無線傳感器網(wǎng)絡中的分布式Voronoi覆蓋控制算法
2010-08-06 13:14:36徐鵬飛陳志剛鄧曉衡
通信學報 2010年8期
關(guān)鍵詞:區(qū)域
徐鵬飛,陳志剛,鄧曉衡
(1. 中南大學 信息科學與工程學院,湖南 長沙 410083;2. 湖南師范大學 數(shù)學與計算機科學學院,湖南 長沙 410081)
1 引言
傳感器網(wǎng)絡是由部署在目標區(qū)域內(nèi)的大量廉價、微型傳感器節(jié)點,通過自組織構(gòu)成一個無中心控制、無基礎設施的無線網(wǎng)絡系統(tǒng),廣泛運用于軍事、環(huán)境監(jiān)測等領(lǐng)域[1];傳感器節(jié)點通過能量有限的電池供電,節(jié)能成為傳感器網(wǎng)絡的重要研究內(nèi)容[1,2]。覆蓋控制是選擇部分節(jié)點活躍工作(即活躍節(jié)點),將其余節(jié)點(即冗余節(jié)點)轉(zhuǎn)入能耗較低的睡眠狀態(tài),是一種提高網(wǎng)絡能量效率、延長網(wǎng)絡生存時間的有效策略[2,3]。
為了保證傳感器網(wǎng)絡的感知、通信等服務質(zhì)量,活躍節(jié)點應維持網(wǎng)絡原有覆蓋范圍與連通性,綜合考慮節(jié)點能量、控制方式等因素[3]。在傳感器網(wǎng)絡覆蓋部分目標區(qū)域的假設條件下,本文提出一種維持網(wǎng)絡原有覆蓋范圍、連通性的分布式Voronoi覆蓋控制算法(DVC, distributed voronoi coverage algorithm)。仿真實驗表明,DVC活躍節(jié)點的數(shù)量與覆蓋度接近集中式算法,優(yōu)于一般的分布式算法;而活躍節(jié)點的平均能量和算法性能更加具有優(yōu)勢。
本文組織如下:第2節(jié)介紹相關(guān)研究工作;第3節(jié)定義網(wǎng)絡覆蓋模型;第4節(jié)詳細描述算法與有關(guān)結(jié)論;第5節(jié)為仿真實驗;第6節(jié)是結(jié)束語。
2 相關(guān)研究
分布式覆蓋控制包括冗余識別與冗余調(diào)度2個基本問題[4];其中冗余識別判斷節(jié)點是否為冗余節(jié)點,冗余調(diào)度確定將哪些冗余節(jié)點轉(zhuǎn)入睡眠狀態(tài)。文獻[4]使用扇區(qū)并集近似描述節(jié)點間重疊的覆蓋范圍,提出隨機時間退避的冗余調(diào)度規(guī)則。文獻[5]將節(jié)點覆蓋范圍劃分為虛擬網(wǎng)格,每個網(wǎng)格至少被一個鄰居覆蓋時為冗余節(jié)點,提出令牌驅(qū)動的冗余調(diào)度規(guī)則。文獻[6]將節(jié)點覆蓋范圍簡化為覆蓋圓盤的邊界,提出圓周覆蓋的概念。文獻[7]通過實例說明圓周覆蓋可能將節(jié)點誤識為冗余節(jié)點,提出相應規(guī)則降低誤識率,運用支配集進行冗余調(diào)度。上述文獻只能近似維持網(wǎng)絡原有覆蓋范圍,冗余識別復雜度、冗余調(diào)度收斂性與節(jié)點密度相關(guān),目標區(qū)域邊界附近的活躍節(jié)點過多。
實際上,每個節(jié)點原則上只要覆蓋目標區(qū)域內(nèi)與自己最近的點,為此國內(nèi)外學者提出使用計算幾何的Voronoi劃分研究冗余識別[8~11]。文獻[8]使用Voronoi區(qū)域的面積閾值識別冗余節(jié)點,很難有效維持網(wǎng)絡原有覆蓋范圍。文獻[9]通過重構(gòu)剔除節(jié)點后的 Voronoi劃分來識別冗余節(jié)點,計算復雜度為O(n2lgn);文獻[8]與文獻[9]通過集中方式實現(xiàn)。文獻[10]與文獻[11]基于Voronoi劃分的冗余識別規(guī)則相對比較簡單,可以使用隨機時間退避、支配集等方式進行分布式冗余調(diào)度。但是上述基于Voronoi劃分的冗余識別要求網(wǎng)絡覆蓋整個目標區(qū)域;事實上,隨機部署網(wǎng)絡覆蓋整個目標區(qū)域時將導致高冗余度[12],節(jié)點能量耗盡也可能導致網(wǎng)絡不能覆蓋整個目標區(qū)域[13]。
本文主要工作:1) 在網(wǎng)絡覆蓋部分目標區(qū)域的假設條件下,提出一種基于局部Voronoi區(qū)域的冗余識別規(guī)則,其計算復雜度與節(jié)點密度無關(guān),完善已有的Voronoi覆蓋理論;2) 提出一種能量優(yōu)先的Voronoi調(diào)度規(guī)則,通信相鄰、局部Voronoi不相鄰的節(jié)點可以同步執(zhí)行冗余識別,提高分布式調(diào)度的收斂性。3) 通過仿真實驗,分析隨機均勻部署網(wǎng)絡的覆蓋質(zhì)量以及本文算法的有效性。
3 問題描述
定義1(假設條件) 給定目標區(qū)域R2內(nèi)n(≥3)個互不重疊的傳感器節(jié)點集S。
1) 假設節(jié)點具有相同傳感半徑 Rs,節(jié)點 u∈S的覆蓋范圍是以節(jié)點u為圓心、Rs為半徑的圓盤,記為覆蓋圓Cu;當且僅當點p∈R2滿足||up||≤Rs(即p∈Cu)時,節(jié)點u覆蓋點p或點p被節(jié)點u覆蓋;其中||·||表示2個點之間的歐氏距離。
2) 如果存在點 p∈R2與任意節(jié)點 u∈S滿足||up||>Rs,則傳感器節(jié)點集S僅覆蓋部分目標區(qū)域,即部分覆蓋網(wǎng)絡;否則,傳感器節(jié)點集S可以覆蓋整個目標區(qū)域,即完全覆蓋網(wǎng)絡。在部分覆蓋網(wǎng)絡中,不能被任意節(jié)點覆蓋的點簡稱覆蓋盲點,覆蓋盲點的集合簡稱覆蓋盲區(qū)。
3) 將目標區(qū)域 R2簡化為整個平面,任意覆蓋圓在目標區(qū)域R2內(nèi),所有覆蓋圓的并集構(gòu)成網(wǎng)絡的原有覆蓋范圍C;本文研究部分覆蓋網(wǎng)絡下的覆蓋控制,這種簡化不影響問題的分析,即將目標區(qū)域R2內(nèi)除覆蓋范圍 C外的子區(qū)域作為網(wǎng)絡的覆蓋盲區(qū);若無特別說明,本文區(qū)域R2是指整個平面。
4) 假設節(jié)點具有相同通信半徑Rc,且Rc≥2Rs(注意,本文的實例分析假設Rc=2Rs。);相互位于通信半徑范圍的節(jié)點互為通信鄰居或通信相鄰。
定義 2(Voronoi劃分[14]) 給定平面 R2內(nèi) n(≥3)個互不重疊的節(jié)點集S。
1) 點p∈R2與節(jié)點集S中的節(jié)點u最近,當且僅當點 p 與任意節(jié)點 x∈S(x≠u)滿足||up||≤||px||。
2) 平面R2內(nèi)所有與節(jié)點u∈S最近點的集合構(gòu)成節(jié)點u的Voronoi區(qū)域V(R2,S,u),

3) 節(jié)點u、x∈S之間的垂直平分線記為L(u,x),以垂直平分線L(u,x)為界、包含節(jié)點u的半平面記為H(u,x);任意點p∈R2,當且僅當滿足||up||≤||px||與 u≠x時有 p∈H(u,x),則

4) 將平面R2內(nèi)每個點劃分到節(jié)點集S中最近的節(jié)點,即所有Voronoi區(qū)域的并集,構(gòu)成節(jié)點集S在平面R2內(nèi)唯一的Voronoi劃分V(R2,S)。
定義 3(Voronoi覆蓋) 對目標區(qū)域 R2內(nèi)的傳感器節(jié)點集S求解Voronoi劃分V(R2,S)。
1) 當且僅當任意點 p∈V(R2,S,u)滿足||up||≤Rs時,V(R2,S,u)或節(jié)點u滿足Voronoi覆蓋;換言之,V(R2,S,u)滿足 Voronoi覆蓋,當且僅當節(jié)點u∈S覆蓋目標區(qū)域R2內(nèi)所有與自己最近的點。
2) 當且僅當節(jié)點集S中每個節(jié)點滿足Voronoi覆蓋時,V(R2,S)滿足Voronoi覆蓋;換言之,V(R2,S)滿足Voronoi覆蓋,當且僅當目標區(qū)域R2內(nèi)任意點被節(jié)點集S中的最近節(jié)點覆蓋。
定義 4(局部 Voronoi覆蓋) 給定目標區(qū)域R2內(nèi)的傳感器節(jié)點集S與傳感半徑Rs。
1) 設節(jié)點u∈S與其2Rs范圍內(nèi)的鄰居為N(u),則V(R2,N(u),u)為節(jié)點u的局部Voronoi區(qū)域。
2) 當且僅當任意點 p∈V(R2,N(u),u)滿足||up||≤Rs(即 V(R2,N(u),u)位于覆蓋圓 Cu內(nèi))時,V(R2,N(u),u)或節(jié)點u滿足局部Voronoi覆蓋。
例如,圖 1(a)給出節(jié)點集 S={u1,…,u12}的Voronoi劃分 V(R2,S),圖 1(b)給出每個節(jié)點的局部Voronoi區(qū)域,其中實線圍成包含一個節(jié)點的凸區(qū)域即為該節(jié)點的(局部)Voronoi區(qū)域。
定義 5(Voronoi性質(zhì)[14]) 給定 Voronoi劃分V(R2,S)。
1) Voronoi區(qū)域的邊界簡稱 Voronoi邊;如果V(R2,S,u)與V(R2,S,k)存在公共的Voronoi邊,則節(jié)點u、k∈S(u≠k)共享 Voronoi邊或互為 Voronoi鄰居(即Voronoi相鄰)。
2) 節(jié)點u∈S滿足u∈V(R2,S,u)、且不在Voronoi邊上;任意節(jié)點 k∈S(u≠k)滿足 k?V(R2,S,u)。
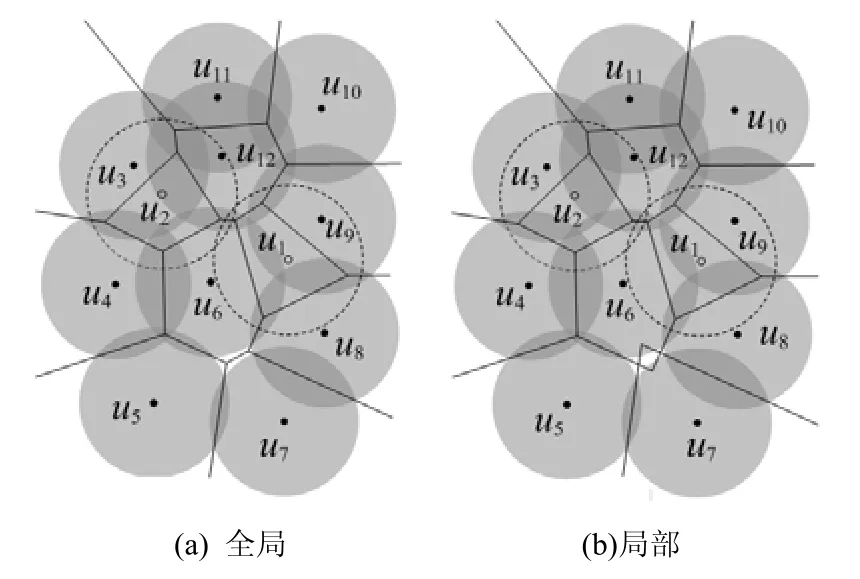
圖1 Voronoi劃分與Voronoi覆蓋
3) 如果點p∈V(R2,S,u)不在Voronoi邊上,則任意節(jié)點 k∈S(k≠u)滿足||kp||>||pu||。
4) 設節(jié)點u的所有Voronoi鄰居為Vn(R2,S,u),當且僅當 k∈Vn(R2,S,u)時有 u∈Vn(R2,S,k)。
5) 當且僅當 V(R2,S,u)∩L(u,k)≠φ,節(jié)點 u、k∈S(u≠k)共享 Voronoi邊(V(R2,S,u)∩L(u,k))。
6) Voronoi區(qū)域是由Voronoi邊圍成的凸多邊形區(qū)域,即
定義6 給定局部Voronoi區(qū)域V(R2,N(u),u)與局部Voronoi鄰居Vn(R2,N(u),u),將區(qū)域V(R2,N(u),u)內(nèi)每個點劃分到節(jié)點集 Vn(R2,N(u),u)中,最近節(jié)點后的Voronoi劃分為V(V(R2,N(u),u),Vn(R2,N(u),u))。
定義7(冗余) 當且僅當任意點p∈Cu存在節(jié)點k∈(S-u)滿足||kp||≤Rs時,節(jié)點u為冗余節(jié)點或節(jié)點u滿足冗余[9];換言之,節(jié)點u滿足冗余,當且僅當任意點p∈Cu被節(jié)點集S-u中最近的節(jié)點覆蓋。
4 部分覆蓋網(wǎng)絡下的分布式Voronoi覆蓋控制
4.1 基于局部Voronoi區(qū)域的冗余識別規(guī)則
當網(wǎng)絡覆蓋部分目標區(qū)域時,任意節(jié)點根據(jù)其2Rs范圍的鄰居求解局部Voronoi區(qū)域后,至少有一個節(jié)點不滿足局部Voronoi覆蓋[15]。
4.1.1 節(jié)點不滿足局部Voronoi覆蓋
通過分析Voronoi區(qū)域V(R2,S,u)與局部Voronoi區(qū)域V(R2,N(u),u)的關(guān)系,然后給出節(jié)點u在不滿足局部Voronoi覆蓋時的冗余識別規(guī)則。
引理 1 任意Voronoi區(qū)域V(R2,S,u)與局部Voronoi區(qū)域 V(R2,N(u),u)滿足 V(R2,S,u)?V(R2,N(u),u)[15]。
證明 依據(jù)式(2)將V(R2,S,u)改寫為

依據(jù)式(2)有 V(R2,N(u),u)=∩x∈(N(u)-u)H(u,x),將其代入式(3)后有

式(4)表明 V(R2,S,u)?V(R2,N(u),u)。證畢。
推論 1 如果 V(R2,N(u),u)不滿足局部 Voronoi覆蓋,則V(R2,S,u)不滿足Voronoi覆蓋。
證明 依據(jù)引理 1,V(R2,S,u)與 V(R2,N(u),u)滿足下列情況之一。1) V(R2,S,u)=V(R2,N(u),u):則V(R2,S,u)不滿足Voronoi覆蓋;2) V(R2,S,u)? V(R2,N(u),u):V(R2,S,u)位于區(qū)域 V(R2,N(u),u)內(nèi),V(R2,S,u)至少有一條 Voronoi邊 e與V(R2,N(u),u)的任意Voronoi邊不重疊(否則,將有 V(R2,S,u)=V(R2,N(u),u)),依據(jù)Voronoi性質(zhì) 5)設 e=V(R2,S,u)∩L(u,k),則 e≠φ;設V(R2,N(u),u)∩L(u,k)=λ,已知V(R2,S,u)?V(R2,N(u),u),則有 e?λ與λ≠φ;如果 k∈N(u),V(R2,N(u),u)依據(jù)Voronoi性質(zhì)5)將有Voronoi邊λ,這樣Voronoi邊e與V(R2,N(u),u)的Voronoi邊λ重疊,與假設“Voronoi邊e與V(R2,N(u),u)的任意Voronoi邊不重疊”矛盾,即 只 能 有 k?N(u)與||uk||>2Rs; 點 p∈e 滿 足p∈V(R2,S,u)、p∈L(u,k),垂直平分線 L(u,k)上的點 p滿足||up||≥||uk||/2>Rs,即存在點 p∈V(R2,S,u)滿足||up||>Rs,V(R2,S,u)不滿足 Voronoi覆蓋。綜合上述,當 V(R2,N(u),u)不滿足局部 Voronoi覆蓋時,必有V(R2,S,u)不滿足Voronoi覆蓋。證畢。
推論2 如果V(R2,S,u)不滿足Voronoi覆蓋,則節(jié)點u必定不滿足冗余。
證明 V(R2,S,u)不滿足 Voronoi覆蓋時,將存在點q∈V(R2,S,u)滿足q?Cu;節(jié)點u為覆蓋圓Cu的圓心,線段uq與覆蓋圓Cu的邊界交于一點p,則有||pu||=Rs(即 p∈Cu)與 p∈uq(p≠q, p≠u);依據(jù) Voronoi性質(zhì)2),節(jié)點u∈V(R2,S,u)不在Voronoi邊上,則線段uq在區(qū)域V(R2,S,u)內(nèi)、與V(R2,S,u)的任意Voronoi邊不重疊,也就是點p∈V(R2,S,u)不在Voronoi邊上;依據(jù) Voronoi性質(zhì) 3),任意節(jié)點 k∈S(k≠u)滿足||kp||>||pu||與||kp||>Rs。綜合上述,V(R2,S,u)不滿足 Voronoi覆蓋時,存在點 p∈Cu與任意節(jié)點 k∈(S-u)滿足||kp||>Rs,節(jié)點u不滿足冗余。證畢。
定理 1 如果 V(R2,N(u),u)不滿足局部 Voronoi覆蓋,則節(jié)點u必定不滿足冗余。
證明 依據(jù)推論1與推論2可知。
4.1.2 節(jié)點滿足局部Voronoi覆蓋
當V(R2,N(u),u)滿足局部Voronoi覆蓋時,區(qū)域V(R2,N(u),u)位于覆蓋圓Cu內(nèi),覆蓋圓Cu劃分為不相交的子集:V(R2,N(u),u)與Cu-V(R2,N(u),u);依據(jù)定義7,當且僅當這2個區(qū)域內(nèi)任意點都能被節(jié)點集S-u中最近的節(jié)點覆蓋時,節(jié)點u滿足冗余。
推論 3 任意點 q∈(Cu-V(R2,N(u),u))存在節(jié)點m∈S(m≠u)滿足||mq||≤Rs與 q∈V(R2,N(m),m)。
證明 已知 q?V(R2,N(u),u)與 q∈Cu,則有||uq||≤Rs與 q∈R2;若 q∈R2,依據(jù)式(1)存在節(jié)點 m∈S滿足q∈V(R2,S,m);若q?V(R2,N(u),u),依據(jù)引理1有q?V(R2,S,u),則有 m≠u;若 q∈V(R2,S,m),依據(jù)式(1)有||mq||≤||uq||,則有||mq||≤Rs;依據(jù)引理 1有 V(R2,S,m)?V(R2,N(m),m),則有 q∈V(R2,N(m),m)。證畢。
推論4 如果V(R2,N(u),u)滿足局部Voronoi覆蓋,則V(R2,S,u)=V(R2,N(u),u)、Vn(R2,S,u)=Vn(R2, N(u), u)。
證明 V(R2,N(u),u)滿足Voronoi覆蓋時,任意點 p∈V(R2,N(u),u)滿 足 ||up||≤ Rs; 任 意 節(jié) 點x∈(S-N(u))滿足 u≠x 與||ux||>2Rs,也就有||up||<||ux||/2與 p∈H(u,x),則有 p∈(∩x∈(S-N(u))H(u,x));綜合上述,有 V(R2,N(u),u)?(∩x∈(S-N(u))H(u,x)),依據(jù)式(4)有V(R2,S,u)=V(R2,N(u),u),根據(jù)Voronoi鄰居定義又有Vn(R2,S,u)=Vn(R2,N(u),u)。證畢。
引理2 如果點p∈V(R2,S,u)與節(jié)點集Vn(R2,S,u)中最近的節(jié)點為k,則點p與節(jié)點集S-u中最近的節(jié)點仍是k。
證明 詳細見文獻[11]的引理5.3證明。
推論5 當V(R2,N(u),u)滿足局部Voronoi覆蓋時,如果任意點 p∈V(R2,N(u),u)被節(jié)點集Vn(R2,N(u),u)中最近的節(jié)點覆蓋,則節(jié)點 u滿足冗余;否則,節(jié)點u不滿足冗余。
證明 依據(jù)推論3,區(qū)域(Cu-V(R2,N(u),u))內(nèi)任意點必被節(jié)點集S-u中最近的節(jié)點覆蓋,節(jié)點u是否冗余取決于,區(qū)域V(R2,N(u),u)內(nèi)任意點是否被節(jié)點集S-u中最近的節(jié)點覆蓋;設點p∈V(R2,N(u),u)與節(jié)點集 Vn(R2,N(u),u)中最近的節(jié)點為 k。已知V(R2,N(u),u)滿足 Voronoi覆蓋,依據(jù)推論 4有V(R2,S,u)=V(R2,N(u),u)與 Vn(R2,S,u)=Vn(R2,N(u),u),則點 p∈V(R2,S,u)與節(jié)點集 Vn(R2,S,u)中最近的節(jié)點為k;依據(jù)引理2,點p與節(jié)點集S-u中最近的節(jié)點為 k;換言之,任意點 p∈V(R2,N(u),u)被節(jié)點集Vn(R2,N(u),u)中最近的節(jié)點k覆蓋,點p必被節(jié)點集S-u中最近的節(jié)點k覆蓋,節(jié)點u滿足冗余;否則,存在點 p∈V(R2,N(u),u)不能被節(jié)點集 Vn(R2,N(u),u)中最近的節(jié)點k覆蓋,點p也不能被節(jié)點集S-u中最近的節(jié)點k覆蓋,節(jié)點u不滿足冗余。證畢。
定理 2(Voronoi冗余) 當 V(R2,N(u),u)滿足Voronoi覆蓋時,如果V(V(R2,N(u),u)、Vn(R2,N(u),u))滿足Voronoi覆蓋,則節(jié)點u滿足冗余,簡稱Voronoi冗余;否則,節(jié)點u不滿足冗余。
證明 如果 V(V(R2,N(u),u)、Vn(R2,N(u),u))滿足Voronoi覆蓋,則任意點 p∈V(R2,N(u),u)被節(jié)點集Vn(R2,N(u),u)中最近的節(jié)點覆蓋,依據(jù)推論5有節(jié)點u滿足冗余;否則,存在點p∈V(R2,N(u),u)不能被節(jié)點集 Vn(R2,N(u),u)中最近的節(jié)點覆蓋,依據(jù)推論 5將有節(jié)點u不滿足冗余。證畢。
定理 2與文獻[11]的區(qū)別是,任意滿足局部Voronoi覆蓋的節(jié)點可以進行Voronoi冗余識別,不管其他節(jié)點是否滿足局部 Voronoi覆蓋,即定理 2允許網(wǎng)絡覆蓋部分目標區(qū)域;文獻[11]要求網(wǎng)絡覆蓋整個目標區(qū)域,此時所有節(jié)點滿足局部 Voronoi覆蓋[15];因此,文獻[9]與文獻[11]是定理2的特例情況,定理1與定理2將進一步完善文獻[9]與文獻[11]的Voronoi覆蓋理論。
例如圖 1(b),節(jié)點 ui(i=3,…,11)不滿足局部Voronoi覆蓋,節(jié)點u1、u2滿足局部Voronoi覆蓋,依據(jù)定理2可知節(jié)點u1、u2滿足Voronoi冗余,如圖2(a)所示;從圖1可以發(fā)現(xiàn)節(jié)點u1、u2確實為冗余節(jié)點。
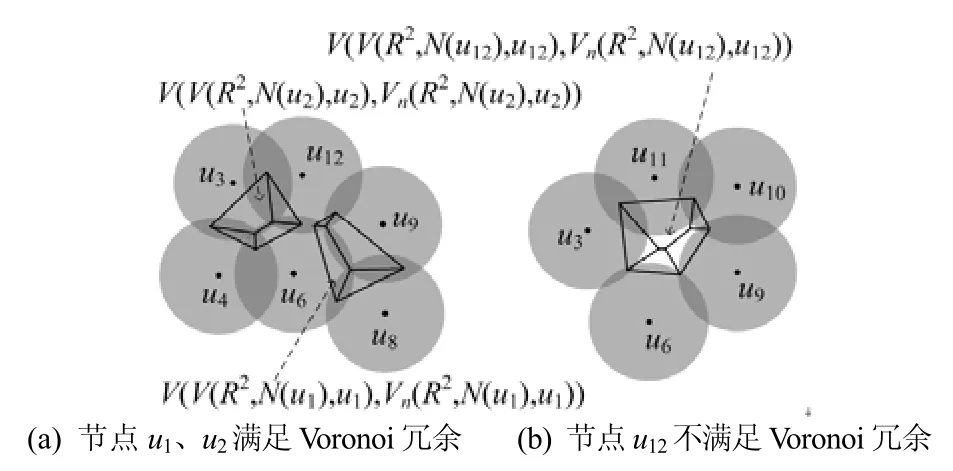
圖2 Voronoi冗余實例
4.2 能量優(yōu)先的Voronoi調(diào)度規(guī)則
任意節(jié)點根據(jù)2Rs范圍的鄰居,定理 1與定理2可以獨自確定是否冗余。為了維持網(wǎng)絡原有覆蓋范圍,不滿足冗余的節(jié)點只能為活躍(Active)狀態(tài),不能轉(zhuǎn)入睡眠(Sleep)狀態(tài)[9];一個冗余節(jié)點能否轉(zhuǎn)入 Sleep狀態(tài),應根據(jù)其他節(jié)點的狀態(tài)來確定。為此,本文提出一種能量優(yōu)先的Voronoi調(diào)度策略。
4.2.1 調(diào)度算法描述
假設節(jié)點通過消息交互維護2Rs范圍內(nèi)的鄰居位置、能量與狀態(tài)等信息。首先,將N(u)中所有節(jié)點標記為Unset狀態(tài);然后,節(jié)點u通過調(diào)度策略確定最終狀態(tài)(Active或Sleep)后,向N(u)中所有鄰居廣播最終狀態(tài)消息;最后,如果節(jié)點u為Active狀態(tài),則繼續(xù)接收鄰居的狀態(tài)消息,直到N(u)中所有鄰居確定最終狀態(tài),以維護活躍鄰居信息。
其調(diào)度策略如下:1) V(R2,N(u),u)不滿足局部Voronoi覆蓋:節(jié)點u依據(jù)定理1將不滿足冗余,設置為Active狀態(tài)。2) V(R2,N(u),u)滿足局部Voronoi覆蓋:節(jié)點u先接收N(u)中鄰居的狀態(tài)消息,標記N(u)中的Active節(jié)點、剔除N(u)中的Sleep節(jié)點;當Vn(R2,N(u),u)中包含Sleep節(jié)點時,重構(gòu)剔除Sleep節(jié)點后的V(R2,N(u),u);當Vn(R2,N(u),u)中所有能量較低(若能量相同,則節(jié)點 ID 值較小)節(jié)點確定為Active狀態(tài)后,節(jié)點u使用定理2進行冗余識別;如果節(jié)點u滿足Voronoi冗余,則為Sleep狀態(tài);否則為Active狀態(tài)。
其算法詳細步驟如圖3所示,節(jié)點的任務/狀態(tài)轉(zhuǎn)換如圖4所示(注意:為了簡化問題描述,下文假設任意2個節(jié)點的能量不同)。

圖3 DVC算法
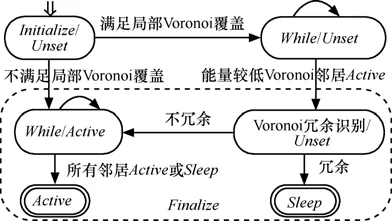
圖4 調(diào)度的任務/狀態(tài)轉(zhuǎn)換
4.2.2 調(diào)度實例分析
1) 設圖1(b)所示網(wǎng)絡的目標區(qū)域為整個平面,節(jié)點能量為其編號。初始化時,不滿足局部Voronoi覆蓋的節(jié)點ui(i=3,…,11)設置為Active狀態(tài),滿足局部Voronoi覆蓋的節(jié)點u1、u2、u12進入While/Unset循環(huán);第1輪,節(jié)點u1、u2退出While/Unset循環(huán),執(zhí)行 Voronoi冗余識別后為 Sleep狀態(tài),如圖 2(a)所示;第2輪,節(jié)點u12收到節(jié)點u1、u2的睡眠消息,重構(gòu)局部Voronoi區(qū)域、退出While/Unset循環(huán),執(zhí)行Voronoi冗余識別后為Active狀態(tài),如圖2(b)所示。每輪調(diào)度的節(jié)點狀態(tài)變化如表1所示。
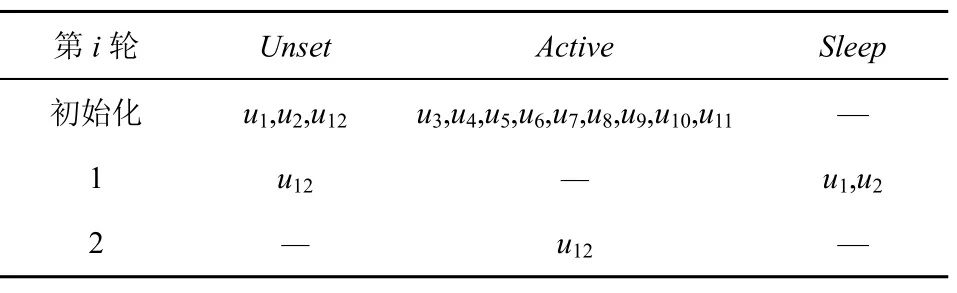
表1 DVC調(diào)度實例
2) 如果目標區(qū)域為整個平面,則不滿足局部Voronoi覆蓋的節(jié)點稱為邊界節(jié)點[15];當目標區(qū)域為有界區(qū)域時,應將有界目標區(qū)域與節(jié)點的局部Voronoi區(qū)域進行交集操作[9],這樣一些邊界節(jié)點有可能滿足局部Voronoi冗余。例如圖5 (a)所示,目標區(qū)域為整個平面時,邊界節(jié)點u1、u2、u3不是冗余節(jié)點;如果目標區(qū)域的邊界為圖5(a)的實線方框,則節(jié)點u1滿足Voronoi冗余,如圖5(b)所示。

圖5 有界目標區(qū)域調(diào)度實例
4.2.3 算法正確性分析
結(jié)論 1 通信相鄰、局部 Voronoi不相鄰的節(jié)點可以同步執(zhí)行Voronoi冗余識別。
證明 設V(R2,N(u),u)滿足局部Voronoi覆蓋,任意局部 Voronoi鄰居 k∈Vn(R2,N(u),u)滿足k∈Vn(R2,S,u)(推論 4),則有 u∈Vn(R2,S,k)(Voronoi性質(zhì)4));節(jié)點u執(zhí)行Voronoi冗余識別時,V(R2,N(k),k)有下列情況之一。
1) 不滿足局部Voronoi覆蓋:節(jié)點k在初始化時已經(jīng)設置為Active狀態(tài)。
2) 滿足局部 Voronoi覆蓋:依據(jù)推論 4有Vn(R2,N(k),k)=Vn(R2,S,k),則有 u∈Vn(R2,N(k),k);若k.E>u.E,節(jié)點k至少要收到節(jié)點u的狀態(tài)消息后執(zhí)行Voronoi冗余識別,即節(jié)點k處于While/Unset循環(huán);否則,節(jié)點 u至少要收到節(jié)點 k的狀態(tài)消息后執(zhí)行Voronoi冗余識別,即節(jié)點k為Active狀態(tài)(若為Sleep狀態(tài),則已從 N(u)剔除了節(jié)點 k,有 k?Vn(R2,N(u),u))。
綜合上述,節(jié)點u執(zhí)行Voronoi冗余識別時,其任意局部Voronoi鄰居k或處于While/Unset循環(huán)或為Active狀態(tài),不會轉(zhuǎn)入睡眠狀態(tài);換言之,局部Voronoi相鄰節(jié)點異步執(zhí)行Voronoi冗余識別,局部Voronoi鄰居為通信鄰居的子集,即通信相鄰、局部 Voronoi不相鄰的節(jié)點可以同步執(zhí)行 Voronoi冗余識別。證畢。
例如,根據(jù)圖1(b)可知節(jié)點u1、u2滿足通信相鄰、局部 Voronoi不相鄰;根據(jù)表 1,節(jié)點 u1、u2同步執(zhí)行Voronoi冗余識別后轉(zhuǎn)入睡眠狀態(tài)。
推論6 如果V(R2,N(u),u)滿足局部Voronoi覆蓋,點p∈V(R2,N(u),u)與節(jié)點集Vn(R2,N(u),u)中最近的節(jié)點為k,則有p∈V(R2,(N(k)-u),k)。
證明 依據(jù)推論5的證明,點p與節(jié)點集S-u中最近的節(jié)點仍是k,依據(jù)式(1)有p∈V(R2,(S-u),k);顯然,(N(k)-u)為(S-u)的子集,依據(jù)引理 1有V(R2,(S-u),k)?V(R2,(N(k)-u),k),則有 p∈V(R2,(N(k)-u),k)。證畢。
結(jié)論2 DVC可以維持網(wǎng)絡原有的覆蓋范圍。
證明 設V(R2,N(u),u)滿足局部Voronoi覆蓋,節(jié)點u執(zhí)行Voronoi冗余識別后轉(zhuǎn)入睡眠狀態(tài)。
1) 任意點 p∈V(R2,N(u),u):節(jié)點集 Vn(R2,N(u),u)中與點p最近的節(jié)點k可以覆蓋點p(推論5)。若節(jié)點k為活躍狀態(tài),則節(jié)點k在任何時刻都可以覆蓋點p;否則,處于While/Unset循環(huán)的節(jié)點k(結(jié)論1的證明)在收到節(jié)點u的睡眠消息后,重構(gòu)剔除節(jié)點u后的局部Voronoi區(qū)域?qū)cp(推論6);節(jié)點k在后繼調(diào)度過程中,只有其局部Voronoi鄰居覆蓋點p的情況下,才有可能轉(zhuǎn)入睡眠狀態(tài)。
2) 任意點 q∈(Cu-V(R2,N(u),u)):存在節(jié)點 m∈S(m≠u)滿足 q∈V(R2,N(m),m)與||mq||≤Rs(推論 3);若節(jié)點m為活躍狀態(tài),節(jié)點m在任何時刻都可以覆蓋點q;否則,將有V(R2,N(m),m)滿足局部Voronoi覆蓋,節(jié)點m只有在其局部Voronoi鄰居覆蓋點q∈V(R2,N(m),m)的情況下,才有可能轉(zhuǎn)入睡眠狀態(tài)。
綜上所述,Voronoi冗余節(jié)點轉(zhuǎn)入睡眠狀態(tài)后,其覆蓋圓內(nèi)任意點可以被其他節(jié)點覆蓋,不會轉(zhuǎn)變?yōu)楦采w盲點,即可以維持網(wǎng)絡原有覆蓋范圍。證畢。
推論 7 如果 Rc≥2Rs、V(R2,S)滿足 Voronoi覆蓋,則節(jié)點集S構(gòu)成連通網(wǎng)絡。
證明 V(R2,S)的直線對偶圖D(S)為連通圖,圖D(S)中任意邊關(guān)聯(lián)的節(jié)點u、k共享Voronoi邊e[14];依據(jù) Voronoi性質(zhì) 5)設 e=V(R2,S,u)∩L(u,k),點p∈e滿足 p∈V(R2,S,u)、p∈L(u,k);若 V(R2,S)滿足 Voronoi覆蓋,有 V(R2,S,u)滿足 Voronoi覆蓋,則有||up||≤Rs;垂直平分線 L(u,k)上的點 p滿足||uk||≤2||up||,則有||uk||≤Rc;因此,連通圖 D(S)的任意邊即為一條通信鏈路,節(jié)點集S構(gòu)成連通網(wǎng)絡。證畢。
推論 8 任意節(jié)點 u、k∈S(k≠u)存在節(jié)點 m∈Vn(R2, S,u) (m≠u)滿足||km||<||ku||。
證明 根據(jù) Voronoi性質(zhì) 2)有 k?V(R2,S,u);設k=p,則有p?V(R2,S,u);如果任意節(jié)點x∈Vn(R2,S,u)滿足 p∈H(u,x),根據(jù) Voronoi性質(zhì) 6)有 p∈V(R2,S,u),與“p?V(R2,S,u)”矛盾;即存在節(jié)點m∈Vn(R2,S,u)滿足m≠u與 p?H(u,m),則有||up||>||pm||,即||km||<||ku||。證畢。
結(jié)論3 如果Rc≥2Rs,則DVC可以保持網(wǎng)絡原有連通性。
證明 設V(R2,N(u),u)滿足局部Voronoi覆蓋,節(jié)點u執(zhí)行Voronoi冗余識別后轉(zhuǎn)入睡眠狀態(tài);依據(jù)定理 2有 V(V(R2,N(u),u),Vn(R2,N(u),u),u)滿足Voronoi覆蓋,不會轉(zhuǎn)入睡眠狀態(tài)的節(jié)點集Vn(R2,N(u),u)(結(jié)論1的證明)構(gòu)成連通子網(wǎng)(推論7);節(jié)點 u的任意通信鄰居 k(即||ku||≤Rc)存在節(jié)點m∈Vn(R2,S,u)滿足||km||<||ku||與||km||≤Rc(推論 8);根據(jù)推論5有Vn(R2,S,u)=Vn(R2,N(u),u);綜上所述,節(jié)點 u的任意 2個通信鄰居可以通過節(jié)點集Vn(R2,N(u),u)連通,即Voronoi冗余節(jié)點轉(zhuǎn)入睡眠狀態(tài)后不影響網(wǎng)絡原有連通性。證畢。
引理3 給定n個節(jié)點,求解任意Voronoi區(qū)域的計算復雜度為O(n)[15]。
結(jié)論 4 Voronoi冗余識別的計算復雜度為O(1),與節(jié)點密度無關(guān)。
證明 Voronoi邊的交點簡稱Voronoi頂點,節(jié)點滿足Voronoi覆蓋等價于其所有Voronoi頂點在覆蓋圓內(nèi)[9,11,15];V(R2,N(u),u)的局部Voronoi鄰居與局部Voronoi頂點的平均值為 6,與節(jié)點數(shù)量無關(guān)[14]。分別求解 V(R2,N(u),u)滿足局部 Voronoi覆蓋與V(V(R2,N(u),u),Vn(R2,N(u),u))滿足 Voronoi覆蓋的計算復雜度均為 O(1)。綜合上述,Voronoi冗余識別的計算復雜度為O(1),與節(jié)點密度無關(guān)。證畢。
結(jié)論5 DVC的計算復雜度為O(m2),其中m為2Rs范圍內(nèi)的鄰居數(shù)。
證明 根據(jù)引理3,初始化求解Vn(R2,N(u),u)、While/Unset循環(huán)重構(gòu) V(R2,N(u),u)的計算復雜度均為O(m);Vn(R2,N(u),u)中能量較低節(jié)點確定為Active狀態(tài)后退出While/Unset循環(huán),Vn(R2,N(u),u)為N(u)的子集,循環(huán)次數(shù)不會超過m,即While/Unset循環(huán)的計算復雜度為O(m2);Finalize過程中Voronoi冗余識別的計算復雜度為 O(1)。綜上所述,DVC的計算復雜度為O(m2)。
結(jié)論6 DVC的消息復雜度為O(1),整個網(wǎng)絡的消息復雜度為O(n),其中n為網(wǎng)絡節(jié)點數(shù)。
證明 每個節(jié)點初始化時通過 1個消息維護2Rs范圍內(nèi)的鄰居信息,確定最終狀態(tài)后向2Rs范圍內(nèi)的鄰居廣播1個狀態(tài)消息;即DVC的消息復雜度為O(1),整個網(wǎng)絡的消息復雜度為O(n)。證畢。
5 仿真實驗分析
本文利用 C++進行算法實現(xiàn)與仿真,與 CVT算法[9]、ECC算法[7]進行比較。實驗環(huán)境為 P4 2.4GHz CPU與512MB內(nèi)存;實驗場景如下:在目標區(qū)域1 000×1 000內(nèi)隨機均勻部署n個互不重疊的節(jié)點,分析節(jié)點數(shù)量n(即部署密度)、傳感半徑Rs(設Rc=2Rs)對活躍節(jié)點與算法性能的影響;其中每個n值隨機產(chǎn)生500個網(wǎng)絡拓撲,每個網(wǎng)絡拓撲隨機分配50個能量方案(節(jié)點能量≤10)。
5.1 隨機均勻部署網(wǎng)絡的覆蓋質(zhì)量
為了分析隨機均勻部署網(wǎng)絡的覆蓋質(zhì)量,統(tǒng)計500個網(wǎng)絡拓撲中完全覆蓋網(wǎng)絡的比率(PCC)、覆蓋目標區(qū)域的面積比率(RCT)以及網(wǎng)絡覆蓋度;當PCC、RCT小于100%時,網(wǎng)絡覆蓋部分目標區(qū)域。
1) 隨機均勻部署500~2 000個節(jié)點后:① 當Rs=50時,不能保證每個網(wǎng)絡拓撲覆蓋整個目標區(qū)域,但是網(wǎng)絡覆蓋目標區(qū)域的面積比率RCT已經(jīng)超過 97%,覆蓋盲區(qū)的面積不到 3%;特別是n<1 000時,完全覆蓋網(wǎng)絡的比率PCC接近0,如圖 6(a)所示;② 當 Rs=100時,網(wǎng)絡覆蓋目標區(qū)域的面積比率RCT已經(jīng)超過99%;直到n>1 000,完全覆蓋網(wǎng)絡的比率 PCC才收斂于 100%;如圖6(b)所示。

圖6 覆蓋質(zhì)量分析
2) 隨機均勻部署n個節(jié)點,隨著傳感半徑Rs的增大,覆蓋整個目標區(qū)域的概率增大。當n=1 000、Rs≥100時,完全覆蓋網(wǎng)絡的比率PCC收斂于 100%,如圖 6(c)所示;當 n=1 500、Rs≥80時,完全覆蓋網(wǎng)絡的比率PCC收斂于100%,如圖6(d)所示;當n≥1 000、Rs≥50時,網(wǎng)絡覆蓋目標區(qū)域的面積比率RCT已經(jīng)超過99.8%。
3) 設覆蓋點 p∈R2的節(jié)點數(shù)為 K(p),覆蓋度是衡量網(wǎng)絡能量效率、覆蓋冗余程度的一個指標[9]。隨機均勻部署網(wǎng)絡的覆蓋度,隨著節(jié)點數(shù)量n近似線性增長,隨著傳感半徑Rs近似指數(shù)增長,如圖7所示;當網(wǎng)絡覆蓋目標區(qū)域的面積比率RCT接近99.99%時,覆蓋度大約為13,如圖7的圓圈所示;當網(wǎng)絡覆蓋整個目標區(qū)域時,覆蓋度已經(jīng)達到30以上,如圖7的方框所示。
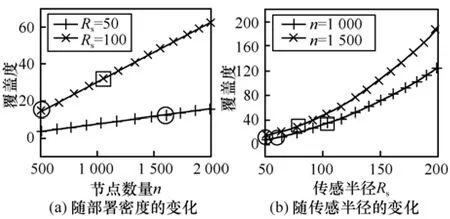
圖7 網(wǎng)絡平均覆蓋度
5.2 活躍節(jié)點的數(shù)量
當Rs=50時,DVC活躍節(jié)點將隨著節(jié)點數(shù)量n近似收斂于282,如圖8(a)所示;當Rs=100時,DVC活躍節(jié)點將隨著節(jié)點數(shù)量 n近似收斂于 75,如圖8(b)所示;隨機均勻部署 n個節(jié)點后,隨著傳感半徑Rs的增大,DVC活躍節(jié)點將逐漸減少,如Rs=200時的活躍節(jié)點大約減至 20個,如圖 8(c)、圖 8(d)所示。綜合上述實驗數(shù)據(jù)發(fā)現(xiàn),DVC活躍節(jié)點數(shù)量基本上與部署密度無關(guān),主要由傳感半徑Rs確定;總的來說,隨著節(jié)點數(shù)量n或傳感半徑Rs的增大,DVC活躍節(jié)點相對減少,冗余節(jié)點相對增多。
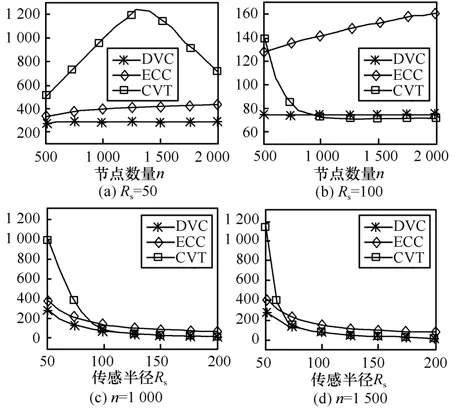
圖8 活躍節(jié)點的數(shù)量
ECC算法不考慮目標區(qū)域邊界,簡單地將所有邊界節(jié)點設置為活躍狀態(tài),使得ECC活躍節(jié)點大約維持在DVC的1.1~3.5倍;因此,合理使用目標區(qū)域的邊界可以有效地降低邊界附近的活躍節(jié)點。網(wǎng)絡覆蓋整個目標區(qū)域時,CVT活躍節(jié)點稍微優(yōu)于DVC,其差值不超過DVC活躍節(jié)點的4.5%;網(wǎng)絡覆蓋部分目標區(qū)域時,盡管存在冗余節(jié)點,但是CVT將所有節(jié)點設置為活躍狀態(tài),使得CVT活躍節(jié)點大于DVC與ECC。
5.3 睡眠節(jié)點的比率
初始網(wǎng)絡節(jié)點中睡眠節(jié)點的比率(RoS)如圖 9所示,DVC將 40%以上的節(jié)點轉(zhuǎn)入睡眠狀態(tài);當RCT收斂到99%時,DVC將60%的節(jié)點轉(zhuǎn)入睡眠狀態(tài),如圖9的方框所示;當RCT收斂到99.99%時,DVC將 80%的節(jié)點轉(zhuǎn)入到睡眠狀態(tài),如圖 9的圓圈所示。總的來說,隨機均勻部署網(wǎng)絡覆蓋部分目標區(qū)域時,在維持原有覆蓋質(zhì)量的前提下,仍存在大量的冗余節(jié)點,因此研究部分覆蓋網(wǎng)絡環(huán)境下的Voronoi覆蓋控制具有重要的意義。
5.4 活躍節(jié)點的平均覆蓋度
活躍節(jié)點的平均覆蓋度與節(jié)點數(shù)量n、傳感半徑Rs的關(guān)系如圖10所示。DVC活躍節(jié)點的平均覆蓋度大約維持在2.5,基本上與節(jié)點數(shù)量n、傳感半徑Rs無關(guān)。網(wǎng)絡覆蓋整個目標區(qū)域時,CVT活躍節(jié)點的平均覆蓋度稍微優(yōu)于 DVC,其差值小于 0.1;網(wǎng)絡覆蓋部分目標區(qū)域時,CVT活躍節(jié)點的平均覆蓋度明顯大于DVC。ECC將邊界節(jié)點設置為活躍狀態(tài),隨著節(jié)點數(shù)量n或傳感半徑Rs的增大,ECC活躍節(jié)點的平均覆蓋度呈上揚趨勢,大于DVC。
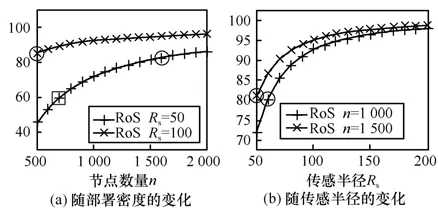
圖9 睡眠節(jié)點的比率

圖10 活躍節(jié)點的平均覆蓋度
5.5 活躍節(jié)點的平均能量
設DVC活躍節(jié)點數(shù)量為x,選擇x個能量最大節(jié)點的平均值作為活躍節(jié)點的最佳能量;圖 11給出實驗場景Rs=100與n=1 000中活躍節(jié)點的平均能量、最佳能量以及初始網(wǎng)絡的節(jié)點平均能量。
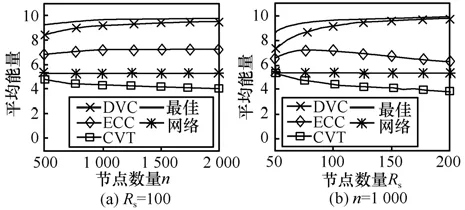
圖11 活躍節(jié)點的平均能量
隨著節(jié)點數(shù)量n或傳感半徑Rs的增大,DVC活躍節(jié)點相對減少,使得最佳能量逐漸增大;DVC將能量較低節(jié)點轉(zhuǎn)入睡眠狀態(tài),使得活躍節(jié)點的平均能量逐漸接近最佳能量,優(yōu)于ECC、CVT活躍節(jié)點的平均能量。ECC活躍節(jié)點相對減少,但是邊界節(jié)點比率相對增多,邊界節(jié)點的能量不一定最優(yōu),使得ECC活躍節(jié)點的平均能量先逐步增大、后呈下降趨勢,但優(yōu)于初始網(wǎng)絡的節(jié)點平均能量。CVT以最小活躍節(jié)點數(shù)量為目標,沒有考慮節(jié)點能量因素,CVT活躍節(jié)點的平均能量稍低于初始網(wǎng)絡的節(jié)點平均能量。
5.6 算法性能分析
5.6.1 分布式調(diào)度收斂性
通信相鄰、局部Voronoi不相鄰的節(jié)點可以同步執(zhí)行Voronoi冗余識別,通信相鄰的節(jié)點異步執(zhí)行ECC的冗余識別,使得DVC調(diào)度收斂性(即節(jié)點確定最終狀態(tài)的循環(huán)迭代次數(shù))優(yōu)于 ECC;例如,圖 12(a)、圖 12(b)給出實驗場景 Rs=100、n=1 000中DVC與ECC的循環(huán)迭代次數(shù);隨著節(jié)點數(shù)量n或傳感半徑Rs的增加,通信鄰居數(shù)量將顯著增加,DVC與ECC的迭代次數(shù)分別增多;其中,DVC的最大、平均迭代次數(shù)分別不超過42、9,而ECC的最大、平均迭代次數(shù)分別大于、接近通信鄰居數(shù)量。
5.6.2 時間性能
假設不考慮消息交互、等待時間,使用所有節(jié)點的計算時間總和分析算法時間性能;隨著節(jié)點數(shù)量n或傳感半徑Rs的增大,通信鄰居數(shù)量顯著增加,延長了DVC、ECC的計算時間;但是Voronoi冗余識別與節(jié)點密度無關(guān),使得DVC計算時間略優(yōu)于ECC,如圖12(c)、圖12(d)所示。CVT基于Voronoi劃分的冗余識別時間與節(jié)點數(shù)量相關(guān)、與傳感半徑Rs無關(guān),CVT計算時間隨著節(jié)點數(shù)量n近似指數(shù)增長,如圖12 (c)所示;網(wǎng)絡覆蓋整個目標區(qū)域后,傳感半徑Rs基本上不影響CVT計算時間,如圖12 (d)所示;總的來說,CVT計算時間要大于DVC與ECC。

圖12 算法性能分析
6 結(jié)束語
在傳感器網(wǎng)絡覆蓋部分目標區(qū)域的假設條件下,提出一種基于局部Voronoi區(qū)域的冗余識別規(guī)則,其計算時間復雜度與節(jié)點密度無關(guān);在維持網(wǎng)絡原有覆蓋質(zhì)量的情況下,提出一種能量優(yōu)先的Voronoi調(diào)度規(guī)則,對算法正確性進行了理論分析。仿真實驗表明,本文算法求解活躍節(jié)點的數(shù)量、平均覆蓋度,接近集中式CVT算法、優(yōu)于分布式ECC算法;而活躍節(jié)點的平均能量、調(diào)度收斂性以及算法時間性能優(yōu)于CVT算法與ECC算法。下一步將重點考慮Rc<2Rs、k度覆蓋(k≥2)以及三維環(huán)境下的Voronoi覆蓋控制問題。
[1] 孫利民, 李建中, 陳渝. 無線傳感器網(wǎng)絡[M]. 北京∶ 清華大學出版社,2005.SUN L M, LI J Z, CHEN Y. Wireless Sensor Networks[M]. Beijing∶Tsinghua University Press, 2005.
[2] YICK J, MUKHERJEE B. Wireless sensor network survey[J]. Computer Networks, 2008, 52∶2292-2330.
[3] 任彥, 張思東. 無線傳感器網(wǎng)絡中覆蓋控制理論與算法[J].軟件學報, 2006,17(3)∶422-433.REN Y, ZHANG S D. Theories and algorithms of coverage control for wireless sensor networks[J]. Journal of Software, 2006, 17(3)∶422-433.
[4] TIAN D, GEORGANAS N D. A coverage-preserved node scheduling scheme for large wireless sensor networks[A]. Proc of First International Workshop on Wireless Sensor Networks and Applications[C].2002. 32-41.
[5] YI Z, KRISHNENDU C. A distributed coverage and connectivity-centric technique for selecting active nodes in wireless sensor networks[J]. IEEE Transactions on Computer, 2005, 54(8)∶978-991.
[6] HUANG C F, TSENG Y C. The coverage problem in a wireless sensor networks[A]. Proc of the ACM Int'1 Workshop on Wireless Sensor Networks and Applications[C]. 2003.115-121.
[7] NURCAN T, WANG W Y. Effective coverage and connectivity preserving in wireless sensor networks[A]. Proc of IEEE Conf on Communication and Networks[C]. 2007. 3388-3393.
[8] VIERA M A M, VIERA L F M. Scheduling nodes in wireless sensor networks∶ a voronoi approach[A]. Proc of 28th Annual IEEE International Conf on Local Computer Networks[C]. 2003.423-429.
[9] 蔣杰,方力.無線傳感器網(wǎng)絡最小連通覆蓋問題求解算法[J]. 軟件學報, 2006,17(2)∶175-184.JIANG J, FANG L. An algorithm for minimal connected cover set problem in wireless sensor networks[J]. Journal of Software, 2006,17(2)∶175-184.
[10] CARBUNAR B, GRAMA A. Coverage preserving redundancy elimination in sensor networks[A]. Proc of First Annual IEEE Communications Society Conf on Sensor and Ad Hoc Communications and Networks[C]. 2004.377-386.
[11] 陸克中. 無線傳感器網(wǎng)絡中的數(shù)據(jù)收集問題研究[D]. 中國科學技術(shù)大學, 2007.70-76.LU K Z. Research on Data Collection in Wireless Sensor Networks[D].University of Science and Technology of China, 2007.70-76.
[12] BALISTER P, ZHENG Z. Allowing coverage holes of bounded diameter in wireless sensor networks[A]. Proc of IEEE INFOCOM[C].2009.136-144.
[13] 蘇瀚, 汪蕓. 傳感器網(wǎng)絡中無需地理信息的空洞填補算法[J].計算機學報, 2009, 32(10)∶1957-1970.SU H, WANG Y. A self-healing algorithm without location information in sensor networks[J]. Chinese Journal of Computer, 2009,32(10)∶1957-1970.
[14] OKABE A, BOOTS B. Spatial Tessellations∶ Concepts and Applications of Voronoi Diagram[M]. New York∶ John Wiley & Sons, 1999.
[15] ZHANG C, ZHANG Y C. Localized algorithms for coverage boundary detection in wireless sensor networks[J]. Wireless Networks, 2009,15(1)∶3-20.
猜你喜歡
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學學報(2015年3期)2015-12-10 03:49:15