小視場紅外探頭標定用離軸反射式平行光管設計
2010-03-16 07:42:58于劍張國玉
長春理工大學學報(自然科學版) 2010年1期
關鍵詞:系統
于劍 ,張國玉 ,2
(1.長春理工大學 光電工程學院,長春 130022;2.光電測控與光信息傳輸技術教育部重點實驗室,長春 130022))
地球張角是衡量準直式紅外地球模擬器精度的重要指標,而小視場紅外探頭是標定地球模擬器張角的關鍵部件,為測試小視場紅外探頭的視場,采用平行光管與兩軸轉臺相結合的方案對其視場進行標定[1]。本文所設計的離軸反射式平行光管僅作為提供光源的一種載體,為標定被測探頭的視場提供準直光源。
1 小視場紅外探頭視場標定原理
視場標定裝置如圖1所示。離軸反射式平行光管1由離軸拋物面鏡6和平面反射鏡5組成,在平行光管的焦點處放置一個小孔光闌3,小孔光闌的后面為調制器2和黑體1,兩者的作用是使光管產生一定張角的調制平行光。在兩軸轉臺7上放置被測小視場紅外探頭8,探頭為紅外望遠鏡頭,平行光在探頭焦面上的熱敏電阻上成像(熱成像),使探頭輸出電壓信號。當成像在視場邊界上時,輸出值為峰值的50%左右,由此可確定視場邊界。
2 平行光管方案的確定
透射光學系統由于受到光學材料的限制,很難做到大口徑和輕量化設計,反射式系統受材料限制小,便于輕量化,完全沒有色差,各種波長光線所成的像是嚴格一致完全重合的,可以在紫外到紅外的很大波長范圍內工作,傳輸能量大,系統透過率高。所以擬采用反射式系統。

圖1 小視場紅外探頭視場標定裝置Fig.1 The equipment for calibration of small FOV infrared probe
而在球面反射鏡和非球面反射鏡兩種方案中,球面反射鏡僅有一個參數R決定其面形,它在系統中當光闌位于球心時,不產生像散,球差也很小。非球面其面形是由幾個參數決定的,能使平行光束完善地會聚于一點,但加工難度大。由于被測件精度要求較高,所以選用拋物面反射鏡,為保證反射面不變形,中心厚度應取厚一些。
為使拋物面反射鏡的焦點正好在光軸上,同時光管要求在有效孔徑內不能被遮擋,所以要從大的拋物面鏡中偏離光軸切割出所需孔徑,這樣便成為離軸式拋物面反射鏡[2]。
離軸的特點使平行光管成像不會產生很大的模糊,這一特點是非常有價值的,主要是由于發射或接收的信號都沒有被遮攔。偏斜的反射鏡為平板式,對從紅外平行光管出射的光束進行重導,整個反射鏡的光學特性較為成功。
該光管作為準直光源使用,其原理是在光管離軸拋物面反射鏡焦點處放置一光源,其發出的一束光入射到平面反射鏡后,經反射投射到離軸拋物面反射鏡上,然后形成具有一定準直精度的平行光。
實際使用中,紅外光源是不可能放在焦點處的,通常采用在焦點處放置光闌孔,用具有足夠張角的紅外光源照亮,從而形成等效光源。光闌孔的大小就是拋物面反射鏡焦點上的光源直徑的大小,它決定光管出射的平行光的張角。
3 設計思想
根據系統的技術指標,焦距 f=800mm,有效口徑D=160mm,工作波段14~16m,視場0.1°,準直精度30"。因為平行光管的焦距和口徑都已確定,所以在設計過程中要考慮離軸量h的大小,平面反射鏡的大小及其放置的位置。在設計時,可將平行光管作為對無窮遠目標成像系統來考慮,在同一視場內,離軸量h越大,光學系統成像的彌散斑越大,對系統的成像質量有一定的影響;而離軸量h的增大會增加非球面度和母拋物面直徑,從而增加了加工難度和加工周期,所以在設計時,應盡量減小離軸量h的大小,但離軸量h過小會造成平面反射鏡遮擋出射光束的現象。因此平面反射鏡應放置在不遮擋視場邊緣出射光束的位置上,同時距離光源要有一定距離,考慮到平面反射鏡的結構裝卡需要,圖2中的平面反射鏡上端面至系統下方出射光束的距離a應大于2mm,平面反射鏡的下端面至焦點的距離b應大于10mm就可以滿足上述要求[3]。
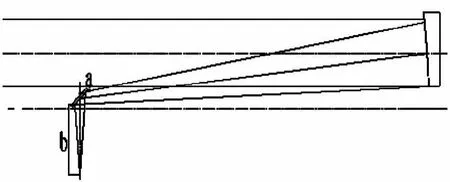
圖2 離軸反射式平行光管光路圖Fig.2 Optical path of the Off-axis Parabolic Reflective Collimator
軸對稱二次曲面方程一般表示為:
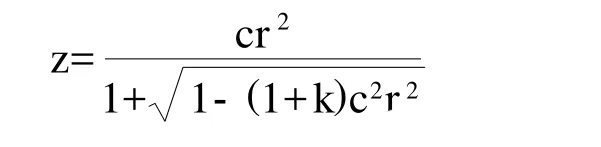
式中,z為曲面上各點沿光軸方向坐標;r為光線與曲面交點高度;c為頂點曲率;k為二次曲面常量,k=1時二次曲面為拋物面。
根據已知數據,應用ZEMAX軟件進行離軸設計,選取主鏡和次鏡的離軸量,在設計過程中對數據進行調整及優化。優化后系統結構參數如表1所示。
將離軸量h與a、b綜合考慮,經過幾次試取h值后,離軸量h=110mm;主鏡與次鏡距離640mm;平面鏡半徑尺寸為16mm;a大約為8.8mm,b大約為66.7mm,滿足a、b距離的要求。
在設計過程中得到以下結論:
(1)當主鏡的離軸量增大時,平面反射鏡的最大尺寸也在增大,而a也在變大,則平面鏡的可調范圍也越大[4]。
(2)由離軸拋物面反射式平行光管的工作原理可以看出,平面反射鏡只是起到了折轉和折疊光路的作用,因此對平面反射鏡位置的恰當放置可以減輕平行光管的體積和重量[5]。

表1 光學結構參數表Tab.1 Optical structure parameters
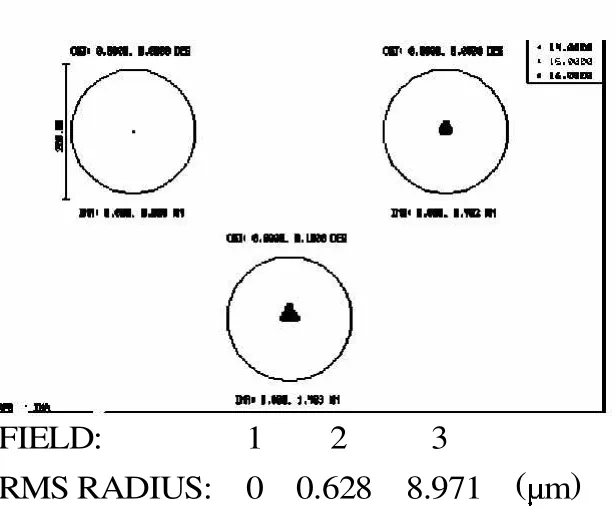
圖4 系統點列圖Fig.4 The system spot diagram

圖5 系統調制傳遞函數Fig.5 The system MTF

圖6 系統波前圖Fig.6 The system wavefront map
4 像質評價
由準直度與分辨力之間的關系式

式中: 為準直精度;f'為系統焦距;d為系統最小彌散斑直徑。根據上述公式

系統點列圖如圖4所示,系統各視場的衍射光斑彌散點都在艾里斑之內,且各視場的彌散斑直徑均小于技術指標要求的116.355m,由圖5的MTF曲線圖可以看出各視場傳遞函數曲線也基本與衍射極限重合,而圖 6系統波前圖可以看出波前差為0.0878個波長已經達到1/11個波長。綜合以上像質分析,系統成像質量良好,且達到所要求的準直精度。
5 結論
為實現對紅外探頭進行視場標定,本文設計了一種離軸反射式平行光管,根據所提出的技術指標,確定了平行光管的具體結構參數。針對像質分析看出,該系統像差校正良好,且達到了所提出的準直精度要求,設計方案正確可行。
[1]段潔,孫向陽,張國玉,等.衛星實驗用小型地球模擬器張角測試方法的研究[J].儀器儀表用戶,2008,15(6):8-10.
[2]楊力,吳時彬,高平起,等.420mm離軸拋物面反射鏡的制造[J].光學技術,1998(3):44-47.
[3]王響.反射式準直系統設計與檢測[D].中國優秀碩士學位論文全文數據庫,2007.
[4]趙茗,黃德修,劉小英,等.離軸拋物面反射式平行光管的結構設計[J].華中科技大學學報,2005,33(4):67-69.
[5]田海雷,汪岳峰,張偉.離軸拋物面反射式紅外平行光管設計[J].紅外技術,2007,29(12):701-707.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
