航空發動機高空模擬試驗進氣壓力復合控制研究
2010-05-07 03:11:34侯敏杰黃振南
燃氣渦輪試驗與研究 2010年1期
趙 涌,侯敏杰,黃振南,張 松,彭 炬
(1.中國燃氣渦輪研究院,四川 江油 621703;2.電子科技大學,四川 成都 610054)
符號表
α1 調節閥1流量系數α2 調節閥2流量系數A1MAX 調節閥1最大等效流通面積A2MAX 調節閥2最大等效流通面積CF1 調節閥1開度CF2 調節閥2開度PLA 油門桿角度
1 引言
從航空發動機高空模擬試驗進氣壓力控制的角度出發,發動機高空模擬試驗可分為狀態瞬變和穩態性能兩類。狀態瞬變試驗主要包括:彈用發動機高空起動試驗,渦噴、渦扇發動機推力瞬變試驗,渦軸發動機功率瞬變試驗。在瞬變試驗過程中發動機狀態快速變化,極大地干擾了發動機進氣壓力,使模擬狀態點發生偏離,此時只有控制系統對壓力足夠敏感,具有足夠快的調節速度,才能保證試驗結果的準確性和發動機的安全[1]。在性能試驗時,為得到準確的高空穩態性能數據,要求發動機進氣壓力“穩定不變”,此時進氣壓力控制系統必須降低對各種噪聲的敏感度,提高系統的穩定性。可見,“快”和“穩”是航空發動機高空模擬試驗進氣壓力控制系統必須同時滿足的兩個性能指標。但在過程控制中,“快”和“穩”是兩個矛盾的指標,僅通過簡單的控制算法,無法實現又“快”又“穩”的控制。單一PID控制及其改進算法,都無法實現兩者的完全分離設計,更難以實現對于各種情況的性能魯棒。此外,為滿足我國大飛機項目的研制,高空臺必須拓展其工作范圍,提高其模擬質量,大力開展大飛機動力高空模擬試驗技術的預先研究工作。因此采用更有效的控制算法,設計具有快速度和強抗干擾能力的進氣壓力控制系統,是我國高空模擬試驗的迫切要求。進氣壓力復合控制系統采用發動機狀態前饋加進氣壓力PID反饋的控制算法,根據發動機狀態變化情況對進氣壓力進行前饋補償,在提高系統動態品質的同時不影響穩態性能。
2 高空臺發動機進氣壓力調節系統
2.1 進氣壓力調節系統空氣管網原理
高空臺進氣壓力調節系統空氣管網原理如圖1所示。壓縮空氣經閥1、閥2進入穩壓器,壓力穩定后進入發動機。通過調節閥1、閥2的開度來調整其通過的空氣流量,從而控制穩壓器內總壓,使之滿足發動機高空模擬試驗對進氣壓力的要求。通過調節閥3的開度來調整其通過的空氣流量,從而控制閥1、閥2的進口壓力,減少此處壓力波動對發動機進氣壓力的干擾。
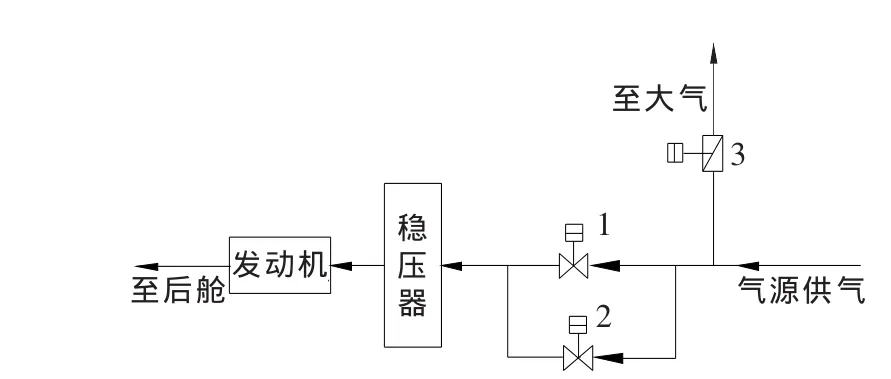
圖1 進氣壓力調節系統空氣管網簡圖Fig.1 The air piping of the inlet pressure control system
2.2 進氣壓力調節系統數學模型
在設計范圍內穩壓器中空氣流速<30 m/s,其總、靜壓差很小,因此為簡化分析可設閥1、閥2后至發動機進氣流量管前各截面總溫、總壓相等,將該部分管網等效為一容積為Vc的腔體,根據完全氣體狀態方程可得:

式中:Wa(t)可近似為
當調節閥工作在亞臨界狀態時有:
當調節閥工作在臨界、超臨界狀態時有:
式進行兩次微分后可得:

(3)式可展開成(4)式、(5)式和(6)式三種形式:
公式(4)~(6)中:k1、k2、l3、f3分別為調節閥 1 開度,調節閥2開度,油門桿角度,發動機轉速變化對進氣壓力的放大系數,l5、f5、k5分別為三種表達形式下進氣壓力的一階導數系數,這些系數與調節閥前的空氣溫度和壓力、調節閥后的壓力等因素有關;k4是未建模動態的綜合。
3 高空臺發動機進氣壓力復合控制
利用PID算法可以建立穩態精度高、魯棒性強的控制系統。根據發動機狀態變化對進氣壓力進行前饋補償可抵消發動機狀態變化對進氣壓力的干擾。由壓力PID反饋控制算法和發動機狀態變化前饋補償算法共同組成高空臺發動機進氣壓力復合控制算法[2]。
3.1 前饋補償控制分析
公式(4)~(6)給出了在小偏差情況下進氣壓力的主要干擾源和干擾放大系數,同時表明PLA、nc和Wa三個變量均可表征發動機狀態。其中PLA信號超前于發動機狀態變化,同時在現代發動機控制系統中存在供油加速度限制、溫度限制等保護限制,使得PLA不能完全表征發動機狀態(即l3與供油加速度和發動機出口溫度等參數有關,為非線性多元函數),所以根據PLA變化作前饋補償,實現復雜且容易出現補償“撲空”的現象,難以保證系統穩定。nc變化對進氣壓力的干擾與發動機節流特性、模擬高度、馬赫數等因素有關,用作前饋輸入量需要根據不同的發動機調整補償程序,此外,處于研制階段的發動機難以給出準確的發動機節流特性(即f3是與發動機節流特性、模擬狀態等因素有關的非線性多元函數),所以根據nc變化作前饋補償難以實現且使用維護工作煩瑣。
由(1)式可知,進氣壓力是前室等效腔體進氣流量與發動機進氣流量之差的積分表現,故該差值超前進氣壓力π/2相位;同時由(3)式可知,當等效腔體進氣流量不變時該差值等于發動機進氣流量的變化值,即在小偏差情況下dWa/dt比Pc超前π/2相位,故發動機進氣流量可用作表征發動機狀態對進氣壓力進行前饋補償。
用發動機空氣流量作為前饋輸入量的優點為:①發動機空氣流量的變化必然引起進氣壓力的變化,故而按發動機空氣流量變化進行前饋補償不會出現補償“撲空”現象。在前饋補償“撲空”時,前饋控制閥的動作,將使進氣壓力偏離給定值,增加系統的不穩定性。②由于前饋輸入量是實測的發動機空氣流量,故而與發動機節流特性無關,在進行不同型號發動機的各種高空模擬試驗時均可采用相同的空氣流量前饋控制算法,減少系統維護工作量。(6)式中發動機進氣流量變化對進氣壓力的放大系數為常數也證明了這一點。
其缺點為:①空氣流量由空氣流量管內某測量截面總溫、總壓、靜壓計算得到,其測量誤差、噪聲含量為三個測量參數的總和,較單一直接測量參數大。②流量測量值的變化總是滯后于真實發動機空氣流量值的變化。③由(2)式可知,Pc壓力與Wa成正比關系,如果對因Pc壓力變化而引起的Wa變化進行正作用補償,就形成了正反饋通道,正反饋將加劇Pc壓力變化使系統不穩定。
解決辦法為:①針對發動機空氣流量工程實際測量值含干擾噪聲的問題,采用發動機空氣流量部分補償代替完全補償[2]。雖然部分補償無法達到完全補償的“最優”品質,但可以有效抑制流量測量噪聲對進氣壓力的干擾。②針對發動機空氣流量測量滯后的問題,在提高測量響應速度的同時可加入(7)式,計算發動機“真實”空氣流量。③針對在建立空氣流量前饋補償通道時會附帶形成進氣壓力正反饋的問題,系統測量發動機轉速nc并將轉速的變化值Δnc作為前饋是否加入的判據,避免進氣壓力正反饋通道的形成。

3.2 復合控制策略
根據以上分析并結合系統實際,建立以調節閥1作為發動機進氣流量前饋補償控制算法輸出執行機構、調節閥2作為進氣壓力PID反饋控制算法輸出執行機構的進氣壓力復合控制系統,控制原理如圖2所示。
圖 2 中 D11(Z)、D12(Z)、D21(Z)、D22(Z)分別為調節閥1與調節閥2的位置控制模型和流量模型,D6(Z)、D3(Z)風別為前室進氣壓力模型和壓力測量模型。由D4(Z)、D11(Z)、D12(Z)和 D6(Z)構成發動機空氣流量補償前饋通道。 發動機、D4(Z)、D11(Z)、D12(Z)、D6(Z)、D3(Z)是因前饋算法而附帶形成的壓力正反饋通道。系統對Δnc(Z)進行判斷,通過開關K控制前饋是否投入,在Δnc(Z)的絕對值較小時切斷該前饋通道,避免壓力正反饋回路的形成,保證系統穩定,即僅在發動機轉速快速變化時投入空氣流量前饋算法。
4 復合控制系統試驗調試
按照3.2節的方法建立航空發動機高空模擬試驗前饋補償量可調的進氣壓力復合控制系統。鑒于高空模擬試驗的高風險、高能耗特性,本系統在開發過程中借用已有的半物理仿真平臺[4],進行了大量的飛行包線邊界點仿真試驗,調試、驗證復合控制系統的可行性和魯棒性。利用少量的調試試驗調試系統,真實檢驗系統的控制性能。
4.1 半物理仿真試驗分析[5]
利用一組控制參數對某型航空發動機在H=6 km、Ma=0.5飛行條件下進行發動機推力瞬變(相對換算轉速在5 s內由78%漸增至100%)半物理仿真試驗,結果如圖3~圖5所示。在進行半物理仿真試驗時,PLC控制系統、調節閥及操作臺為真實物理部件,空氣流量、壓力為數學模型。
由圖中可以看出,發動機空氣流量擾動0%、65%、95%補償的不同動態性能充分體現了前饋控制效率。圖5中前饋調節閥1在發動機狀態變化時快開22°,迅速補償前室空氣流量,使其進氣壓力超調量僅為PID反饋控制的1/3。從圖3~圖5還可以看出,在發動機穩態情況下其空氣流量保持不變,按空氣流量擾動補償輸出不變,調節閥1閥位不變,不同補償強度的復合控制系統具有相同的穩態性能。以上半物理仿真結果在質的方面證明:在進氣壓力控制系統中加入按空氣流量變化進行前饋補償的控制算法,在提高系統過渡態控制精度的同時,不改變其穩態控制性能。
圖3 PID反饋控制Fig.3 PID feedback control
圖4 65%前饋補償復合控制Fig.4 65%feed forward compensating compound control
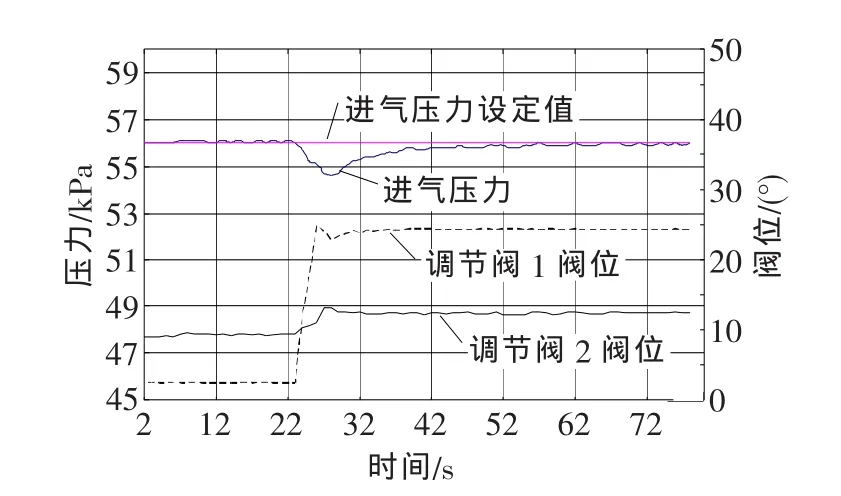
圖5 95%前饋補償復合控制Fig.5 95%feed forward compensating compound control
4.2 調試試驗分析
調試試驗時通過改變發動機模擬裝置空氣流量,模擬發動機狀態改變對發動機進氣壓力控制系統的干擾[6]。復合控制系統通過調節閥1前饋補償空氣流量的變化,以調節閥2作PID反饋控制消除系統殘差。本文以H=5.6 km、Ma=0.85飛行條件下某型發動機的推力瞬變試驗為例,發動機進氣壓力復合控制系統動態及穩態控制性能如圖6所示。
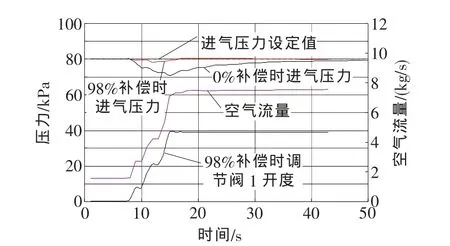
圖6 調試試驗結果Fig.6 Result of trial test
從圖中看,在空氣流量大幅度、快速度變化(6 s內由1.6 kg/s增加至7.5kg/s)干擾系統的情況下,前饋補償閥(補償量為98%)及時快速動作(閥位6 s內由0%開度增加至40%開度),系統超調量僅為2.2 kPa,調節時間<4s,穩態誤差≯±0.2kPa。0%補償時調節閥1的開度不變,超調量10.7 kPa,調節時間30 s,穩態誤差≯±0.2kPa。98%補償時的動態性能明顯優于0%補償時的動態性能,兩者具有相同的穩態性能。調試試驗利用真實、準確、可靠的試驗數據證明復合控制在提高系統動態性能的同時保證了其穩態精度。
5 結論
在飛行包線內進行的大量半物理仿真試驗證明了復合控制系統的穩定、可靠。調試試驗結果與半物理仿真試驗結果相吻合,利用精確的試驗數據有力地證明了前饋補償的有效性和半物理仿真試驗的準確性。兩種試驗方法相得益彰,充分證明了前饋補償加反饋控制的復合控制算法,使我國高空模擬試驗進氣壓力調節品質有了質的飛躍。利用復合控制算法設計的航空發動機高空模擬試驗進氣壓力調節系統,是在目前的技術能力與硬件資源條件下實現進氣壓力高品質控制的有效途徑。使用復合控制算法有效地實現了“快”和“穩”這兩個矛盾指標的分離設計。
[1]Braig W.Transient Aeroengine Testing at Stuttgart Altitude Test Facility[C]//. 14thInternational Symposium on Air Breathing Engines.Florence,Italy.ISABE 99-7074,1999.
[2]張居仁.復合控制穩定性的理論研究[J].學術研究,1984,5(5):1—8.
[3]Liu P,Zhang Q,Yang X,et al. Passivity and Optimal Control of Descriptor Biological Complex Systems[J].IEEE Transactions on Automatic Control,2008,53:122—125.
[4]謝光華.液體沖壓發動機控制系統半實物仿真[J].推進技術,2001,22(6):10—13.
[5]彭曉源.系統仿真技術[M].北京:北京航空航天大學出版社,2006.
[6]王月貴,鐘華貴,屈成澤,等.小高空臺高空模擬試驗調試[J].燃氣渦輪試驗與研究,2005,18(3):48—51.
猜你喜歡
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
石油化工自動化(2018年5期)2018-11-14 02:34:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15