電力推進船舶負載管理技術研究
2010-08-10 02:56:18武沁夏立王黎明
船電技術 2010年10期
武沁 夏立 王黎明
(海軍工程大學電氣與信息工程學院,武漢 430033)
1 引言
全電力推進是將推進用電和其他負載用電集中生產統一分配的新興技術,它能產生幾十甚至上百兆瓦級容量的電能,在滿足推進用電的同時,也為其他大功率負載的使用奠定了基礎。與陸地電網不同,船舶電力系統容量有限,眾多大功率負載的使用可能導致系統過載崩潰,為了防止出現此類問題,并在負載之間靈活調度電能,需要在系統的層面上統一管理負載。
2 負載管理的必要性
傳統的船舶電力系統不包括推進電機,單個負載的額定功率都在5到500 kW之間,該工況下所有有可能使用到的負載的額定功率總和一般不超過電站總在線功率的80%,所以傳統船舶幾乎不需要集中式的負載管理。
全電力推進系統由發電、配電、變電和推進等模塊組成,能量管理模塊對整個系統進行統籌控制[1]。與傳統船舶不同,除了一般的日常負載外,電力推進船舶還包括電力推進等大功率負載,下面對這些負載的能量需求作簡要的分析。
推進電機是電力推進系統最重要的負載,船舶全速前進時推進負載所用功率約占全部用電負荷的70%~80%。美國DD(X)全電力驅逐艦預計總裝機功率110 MW,推進總功率73 MW,占總裝機功率的66.4%[2]。英國的CVF全電力推進航母預計總裝機功率110 MW,推進總功率86 MW,占總裝機功率的78.2%[3]。
近些年來,船舶上的各種裝備逐漸從液壓、氣動和機械形式過渡到電磁和全電控制形式[4]。在海上鉆進平臺或需要動態定位的船舶中,除了主要的推進系統外,還需要用來動態定位的側推系統,側推功率約為主推的45%左右。此外近年來出現的新型雷達等探測設備運行功率也都在兆瓦以上[5]。
電力推進系統的發電機組容量大,燃氣輪機單機組容量一般都有20到50 MW,在很多工況下運行一組發電機組就能滿足需求[6]。單機組運行帶來的問題就是突然有大功率負載需啟動時,系統可能沒有足夠的剩余在線功率,重新啟動發電機組需要一定的時延,這將影響船舶的性能。
文獻[7]對大功率負載直接啟動造成系統過載進行了仿真研究。當負載忽然從1.3 MW跳變到23 MW時,導致兩發電機組失去同步,系統崩潰。儲能模塊若在此時向電網注入30 MW的功率,能有效抑制這一沖擊。
由上述可知,由于電力推進系統某些負載的運行功率大,與發電機組的容量具有可比性,如果不對它們進行合理的管理,就可能引起系統性能下降甚至過載崩潰,單機組運行問題也增加了過載的可能性,由此就出現了負載管理的問題。
3 負載管理的基本功能
能量管理模塊對電力系統進行統一控制,負載管理是其重要功能之一。它是將電能看作一種資源,通過合理控制負載對這種資源的消費行為,保證總負荷功率在任何時候都不超過系統的設定值,即保證負載對電能的消費任何時刻都不超過一定的設定值,從而提高電力推進系統的失電保護能力和能量調度的靈活性,最終保證為負載提供可靠而充分的電能。其基本功能有以下幾個方面:
1)動態優先級設定:各負載在不同工況下的重要性不同,對系統性能的影響大小也不同,所以負載的優先級隨船舶的運行工況而變化,為了給負載管理提供決策依據,應該動態的設定負載的優先級。
2)重載起動詢問:大功率負載若直接啟動,可能造成系統過載,所以應該進行阻攔詢問,當功率條件滿足時,負載起動;若功率條件不滿足,則需啟動發電機組或卸載若干負載,從而完成負載的啟動和能量的調度。
3)功率限制:在運行過程中,推進負載的功率變化很大,如在船舶全速前進時的功率就比以經濟航速航行時要大的多,為了防止推進負載功率過高導致過載,功率限制功能將考慮系統的可用功率,通過控制推進變頻器來限制推進功率超過設定值,直到有更多的功率余量提供為止。
4)快速卸載:當發生發電機脫扣或停機等嚴重故障時,系統輸出功率將急劇減少,限制推進電機功率或啟動發電機組都不能及時阻止系統過載,這時快速卸載功能將綜合考慮負載的優先級和卸載的難易程度,快速卸掉一部分負載。
4 負載管理的控制結構
負載管理是對各個負載進行系統級的統籌控制,只發調度指令,不涉及對電氣設備的具體控制,設計其控制結構時,需要充分分析負載管理功能與能量管理系統的其它功能以及電力系統各區域級和設備級控制功能的區別和聯系,合理設計各個控制功能之間的接口,從而構建一個完整的電力推進船舶控制系統,負載管理的控制結構圖如圖1所示。
圖1從信息交互的角度表示了負載管理的控制結構。底層的檢測系統由多個同步相量測量裝置構成,測量電力系統的實時數據,并通過現場總線和以太網絡將數據傳送給上位機中的歷史數據庫和實時數據庫;系統分析功能根據實時數據分析計算,得出電力系統的實時狀態、實時潮流和實時拓撲;系統分析功能還將實時數據庫中的負載狀況與歷史數據對比,若有新的負載管理需求則將相關信息通知負載管理模塊;負載管理模塊根據得到的信息,結合目標和約束條件,根據算法計算出調度步驟,然后向能量管理系統的其它模塊或電力系統區域級和設備級的控制功能輸出調度命令,同時顯示需操作的設備清單和步驟清單。
5 負載管理的算法
負載管理模塊是由一系列的目標和算法構成的,要實現負載管理的功能,除了需要總體的負載管理目標和算法外,每一個子功能如動態優先級設定、功率限制和快速卸載等,也都需要不同的算法來實現。下面提出一種基于規則的負載管理算法,其關鍵步驟如下:
1)初始化:船舶可能在各種工況下運行,其能量需求是不相同的。當啟動系統時,先選擇要運行的工況,此工況下可能用到的負載的額定功率總和即本工況的功率分配線隨之確定。若不選擇則按默認的工況啟動。工況確定后,根據本工況內各個負載的重要性,分工況設定負載的優先級。這些設定數值存儲在數據庫中,有權限的操作員可以對其進行修改。
2)啟動發電機組:初始化后,負載管理模塊向供電管理模塊發出能量請求,后者啟動合適數量的發電機組。啟動運行的發電機組的額定功率總和應該比本工況可能用到的負載的額定功率總和多出一定的余量,防止有本工況之外的負載忽然連接到電網。
負載管理算法的流程見圖2。
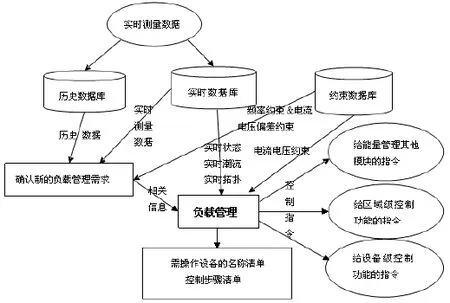
圖1 負載管理的控制結構
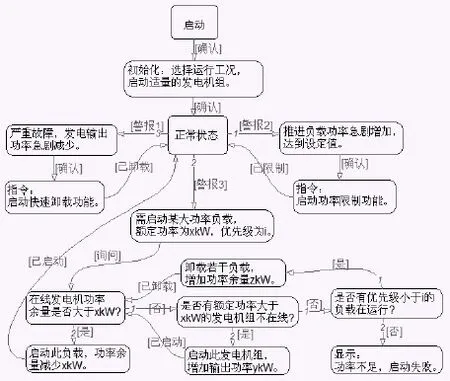
圖2 負載管理算法的流程
3)警報操作:當推進電機的功率達到設定的閥值時,自動啟動功率限制功能;當系統發生嚴重故障輸出功率急劇減少時,自動啟動快速卸載功能。
4)重載啟動:當有額定功率大于設定值的負載需要啟動時,對其進行詢問。在線發電機組如果有足夠的功率余量,直接起動;若余量不足,詢問系統內是否有不在線的發電機組,有則啟動,沒有則卸載一部分優先級最低的負載;若需啟動的負載優先級最低,則提示功率不足,啟動失敗。
6 負載管理的實現
為了驗證上述控制體系結構和算法的可行性,搭建了負載管理實驗平臺,平臺由一個小型電力系統和負載管理系統組成。電力系統的總功率為30 kW,發電機組由6組額定功率為5 kW的隔離變壓器代替,負載有6臺額定功率為3 kW的電動機、兩組功率為10 kW的電阻負載等。負載管理系統的硬件結構與上述控制結構相同。負載管理系統的軟件采用羅克韋爾公司的ControlLogix軟件系統,包括集成軟件開發平臺RSLogix5000,其主要功能是提供一個可以把程序概念轉變成一系列程序圖和定義用于快速創建可執行程序的開發平臺;通訊服務軟件包RSLinx,它支持和許多不同網絡上的多種設備同時進行通訊;人機界面軟件 RSView32,這是一種易用的、可集成的、基于組件的 MMI系統,能有效地監視并控制機器和過程。負載管理模塊主要用 RSView32軟件的“邏輯與控制”功能和自帶的VB程序編輯器來構建,部分需要快速計算的步驟由RSLogix5000來實現。
系統實時監測系統的可用功率和總負荷,當總負荷達到或超過總在線功率的85%時,系統將自動報警并執行相關動作。當有額定功率超過 3 kW 的負載需要啟動時,對其進行詢問,查看是否滿足啟動條件后執行相關動作。
圖3是負載管理初始化界面,有操作權限的操作員可以在這個界面設定修改工況的功率分配線和負載優先級,選擇并運行某一工況。
圖4是報警匯總界面,當監視的某一參數超過設定值時,系統會報警,并在一定時間后自動執行預先設定的動作,如啟動發電機組,快速卸載等,警報解除后,系統作出相應提示。

圖3 負載管理初始化界面
7 結束語
電力推進船舶的負載管理是一個全新的問題,隨著許多船舶設備向電氣化過渡,負載管理問題會變得越來越重要。本文對該問題做了初步的探討,設計了負載的控制結構,提出了基于規則的負載管理算法,并用實驗證明了其有效性。下一步的工作應充分考慮電力推進船舶的運行特點,開發更加靈活高效的負載管理策略和算法。
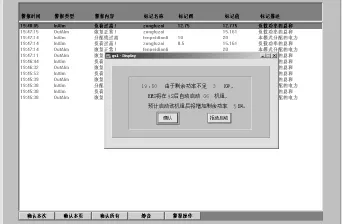
圖4 負載管理警報匯總界面
:
[1]Aibert J. Tucker. Opportunities & Challenges in Ship Systems & Control at ONR[C].40thIEEE Conference on Decision & Control,December2001,http://www.usna.edu/EPNES/Challenge_Problem.htm
[2]Wu Wei, Wang Daifeng, Ari Arapotathis. Optimal Power Generation Scheduling of a Shipboard Power System[C]. IEEE, Electric Ship Technologies Symposium,2007:519-523.
[3]石艷,徐惠明編譯. 21世紀綜合全電力推進的航母[J].船電技術, 2005(2):04-05.
[4]Matthew C. Erickson, Trey D. Oats. The Impact on New Technologies on Shipboard Command and Control[D]. Monterey, California: Naval Postgraduate School,2003.
[5]J.J.A.Van Der Burgt, P.Van Gelder, E.Van Dijk.Pulsed Power Requirements for Future Naval Ships[J].IEEE,1999:1357-1360.
[6]王慶紅.艦船綜合電力系統總體概念研究的思考[J].中國船舶研究,2006,1(3):26-27.
[7]Monti, S.D'ARCO, L.Gao. Energy Storage Management as Key Issue in Control of Power Systems in Future All Electric Ships[C].IEEE,International Symposium on Power Electronics,Electrical Drives, Automation and Motion,2008:580-585.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(2022年15期)2022-09-20 06:56:20
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
雜文月刊(2016年1期)2016-02-11 10:35:51
現代企業(2015年8期)2015-02-28 18:54:47