一種新型光電位移傳感器在Y-200圓度測量儀中的應用
2010-07-25 11:37:46李國斌李利歌
軸承 2010年7期
李國斌,李利歌
(洛陽軸研科技股份有限公司,河南 洛陽 471039)
滾動軸承是一種具有高度互換性的機械基礎件,是各種機械中傳遞運動和承受載荷的重要支承零件。隨著工業的發展,對軸承的性能、壽命和可靠性提出了更高的要求。檢測是保證軸承質量的一個重要環節。而軸承套圈與鋼球的圓度對軸承的性能影響非常大,圓度的檢測至關重要。
目前,用于解決測量小位移的方法主要有電磁法和電容法,這兩種電路的基本測量原理均是通過交流激勵信號連續對傳感器施加電流,形成與被測位移成比例的電流或電壓信號,從而測量出被測位移值。電容式傳感器由于輸出特性的非線性,寄生電容和分布電容對靈敏度和測量精度的影響,以及與傳感器聯接的電路比較復雜等,影響到其應用的可靠性,需要采取一定的補償和校正措施;電感式傳感器電源的頻率波動會導致測量誤差,電源電壓與輸出電壓還存在一定的相移,過大的正交分量會使波形失真,需通過相敏整流電路來削弱。相對電容式和電感式傳感器相對復雜的電路結構和測量誤差較大的缺點,光電傳感器根據硅光電器件光照面積的變化測量位移變化,具有結構簡單,體積小,靈敏度高,轉動慣量小,抗惡劣環境性能好等一系列特點,在軍工、汽車、輪船等工業生產各個領域得到了廣泛應用,是當前傳感器的重要發展方向之一。
在此主要設計了一種性能優良,高精度,完全無接觸的光電位移傳感器,僅從定片基板上引出電極,動片的轉動完全自由。應用高精度的儀器放大器INA122和數字轉換芯片ADS1210進行數據處理,將此傳感器應用于Y-200圓度測量儀測試鋼球的圓度,并對測量結果進行了分析。
1 光電傳感器的工作原理及其外圍電路設計
1.1 光電傳感器的基本工作原理
對于光電傳感器,不考慮邊緣光的衍射影響時,其光電流值為:
I=ηES。
式中:η為硅光電池轉換效率;E為照度;S為光照面積。
因此,只要照度或光照面積這兩個物理量直接或間接地變化,都能引起電流的變化,通過一定的測量線路將其轉化為有用的信號輸出,據此判斷物理量的變化,這就是光電傳感器的基本工作原理[1]。根據改變的物理量不同,光電傳感器可以分為2種:(1)變遮光面積式,一般用來測量微小的線位移;(2)變光通量式,常用于光強的測量,也用于測量介質濕度,密度等狀態參數。
可見,只要能轉換為機械位移變化或物質介質性質變化的物理量如壓力、速度、加速度、力、濕度、密度等,均可制成相應的光電傳感器。因此光電傳感器具有很廣的應用領域[2]。
1.2 光電位移傳感器的設計
所設計的光電位移傳感器采用變遮擋受光面積式,通過改變兩個硅光片正對受光面積來改變電流值。為了從固定的硅光片上引出導線以及保證傳感器輸出量為線性值,將傳感器設計如下:在印制板上用焊裝的方法固定好兩個硅光片,作為位移傳感器的信號接收板。其中定片的中間部分是不連通的,由硅光片a,b組成;動片為遮光擋板[3],其形狀如圖1,圖2所示。
4根導線分別從定片的印制板上引出,為了減少電磁干擾,導線需要屏蔽。將動片裝置在直線軸承上,再與定片平行放置,距離盡可能小,保持平行運動。初始位置如圖3所示。當動片移動一定位移量δ時,平行光、遮光動片和兩個硅光定片上正對部分就構成了兩個光電流I1和I2(圖4)。
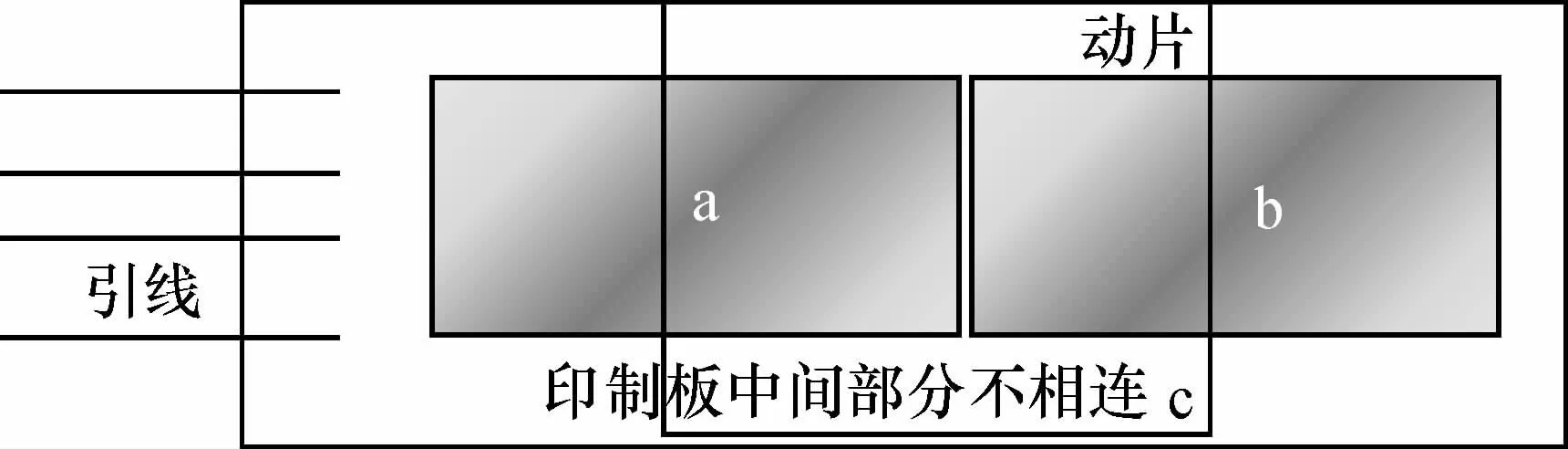
圖3 初始位置
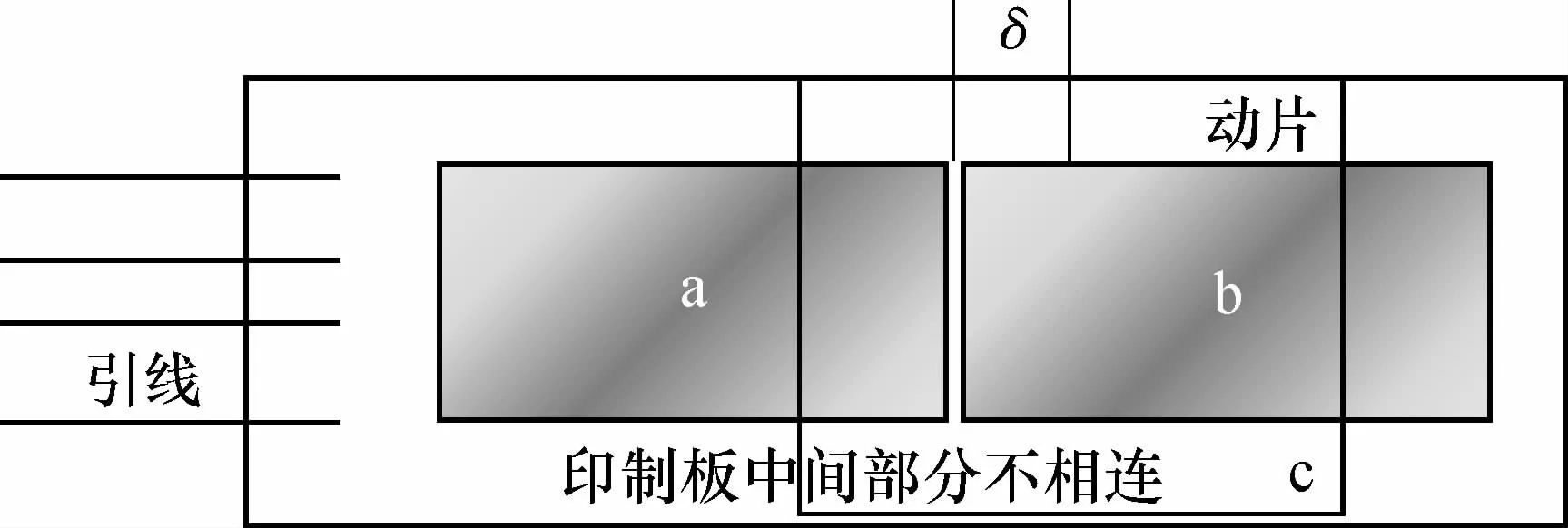
圖4 移動δ后的位置
下面對光電流進行計算:

式中:δ為傳感器動片移動的距離;h為傳感器動片寬度。
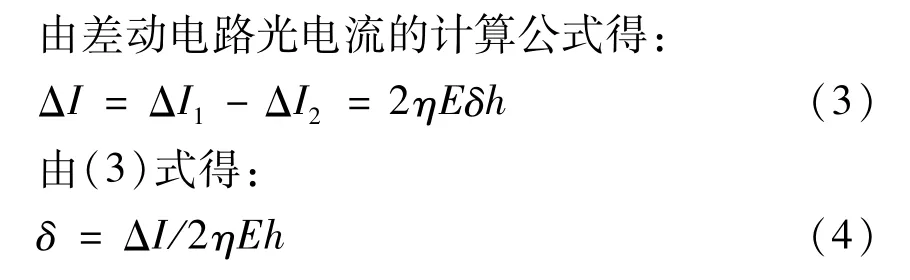
如圖4所示移動位移δ時,由(4)式可知在光照E和動靜片尺寸不變的情況下,δ∝ΔI,呈線性關系。
1.3 位移信號的采集與處理[4]
光電傳感器由于受幾何尺寸和光源的限制,光電流都很小,一般僅幾微安到幾十微安,故需選用高阻抗元件。同時由于電流值太小,使其易受外界的干擾,信號的提取比較困難。傳統的測量方法采用脈沖光源和脈沖寬度調制電路等,這些電路復雜,調試困難,穩定性能有限且設計成本很高。光電傳感器的光源采用恒定直流光源;信號采集電路采用模擬差動輸入方法提取,有效地消除衍射光對測量靈敏度和精度的影響。光電流信號電路硬件圖如圖5所示。
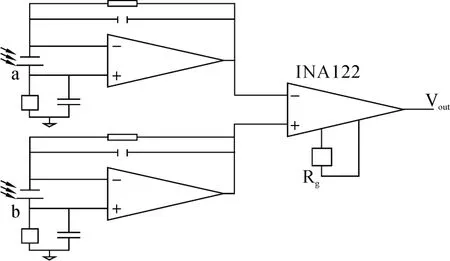
圖5 光電流信號電路硬件
1.4 電路測量精度的提高
選擇BURR-BROWN高性能A/D數字轉換器ADS1210芯片,將位移由模擬量轉換為數字量,再根據需要對數據進行處理。該器件集成度高,外圍電路簡潔,完全通過軟件控制,應用靈活,結構如圖6所示。
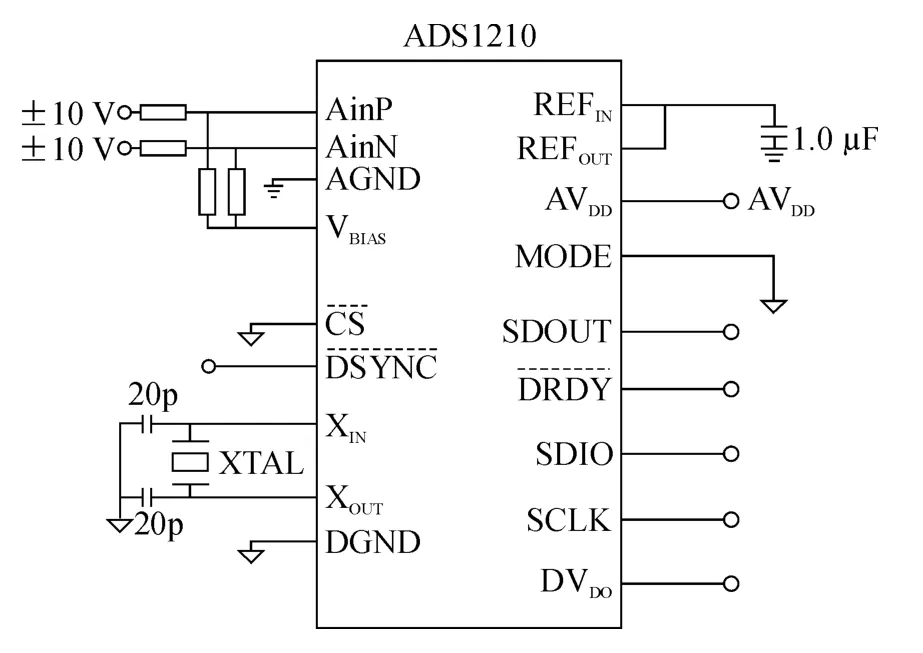
圖6 數字轉換器ADS1210芯片的結構圖
由于電源對精度影響大,為了減少其影響,電源必須穩定且噪聲小。因此,使用MAX666作+5 V電壓的穩壓芯片,利用電容的作用減少電壓波動。電路圖設計如圖7所示(圖7中Vcc是經穩壓后輸出的電壓)。ADS1210采用差分輸入,同時輸入端電壓不能大于電源電壓且不能小于零。為了能輸入雙極性信號,并加大測量范圍,提高測量精度,采用圖8所設計的電路。圖8中差分輸入的負端接芯片REF192的2.5 V輸出,保證差分基準電壓的穩定。差分輸入正端利用兩電阻調節,以滿足測量范圍的要求。圖中3.3 V電壓由REF196穩壓芯片提供。當輸入信號在-5~+5 V內變化時,可算出AINP處的電壓范圍約為1.25~3.75 V。2.5 V對應的是零點,而AINP接2.5 V就實現了對地信號的采樣轉換。
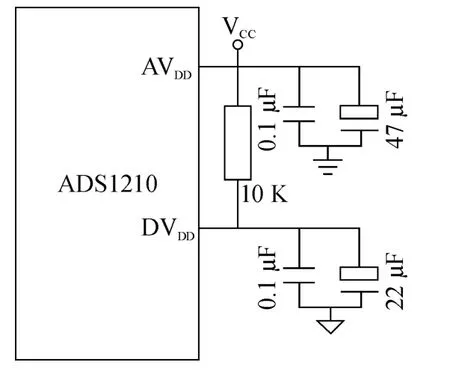
圖7 減少電壓波動圖
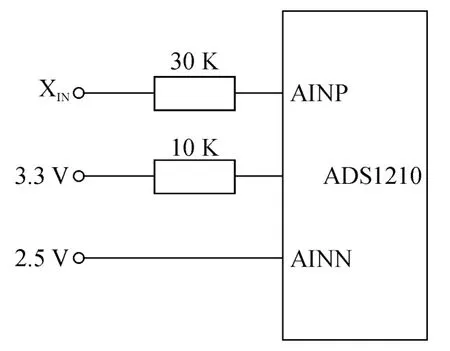
圖8 差分輸入圖
使用ADS1210校正寄存器,可通過編程對AD轉換的數據進行校正,進一步提高測量精度。通過CMR中的MD2~MD0位,選擇自校正模式。在編程時,必須嚴格遵守校正的時序。在AD轉換前失調因子寫入相應的校正寄存器,然后必須讓/DRDY保持高電平,持續一個保持周期。在這個持續時間內,ADS1210會依據失調因子自動完成校正工作。最后/DRDY變低完成此次轉換,同時ADS1210進入正常模式下工作,MD2~MD0位自動恢復為000。另外必須注意系統失調校正范圍和滿量程校正范圍受下列公式限制:

式中:Vps為滿量程電壓;︱Vos︱為失調電壓的絕對值;REFin為基準電壓;GAIN為系統放大率。
2 試驗結果與分析
由于存在加工尺寸的分散性,傳感器在正中間位置時位移值并不為0,即存在分散性的影響,在進行D/A轉換前需要調零,然后通過硬件歸一化,使在量程范圍內傳感器的輸出為0~5 V,通過ADS1210對數據的自校正位處理后,光電傳感器的位移值在-2~2 mm的范圍內,觀察到輸出由50 mV線性增大到4.95 V。在微動臺架上測量的試驗結果如圖9所示。

圖9 試驗數據
線性擬合的相關系數為0.999 38,表明傳感器輸出的線性度很高,24 bit的D/A轉換器的有效精度達到5 mV,位移可準確測量到0.1μm。
3 光電傳感器在圓度測量中的應用結果及分析
將所設計傳感器用于Y-200圓度儀,測試5級鋼球的圓度,鋼球尺寸為3.175 mm,標稱圓度值為0.13μm,圖10為電感傳感器測量結果,圖11為光電傳感器測量結果。
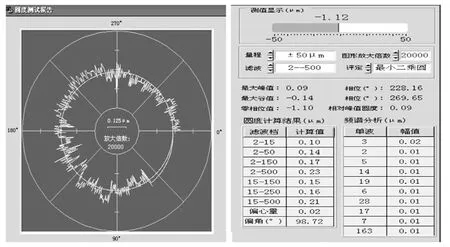
圖10 電感傳感器測量結果
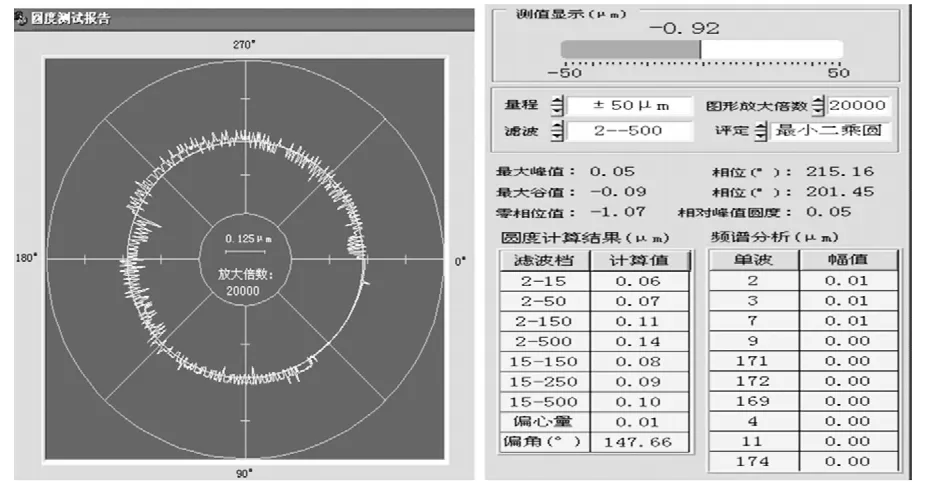
圖11 光電傳感器測量結果
從圖10和圖11可以看出在被測對象、評定方法和濾波范圍相同情況下,用電感傳感器測得的結果為0.23μm,而用光電傳感器測得的結果為0.14μm,光電傳感器測得的結果與被測鋼球的標稱值基本一致,可見采用光電傳感器的測量精度比電感傳感器的測量精度高。用安裝光電傳感器的圓度儀對此鋼球進行多次測量,幾次測量結果平均值為0.14μm,證明測量結果具有較好的重復性。利用此圓度儀測量軸承內外圈的圓度,沒有出現異常現象,說明將設計的光電傳感器用于圓度測量儀上,測量穩定可靠。
4 結束語
通過試驗可知所設計的光電傳感器的頻響、精度和線性度相當高,在-2~2 mm范圍內移動時線性輸出5 mV~4.95 V,位移可準確測量到0.1μm,傳感器的非線性可以達到0.01%~0.03%。該光電傳感器外形結構和外圍電路簡單,電引線靜止不動,對測量力完全沒有影響,延長使用壽命。將該光電傳感器應用在Y-200圓度測量儀中,縮小了電路部分的體積,實用結果表明測量精度高、穩定性好、分辯率高。如果改變該光電傳感器的形狀還可以測量角度,因此該傳感器具有很廣的應用范圍。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
