基于農田環境的無線傳感器網絡節點部署分析
2010-05-30 07:59:10沈明霞孫玉文馬奉先林相澤熊迎軍
浙江農業科學 2010年3期
周 良,沈明霞,孫玉文,馬奉先,林相澤,熊迎軍
(1.南京農業大學 工學院,江蘇 南京 210031;2.南京理工大學 自動化學院,江蘇 南京 210094)
無線傳感器網絡可實時監測、采集網絡分布區域中的對象信息,將其應用于農田范圍內,能有效提取農田環境信息。因此將無線傳感器網絡應用于農業領域[1-10]引起了越來越多學者的關注,目前將嵌入式技術與無線傳感器網絡結合應用于農業信息監測領域的研究取得了良好的效果。但是,在農田中無線傳感器網絡的實際部署中還存在一些問題,在節點部署過程中需確定節點間的有效傳輸距離,因此需考慮影響其發生變化的相關因素。
我們基于無線傳感器網絡與嵌入式技術,設計了嵌入式農田信息監測系統。重點分析了農田中無線傳感器節點的部署,確定節點的有效傳輸距離范圍,得出所需部署最優節點個數與監測農田面積之間的關系,實現了農田環境信息的周期性采集及實時查詢。
1 系統軟硬件設計
監測系統主要由農田中的無線傳感器節點以及嵌入式移動終端組成。由于所監測對象為農田環境,單個傳感器節點設計時,選擇空氣的溫濕度、土壤水分、土壤pH值以及光照強度等傳感器,用于監測農田相關信息。傳感器采集的信息通過無線傳感器網絡發送到移動終端。
嵌入式移動終端主要由 ARM9微處理器、ZigBee以及GPS等模塊組成。其中,ARM9微處理器用于對采集數據進行分析處理,ZigBee可組建適用于大范圍農田的Mesh網絡,GPS模塊用于對系統所監測區域及部署的傳感器節點進行精確定位。
系統通信軟件選擇ZigBee2006協議棧,用于無線傳感器網絡的組建以及傳感器節點的數據采集與傳輸。我們采用2種方式對農田數據進行采集:一種為定時采集,即設定一定周期,傳感器節點在每個周期內完成數據的采集與傳輸;另一種為查詢采集,即當接收到網關的相應命令時,傳感器節點完成對農田信息的采集與傳輸。
系統界面軟件選擇QT,用于實時顯示部署在農田中監測點采集的環境信息,同時繪制出數據隨時間變化的相應曲線;動態顯示整個嵌入式無線傳感器網絡的實時狀態模擬圖,以對系統進行實時監控。
2 網絡節點部署
無線傳感器節點的部署與選擇的部署方式、節點間的有效傳輸距離、所監測區域的面積有關,因此,通過分別分析節點間的有效傳輸距離及所監測的農田區域面積,最終得到部署在農田中的節點個數以及部署方案。
由于受到作物周邊環境以及其長勢的影響,當傳感器節點在農田中所放位置距離地面高度不同,節點的電池電壓不同,節點的RSSI值將受到一定的影響,節點信息的有效傳輸距離也有所不同。由于節點硬件結構已經確定,受節點天線增益、通信速率的影響較小,同時農田周邊環境較為空曠,無基站、高壓電塔等信號干擾,且農田地勢起伏不大,為了使傳感器網絡進行部署更加經濟合理,分析農田無線傳感器網絡中RSSI值與有效距離之間的關系非常必要。
利用江蘇省洪澤湖農場農科所的一塊四邊形麥田進行了試驗。由于電池電壓的大小,節點放置的高度不同,都將影響到節點間的有效通信,因此選擇分析節點放置高度、電池電壓、接收信號強度以及傳輸距離之間的關系,得出進行試驗的最佳有效傳輸距離。本系統試驗所選擇的傳感器節點由2節電池進行供電,因此標準電壓為3 V時,通過試驗得到傳感器節點放置高度與有效傳輸距離的關系。
由圖1中可得出,當節點位于地面時,節點的有效傳輸距離大約為20 m,且節點的有效傳輸距離隨著節點高度的增加而相應增加。但在農田中部署節點時,將節點放置過高不符合實際。因此,結合小麥的高度,將傳感器節點放置距離地面大約1 m處。選擇幾個典型的電池電壓值和傳輸距離,測得節點間的RSSI值,如表1所示。
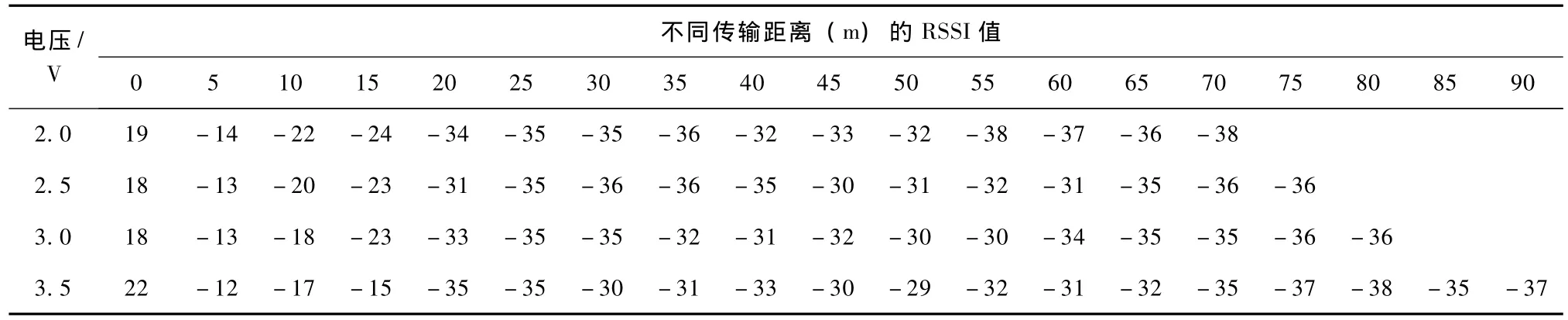
表1 RSSI值與距離、電池電壓之間的關系
在各種典型的電池電壓條件下,隨著傳輸距離的增加,RSSI的值均相應減小,特別是傳輸距離在前0~20 m的區間時,RSSI值下落趨勢十分明顯;傳輸距離從20 m到有效傳輸距離區間內,RSSI值沒有大幅度明顯變化;在節點正常工作電壓范圍內,電池電壓值越高有效傳輸距離會越大。
根據試驗結果 (表1),綜合考慮節點電壓、RSSI、有效傳輸距離等因素,可為優化節點拓撲結構、節省節點能量、提高數據傳輸質量等提供參考。
為了確定在一定區域內所需部署的傳感器節點個數,需要先確定節點間的有效傳輸距離,通過以上分析,當節點位于麥田中,距離地面高度1 m處,傳輸距離為40~60 m,節點間的RSSI值較為穩定,因此,選擇有效傳輸距離50 m進行試驗,進一步分析部署節點個數與監測區域面積之間的關系。
2.2 試驗農田區域面積的計算
試驗過程中,通過移動終端中的GPS模塊測出試驗麥田4個頂點的經緯度坐標如表2所示。

表2 試驗農田頂點對應的經緯度坐標
根據所測得4個頂點的經度L,緯度B及其大地坐標 (L,B),利用高斯-克呂格投影[11]即可將大地坐標轉換為高斯平面坐標 (x,y),進而計算出所測農田區域的長、寬以及面積。
利用高斯-克呂格投影計算公式,計算出試驗所用江蘇省洪澤湖農場農科所的四邊形麥田的長為534.457 7m,寬為247.707 9m,面積為132 389.4 m2。
2.3 農田中傳感器節點的部署
為了達到對目標區域進行全覆蓋條件下,部署在區域中的傳感器節點個數最少,選擇蜂窩網格部署方式[12]對節點進行部署。將傳感器節點安全有效地布置在農田范圍內,根據所求得的農田區域相關信息計算出需部署在農田中傳感器節點的個數。
根據本文2.1中分析的RSSI值與節點間傳輸距離之間的關系,進行試驗所選擇的節點間有效傳輸距離為50 m。圖2所示為蜂窩網格節點部署結構。

圖2 蜂窩網格節點的部署結構
在所需覆蓋面積的區域中,部署傳感器節點的個數與其長和寬都有關系,可得到所監測農田區域的寬度w與有效傳輸距離d以及長度l與節點覆蓋范圍正六邊形邊長a之間的關系:n1=2w/d,n2=(2l/a+1)/3。
將 n1與 n2的值轉換后得 [n1]、[n2],其中[n1]、[n2]表示對 n1、n2取整。在蜂窩網格中,監測區域的長與寬發生相應變化時,部署在區域中的節點個數也隨之發生變化,可得布置在農田中的最優節點個數n與 [n1]、[n2]之間的關系,即n與長l、寬w之間的關系:n=([n1] +1)([n2]-1)/2([n1]為偶數,[n2]為奇數),n=[n2] ([n1] +1)/2([n1]、[n2]為其它情況)。
根據計算得到的傳感器節點的個數n,即可得到n個節點所能覆蓋的最大面積:s=d[n1]/2(3 [n2] -1)/2。
任意選取多組數據對以上公式進行驗證,得到如表3所示結果。

表3 公式的驗證結果
通過隨機選擇多組數據,分別利用公式計算出n與s的值,結果表明,計算值與實際測量值近似或相等。因此,通過以上分析可得出結論:利用蜂窩網格方式在一定面積的矩形區域內部署傳感器節點,根據監測區域4個頂點的經緯度坐標,即可計算出對監測區域實現完全覆蓋所需布置的無線傳感器節點的個數n,以及 n個傳感器節點所能覆蓋區域的最大面積。
3 系統實現
利用2.2節中的計算結果,將試驗所監測農田長與寬的值代入公式,可得:n1=9.91、n2=12.68;[n1] =10, [n2] =13;n=71個,s=137 132.5 m2。即長534.457 7 m,寬247.707 9 m,面積132 389.4 m2的農田范圍內,所需要布置的無線傳感器網絡節點數為71個,且71個節點所能覆蓋的最大面積約為137 132.5 m2。
根據計算結果,得出系統試驗農田以蜂窩網格方式部署的無線傳感器網絡節點分布結構如圖3所示。
在面積約為13 2389.4 m2的試驗所用農田區域中布置了71個無線傳感器節點,對農田環境信息進行監測。考慮到系統應用在農業領域,因此無線傳感器節點的部署是手動部署。在節點逐一部署時,利用移動終端的GPS功能,將每個節點的經緯度信息記錄下來,與其物理地址所對應,即可對單個節點所處的位置進行精確定位。由于節點的網絡地址與物理地址可一一對應,因此最終達到節點經緯度信息、物理地址、網絡地址三者相對應的關系,工作人員即可方便地查詢某一節點的具體信息。

圖3 系統試驗農田的傳感器節點部署
通過QT軟件實現了傳感器節點部署分析,界面如圖4所示。

圖4 傳感器節點部署分析的界面
圖4所示界面通過獲取四邊形4個頂點的經緯度,計算四邊形的長、寬及面積。最后確定所需部署的節點個數以及所覆蓋的最大面積。
4 小結
結合無線傳感器網絡與嵌入式技術,設計了嵌入式農田環境信息監測系統,選擇在江蘇省洪澤農場麥田中進行了試驗,得出節點電池電壓、RSSI值與傳輸距離之間的關系,當節點位于麥田中距離地面大約1 m高處,傳輸距離為40~60 m,節點間的RSSI值較為穩定,最終通過公式計算出監測區域的面積,確定所需部署傳感器節點的個數,得出最大覆蓋面積。試驗結果表明,節點部署分析有效合理,可適用于大范圍的農田環境。
[1] 張榮標,谷國棟,馮友兵,等.基于IEEE 802.15.4的溫室無線監控系統的通信實現 [J].農業機械學報,2008,39(8):119-122.
[2] 馮友兵,張榮標,沈敏.面向精確灌溉的無線傳感器網絡構建 [J].農業機械學報,2009,40(1):56-59.
[3] Raul M,Samuel G M,Miguel A F,et al.Wind and water flow as energy supply for small stationary data acquisition plat forms[J].Computers and Electronics in Agriculture,2008,64:120-132.
[4] Raul M,Miguel A F,Samuel G M,et al.A ZigBee multipowered wireless acquisition device for remote sensing applications in precision viticulture [J]. Computers and Electronics in Agriculture,2008,62:94-106.
[5] Kim Y Y,Evans R G,Iversen W M,et al.Instrumentation and control for wireless sensor network for automated irrigation[G]∥2006 ASABE Annual International Meeting,Portland,2006.
[6] Kim Y Y,Evans R G,Iversen W M.Remote sensing and control of an irrigation system using a distributed wireless sensor network [J]. Instrumentation and Measurement IEEE Transactions on,2008,57(7):1379-1387.
[7] 劉卉,汪懋華.基于無線傳感器網絡的農田土壤溫濕度監測系統的設計與開發 [J].吉林大學學報:工學版,2008,38(3):604-608.
[8] 蔡義華,劉剛,李莉,等.基于無線傳感器網絡的農田信息采集節點設計與試驗 [J].農業工程學報,2009,25(4):176-178.
[9] 喬曉軍,張馨,王成,等.無線傳感器網絡在農業中的應用 [J].農業工程學報,2005,21(增刊):232-234.
[10] Katsalis K,Xenakis A,Kikiras P,et al.Topology optimization in wireless sensor networks for precision agriculture applications[C]∥Sensor Technologies and Applications,Sensor Comm 2007 International Conference,Valencia,Spain,2007:526-530.
[11] 成英燕.適用于不同橢球的高斯平面坐標正反算的實用算法 [J].測繪科學,2004(8):26-27.
[12] 鄔國揚,孫獻璞.蜂窩通信 [M].西安:西安電子科技大學出版社,2002.