六輪機器人小車的轉向特性研究*
2010-04-12 10:07:20李文鋒
武漢理工大學學報(交通科學與工程版) 2010年4期
關鍵詞:模型
金 龍 李文鋒 李 斌
(武漢理工大學物流工程學院 武漢 430063)
在汽車運動分析領域,對車輛的前輪轉向、四輪轉向已經進行了較為深入的分析[1].汽車的底盤結構均為矩形,并且多為四輪結構,對于特殊底盤結構的智能車輛并不適用,也缺乏對六輪汽車轉向性能的分析.國內外有許多關于六輪智能車輛轉向特性的研究[2-3],其底盤結構都類似于汽車底盤結構[4-5].研究方法大都基于汽車領域的前輪轉向和四輪轉向結構.其中包括差速驅動、兩輪轉向、四輪轉向以及全轉向.差速驅動的轉向主要依靠在地面滑移實現,具有不確定性.兩輪轉向和四輪轉向的實質是假設其轉向圓心位于另外不轉動車輪的軸線上,其結構類似于汽車領域的四輪轉向結構,并且有失一般性.全轉向結構是將其中的兩個車輪作為萬向輪處理,其實質也屬于汽車領域的四輪轉向范疇.對于特殊底盤結構的六輪智能車輛并未有深入的轉向特性的研究.本文以一種新型的六輪小車的底盤結構為研究對象,深入研究了六輪小車轉向系統的轉向性能.建立了小車轉向的運動學模型,并進行合理的簡化,對其動態特性進行了分析.通過改變參數,進行仿真,分析了小車行駛速度對轉向性能的影響.
1 假設條件
為了使研究方便,現對機器人小車作如下理論性假設[6-7]:(1)假設車輛行駛于平坦路面,建立小車局部坐標系XOY,O為小車的質心,X軸為小車縱向,Y為小車橫向,Z軸垂直于地面.小車沿X方向的行駛速度不變,忽略與行駛動力學相關的垂直力影響及耦合作用;(2)認為車體結構是剛性的,各部件不存在彈性變形,忽略轉向系統中的不確定因素;(3)車輛的行駛速度較慢,車速恒定,不存在慣性力,也沒有空氣阻力作用,車體轉向時不會傾翻;(4)小車始終處于平衡狀態,也即車輪轉角足夠小,從而保證車輛的運動方程為線性;(5)地面與車輪的接觸認為是剛體與剛體的接觸.車輪與地面之間的最大側向靜摩擦系數充分大,不存在側向滑動現象;(6)小車的六個車輪認為是同時協調轉向,不存在各個車輪之間的相互制約作用.
通過以上假設,本機器人小車被簡化為一個具有一個平移自由度(沿Y軸)和一個轉動自由度(繞Z軸)的線性二自由度模型.
2 小車轉向時的動力學分析
2.1 動力學模型的建立
根據假設可知,小車僅具有沿Y軸方向的平移和繞Z軸方向的轉動兩個獨立的自由度,圖1為小車的線性二自由度模型.
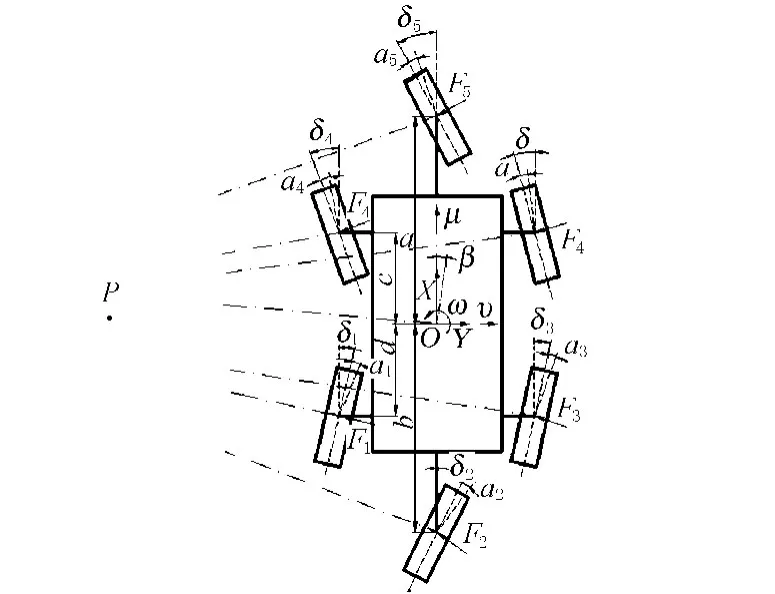
圖1 小車的線性二自由度模型
在不考慮小車的勢能和耗散能的情況下,用拉格朗日方程建立系統的動力學方程.二自由度六輪小車受到的外力沿車輛坐標系Y軸方向的合力與繞質心的力矩和為

式中:m為小車的質量;Iz為小車繞Z軸的轉動慣量.
令各車輪的側偏剛度為ki,則有,Fi=kiαi(i=1~6).由車體的結構特征有,k2=k5,k1=k3=k4=k6.
根據坐標系的規定,六個車輪的側偏角分別為
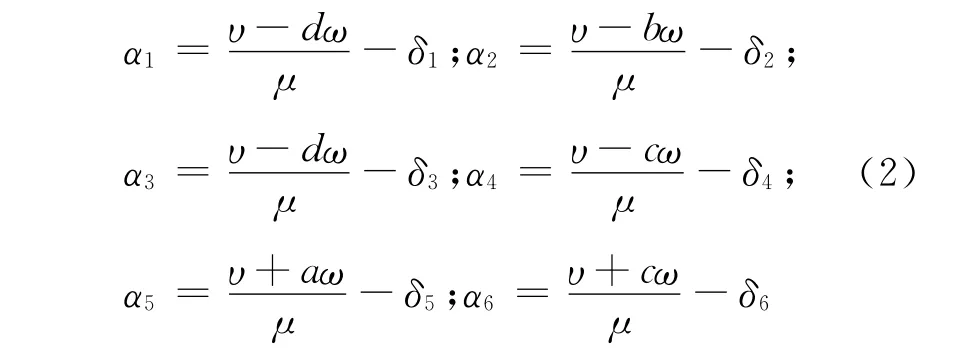
小車質心的側偏角為

又因為

將式(2)~(4)代入式(1),化簡有
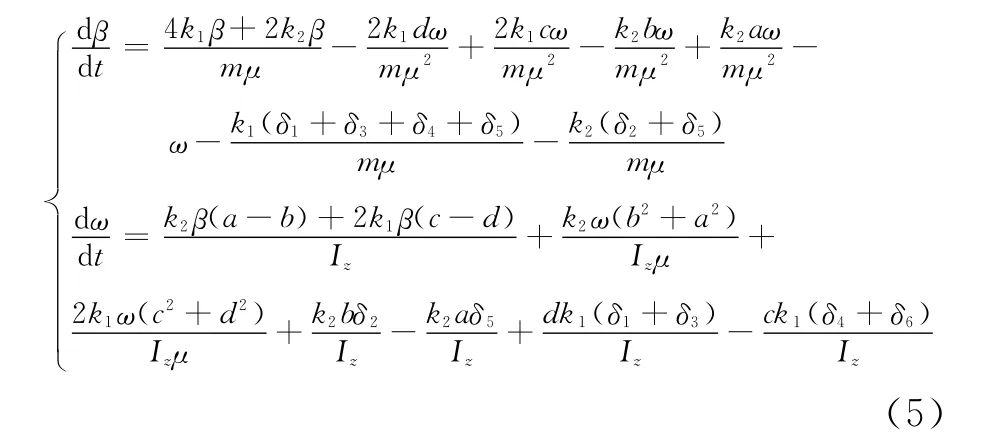
這就是該機器人小車的二自由度運動模型的微分方程.
2.2 模型理論分析
近似取車輪1,3的轉角相等,車輪4,6的轉角相等,即,δ1=δ3,δ4=δ6,并存在如下關系

式中:n1,n2,n3為車輪轉角的比例因子.
2.2.1 小車車體橫擺角速度與車輪轉角的傳遞函數 將式(5)的兩個等式進行變換,得

式中:m1,h1,c1,b1,b0分別為由 m,μ,υ,Iz,k1,k2,n1,n2,n3,a,b,c,d 所確定的表達式.
對式(6)作拉普拉斯變換,可得小車車體的橫擺角速度ω與車輪5轉角δ5的傳遞函數

式中:s為復變量.根據式(7),可以求得當車輪轉角δ5有輸入時,小車車體的橫擺角速度ω的變化情況.
2.2.2 小車質心的側偏角與車輪轉角的傳遞函數 同理,由式(5)的兩個等式變換可得

式中:m2,h2,c2,a1,a0分別為由 m,μ,υ,Iz,k1,k2,n1,n2,n3,a,b,c,d 所確定的表達式.
對式(8)作拉普拉斯變換,可得小車質心的側偏角β與車輪5的轉角δ5的傳遞函數

式中:s為復變量.根據式(9),可以求得當車輪轉角δ5有輸入時,小車質心的側偏角β的變化情況.
3 仿 真
由2.2中的兩個傳遞函數,用matlab自帶的simulink工具箱對其進行仿真[8].分析各車輪轉角成比例的六輪轉向小車的時域特性——角階躍響應特性.把各車輪的轉角均轉化成車輪5的轉角,以車輪5的轉角δ5為輸入,以小車車體的橫擺角速度ω和小車質心的側偏角β為輸出,傳遞函數如式(7)、(9).車輪5轉角的階躍信號的起躍時間為0s,幅值為0.1rad,同時以理想階躍信號施加于其余各車輪,信號起躍時間為0s,幅值為0.1n1,0.1n2和0.1n3rad.
根據線性二自由度機器人小車運動模型的控制策略,化簡式(5),得

由車體的結構特點,各車輪轉角的比例因子間近似有
聯立式(10)、(11)可以解出n1,n2和n3的值.
分別取車速:μ=0.05,0.1,0.2m/s,小車的其余參數取為a=0.8m,b=0.7m,c=d=0.5m,k1=k2=45 000N/rad,m=100kg,Iz=150kg·m2.
不同車速下小車車體的橫擺角速度ω隨時間t變化的仿真結果如圖2所示.小車質心的側偏角β隨時間t變化的仿真結果如圖3所示.
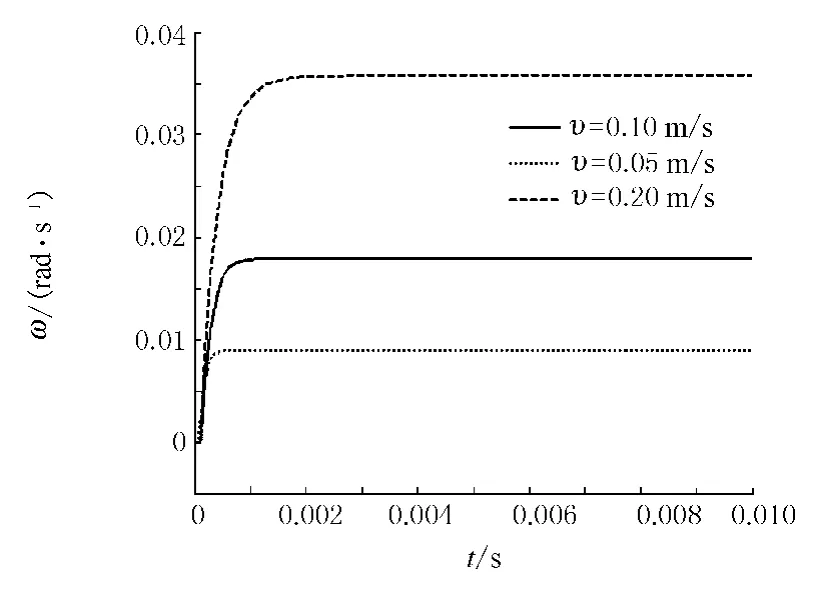
圖2 不同車速下小車車體的橫擺角速度ω隨時間t變化的仿真曲線
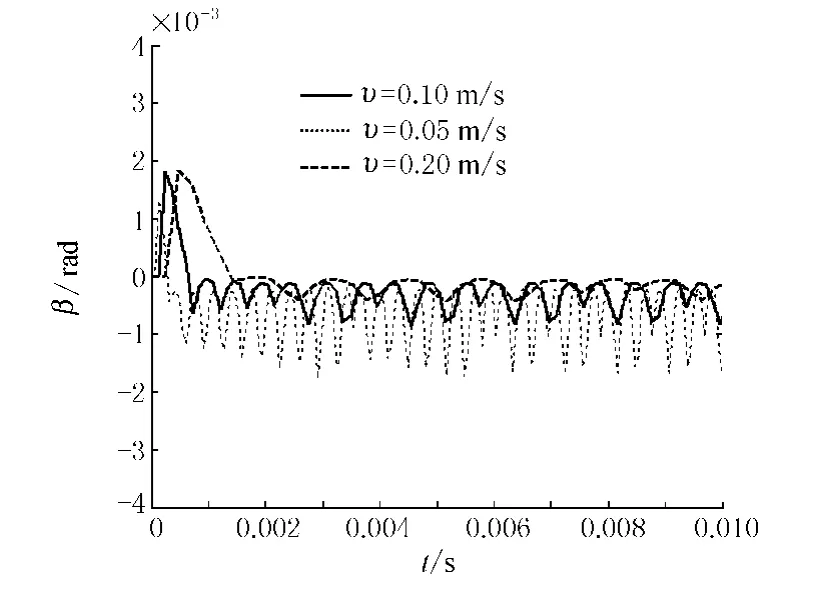
圖3 不同車速下小車質心的側偏角β隨時間t變化的仿真曲線
仿真的開始時刻,在三種速度的情況下,小車車體的橫擺角速度ω都迅速增大,然后趨于穩定.圖2中的實線、點線和虛線分別代表υ=0.1,0.05,0.2m/s時的仿真曲線.圖中υ=0.2m/s時橫擺角速度ω的穩定值最大,為0.035rad/s.υ=0.05m/s時最小,為0.009rad/s.因此,小車車體的橫擺角速度ω隨著小車縱向速度υ的增大而增大.
當小車縱向速度為υ=0.2m/s時,小車質心的側偏角β的均值最大,為-0.2×10-3rad.υ=0.05m/s時,β的均值最小,為-0.9×10-3rad,如圖3所示.圖3中三條曲線所代表的車速與圖2相同.車速越大,質心側偏角β的均值也就越大.同時,當υ=0.2m/s時β的震蕩幅度為0.4×10-3rad,υ=0.05m/s時為1.7×10-3rad.由此可以看出,小車縱向速度u越小,其質心的側偏角β的震蕩幅度就越大,說明小車轉向時的運動方向震蕩變化的越劇烈,因此小車轉向時的穩定性越差.
4 結 束 語
本文以一種特殊結構的六輪機器人小車為研究對象,通過假設條件建立了小車的線性二自由度模型,并由拉格朗日方程得出了該模型的微分方程.利用SIMULINK工具箱對該模型進行時域性仿真,得出了該六輪機器人小車的轉向特性與行駛速度的關系.增大車速,可以使小車轉向時具有更好的穩定性.但是速度的增加,會使小車轉向時的靈活性增加,不僅難以控制,甚至由于離心力的作用,還會發生傾翻.因此,小車轉向時并不是車速越小越好,而是應該根據車體質量、路面條件等因素選擇合理的的行駛速度.
[1]林 程,孟 祥,陳思忠,等.四輪轉向車輛轉向特性分析及試驗研究[J].北京理工大學學報,2004,24(3):218-221,264.
[2]王佐偉,吳宏鑫.月球探測車轉向系統動力學建模與分析仁[J].中國空間科學技術,2004(3):14-20.
[3]Nesnas I A D,Maimone M W,Das H.Rover maneuvering for autonomous vision based dexterous manipulation[C]//Proceedings of the IEEE International Conference on Robotics and Automation,San Francisco,California,March 2000.
[4]Chang Yong,Tan Dalong,Wang Hongguang,et al.Kinematics analysis of a six-wheeled mobile robot[C]//Intelligent Robots and Systems,2006IEEE/RSJ International Conference on Oct.2006:4169-4174.
[5]Deng Zongquan,Fang Haitao,Dong Yuhong,et al.Research on wheel-walking motion control of lunar rover with six cylinder-conical wheels[C]//Mechatronics and Automation,2007.ICMA 2007.International Conference on 5-8Aug.2007:388 -392.
[6]余志生.汽車理論[M].4版.北京:機械工業出版社,2006.
[7]Crolla D,喻 凡.車輛動力學及其控制[M].北京:人民交通出版社,2004.
[8]呂紅明,陳 南.基于 Matlab/Simu1ink的四輪轉向車輛操縱穩定性仿真[J].系統仿真學報,2004(16)5:957-959.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19