電機式牽引器塑料小模數齒輪改進設計
2010-05-10 11:04:10吳云溪王紅亮
制造業自動化 2010年7期
關鍵詞:設計
吳云溪,王紅亮
(1. 廣東科學技術職業學院,廣州 510640;2. 江門市地爾電器股份有限公司,江門 529000)
0 引言
電機式牽引器主要用在波輪式套桶全自動洗衣機代替排水電磁鐵實現排水、脫水功能,以及用于移動式空調靜音排水和家用電器測試裝置的驅動部件。目前,日本中川公司、三協公司電機式牽引器技術處于國際領先,但產品價格很高。國內廠家生產的電機式牽引器質量不穩定,牽引器塑料齒輪在設計上沿用金屬齒輪的設計方法,未充分考慮模具制造及注塑工藝對齒輪參數的影響;對牽引器中的塑料小模數齒輪的嚙合狀況、小齒數根切以及齒廓優化設計沒有系統的研究,限制了齒輪參數的優化設計。
1 電機式牽引器工作原理
電機式牽引器主要由微型同步電機、動力離合器、行星輪系、動力輸出輪系、微電磁驅動器、大離合控制輪系、阻尼器、牽引鋼絲繩等組成,其傳動原理如圖1所示。
磁環輪、銅環齒輪、長嘴齒輪、中間齒輪、小扇齒輪組成大離合控制輪系,銅環對磁環輪作相對運動,切割磁力線,產生驅動扭矩,與小扇齒輪上的復位拉簧配合作用,驅動小扇齒輪,對阻尼齒輪和行星輪系的內齒圈鎖止,實現內齒圈運動的離合,從而實現動力輪系的動力傳遞與負荷復位運動傳遞的切換;離合爪齒輪與接合齒輪的離合則實現動力輪系的運動傳遞與分離的切換。電機式牽引器功能動作步驟為:電機啟動定向旋轉 → 大離合控制系統啟動 → 大離合控制系統鎖定 → 動力牽引 → 動力分離與鎖定負載 → 大離合控制系統分離 → 負載復位。
電機式牽引器的變速齒輪箱中大量使用小模數齒輪,齒輪材料采用工程塑料POM M90-04,用模塑成型方法獲得要求的形狀和尺寸。
2 塑料小模數齒輪改進設計
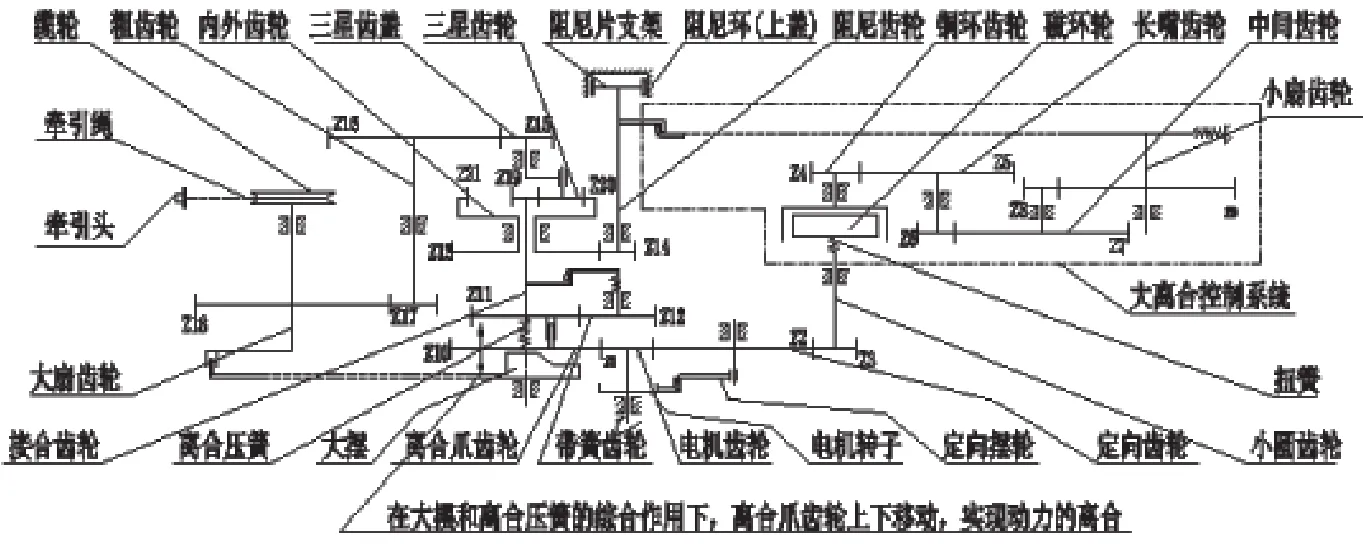
圖1 電機式牽引器傳動原理圖
塑料小模數齒輪是電機式牽引器的關鍵部件,齒輪模具的設計與制造是齒輪注塑成型生產的關鍵。采用不同的模具制造工藝,小模數齒輪的設計參數、修正方案也不同。本文采用慢走絲線切割工藝加工小模數齒輪的模具齒廓,通過對齒根過渡曲線修形,避免或減輕根切現象[1~4]。
2.1 塑料小模數齒輪參數確定
電機式牽引器中的塑料小模數齒輪采用漸開線圓柱齒輪,齒輪漸開線直角坐標圖及齒廓曲線如圖2所示。

圖2 漸開線齒輪齒廓圖
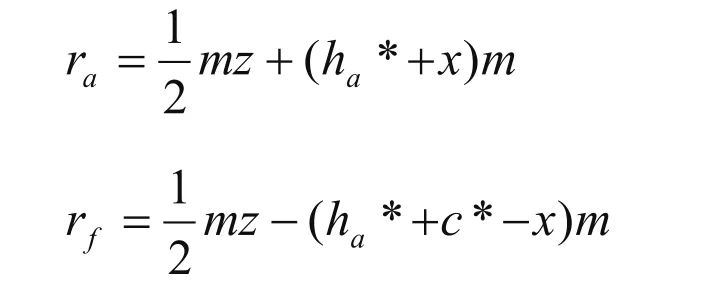
齒輪齒廓由六段曲線所構成。其中,齒根圓弧ab,半徑為rf;齒根過渡圓弧bc,半徑為ρf;過渡曲線cd;基本齒廓漸開線部分de;齒頂過渡圓弧ef,半徑為ρa;齒頂圓弧fg,半徑為ra。影響漸開線圓柱齒輪形狀和尺寸的基本參數為模數m、齒數z、分度圓壓力角α、變位系數χ、齒頂高系數
ha
*、頂隙系數c*、分度圓螺旋角β。齒輪齒廓各段曲線的數學模型分別為[5,6]:
1) 齒頂圓弧與齒根圓弧的數學模型
2)齒頂過渡圓弧與齒根過渡圓弧是適應線切割加工工藝而設置的,其最小曲率半徑取決于線切割加工所用的電極銅絲直徑、火花間隙、走刀次數等工藝條件。
3)采用圓心到漸開線開始點的連接射線作為過渡曲線,它在漸開線的起始點與漸開線相切過渡,有利于減小應力集中;還可以通過有限元強度分析和嚙合仿真作進一步的修正。
4)漸開線的直角坐標參數方程
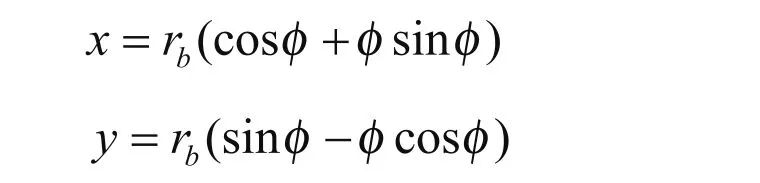
式中,rb為基圓半徑;φ為參變量,是壓力角α與展角θ之和。
5)變位齒輪的造型,是由分度圓半弧齒厚(夾角)來確定變位量的。
分度圓弧齒厚s=πm/2+2xmtanα
分度圓半弧齒厚夾角

電機式牽引器塑料小模數齒輪采用NGW型行星周轉齒輪系,按無側隙嚙合設計初步試算齒輪參數,利用VB編寫齒輪參數設計軟件,基本齒形參數計算為: 壓力角α=20°,模數m=0.4,齒頂高系數ha*=1.0,頂隙系數c*=0.35,螺旋角β=0°。
2.2 齒廓造型參數修正
在齒輪批量生產中,由于收縮的不一致,存在一定的尺寸偏差:齒頂圓直徑da的變動量達0.10mm,中心距a的變動量達0.08mm,公法線長度Wk變動量達0.06mm,齒輪偏心量達0.07mm,由于注射壓力、鎖模力等注射工藝波動造成齒廓毛邊達0.06mm。
2.2.1 中心距和變位系數的修正
為防止齒頂干涉,將中心距a進行適當修正;為防止齒側干涉,將公法線長度Wk、變位系數x作適當修正。
牽引器的輕載高速組齒輪,輕微的干涉將導致噪聲甚至降低牽引扭矩,過大的間隙則降低重合度并產生噪聲、齒輪強度亦降低。其模數m取0.4~0.45,在無側隙嚙合設計計算的基礎上,將中心距增加量Δa=(0.15~0.25)m,小齒輪的公法線長度減小量ΔWk=-0.0425mm,大齒輪的公法線長度減小量ΔWk=-0.045mm 。
大離合控制輪系的驅動力和負荷小,重合度可以適當降低,從注塑批量生產適應能力考慮,在無側隙嚙合設計中心距保持不變的基礎上,模數m由0.4改為0.48,允許較深的根切;齒廓造型所用的中心距增加量Δa=(0.2~0.3)m;小齒輪公法線長度減小量ΔWk=-(0.0425~0.0445)mm,大齒輪公法線長度減小量ΔWk=-(0.045~0.05)mm。
動力輸出低速組齒輪負荷較大,輪齒強度成為動力輸出組齒輪設計的重點。為了減小或消除根切,提高輪齒抗彎強度,變位系數應取較大的正變位,模數m取0.6,中心距的增加量Δa=(0.15~0.2)m,小齒輪的公法線長度減小量ΔWk=-0.0425mm,大齒輪的公法線長度減小量ΔWk=-0.045mm。
最后一級輸出齒輪,其負荷最大,達到0.612N.m,在靜載超載試驗中,施加的負荷扭矩達到2.04N.m,徑向力200N。該級齒輪容易克服嚙合阻力,無需增加側隙,而要求適當增加齒根厚度。該對齒輪參數設計為:頂隙系數c*=0.25,齒根過渡圓角ρf=0.5m,小齒輪變位系數x=0.5,齒頂過渡圓角ρa=0.13mm。

2.2.2 齒頂圓、齒根圓直徑的修正
2.2.3 齒頂、齒根過渡圓弧半徑的設計
齒頂、齒根過渡圓弧是適應線切割加工工藝而設置的,其最小曲率半徑取決于線切割加工所用的電極銅絲直徑d、火花間隙、走刀次數等工藝條件。為了保證足夠的重合度和齒頂厚度,應盡量減小齒頂過渡圓弧半徑,同時應滿足條件:
按照GB2362-90規定的小模數齒輪齒廓基本參數,齒根過渡圓弧半徑ρf≤0.2m[5]。為了保證輪齒齒根抗彎強度,在確保不發生過渡曲線干涉的情況下,應加大ρf的取值,且須滿足線切割工藝限制條件。
電機式牽引器塑料小模數齒輪行星輪系設計參數如表1所示。
2.3 塑料小模數齒輪的強度分析
洗衣機的減速離合器和排水閥是電機式牽引器的目標負載,以目前最大洗滌容量洗衣機的減速離合器為最大負荷,目標負載確定為50N,牽引行程≥18mm,復位力≤8N[6]。在電機式牽引器的研制過程中,初始設計的阻尼齒輪的輪齒強度不足,出現輪齒折斷失效現象,如圖3所示。

圖3 輪齒折斷失效圖
改進設計中,頂隙由0.35m修改為0.25m,將嚙合中心距加大0.15m,齒頂圓角R0.13mm,以消除齒輪嚙合干涉現象。國家標準推薦及改進設計前后阻尼齒輪的齒廓造型參數如表所示,齒輪材料拉伸彈性模量2800Mpa,壓縮比1.9,泊松比0.35,密度1.42g/cm3。
取阻尼齒輪三個齒進行有限元分析,輪齒采用Solid92三維10節點四面體結構實體單元,將生成的單齒模型數據導入到ANSYS中,并對其進行旋轉復制等操作,把單齒模型拓展為三齒有限元網格模型[7~9],如圖4所示。阻尼直齒輪無軸向載荷,法向載荷11.7N,均勻分布在直齒圓柱小齒輪節點上,每個節點力為法向載荷除以節點數目。圖5為優化設計的應力等值線圖。
應力等值線圖顯示,接觸線上具有最大負應力,即最大壓應力,這是由于加載到接觸線上的節點所致,根據材料力學的最大拉應力強度理論,這部分壓應力不是造成輪齒折斷的根本原因。齒根處的節點具有最大正應力,即最大拉應力,是導致輪齒折斷的真正原因。

表2 阻尼齒輪的齒廓造型優化設計參數對照表
按國標推薦設計,最大拉應力在齒根上編號為5183節點處,達158MPa,遠超過齒輪材料POM的許用極限應力值104MPa。在初始設計中,最大拉應力在齒根上編號為2818節點處,達112.6 MPa,超過材料的許用極限應力值的8%。優化設計后,最大拉應力在齒根上編號為2029節點處,為67 MPa,齒根應力顯著下降。
圖4 齒輪整體模型的網格劃分圖
圖5 優化設計阻尼齒輪的應力等值線圖
3 結論
本文提供了電機式牽引器總體結構設計原理,根據慢走絲線切割模具制造工藝和塑料注射成型工藝的特點,給出了相應的齒廓造型參數的設計修正原則和齒輪過渡圓角的設計原則,在齒輪參數和結構尺寸不變的條件下,對齒廓過渡曲線修形,應用有限元分析方法進行齒輪強度優化設計,提高輪齒抗彎曲強度。改進后的電機式牽引器產品噪聲至50dB(A)以下、使用壽命50000次以上,在155V低電壓下仍然能牽引60N負載正常工作。該產品的國產化,降低了家電產品的成本,帶來顯著經濟效益。
[1] 陳霞,汪嬌,夏巨諶,等. 直齒圓錐齒輪修形仿真[J].機械科學與技術,2009,3.
[2] 樊志敏,朱東華.圓柱齒輪嚙合干涉及根切的分析研究[J].機械設計與制造.2003,4.
[3] Wang JD,Howard IM. Er-ror analysis on finite element modeling of involute spur gears [J].Journal of Mechanical Design,2006,128:90-97
[4] Wang J,Howard I. The torsional stiffness of involute spur gears[A].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science [C].2004,218(1):131-142.
[5] GB2362-90 小模數漸開線圓柱齒輪基本齒廓[S].
[6] GB/T4288-2003.家用電動洗衣機[S].
[7] 高海龍,吳曉,李振華,等.柔性齒輪的多體動力學仿真方法研究[J].制造業自動化,2009,10.
[8] 李永祥,畢曉勤,等.基于ANSYS的直齒面齒輪的承載接觸分析[J].機械科學與技術,2009,7.
[9] Mujber T S,Szecsi T, Hashmi M S J. Virtual reality applications in manufacturing process simulation[J]. Journal of Materials Processing Technology,2004,155-156:1834-1838.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
