機動目標跟蹤系統仿真軟件設計與實現
2010-08-10 02:56:14胡炎林哲鋒張丕旭
船電技術 2010年9期
關鍵詞:系統
胡炎 林哲鋒 張丕旭
(1. 海軍駐西安艦炮軍事代表室,西安 710043;2. 海軍駐溫州地區軍事代表室,溫州 316000;3. 海軍工程大學電子工程學院,武漢 430033)
1 引言
機動目標跟蹤的基本概念在五十年代己經形成,但直到70年代卡爾曼濾波理論成功地在機動目標跟蹤中應用以來,機動目標跟蹤技術才真正引起人們的普遍關注和極大興趣。機動目標跟蹤理論需要綜合運用隨機統計決策、估值理論、最優化算法等現代信息處理技術跟蹤目標運動軌跡。所涉及的問題是控制、指揮、通訊和情報學科發展的前沿問題,是當今國際上研究的熱門方向[1,2]。
本文采用 C/S(Client/Serve,客戶機/服務器)體系結構和面向對象的模塊化設計思想,設計了機動目標跟蹤系統仿真軟件,利用劇情生成模塊模擬雷達探測到的目標運動數據,通過跟蹤算法對目標實施跟蹤處理,估計目標運動狀態,實時地在演示界面上顯示目標運動信息和跟蹤性能評估結果,建立了一個具有較高可信度的、直觀的仿真系統,為機動目標跟蹤算法研究提供一個測試、集成、檢驗和驗證的綜合一體化仿真環境。
2 軟件結構設計
C/S結構,即大家熟知的客戶機和服務器結構,是基于資源不對等性,為實現共享而發展起來的,其發展成熟于上世紀八九十年代。從開發角度看,C/S模型具有強大的數據操作和事務處理能力,且開發模型簡單,易于人們理解和接受。系統的客戶應用程序和服務器構件充分隔離,易于擴充和壓縮,且分工具體,客戶應用程序的開發集中于數據的查詢瀏覽,而數據庫服務器的開發則集中于數據的管理。由于客戶端與服務器的直接相連,因此實時性較好。另外,客戶操作界面設計有針對性,可滿足客戶個性化的業務要求。C/S結構的這些技術特點完全滿足本設計的基本要求。
2.1 系統拓撲結構
系統整體是一種C/S體系結構,但是其中各個主模塊有自己特定的內部結構,具體拓撲結構如圖1所示。
2.2 系統結構組成
本軟件系統結構設計主要由劇情生成模塊(包括劇情生成器、雷達模擬器等)、跟蹤算法實現模塊和測試評估模塊(包括數據庫、測試評估軟件等)組成,如圖2所示。
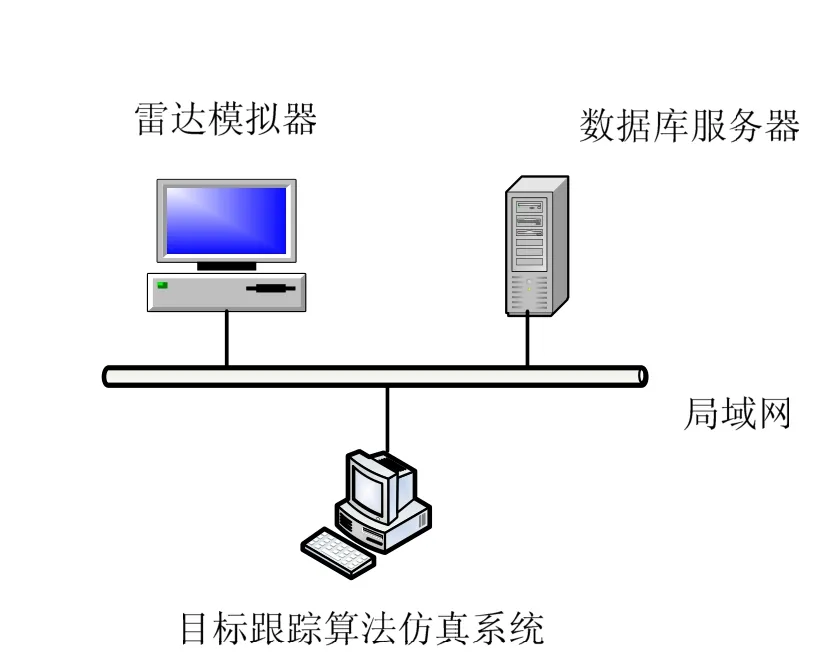
圖1 系統拓撲結構簡圖
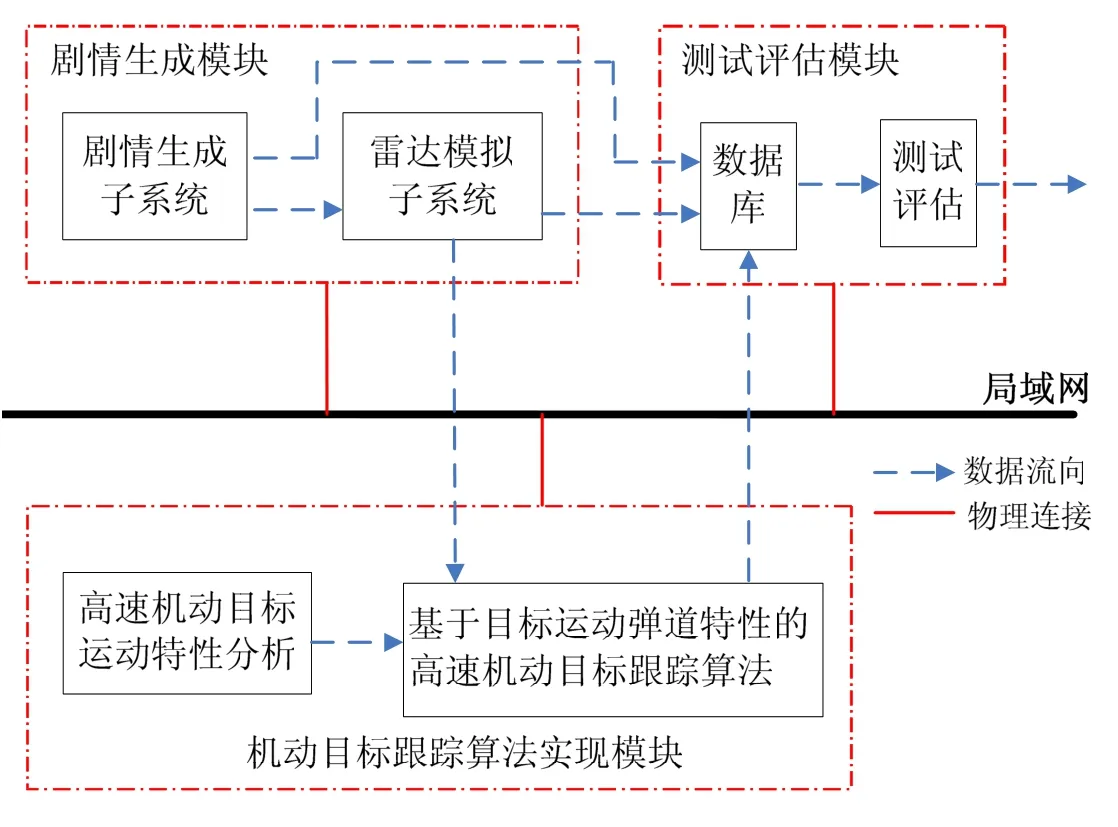
圖2 系統結構組成圖
(1)劇情生成模塊:根據劇情想定的真值數據,由雷達模擬器生成目標觀測數據。
(2)機動目標跟蹤算法實現模塊:接收模擬產生的目標觀測數據,對目標實施跟蹤處理,估計目標運動狀態。
(3)測試評估模塊:由目標真值數據、觀測數據和濾波數據評估機動目標跟蹤算法的性能。
2.3 軟件流程時序關系
劇情生成器首先根據劇情想定文件的配置要求,對雷達模擬器的仿真參數和艦艇導航信息進行配置,當配置完畢后,系統需要向劇情生成器發送反饋報文,報告傳感器啟動完畢。
劇情生成器接收到反饋報文后,向雷達模擬器和測試評估模塊發送目標運動的真值信息。雷達模擬器接收到目標的真值數據后,按照傳感器設計給定的仿真算法計算出模擬觀測數據,并向網絡發送,包括二次航跡數據、一次點跡數據和初步的目標識別結果。測試評估模塊接收到目標的真值數據和雷達模擬器輸出的模擬數據后,錄入到數據庫中,以便評估跟蹤算法的性能。
跟蹤算法實現模塊從網絡上接收到雷達模擬數據后,由數據預處理算法和跟蹤算法得出目標運動數據的濾波值,再發送到測試評估模塊。測試評估模塊獲得目標的真值數據、模擬數據和濾波數據后,就可以根據相應的性能指標評估跟蹤算法的性能。同時,演示界面可實時顯示目標運動信息和評估指標等,可直觀的評判跟蹤算法的性能。
系統流程的時序關系如圖3所示。
3 軟件主要模塊設計
3.1 劇情生成模塊
劇情生成模塊的基本功能分兩部分:產生目標真值信息和模擬雷達觀測目標數據,模擬的目標觀測數據實時地發送到跟蹤算法實現模塊和測試評估系統。
(1)產生目標真值信息
利用彈道建模技術,可設置戰場態勢,仿真獲得高速機動反艦導彈的幾種典型運動彈道數據;
(2)模擬雷達觀測目標數據
雷達模擬器的功能主要包括模擬雷達終端顯示和產生目標觀測數據,數據處理流程如圖4所示。
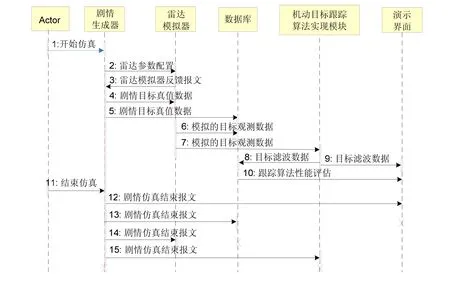
圖3 系統流程的時序關系圖
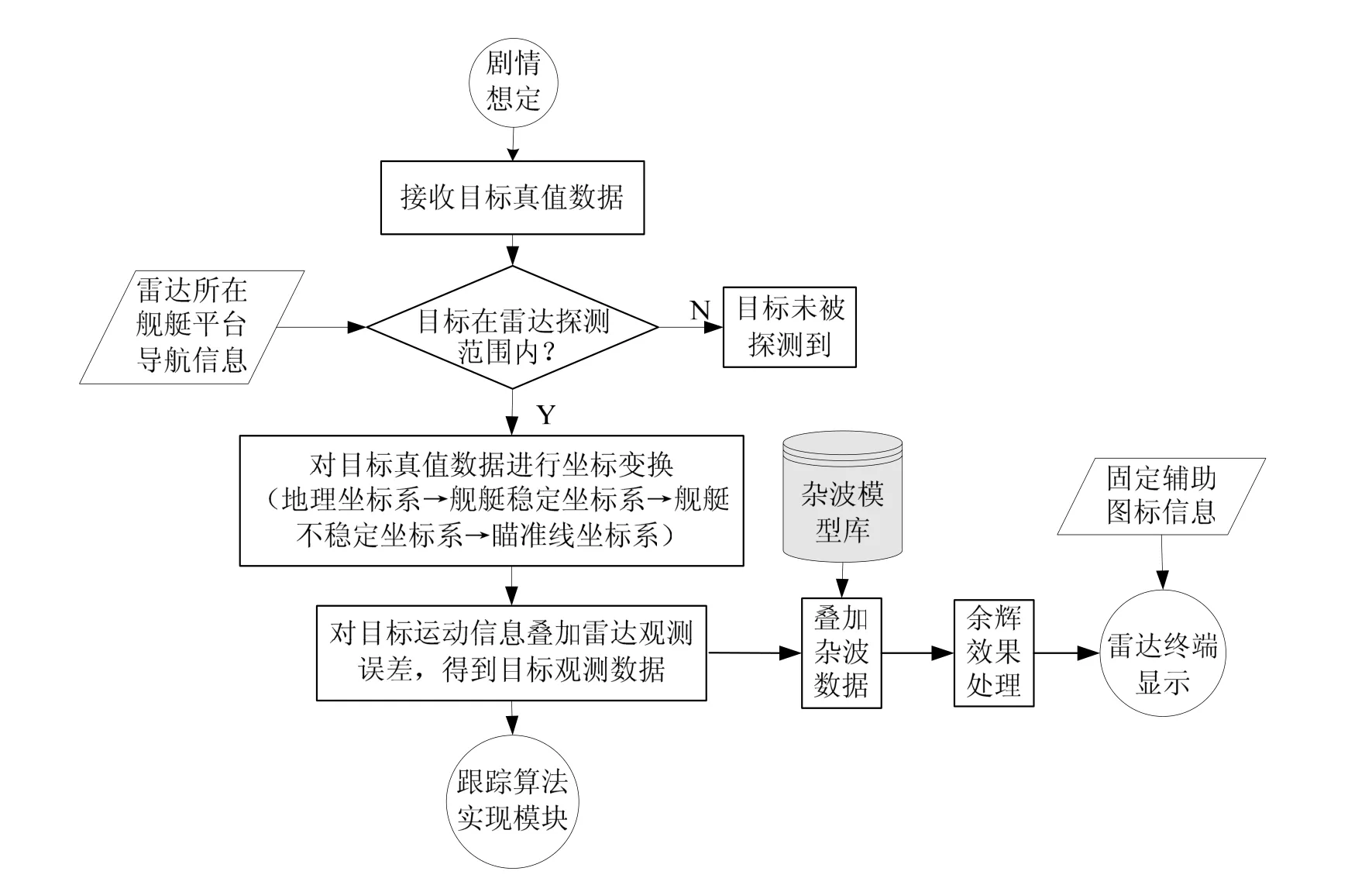
圖4 雷達模擬器數據處理流程圖
雷達終端顯示的圖像中,存在的信息不僅包括雜波和目標回波信息,還包括固定輔助圖標信息,前者的圖像信息在模擬中存在余輝效果處理的問題,而后者的信息是不需要進行余輝效果處理的。為了更好地解決上述兩者間存在的矛盾,在設計中采用兩塊圖像內存區分別存儲,定義為內存A和內存B,內存區A用于存儲目標和地物回波的圖像信息,內存區B用于存儲輔助圖標信息。對內存區A的數據進行余輝衰減控制后再與內存區B的數據進行疊加實現對圖像的顯示。同時,為了更逼真地體現終端顯控臺生成的雜波圖像,將雷達的實測數據以一定的數據格式(如二進制)存儲到雜波模型庫,仿真過程中,利用數據回放的方式實現雜波圖像。
目標觀測數據的產生應注意兩個問題:第一,雷達有一定的探測范圍,主要是受地球曲率、大氣折射效應等因素影響,在劇情想定配置雷達參數時設置,所以要先判斷目標是否在雷達探測范圍內;第二,目標真值數據是相對于地理坐標系的,運用坐標變換的方法,將目標信息轉換到雷達觀測所處的坐標系,即瞄準線坐標系,再根據劇情想定中設置的雷達參數,對真值數據疊加誤差,并模擬雷達觀測目標的過程。
3.2 高速機動目標跟蹤算法實現模塊
該模塊可針對特定的跟蹤算法設計,跟蹤算法實現流程如圖5所示。從程序設計的角度來看,跟蹤算法的實現主要在濾波與預測算法的實現上有所差異,而模型所對應的狀態轉移矩陣在實現上是一致的[3,4]。例如,傳統的基于CV和CA模型的目標跟蹤算法中是標準 Kalman濾波,近幾年研究較多的基于參數辨識模型和彈道規律的機動目標跟蹤算法中是在線辨識和 Kalman濾波,而多模型算法中存在模型之間的轉換,這些區別都體現在算法的程序實現中。
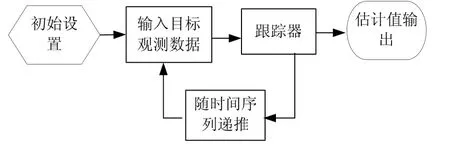
圖5 跟蹤算法實現流程圖
3.3 數據庫
數據庫在仿真系統運行過程中提供實時的數據存儲、查詢、統計和備份功能,以動態表和靜態表的形式存儲數據,例如,劇情控制信息、目標運動信息、平臺導航信息等以動態表形式存儲便于實時更新,而雷達參數信息、雷達雜波模型庫數據等則以靜態表的形式提前存儲在數據庫,只能查詢不能更改[5]。
3.4 測試評估系統
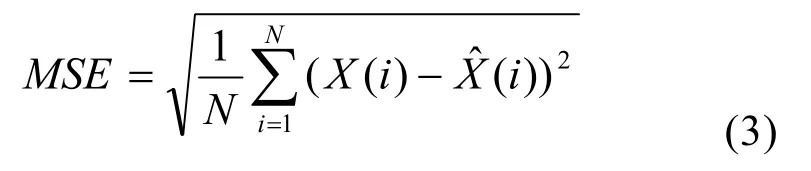
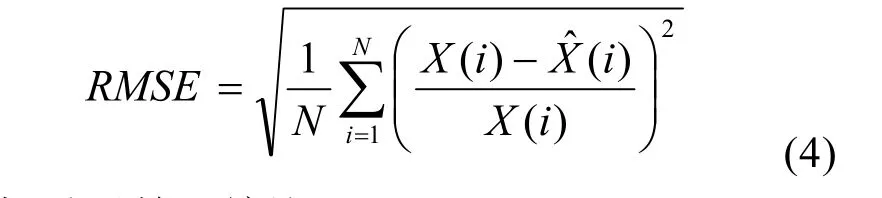
測試評估系統是基于性能評估方法設計的,用于對目標跟蹤算法的性能進行評估。常用的性能評估指標有:均值誤差(ME)、相對均值誤差(RME)、均方差(MSE)、相對均方誤差(RMSE)、相對誤差壓縮比(RECR)、反應時間(RT)等[6]。
均值誤差:

相對均值誤差:

均方差:
相對均方誤差:
相對誤差壓縮比:
反應時間:

其中,(i)、X(i)、Z(i)分別為i時刻的濾波值、理論值、觀測值。
結合Monte Carlo仿真分析方法,利用數據庫的查詢和統計功能,對濾波值、理論值、觀測值進行比較,獲得均方差(MSE)、相對誤差壓縮比(RECR)、反應時間(RT)等評估結果,并在仿真演示界面上直觀地顯示出來[7]。數據流示意圖如圖6所示。
4 仿真實例
針對導彈末端做躍升俯沖攻擊的運動態勢,進行初始設置并運行仿真系統。初始設置如下:導彈開始躍升機動時的坐標為(2000 m,5 m),速度為850 m/s,切向加速度為10 m/s2,躍升時法向加速度為10 m/s2,俯沖時法向加速度為-10 m/s2;雷達測距誤差為10 m,測角誤差為1.5 mrad;采樣間隔為0.01 s。
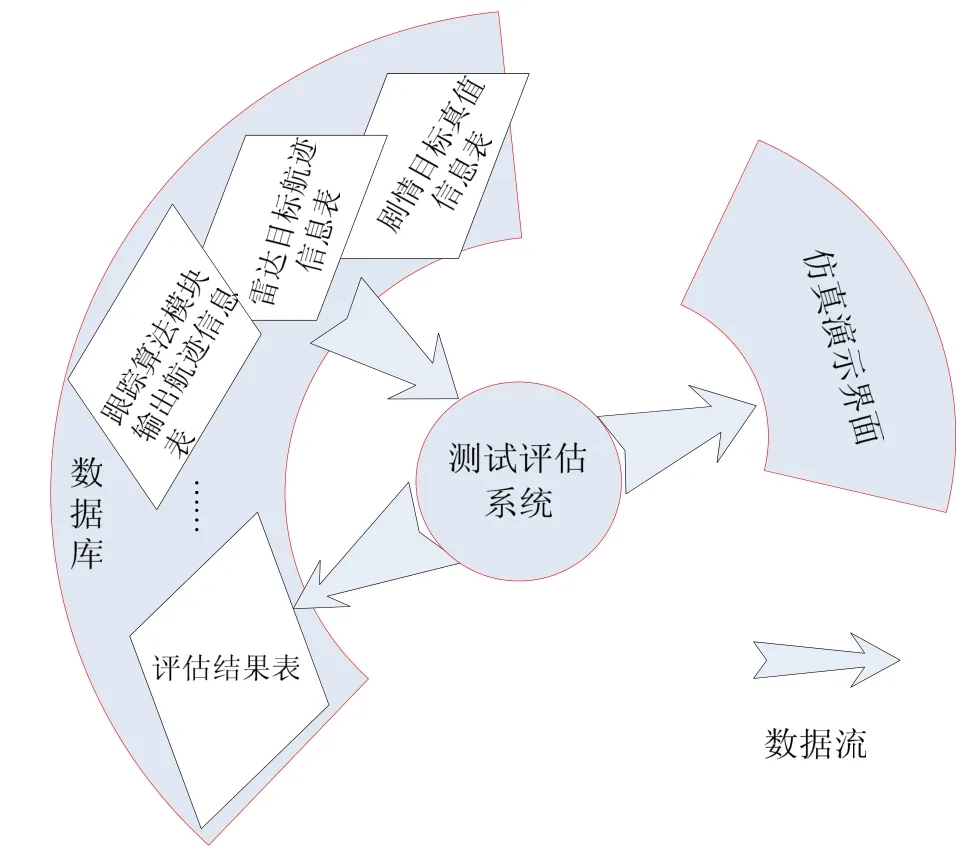
圖6 測試評估系統數據流程圖
啟動基于彈道規律的機動目標跟蹤算法,仿真系統運行結果如圖7所示。系統運行過程中,可以直觀地顯示跟蹤算法對仿真實例的處理過程,可信度較高。
5 結論
本文主要介紹了機動目標跟蹤系統仿真軟件的設計思路和方法,并給出劇情生成、跟蹤算法實現和測試評估等主要模塊的相關功能設計方案。軟件采用C/S(Client/Serve)體系結構和面向對象的模塊化設計思想,分工具體,實時性較好,利用劇情生成模塊模擬雷達探測到的目標運動數據,通過跟蹤算法對目標實施跟蹤處理,估計目標運動狀態,實時地在演示界面上顯示目標運動信息和跟蹤性能評估結果,為機動目標跟蹤算法研究搭建了一個具有較高可信度的、直觀的仿真系統。
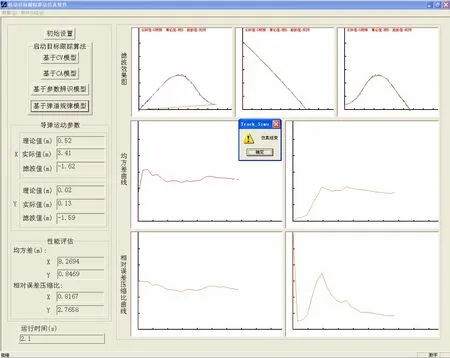
圖7 基于彈道規律的機動目標跟蹤算法仿真實例
:
[1]趙敏. 機動目標跟蹤理論的研究及其應用[D]. 西安: 西北工業大學, 2006.
[2]朱志宇, 姜長生, 張兵. 多傳感器多機動目標跟蹤方法研究進展[J]. 現代防御技術, 2005, 33(5):60-66.
[3]張樹春, 胡廣大, 劉思華. 跟蹤彈道目標的幾種次最優濾波器[J]. 系統仿真學報, 2005, 17(3):601-603.
[4]Farina A, Ristic B, Benvenuti D. Tracking a ballistic target: comparison of several non-linear filters[J].IEEE Trans. Aerospace and Electronic Systems(S0018-9251), 2002, 38(3): 854-867.
[5]求是科技. Visual C++ 6.0數據庫開發技術與工程實踐[M]. 北京: 人民郵電出版社, 2004.
[6]石章松, 周豐, 孫世巖. 目標跟蹤與數據融合理論及其應用[M]. 武漢: 海軍工程大學, 2007.
[7]李現勇. Visual C++ 6.0串口通信技術與工程實踐[M]. 北京: 人民郵電出版社, 2002.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32