技術是GPS 測量技術與數據傳輸技術的結合,是GPS 測量技術中的一個新突破。RTK定位是以載波相位觀測量為根據的實時差分GPS 測量技術,其基本思想是:兩臺GPS接收機一臺設為靜態(tài)基準站,一臺設為動態(tài)移動站(用戶觀測站),在基準站上GPS 接收機,對所有可見GPS 衛(wèi)星進行連續(xù)地觀測,并將其觀測數據通過無線電傳輸設備,實時地發(fā)送給動態(tài)移動站(用戶觀測站)。在用戶站上,GPS 接收機在接收GPS衛(wèi)星信號的同時,通過無線電接收設備,接收基準站傳輸的觀測數據,然后根據相對定位原理,在系統(tǒng)內將這些信號合成為差分觀測值進行實時處理,實時地解算整周模糊度未知數并計算顯示用戶站的三維坐標及其精度。此方法可以消除多項測量誤差,從而得到較為精確的動態(tài)待測點位置信息,實時給出精度達厘米級的點定位坐標[6]。隨著美國對民用衛(wèi)星定位精度的進一步放開及RTK 技術的不斷發(fā)展, GPS 測量精度越來越高,使得用來獲取高精度汽車狀態(tài)信息成為可能[5-6]。
2.4 測速方法
GPS-RTK動態(tài)相對定位是將一臺GPS 接收機架設在固定的參考點作為基準站,另一臺GPS 接收機(移動站) 架設在被測目標上,兩臺接收機同步觀測相同的衛(wèi)星,以確定被測目標相對參考點的位置。實地測定車速時,將GPS 基準站架設在無遮蔽的高地上,把移動站架設在實驗車上,就可以測得目標車的運動速度。GPS 采集車速可以分為跟車法和實驗車法。這兩種方法都是用安裝在實驗車頂部的GPS 移動站,記錄車輛行駛過程中衛(wèi)星的原始星歷文件,與基準站數據相參照解算出實驗車的行駛軌跡,從而求解車速。二者的差別在于,跟車法是在選定路段上駕駛實驗車對符合觀測標準的車輛進行跟蹤測量,GPS 移動站所記錄的數據是實驗車的動態(tài)位置[4]。由于實驗車是在跟蹤前方被測車輛,所以數據能間接反應被測車輛的行駛狀態(tài);實驗車法是選定若干名駕駛員,由這些駕駛員分別駕駛實驗車在選定路段上以自己習慣的方式自由駕車,故移動站記錄的數據即為被測車輛(也即是實驗車本身) 的真實值。
GPS 的定位精度受多種因素的限制,主要因素是電離層的天氣狀況造成的信號延遲及從附近建筑物和地面反射造成的延遲。在手持式娛樂用GPS 接收器中,速度每秒鐘測量一次,通過現在的位置值減去之前的位置值來計算。這種計算方法受以上誤差的影響,結果不適合于需要高精度的數據分析。目前,比較先進的GPS 定位測量系統(tǒng)使用多普勒變換轉換從每顆衛(wèi)星來的載波信號,一個雷達槍用來計算速度[2]。這樣,載波頻率就不會受到電離層和反射的影響,最終速度的精度能達到1 cm/ s,這種技術使GPS 成為測量移動車輛速度精度最高的方法之一。
在測試中,只要汽車所在位置的坐標值能準確確定,即汽車行駛軌跡中每個點的坐標值確定了,那么包括速度、加速度、制動距離、里程以及與汽車行駛有關的其它狀態(tài)信息也就隨之確定[5]。
4 幾種測速方法的比較
車速測量系統(tǒng)的好壞主要取決于其測量精度和不同路面的適用性。
接觸式第五輪儀價格較低,在低、中速范圍尚能滿足一般測試需要,其缺點是輪圈直徑有誤差。另外,在速度較高時,路面稍許不平會出現一定的跳躍現象,因為車輛顛簸造成的“卷起”使第五輪滾回去然后停下來,使測量時間比其他傳感器記錄的長一些,從而帶來測量誤差。如果路面不平度增大,其誤差會變得更大。此外,第五輪儀需要支架固定,安裝非常不便。現在不多使用。
光電式非接觸式第五輪儀價格比接觸式第五輪儀高一些,但精度也有明顯提高。但在潮濕的低附著系數路面上測量時非常容易出現信號丟失現象,這是由于光電式非接觸第五輪儀是靠內部的空間濾光片傳感器接受地面反射來的光來進行信號采集,而濕的低附著系數路面無法實現光線的良好反射,導致信號丟失、儀器失效。
GPS車速測試系統(tǒng),體積小,攜帶、安裝方便,而且安裝后即可進行工作,不需要進行繁雜的調試,測量不受路面情況限制,但價格昂貴。另外,由于是靠衛(wèi)星來定位,可以進行側向、垂向運動和空間位置的測量,這是其顯著優(yōu)點。其缺點是當車輛穿行在城市高樓區(qū)、立交橋、林蔭道和隧道等處時,常出現衛(wèi)星信號遮擋問題,隨著GPS 定位技術的不斷提高、通信衛(wèi)星的免費使用,加上數據采集的方便性,該類測試系統(tǒng)逐漸成為車輛性能測試的主要設備[2]。
[1] 陸晶晶, 等. 基于GPS和加速度計的車速測量系統(tǒng)的開發(fā)與研制[J]. 測控技術, 2007, 26(8).
[2] 張利鵬,等. 幾種車速測量裝置的工作原理與性能比較[J]. 公路與汽運, 2008(2).
[3] 徐哲, 等. GPS在汽車運輸中的應用[J]. 交通企業(yè)管理, 2006(8).
[4] 黃天. GPS 在車速采集中的應用方法[J].湖南理工學院學報:自然科學版, 2005 , 18(1).
[5] 楊春生, 等. 基于RTK-GPS的汽車行駛記錄儀檢測系統(tǒng)[J].汽車技術, 2007(10).
[6] 楊春生, 等. 基于GPS -RTK 技術的汽車運動穩(wěn)定性檢測系統(tǒng)[J].四川大學學報:工程科學版.
The Measurement Method of Vehicle Speed in Vehicle Testing
Dai Cungong
(Electromechanical and Automation Engineering Department, Fujian University of Technology, Fuzhou 350108, China)
The common measurement methods of vehicle speed in the vehicle testing were introduced. The advantages and disadvantages of the measurement methods were compared. The modern speed measurement method based on global positioning system (GPS) was focused.
vehicle speed measurement; global positioning system (GPS);the fifth wheel
福建省教育廳項目(JA08166),福建省科技平臺建設項目(2008J1002)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25