一種單傳感器實時系統(tǒng)誤差配準(zhǔn)算法
2010-03-24 13:41:40崔亞奇
海軍航空大學(xué)學(xué)報 2010年6期
關(guān)鍵詞:信息
宋 強,崔亞奇,何 友
(海軍航空工程學(xué)院 電子信息工程系,山東 煙臺 264001)
0 引言
目前,盡管多傳感器信息融合技術(shù)及其理論有了飛速的發(fā)展,但是在實際的多雷達網(wǎng)數(shù)據(jù)處理系統(tǒng)中仍然有很多技術(shù)難點需要攻克,而傳感器系統(tǒng)誤差配準(zhǔn)問題就是其中一個研究熱點[1]。傳感器系統(tǒng)誤差配準(zhǔn)的目的是準(zhǔn)確估計并校正傳感器的固有系統(tǒng)偏差,為其后端航跡關(guān)聯(lián)與融合提供技術(shù)保障,其處理好壞將直接影響多傳感器信息融合系統(tǒng)融合性能與可靠性[2]。
由于傳感器誤差配準(zhǔn)技術(shù)均需利用各傳感器對固定或運動目標(biāo)的觀測信息來實施。因而,按照目標(biāo)的合作程度,可將當(dāng)前主要的誤差配準(zhǔn)技術(shù)分為兩大類,分別是基于合作式目標(biāo)信息與非合作式目標(biāo)信息的傳感器配準(zhǔn)技術(shù)。
對于基于合作式目標(biāo)的傳感器配準(zhǔn)技術(shù)[3-7],其前提是能夠獲取位置已知的固定目標(biāo)或者能夠?qū)崟r提供高精度自身定位信息的運動目標(biāo)(即合作式目標(biāo)),再基于上述目標(biāo)位置信息與傳感器對目標(biāo)量測信息構(gòu)建系統(tǒng)誤差觀測模型來實施系統(tǒng)誤差配準(zhǔn)與補償。采用這類技術(shù)無須多傳感器協(xié)同,單部傳感器自身就能達到系統(tǒng)誤差的準(zhǔn)確配準(zhǔn),但缺點是需要實時獲取目標(biāo)位置,并能夠與傳感器進行協(xié)同配準(zhǔn);而當(dāng)無法獲知目標(biāo)真實位置信息時,就需要采用基于非合作式目標(biāo)的配準(zhǔn)技術(shù)[8-12],但其前提是需要多傳感器之間進行協(xié)同配準(zhǔn),即基于多傳感器對同一運動目標(biāo)的量測信息來構(gòu)建對多傳感器系統(tǒng)的觀測模型,以實現(xiàn)對各傳感器的精確誤差配準(zhǔn)。因而,該類技術(shù)的優(yōu)點是無須目標(biāo)自身提供定位信息,但缺點是需要多傳感器進行協(xié)同配準(zhǔn)處理,這就首先需要對目標(biāo)航跡數(shù)據(jù)進行可靠關(guān)聯(lián),但此時各傳感器未配準(zhǔn)的固有系統(tǒng)誤差又將使得航跡關(guān)聯(lián)性能不可靠,導(dǎo)致關(guān)聯(lián)與配準(zhǔn)間產(chǎn)生技術(shù)矛盾的問題[13],此外,傳感器間的協(xié)同配準(zhǔn)還將面臨著異步傳感器的數(shù)據(jù)時間同步問題,并且傳感器間的數(shù)據(jù)通信需求還將對通信數(shù)據(jù)鏈造成較高的負擔(dān)。
因此,為克服非合作式目標(biāo)配準(zhǔn)技術(shù)需要多部傳感器相互配合進行,以及合作式目標(biāo)配準(zhǔn)技術(shù)需要目標(biāo)與傳感器協(xié)同處理等需求局限所帶來的問題。本文研究基于非合作式固定目標(biāo)的單傳感器系統(tǒng)誤差配準(zhǔn)問題,并提出一種單傳感器實時系統(tǒng)誤差配準(zhǔn)算法,算法利用運動平臺傳感器對固定目標(biāo)的2時刻量測,構(gòu)建系統(tǒng)狀態(tài)方程及量測方程,通過濾波技術(shù)實現(xiàn)利用位置未知的固定目標(biāo)對單傳感器系統(tǒng)誤差的實時精確配準(zhǔn)。
1 系統(tǒng)描述與配準(zhǔn)算法模型
假設(shè)一部二坐標(biāo)傳感器對一固定但位置未知的目標(biāo)進行探測定位,傳感器所在平臺能夠在公共笛卡爾坐標(biāo)系中進行一定程度的運動(勻速直線、勻速圓周運動或其他機動運動),設(shè)k時刻傳感器定位系統(tǒng)獲取的自身公共坐標(biāo)為而相應(yīng)的傳感器真實坐標(biāo)為(xs(k),ys(k)),則其定位量測方程為

假設(shè)傳感器具有測距和測方位角系統(tǒng)誤差,且分別表示為Δr、Δθ;且傳感器具有標(biāo)準(zhǔn)差分別為σr和σθ的零均值高斯分布隨機量測誤差,分別表示為δr (k)、δθ(k)。
此外,設(shè)在公共笛卡爾坐標(biāo)系中,目標(biāo)的真實坐標(biāo)為(x,y),k時刻目標(biāo)在傳感器局部極坐標(biāo)系中的真實極坐標(biāo)為(r (k),θ (k)),則相應(yīng)的傳感器對目標(biāo)的極坐標(biāo)測量值為
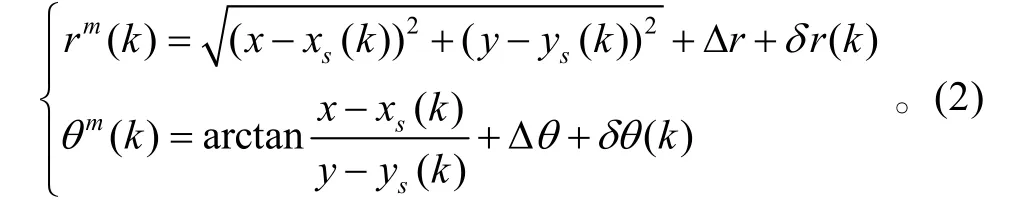
由于上式中傳感器位置定位真值需采用測量值代替,而上述測量值只和目標(biāo)坐標(biāo)真值與傳感器定位量測值間的差值有關(guān)。
這樣則可將傳感器定位隨機誤差作為目標(biāo)位置具有一定程度的動態(tài)過程噪聲來建模。
定義
這樣,式(2)就相應(yīng)地轉(zhuǎn)化為

這樣,利用k和k?1 兩時刻的有關(guān)值,定義k時刻的系統(tǒng)狀態(tài)向量、兩時刻量測以及隨機誤差向量分別為
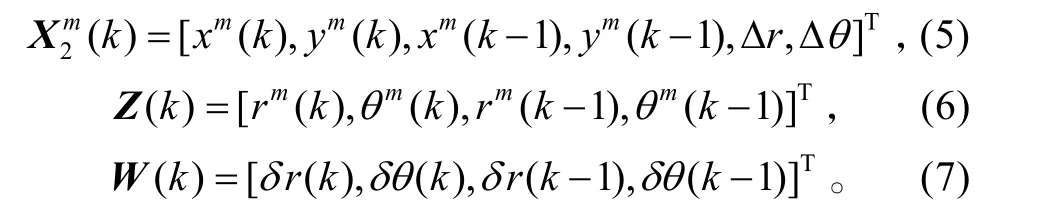
因而,2時刻系統(tǒng)量測方程為
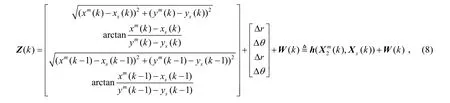
式中:隨機量測誤差 W(k)的協(xié)方差為R(k)。
由式(3),對于k和k-1 兩時刻有

因而,由式(9)、(10)可得系統(tǒng)狀態(tài)的動態(tài)方程為

式中,

為系統(tǒng)過程噪聲,且相應(yīng)的過程噪聲協(xié)方差為

這樣,根據(jù)式(8)、(11)中給出的系統(tǒng)量測方程和狀態(tài)方程,可列出相應(yīng)的兩時刻EKF濾波方程組:
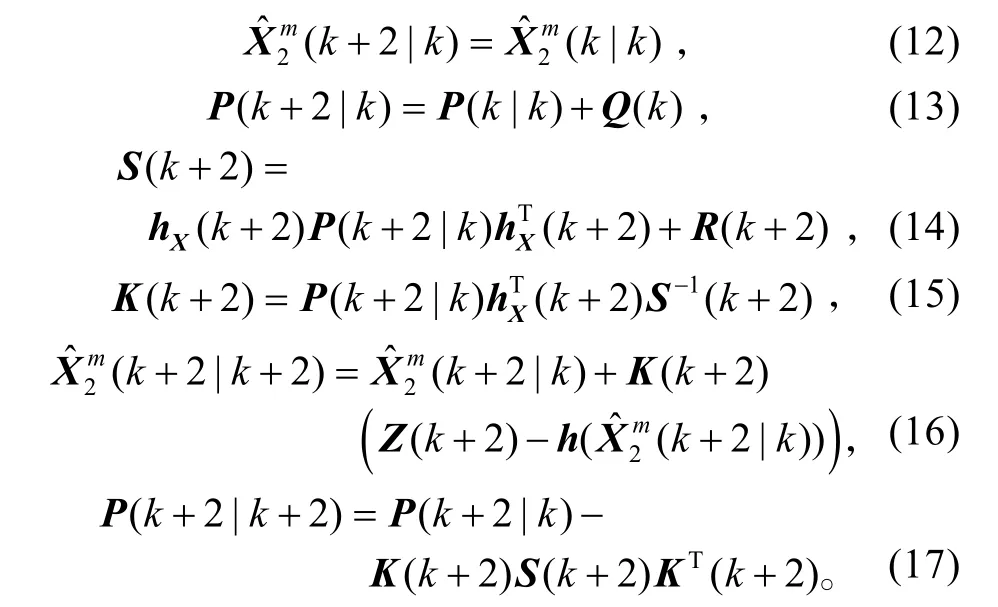
式(14)中,h的雅可比矩陣是


2 仿真驗證與分析
采用100次蒙特卡洛仿真,每次仿真時長設(shè)置為800 s,采用本文提出的算法模型對單傳感器系統(tǒng)誤差進行實時估計。
假設(shè)傳感器探測區(qū)域中固定目標(biāo)的真實位置設(shè)為(50 km,50 km);傳感器的測距與測角系統(tǒng)誤差分別設(shè)置為1 km和1°;傳感器自身的定位隨機誤差標(biāo)準(zhǔn)差為10 m,測距與測角隨機誤差標(biāo)準(zhǔn)差分別為K×10 m和K×0.1°,其中,K=5,…,10,設(shè)上述測量均服從零均值高斯分布。
這里假設(shè)傳感器做角速度為?0.005 rad/s的勻速圓周運動,且其初始狀態(tài)為[60 km,0 m/s,50 km,250 m/s]。
仿真結(jié)果如圖1、圖2和表1所示,其中圖1、圖2分別舉例給出了量測隨機誤差設(shè)置K=5時,傳感器測距、測角系統(tǒng)誤差的單次仿真實時估計曲線;而表1分別列出了在隨機誤差參數(shù)K的幾種設(shè)置情況下,100次蒙特卡洛仿真后獲得的測距和測角系統(tǒng)誤差最終估計均方根誤差。
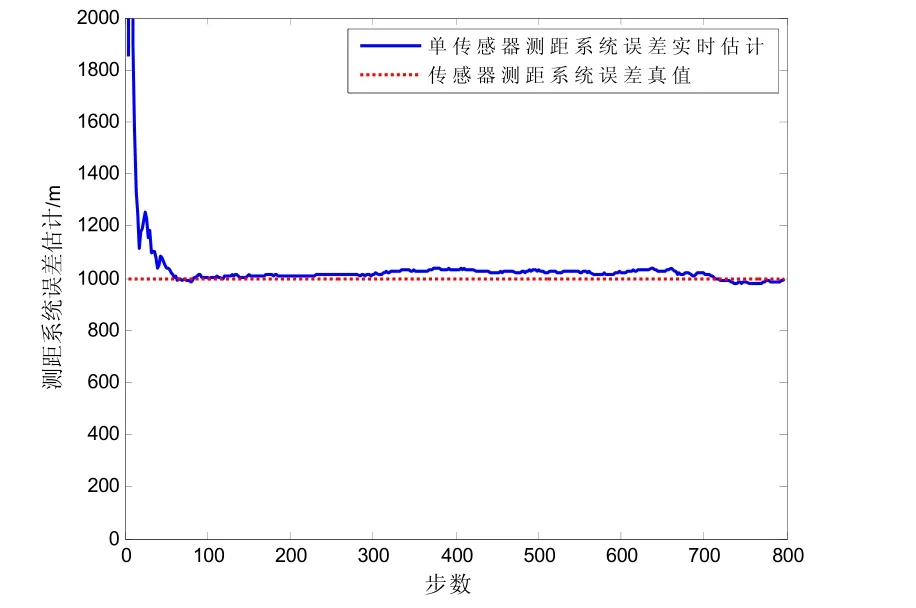
圖1 測距系統(tǒng)誤差實時估計
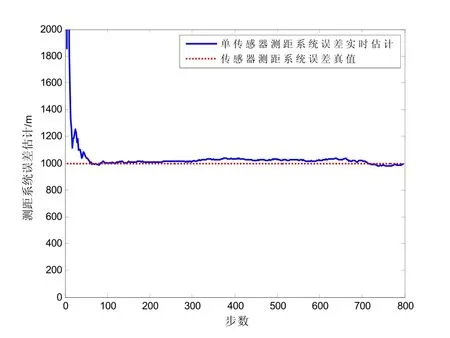
圖2 測角系統(tǒng)誤差實時估計
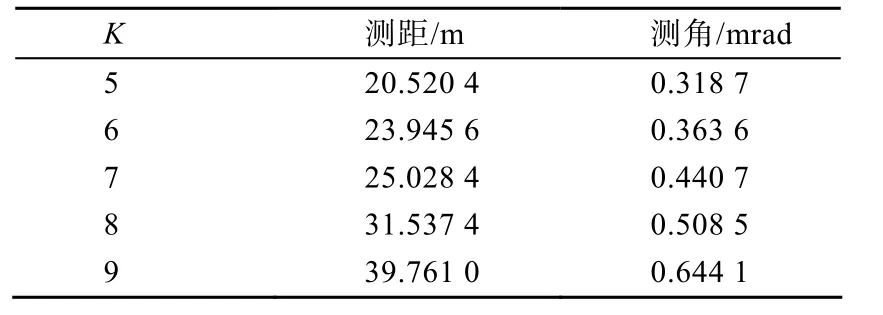
表1 系統(tǒng)誤差估計均方根誤差
從圖1、圖2所示的系統(tǒng)誤差實時估計曲線可以看出,在K=5的仿真環(huán)境中,本文算法對傳感器測距、測角系統(tǒng)誤差的濾波估計能夠迅速地逼近系統(tǒng)誤差真值,具有比較快的濾波收斂速度,且對系統(tǒng)誤差的估計性能穩(wěn)定,并顯示算法具有較高的實時配準(zhǔn)精度。
而由表1中給出的系統(tǒng)誤差的最終估計RMSE值可看出,在各種不同參數(shù)設(shè)置情況下,本文所提出的單傳感器實時系統(tǒng)誤差配準(zhǔn)算法均表現(xiàn)出很好的系統(tǒng)誤差配準(zhǔn)估計性能,其中對于傳感器測距系統(tǒng)誤差的估計誤差不超過40 m,而對測角系統(tǒng)誤差的估計誤差最多也不超過0.7 mrad,通過對傳感器量測進行誤差補償將能夠大幅度地降低系統(tǒng)誤差對傳感器探測融合性能的影響,這充分說明了本文算法較高的配準(zhǔn)性能和算法有效性。
在幾種常見傳感器測量隨機誤差(K)的設(shè)置情況下,通過對比表1中給出的算法所獲得系統(tǒng)誤差最終估計均方根誤差不難看出,傳感器量測隨機誤差對算法誤差配準(zhǔn)性能有一定的影響,隨著隨機測量誤差標(biāo)準(zhǔn)差的增大,系統(tǒng)誤差估計精度則出現(xiàn)逐漸下降的趨勢,但均能較好地滿足傳感器系統(tǒng)誤差配準(zhǔn)的需求。
3 結(jié)束語
本文對運動平臺單傳感器系統(tǒng)誤差配準(zhǔn)問題進行了研究,并提出了單傳感器系統(tǒng)誤差的實時配準(zhǔn)算法。算法無須已知目標(biāo)位置或目標(biāo)主動為傳感器提供自身導(dǎo)航定位信息,又沒有多部傳感器間進行協(xié)同配準(zhǔn)處理的需求,具有濾波結(jié)構(gòu)簡單、收斂性好、配準(zhǔn)性能穩(wěn)定等優(yōu)點。
蒙特卡洛仿真結(jié)果驗證了本文算法利用固定目標(biāo)進行單傳感器實時系統(tǒng)誤差配準(zhǔn)的有效性。
[1]董云龍.雷達組網(wǎng)系統(tǒng)中的誤差配準(zhǔn)技術(shù)研究[D].煙臺∶海軍航空工程學(xué)院,2007.
[2]何友,王國宏,關(guān)欣.信息融合理論及應(yīng)用[M].北京∶電子工業(yè)出版社,2010∶524-525.
[3]ONG HWA-TUNG.Sensor registration using airlanes∶maximum likelihood solution[C]//Signal and Data Processing of Small Targets.Bellingham,SPIE,2003∶390-399.
[4]PAUL D BUMS,W DALE BLAIR.Sensor bias estimation from measurements of known trajectories[C]//Proceedings of the Thirty-Seventh Southeastern Symposium on System Theory.2005∶373-377.
[5]吳澤民,任姝婕,劉熹.雷達系統(tǒng)誤差協(xié)同配準(zhǔn)算法研究[J].兵工學(xué)報,2008,29(10)∶1192-1196.
[6]孫海英.基于協(xié)同目標(biāo)的絕對配準(zhǔn)[J].艦船電子工程,2008,28(6)∶94-97.
[7]吳澤民,任姝婕,劉熹.組網(wǎng)雷達系統(tǒng)誤差合作校準(zhǔn)方法[J].探測與控制學(xué)報,2008,30(增刊)∶63-68.
[8]NICKENS OKELLO,BRANKO RISTIC.Maximum likelihood registration for multiple dissimilar sensors[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(3)∶1074-1083.
[9]LIN X D,BAR-SHALOM Y.Multisensor target tracking performance with bias compensation[J].IEEE Trans.on Aerospace and Electronic Systems,2006,42(3)∶1139-1149.
[10]QI YONGQING,JING ZHONGLIANG,HU SHIQIANG.New method for dynamic bias estimation∶gaussian mean shift registration[J].Optical Engineering,2008,47(2)∶1-8
[11]徐毅,陳非,敬忠良,等.基于擴展Kalman濾波的空基多平臺多傳感器數(shù)據(jù)配準(zhǔn)和目標(biāo)跟蹤算法[J].信息與控制,2001,30(5)∶403-407.
[12]陳非,敬忠良,姚曉東.空基多平臺多傳感器時間空間數(shù)據(jù)配準(zhǔn)與目標(biāo)跟蹤[J].控制與決策,2001,16(增刊)∶808-811.
[13]何友,宋強,熊偉.基于Fourier變換的航跡對準(zhǔn)關(guān)聯(lián)算法[J].航空學(xué)報,2010,31(2)∶356-362.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
