配送中心AGV配置方案仿真研究*
2010-04-10 10:42:30嚴(yán)武元
嚴(yán)武元
(廣東技術(shù)師范學(xué)院管理學(xué)院 廣州 510665)
0 引 言
配送中心是現(xiàn)代物流鏈中的關(guān)鍵樞紐,其作業(yè)系統(tǒng)復(fù)雜[1].為避免在配送中心作業(yè)中浪費人力、物力和時間,系統(tǒng)仿真方法是有效的手段.系統(tǒng)仿真能讓人們直接觀察系統(tǒng)模型動態(tài)運行的效果,并可多次修改參數(shù),形成不同的資源配置方案,通過對不同方案的仿真結(jié)果的評價,可實現(xiàn)系統(tǒng)優(yōu)化.本文針對某配送中心,研究了基于Auto-Mod平臺的配送中心仿真建模技術(shù)并在其AGV配置方案的優(yōu)選方面進(jìn)行了應(yīng)用.
1 配送中心仿真建模基本內(nèi)容
配送中心作業(yè)系統(tǒng)屬于典型的隨機(jī)型離散事件系統(tǒng).離散事件系統(tǒng)仿真的一般步驟包括系統(tǒng)建模、確定仿真算法、建立仿真模型、設(shè)計仿真程序、運行仿真程序、輸出仿真結(jié)果并進(jìn)行分析[2].
2 基于AUTOMOD的配送中心仿真模型的建立
本研究采用美國Brooks automation公司研究開發(fā)的AUTOMOD作為仿真平臺.AUTOMOD目前是市面上比較成熟的3維物流仿真軟件.主要包括 AutoMod,Autostat和 Autoview三大模塊[3].
2.1 仿真原型及目標(biāo)
仿真針對某大型配送中心,該中心擁有A,B 2個大庫,A庫面積為1 200 m2,有24個通道,每個通道有2列5層貨架;B庫面積為800 m2,有16個通道,每個通道也是2列5層貨架.A,B庫每層貨架高1.5 m,寬1 m,巷道間距約4 m.該配送中心共有叉車12臺,其中高叉5臺,普叉7臺.該配送中心倉庫采用的是傳統(tǒng)式通道倉儲模式.
本次仿真的目標(biāo)是:通過模擬現(xiàn)有配送中心的運營,找出AGV的最佳配置方案.
2.2 AS/RS仿真建模
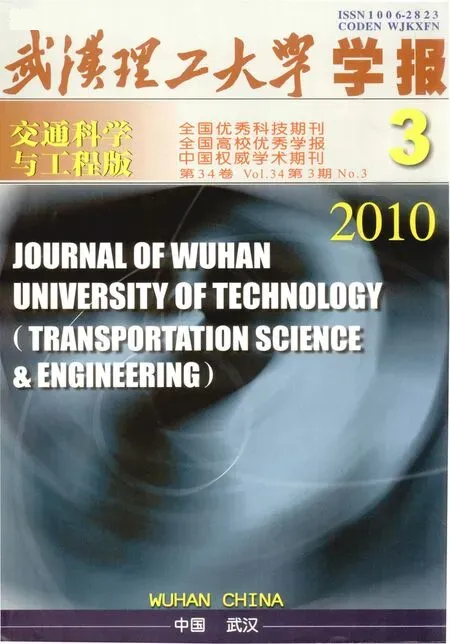
自動化立體倉庫又稱為自動存儲/自動檢索系統(tǒng)(automated storage/retrieval system,AS/RS),是用高層貨架儲存貨物,以巷道堆垛起重機(jī)存取貨物,并通過周圍的裝卸搬運設(shè)備,自動進(jìn)行出入庫存取作業(yè)的倉庫[4].本研究按作業(yè)性質(zhì)的不同,配送中心從總體上可以分成幾大功能區(qū)域:接貨區(qū)、理貨區(qū)、儲存分揀區(qū)、自動分類區(qū)、包裝區(qū)以及發(fā)貨區(qū)等.其中儲存分揀區(qū)也可稱作配送流中心的主生產(chǎn)區(qū),其余為輔助生產(chǎn)區(qū)[5-6].具體如圖1所示.
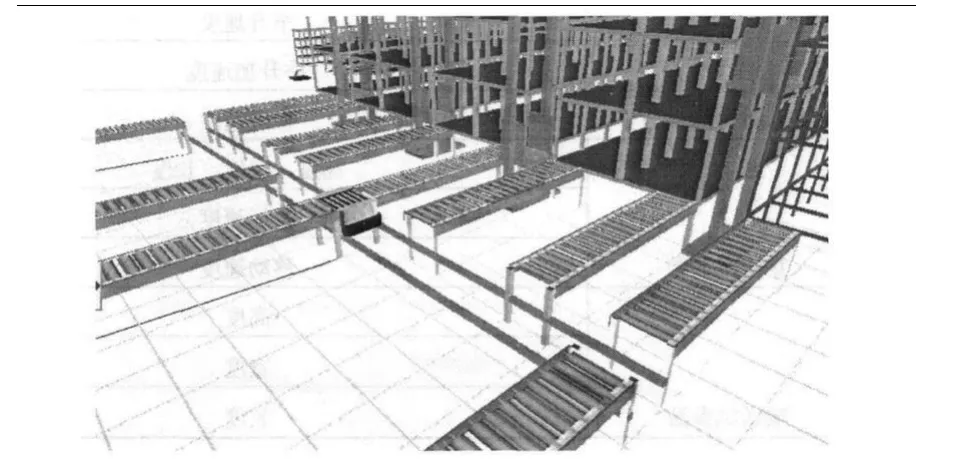
圖1 AS/RS系統(tǒng)的系統(tǒng)仿真模型立體圖
2.3 AGV運輸系統(tǒng)的仿真建模
AGV實體模型可通過模型庫調(diào)用,AGV運輸系統(tǒng)模型主要建立2類模型:線路模型、調(diào)度模型[7].
2.3.1 線路模型 通過設(shè)定路線的通行建立線路模型.
1)各類線路的仿真實現(xiàn) 采用單向路線方法,在裝卸作業(yè)站點附近才用雙向路線方法.AGV在規(guī)定的路線上只能按規(guī)定的方向行走.
2)線路共享問題 每段線路只能同時容納一輛AGV,AGV的工作在上位系統(tǒng)監(jiān)控下進(jìn)行,AGV要隨時向系統(tǒng)匯報自己的工作狀態(tài),以確定下一步將要行走的路線.
3)局部限速 在路線轉(zhuǎn)彎處,要設(shè)定線路上AGV的限速值和減速控制點來實現(xiàn).
人大預(yù)算審查監(jiān)督實現(xiàn)由程序性向?qū)嵸|(zhì)性轉(zhuǎn)變。在推進(jìn)預(yù)算審查監(jiān)督改革前,市人大及其常委會對市級預(yù)算和部門預(yù)算的審查監(jiān)督大多是程序性的,審查意見往往只涉及面上的、籠統(tǒng)的,難以落實到位。隨著改革的推進(jìn),部門預(yù)算審查監(jiān)督工作不斷深化細(xì)化,人大代表和社會公眾的意見建議在預(yù)算編制、執(zhí)行中得到了較好落實,預(yù)算編制與工作謀劃的科學(xué)化民主化程度有了較大提高,人大預(yù)算決算審查監(jiān)督工作逐步實現(xiàn)了由程序性向?qū)嵸|(zhì)性轉(zhuǎn)變。
4)路口交通管制 在線路的交匯點,通過設(shè)置“紅綠燈”對象來控制車輛遵循“先到先行”的原則.
2.3.2 AGV調(diào)度模型 通過AUTOMOD提供的接口,用戶編程來建立調(diào)度模型.
l)調(diào)度機(jī)制:調(diào)度機(jī)制根據(jù)任務(wù)指令的產(chǎn)生發(fā)送、接收管理和執(zhí)行的主體不同設(shè)為集中調(diào)度、請求服務(wù)和自主處理3種.
2)AGV的任務(wù)管理及車輛調(diào)度 當(dāng)需執(zhí)行的命令過多沒有空閑的AGV時,上位控制器應(yīng)將這些命令暫時儲存起來,然后按一定順序逐步完成,等級高的命令將會優(yōu)先執(zhí)行.上位控制器根據(jù)所需要執(zhí)行的任務(wù)和當(dāng)前AGV所處的位置優(yōu)化車輛分配和調(diào)度[8].
3)AGV的交通管理 每臺AGV的工作均在上位系統(tǒng)監(jiān)視下進(jìn)行,AGV隨時向系統(tǒng)匯報自己的工作狀態(tài),等待系統(tǒng)給出下一步將要行走的線路指令[9].若該線路己被占用,則AGV不能通行,必須等到系統(tǒng)許可后才可通行.
2.4 自動分揀系統(tǒng)仿真建模
根據(jù)該配送中心的情況,為了保證分揀的正確性,同時減少分揀時對搬運貨物的損害,在此采用基于 ASS(automated sorting system)的PAS(piece assorting system)滑塊式自動分揀系統(tǒng)[10],并對該系統(tǒng)進(jìn)行改進(jìn),在其前端引入自動拆零包裝設(shè)備,使之同時實現(xiàn)拆零包裝和分揀功能.
與此同時,為提高備貨效率,減少出錯率,縮短貨物在庫內(nèi)轉(zhuǎn)運時間,在PAS分揀系統(tǒng)后端設(shè)置揀貨系統(tǒng)(digital picking system,DPS),由叉車負(fù)責(zé)貨物從PAS分揀口到DPS貨架的運輸.
3 模型的檢驗
系統(tǒng)仿真成功的關(guān)鍵在于輸入數(shù)據(jù)的模型的準(zhǔn)確性,訂單是配送中心的仿真輸入數(shù)據(jù).在建模型之前,根據(jù)收集到的實際系統(tǒng)的數(shù)據(jù),經(jīng)過分析這些數(shù)據(jù),初步確定訂單的輸入分布為指數(shù)分布.為驗證該分布模型,根據(jù)前述的建模方法,建立該配送中心配送系統(tǒng)的仿真模型,如圖2所示.
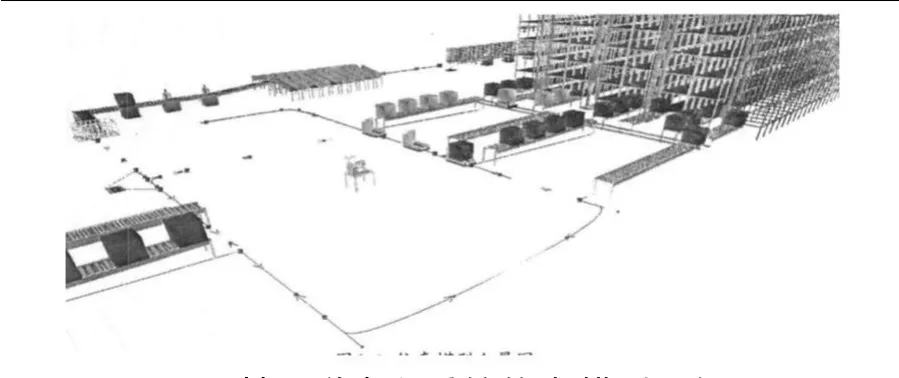
圖2 某配送中心系統(tǒng)仿真模型運行圖
運行該模型一定時間并統(tǒng)計其輸入數(shù)據(jù),得到訂單到達(dá)時間間隔的數(shù)值與出現(xiàn)次數(shù)統(tǒng)計表.進(jìn)一步處理,得到仿真中訂單到達(dá)間隔時間的概率密度函數(shù)為

將樣本直方圖與 f(x)=2.506e-2.056x擬合在一起如圖3所示,由圖可以看出所估計的指數(shù)分布與觀測樣本比較吻合,可以利用該指數(shù)分布函數(shù)進(jìn)行仿真.
圖3 輸入數(shù)據(jù)檢驗結(jié)果
4 AGV配置方案仿真及結(jié)果分析
4.1 仿真運行參數(shù)
本次仿真,重點研究討論該配送中心的兩個核心子系統(tǒng):AS/RS系統(tǒng)和AGV搬運系統(tǒng).AS/RS系統(tǒng)配置如表1所列.
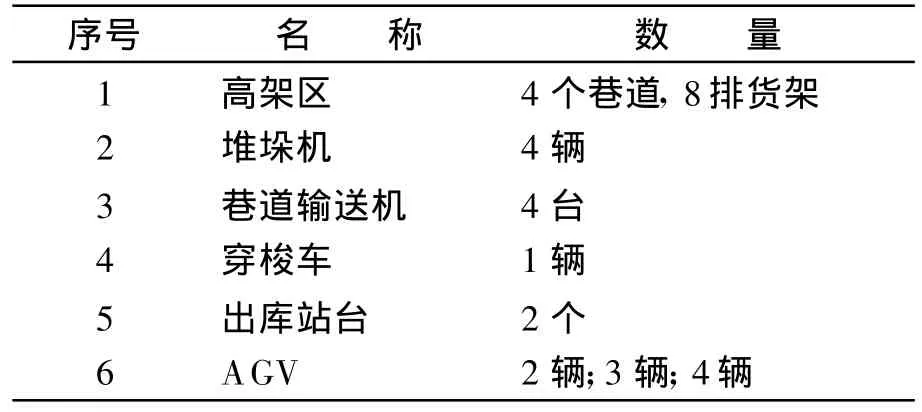
表1 AS/RS系統(tǒng)配置
設(shè)定仿真時間為16 h(57 600 s),考慮到系統(tǒng)開始運行時段,仿真系統(tǒng)初始化運行2 h(7 200 s),也就是仿真系統(tǒng)共運行18 h,2 h后開始統(tǒng)計各項數(shù)據(jù).對不同設(shè)備配置的方案,每個方案運行5次,統(tǒng)計數(shù)據(jù)取平均值.
4.2 仿真結(jié)果分析
AS/RS的仿真結(jié)果如表 2所列.3種不同AGV配置方案的仿真結(jié)果如表3~5所列.其中統(tǒng)計項目含義如下:A,執(zhí)行任務(wù)次數(shù);B,空閑率(%);C,充電時間(%);D,空行時間(%);E,負(fù)載行走時間(%);F,裝載時間(%);G,卸載時間(%);H,總負(fù)荷率(%).
由表 2可知,堆垛機(jī)的平均利用率為71.84%,穿梭車的利用率為69.18%,符合實際需要,同時留有一定的裕量.表3~5經(jīng)過相關(guān)計算,得到AGV平均利用率和任務(wù)平均響應(yīng)時間,如表6所列.對比分析表2與表6,可確定最佳AGV數(shù)量.

表2 AS/RS的仿真結(jié)果
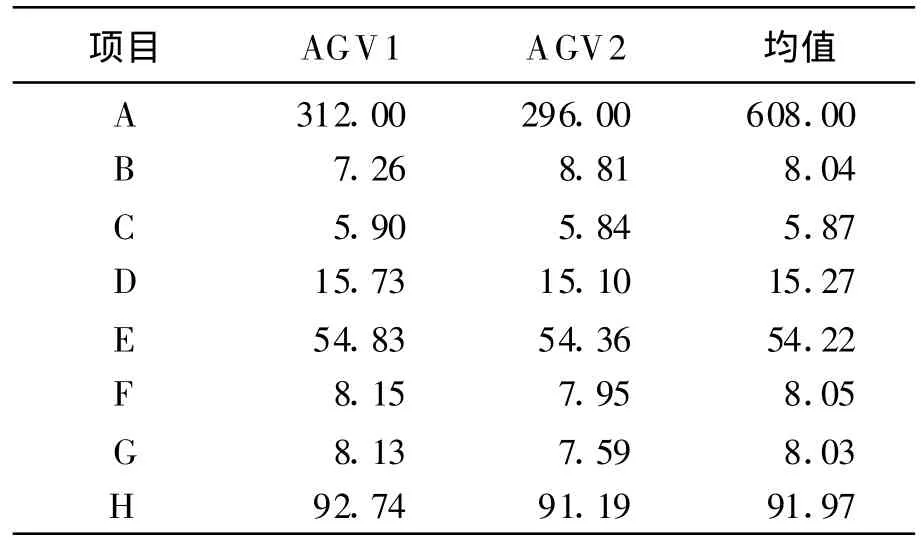
表3 方案1仿真結(jié)果
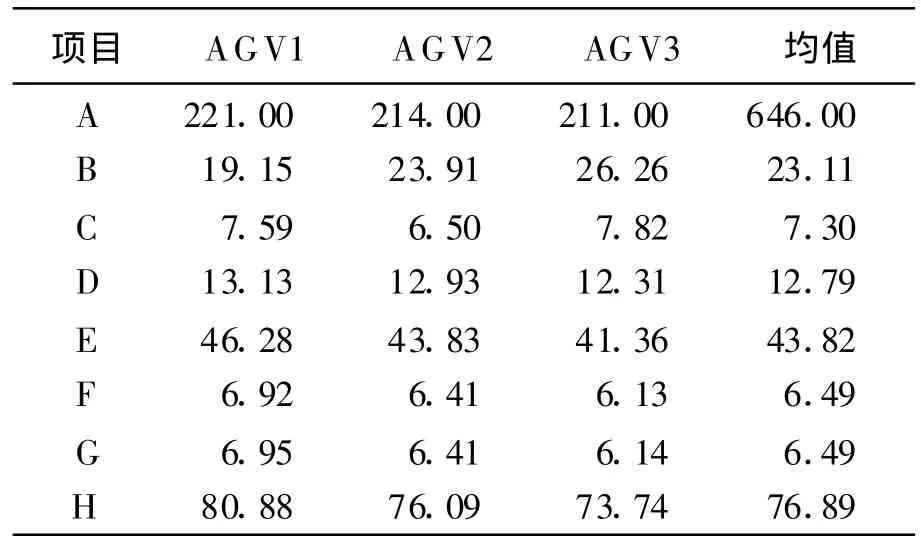
表4 方案2仿真結(jié)果
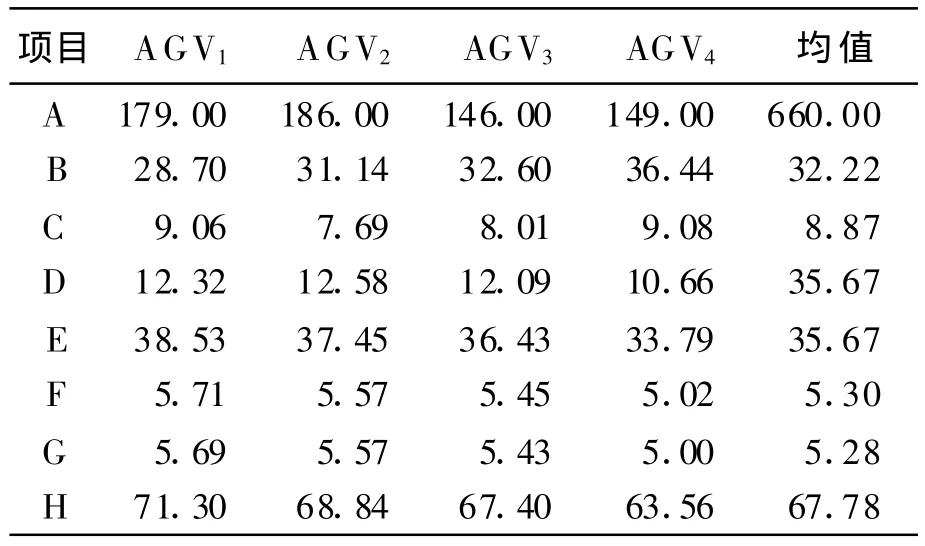
表5 方案3仿真結(jié)果
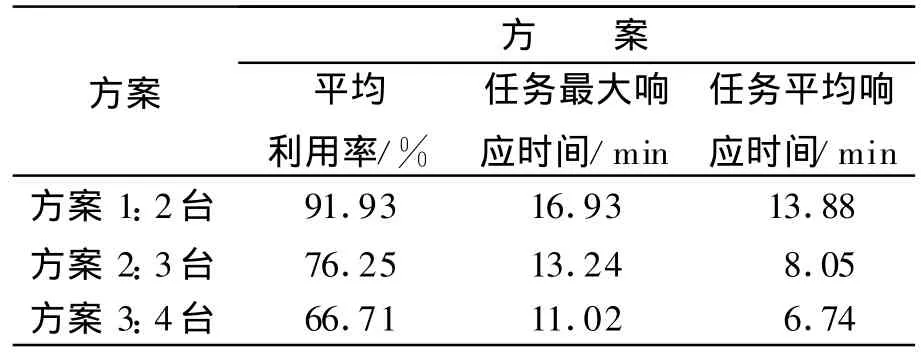
表6 AGV平均利用率和任務(wù)平均響應(yīng)時間
從仿真數(shù)據(jù)可以看出,采用2臺AGV時,在正常情況下能滿足作業(yè)要求(13.88 min<19 min),但一旦出現(xiàn)工作高峰(19.63 min>19 min),就無法滿足要求.此外,僅采用2臺AGV時,利用率超過了90%,可能會成為系統(tǒng)的瓶頸,影響下游工作.采用4臺AGV時,其作業(yè)能力遠(yuǎn)大于實際需求,考慮到AGV價格的高昂,不適宜采納此方案.采用3臺AGV時,最大響應(yīng)時間僅為13.24 min,完全能滿足系統(tǒng)工作需求,考慮到整個系統(tǒng)能力均衡,最終確定配置3臺AGV是比較理想的方案.
5 結(jié) 束 語
本文研究了基于AUTOMOD平臺的配送中心仿真建模,建立了基于AUTOMOD平臺的某配送中心仿真模型.重點研究了配送中心核心子系統(tǒng),包括典型的AS/RS倉儲系統(tǒng),AGV搬運系統(tǒng),DPS智能分揀系統(tǒng)和基于ASS的PAS自動分類系統(tǒng)等,并對輸入模型進(jìn)行了檢驗,驗證模型設(shè)計的正確性和可行性.對該配送中心的3種不同的AGV配置方案進(jìn)行了仿真,通過對仿真結(jié)果的分析,得到了最優(yōu)的AGV配置方案.這表明了應(yīng)用仿真技術(shù)解決配送中心的資源配置問題是可行的,可為決策提供支持.
在仿真系統(tǒng)在研究建立時,僅考慮理想化模型,沒有考慮人員的生理承受力,在旺季到來時可能會出現(xiàn)人手不足情況;另外,本研究僅從效率方面進(jìn)行研究,未進(jìn)行經(jīng)濟(jì)方面分析,這方面還有待深一步研究.
[1]李 暄,洪怡恬,鄭 慧,等.Flexsim系統(tǒng)仿真軟件在配送中心分揀系統(tǒng)設(shè)計中的應(yīng)用[J].物流工程與管理,2009,31(1):37-39.
[2] 張曉萍,石 偉,劉玉坤.物流系統(tǒng)仿真[M].北京:清華大學(xué)出版社,2008.
[3]Jerry Banks.Getting Started with AutoMod[M].USA:Brooks Automation,Inc.2004.
[4]Lesh N,M arks J,Mcmahon A.Exhaustive approaches to 2D rectangular perfect packings[J].Information Processing Letters,2004,90(1):7-14.
[5]耿麗梅,陳國華.物流配送中心工作流程的建模與仿真[J].物流技術(shù),2008,27(4):107-111.
[6]孫秋菊,張啟乾.配送中心揀選策略仿真研究[J].物流技術(shù),2008,27(10):85-88.
[7]馬東彥.配送中心車輛調(diào)度模型及遺傳算法設(shè)計[J].物流科技.2008,27(5):79-82.
[8]趙志彥,詹原瑞,李 波.配送中心存儲布局的一種動態(tài)調(diào)度方法[J].計算機(jī)應(yīng)用,2008,28(2):484-487.
[9]魯 立,李 浩.社會最小等待時間下的立體車庫存取優(yōu)化算法[J].武漢理工大學(xué)學(xué)報:信息與管理工程版,2009,31(5):766-769.
[10]Jane C C,Laih Y W.A clustering algorithm for item assignment in a synchronized zone order picking system[J].European Journal of Operational Research,2005,166(2):489-496.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19