城市道路交通流仿真系統研究*
2010-04-10 10:42:28商蕾
武漢理工大學學報(交通科學與工程版) 2010年3期
商 蕾
(武漢理工大學能源與動力工程學院 武漢 430063)
隨著計算機科學的飛速發展,交通仿真被越來越多地應用于交通系統分析研究和決策支持中.交通仿真可分為宏觀仿真、中觀仿真和微觀仿真三類[1].其中,微觀交通仿真系統能在單車級上模擬“人-車-路-環境”的相互作用關系,反映交通基礎設施、交通管理手段、交通流控制策略等對交通流的影響.因此,微觀交通仿真建模和系統開發成為國內外的研究熱點.
本文在對微觀交通仿真模型建模研究的基礎上,利用面向對象開發工具和視景仿真環境,搭建一個微觀交通仿真系統.該系統能為城市重點城區道路網的擴建改建、交通管理、交通控制方案的制定、交通事故研究提供仿真分析與評價的平臺.
1 交通流仿真模型框架
與國外發達國家不同,我國的城市交通環境和駕駛員行為特性有其特殊性.目前,國內外尚無成熟的模型和工具來深入分析、研究我國的交通問題.因此,必須建立符合我國交通流特點的交通仿真模型[2-3].
在此筆者提出如圖1所示的微觀交通仿真模型框架.其中:
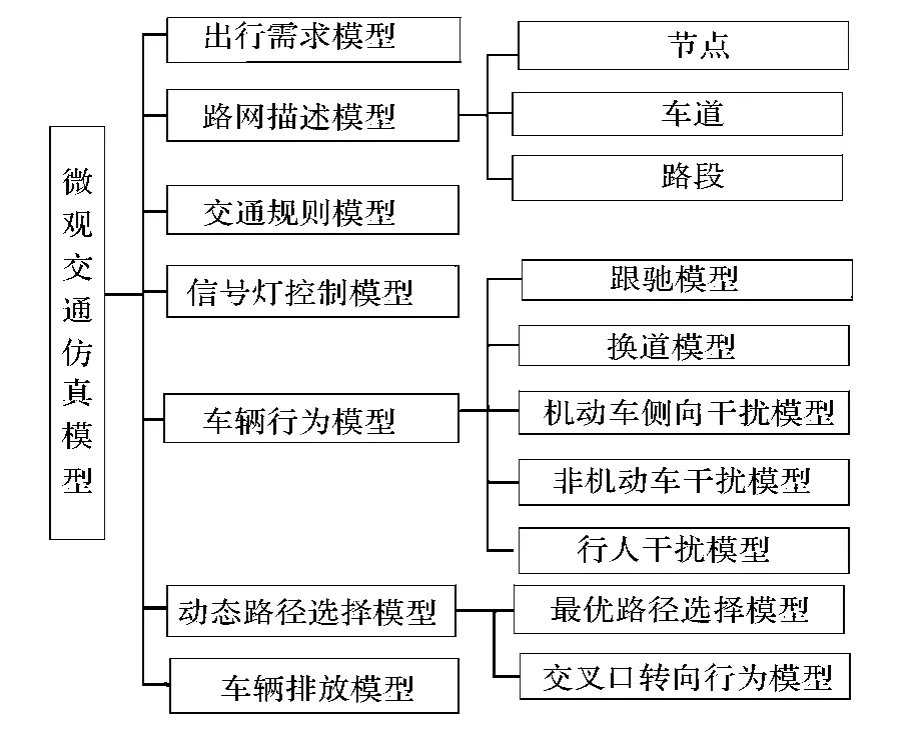
圖1 微觀交通仿真模型構成框架
1)路網描述模型和交通規則模型屬于靜態模型,在進入仿真運算后,模型各參數不再發生變化.路網描述模型通過定義合理的結構體,從點、線、面3個層次來反映路網拓撲關系,幾何特征等.而交通規則由于往往落實到車道的使用特性上,因此可以通過增加路網描述模型中相應的屬性變量來反映.
2)車輛行為模型是整個仿真模型的核心,其有效性直接決定交通流仿真的精度.傳統的車輛行為模型主要由跟馳模型和換道模型構成.在單車道或是在不允許超車行為的多車道上,位于后面位置的車輛受到跟馳作用的約束,只能跟著前車行駛.本文采用基于期望車頭時距的非線性跟馳模型.在該模型中,后車的加速度不僅與前后兩車的相對速度有關,還與兩車間距以及駕駛員反應延時有關.跟馳模型為

式中:τ為駕駛員的反應延遲;a為駕駛員對車速和距離的反應參數;b為駕駛員對車頭時距的反應參數;L為前車車身長度;T為期望車頭時距.
考慮到我國城市混合交通以及駕駛員行為特點,在開發具有自主知識產權的微觀交通仿真模型時應補充機動車側向干擾模型、非機動車干擾模型和行人干擾模型.
3)動態路徑選擇模型可分為最優路徑選擇模型和交叉口轉向行為模型.其中,最優路徑選擇模型用以選擇旅行總時間最短、旅行花費最小或是旅途中交叉口最少的路線.為了便于評估交通誘導措施對機動車駕駛員行為的影響,本文采用的是動態最優路徑選擇模型.交叉口轉向行為模型則根據路徑選擇模型的計算結果,確定車輛當前行駛方向和下一個路段行駛方向的相對位置關系,以便車輛在路口執行正確的轉向操作.
4)機動車排放模型選取IVE模型,并對IVE模型本地化進行相關調查研究,主要包括:環境影響因素、I/M 制度、燃油使用情況、車輛技術分布情況等.
2 基于實時視景仿真的城市道路交通流仿真系統設計
2.1 開發環境選擇
軟件主框架和人機交互界面用Visual C++開發[4-5].對于交通仿真數據的存儲和管理,則選用Microsoft Access數據庫進行.同時,為了使交通流仿真軟件能夠逼真地再現的三維道路交通流狀況,軟件的可視化部分由三維建模工具Creator和視景仿真環境Vega來實現(見圖2).
2.2 城市道路交通流仿真系統框架設計
本文開發的城市道路交通流仿真系統體系框架如圖3所示.
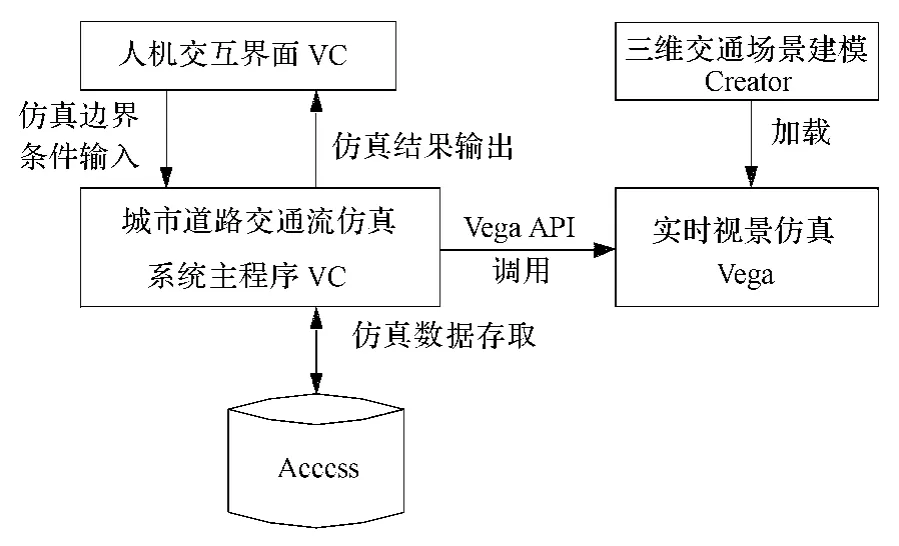
圖2 不同開發工具間的數據交互關系圖
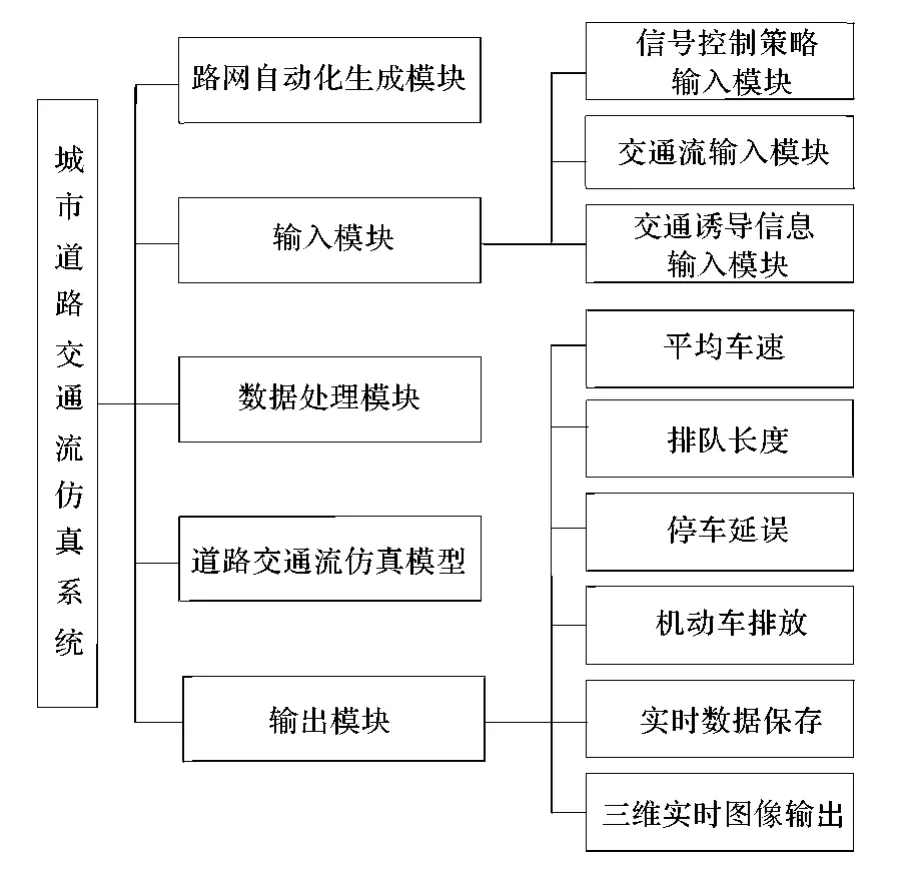
圖3 城市道路交通流仿真系統基本框架
可以看到,該原型系統能夠提供較豐富的仿真結果輸出,包括:車道(路段)平均車速、最大排隊長度、停車延誤、機動車排放(主要是CO排放量和NOx排放量).因此,基于自主研發的微觀交通流仿真模型,本文開發的城市道路交通流仿真原型系統軟件主要可應用于小路網交通管理方案分析與評價,信號控制策略分析,道路基礎設施改擴建實施效果評估.以信號控制策略分析為例,其基本仿真流程如圖4所示.
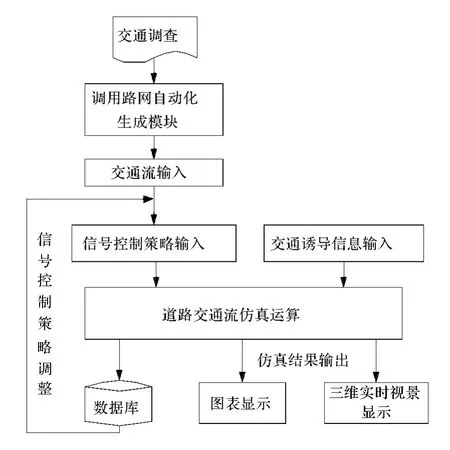
圖4 交通信號控制策略仿真基本流程圖
2.3 實時視景仿真技術的應用
結合虛擬現實技術、圖像處理等技術,將視景仿真引入道路交通流仿真系統中.在以文本、圖像、圖表等二維方式輸出仿真運算結果的同時,將路網內每個靜態、動態對象的實時狀態以三維視景方式進行顯示,用戶可從直觀觀測交通流運行狀態.通過在Vega環境中設置多窗口、多通道的方法,還能使用戶同時監控多個重點區域的交通狀況.
本文選擇實時仿真環境Vega作為三維可視化平臺,仿真模型與視景的交互主要由Vega API函數完成的,基本步驟如下.
步驟1 檢測應用定義文件,即ADF文件.ADF文件包含了在三維交通場景中需要顯示的所有對象及環境特性.
步驟2 初始化系統,包括視景系統、音效系統、特效系統等.
步驟3 定義視景系統.
步驟4 配置視景系統.
步驟5 用戶自定義代碼,根據交通流仿真模型運算結果,動態刷新三維場景內交通信號燈顯示狀態、路網內行駛的機動車、非機動車位置.
3 應用研究
在實地交通調查基礎上,運用開發的城市道路交通流仿真系統對北京市清華大學東門路口進行了仿真應用研究,取得了較好的仿真效果.
該路口的車流量情況見圖5,信號控制方案見圖6,仿真運行效果圖見圖7,車速及排隊長度實時變化曲線見圖8.
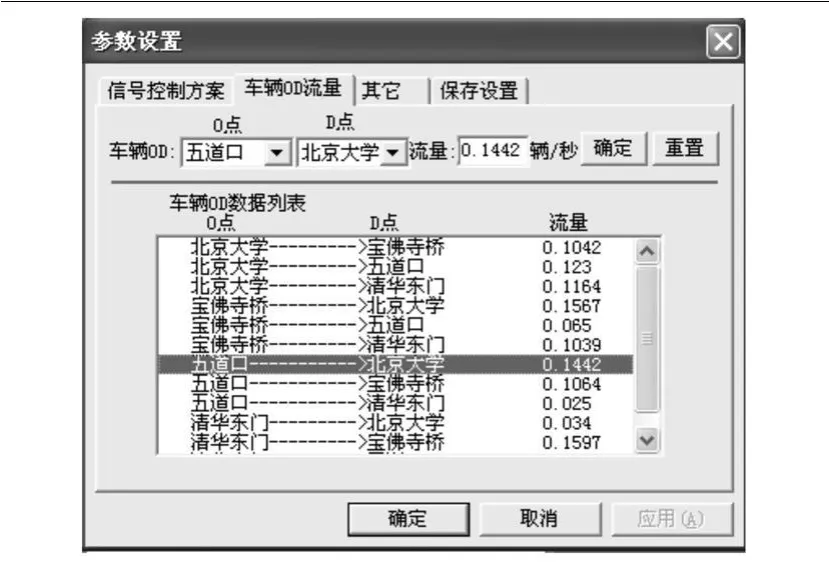
圖5 清華大學東門路口車流量
下面通過調整信號配時,增加交通流量以及改變路口設計分別再次進行仿真,以北進口內側車道為例,可得到如圖9和圖10的仿真對比結果.
圖中:方案1為現狀仿真;方案2為增加北進口左轉方向車流量后進行的仿真;方案3為調整信號控制配時后進行的仿真(增加南北進口左轉綠燈時長至35 s);方案4為調整北進口道數目(左轉方向增加1條車道,其他條件不變)進行的仿真.
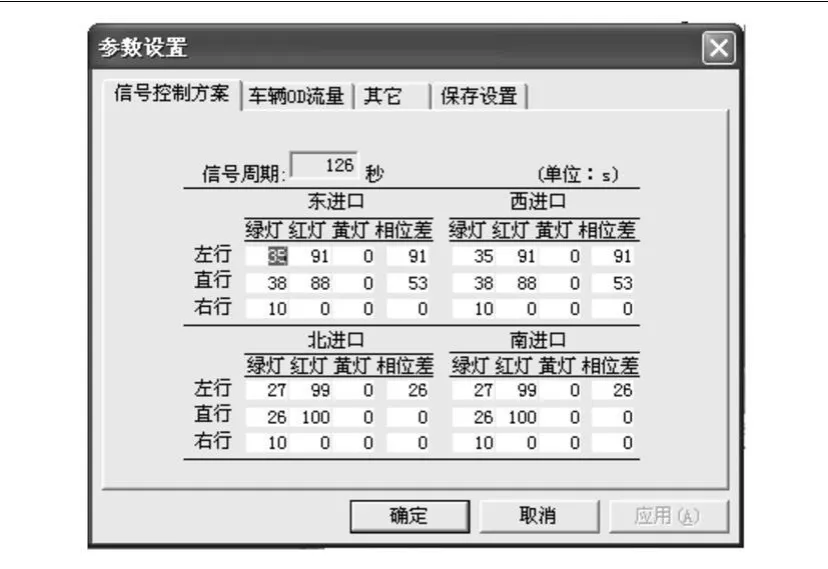
圖6 路口信號控制方案
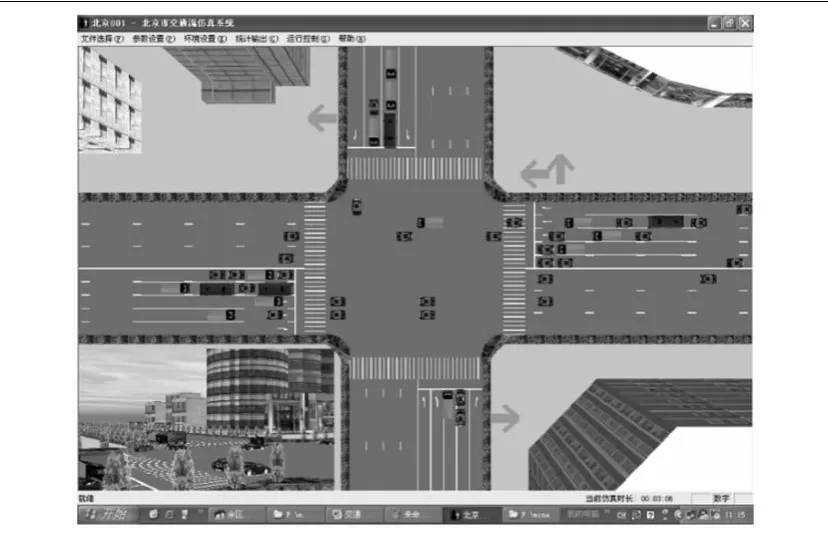
圖7 兩通道三維仿真運行圖(俯視圖和側視圖)

圖8 車速及排隊長度實時變化曲線
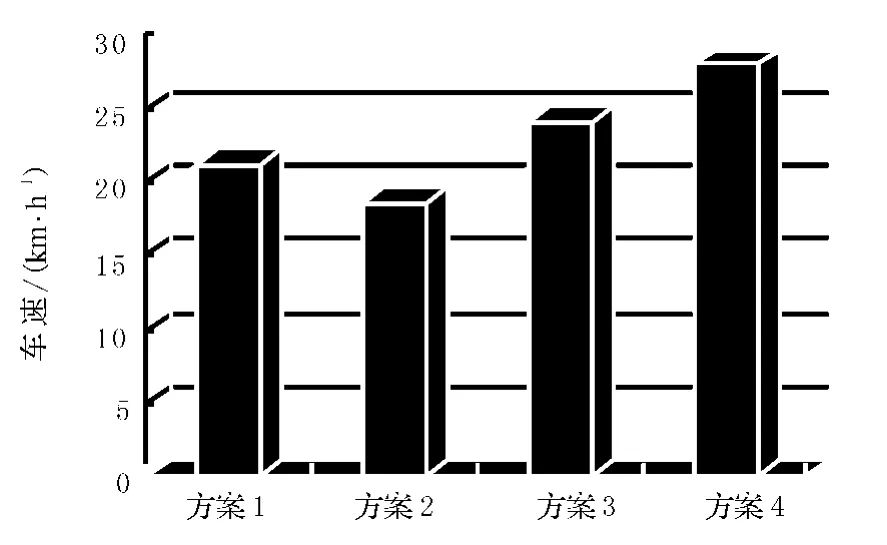
圖9 不同方案下的平均車速
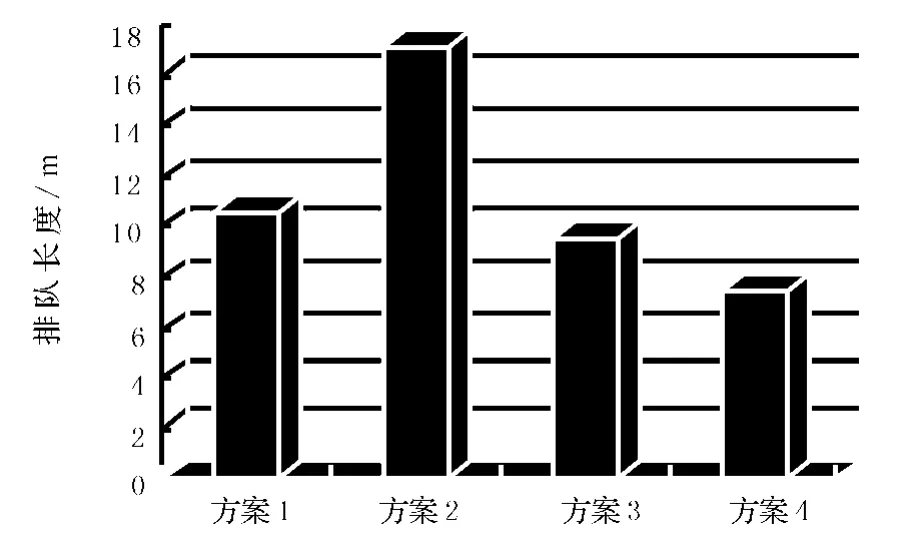
圖10 不同方案下的排隊長度
由上圖可以看出,增加車流量會導致行車速度降低,以及排隊長度的增加;而增加綠燈時長和增加車道數,則可以緩解該方向車輛排隊情況,提高行車速度.
4 結 束 語
本文基于我國城市道路交通流特點,對城市道路微觀交通流仿真的基礎模型進行了重點研究.借助計算機開發環境和視景仿真工具,開發了一個基于三維視景的城市道路微觀交通流仿真系統軟件.該模型仿真系統采用開放式框架體系和模塊化的設計思路,具有良好的可移植性和可擴展性.仿真案例研究表明,其仿真效果較好.下一階段,在基于混合交通流的車輛行為模型以及增強仿真系統的適應性和穩定性方面還有待作更深入的研究.
[1]Serge P H,Piet H L Bovy.State-of-the-art of vehicular traffic flow modeling[J].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2001,215(4):283-303.
[2]陸化普,李瑞敏,朱 茵.智能交能系統概論[M].北京:中國鐵道出版社,2004.
[3]陳先橋,嚴新平,初秀明.分布式交通仿真中網絡控制模型研究[J].武漢理工大學學報:交通科學與工程版,2006,30(3):292-294.
[4]鄒智軍,楊東援.城市交通仿真實驗系統的面向對象開發[J].系統仿真學報,2002(7):844-848.
[5]裴玉龍,張亞平.道路交通系統仿真[M].北京:人民交通出版社,2004.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19