立體車庫無線數據采集系統的設計
2010-05-10 11:04:02周雪松許立瑾馬幼捷張海濤
制造業自動化 2010年7期
關鍵詞:單片機
周雪松,許立瑾,馬幼捷,張海濤,田 密,齊 鳴
(天津理工大學,天津 300384)
0 引言
立體車庫作為解決城市停車難的有效手段之一,在其電氣控制系統中主要采用以可編程控制器(PLC)為主要核心,其信號之間采用有線通信的方式進行傳輸。有線通信布線多且比較復雜,在車板移動的過程中,線纜由于被拖拽很容易發生斷裂,這樣中斷了信號之間的傳輸。又由于數據的無線傳輸方式適用于不易布線或或環境比較惡劣的情況,其應用也十分廣泛,已成功應用于小區門禁系統,抄表系統,水質監測,勘探及生產的監測等多個領域,技術相對成熟。在立體車庫中,為了實現信號之間的有效傳輸,考慮應用無線技術。但到目前為止,在國內外的研究中將無線數據采集技術應用于立體車庫中并不多見。因而本文提出了一種基于DSP和nRF905模塊的立體車庫無線數據采集系統的設計。
1 系統總體結構設計
該立體車庫無線數據采集系統框圖如圖1所示,其由立體車庫傳感器信號單元、數據采集與無線收發單元、無線收發與中央處理單元組成。其系統采用主從分布式的組成結構,由一臺主機(DSP)、多個從機(微控制器)和同等數量的無線收發模塊組成。主機作為系統的控制中心,它控制整個系統的運行。從機用來采集現場的數據及向主機發送采集到的數據。無線收發模塊則用來實現主機與從機的無線通信。
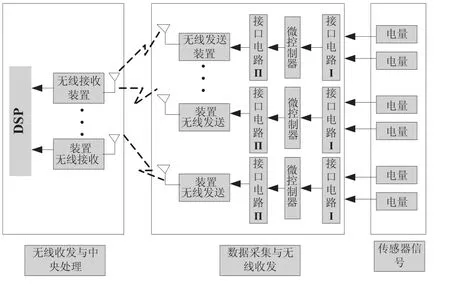
圖1 總體結構設計圖
2 系統硬件設計
2.1 傳感器信號
立體車庫傳感器信號單元包括限位開關、極限開關和光電開關,其輸出信號全為數字量。
2.2 數據采集與無線收發單元
立體車庫的數據采集與無線收發單元由微控制器和無線收發模塊組成。
2.2.1 芯片的選擇
1)微控制器的選擇。我們選用的是Atmel公司的AT89C51單片機,它是一種低功耗、高性能的、片內含有4KB Flash ROM 的8位CMOS單片機,工作電壓范圍為2.7~6V(實際使用+5V供電,8位數據總線。它有一個可編程的全雙工串行通信接口,能同時進行串行發送和接收。通過RXD引腳(串行數據接收端)和TXD引腳(串行數據發送端)與外界進行通信。
2)無線收發模塊的選擇。我們選用的是挪威Nordic VLSI 公司推出的nRF905無線收發一體的芯片,工作電壓為1.9~3.6 V ,32引腳QFN 封裝(5 mm×5 mm) ,工作于433/ 868/915 MHz 三個ISM(工業、科學和醫學) 頻道,頻道之間的轉換時間小于650μs。nRF905 由頻率合成器、接收解調器、功率放大器、晶體振蕩器和調制器組成,不需外加聲表面濾波器。使用SPI 接口與微控制器通信,Shock Burst工作模式,自動處理字頭和CRC(循環冗余碼校驗) ,配置非常方便。此外,其功耗非常低,以- 10dBm的輸出功率發射時電流只有11mA ,工作于接收模式時的電流為12.5mA ,內建空閑模式與關機模式,易于實現節能。
2.2.2 無線收發模塊的工作模式
nRF905 有兩種工作模式和兩種節能模式。兩種工作模式分別是Shock Burst接收模式和Shock Burst發送模式;兩種節能模式分別是關機模式和空閑模式。nRF905的工作模式由TRX_CE、TX_EN 和PWR_UP 三個引腳決定,(0代表低電平,1代表高電平,X代表高電平或低電平任意狀態),詳見表1。
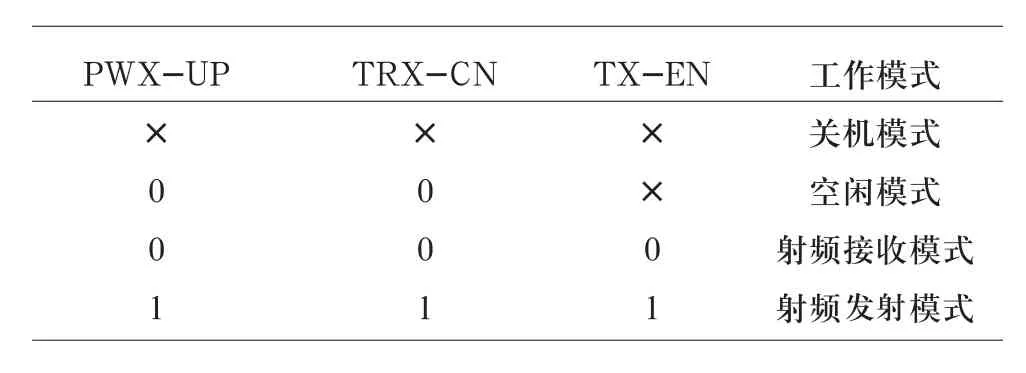
表1 nRF905工作模式
2.2.3 硬件電路設計
1)接口電路的設計。此接口電路是指立體車庫傳感器信號和AT89C51單片機之間的接口。輸出信號為4-20mA的傳感器,一般輸出負載阻抗是200--250歐姆(最大不超過400歐姆),如以200歐姆計算,電壓變化范圍就是0.8v~4v,而AT89C51單片機的工作電壓為+5V,所以傳感器和單片機需要進行電平的轉換。
2)SPI接口電路的設計。無線收發模塊nRF905使用SPI接口與AT89C51單片機進行通信,如圖2所示。

圖2 nRF905與AT89C51通信圖
2.3 無線收發與中央處理單元
無線收發與中央處理單元由無線收發模塊nRF905和數字信號處理器(DSP)組成。
2.3.1 芯片的選擇
我們選用的中央處理器是T I公司的TMS320F2812 DSP芯片,其具有面向控制的32位定點,主頻150MHz,具有豐富的片上外設,尤其是12位分辨率的A/D轉換模塊和脈沖輸出的PWM模塊,以及強大的數據處理能力。
2.3.2 硬件電路設計
此接口電路主要實現無線收發模塊nRF905與DSP之間的電平轉換。(DSP的工作電壓為+3.3V,而nRF905的輸出信號為+5V電平)。其由去耦電路、電平轉換電路和濾波電路組成,如圖3所示。
3 系統軟件設計
3.1 無線發送系統程序設計
發送端的單片機將接收機的地址和要發送的數據寫完后,就要控制nRF905 模塊將數據信息發送出去,nRF905 模塊在發送模式時會自動產生字頭和CRC 校驗碼。當發送過程結束后,nRF905模塊的數據傳輸完成管腳會通知單片機數據發送完畢。
下面為典型的nRF905 模塊數據發送流程:
1)當微控制器要發送數據時,將接收機的地址和發送數據通過SPI 接口傳輸給nRF905 模塊;
2)微控制器設置TRX_CE 和TX_EN 管腳同時置為高電平,啟動發送端的nRF905 模塊為發送模式;
3)發送端的nRF905 模塊發送過程處理:
(1)射頻寄存器開啟;
(2)數據打包(加字頭和CRC 校驗碼);
(3)數據包發送;
(4)當數據包發送結束,將數據發送完成管腳(DR 管腳)置為高電平;
4)如果AUTO_RETRAN 被設置為高,nRF905 模塊將連續地發送數據包,直到TRX_CE被設置為低;
5)TRX_CE 被設置為低時,nRF905 模塊數據包發送過程結束并回到待機模式。
3.2 無線接收系統程序設計
接收端的單片機控制nRF905 模塊進入接收模式后,當nRF905 模塊監測到有同一頻段的載波信號且接收到相匹配的地址時,就開始數據包接收。當數據包正確接收完畢后,接收端的單片機在nRF905 模塊處于待機狀態時通過SPI 接口提取數據包中的有效接收數據。
下面為典型的nRF905 模塊數據接收流程:1)微控制器控制TRX_CE 為高電平、TX_EN為低電平,nRF905 模塊進入接收模式;
2)650us 后,nRF905 模塊監測空中的信息,等待接收數據;
3)當nRF905 模塊檢測到與接收頻率相同的載波時,設置載波檢測管腳(CD 管腳)為高電平;
4)當nRF905 模塊接收到有效的地址時,設置地址匹配管腳(AM 管腳)為高電平;
5)當一個正確的數據包接收完畢后,nRF905模塊自動去掉數據包的字頭、地址和CRC 校驗碼,然后將數據接受完成管腳置為高電平;
6)微控制器將TRX_CE 設置為低電平;
7)微控制器通過SPI 接口以一定的速率提取數據包中的有效接收數據;
8)當所有的有效數據接收完畢,微控制器控制nRF905模塊數據接收完成管腳(DR 管腳)和地址匹配管腳(AM管腳)為低電平;
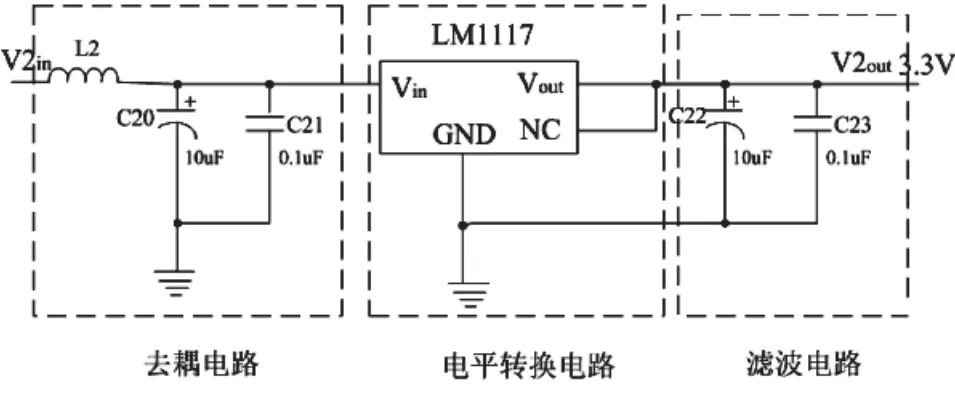
圖3 接口電路圖
9)nRF905 進入待機模式。
4 結束語
本文將DSP芯片和無線收發模塊nRF905應用于立體車庫的數據采集系統中,在國內外的研究中并不多見。其創新點在于:1)最大程度地避免了車位在運動過程中由于拖拽電纜而造成電纜的損壞的情況,有效地保證了信號之間的傳輸;2)將DSP芯片取代PLC作為立體車庫采集系統的中央處理單元,在采集的速度和精度上較PLC都有很大的提高,從而增強了車位運行的可靠性與穩定性,保證立體車庫系統安全運行。鑒于此,筆者認為基于DSP和nRF905模塊的立體車庫無線數據采集系統將對研究該方向的工程技術人員有很大的借鑒意義。
[1] 馬金祥,何一鳴.基于nRF905模塊的AT89S單片機無線收發系統設計[J].通信技術,2009,(02):36-38.
[2] 周雪松,田密,馬幼捷,等.智能化立體車庫存取車優化控制策略的研究[J].制造業自動化, 2008,(10):29.
[3] 胡國寧.PLC在多層升降橫移類立體停車設備設計中的應用[J].制造業自動化,2008,(01):72-73.
[4] 楊光松.基于nRF905的無線溫度數據采集系統[J].微計算機信息,2008(06):58-60.
[5] 馬幼捷,張海濤,邵寶福,等.電子智能化立體車庫的研究現狀與走向[J].電氣自動化,2008(05):15.
[6] 李洪濤,黃甫堪,王展,等.AT89C51單片機在無線數據傳輸中的應用[J].單片機與嵌入式系統應用,2003(06):58-60.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
